基于無人機載多光譜相機的海面溢油分類方法研究
2021-08-17 05:25:26尹松林崔子浩田兆碩
應用海洋學學報 2021年3期
王 暢,尹松林,高 陽,崔子浩,田兆碩,2*
(1.哈爾濱工業大學(威海)船海光電裝備研究所,山東 威海 264209; 2.山東船舶技術研究院,山東 威海 264209)
海面溢油是海洋中危害最大,也是最為常見的污染物。石油在海面迅速散開后,形成油膜,海面上的油膜會對海水吸收氧氣造成極大影響,不僅嚴重危害海洋中植物的光合作用,還導致海洋中的浮游生物缺少氧氣而大量死亡[1-2]。
多光譜遙感技術是一種被動光學探測技術,它能夠同時獲得目標的光譜特征及其空間信息,可以更加精確地識別海面溢油污染[3]。其圖譜合一的特性,可以更直觀地將油污在圖像上標記出來,故多光譜遙感技術十分適用于海面溢油探測。衛星遙感具有全天候監測、海面探測范圍廣等優勢,但衛星遙感受氣象條件影響較大,空間分辨率和時間分辨率不高,影響它在海洋溢油應用中的監測精度[4]。無人機(Unmanned Aerial Vehicle, UAV)作為新型遙感監測平臺,能夠搭載多種傳感器設備,具有靈活性、機動性等特點。當發生海洋溢油事故時,無人機可以迅速到達溢油污染區域,記錄溢油位置和擴散情況[5]。與其他機載遙感技術相比,多旋翼無人機具有優良的機動性與靈活性,能搭載多光譜相機,進行遙感溢油分布情況探測[6]。
遙感圖像分類是遙感應用系統中的關鍵步驟,快速、高精度的遙感圖像分類算法是實現各種實際應用的前提,可分為監督分類[7]和非監督分類。目前,最大似然法[8-10]、支持向量機[11-13]、混合像元分類[14]、多項式邏輯回歸[15-16]以及決策樹分類等方法已經在溢油污染探測方面有了較為廣泛的應用。基于以上描述,本研究主要研制了無人機載多光譜油污探測系統,通過室外模擬實驗分析最大似然法、最小距離法和光譜角填圖法3種分類方法提取溢油信息效果,并將最佳分類方法應用于實際港口實驗區多光譜相機數據的溢油信息提取,從而證明無人機載多光譜相機可應用于海面溢油分類,具有實際應用價值。
1 油污探測系統設計
無人機載多光譜相機系統大體可分為兩部分,無人機載部分和地面站部分,通過無線和電臺進行數據傳輸。無人機載部分主要由多光譜相機(CMOSIS CMV2000)、微型電腦、差分GPS移動站及其電臺、路由器、信號放大器以及各部分供電所需的電池等組成。地面站部分主要有差分GPS基準站及其電臺、無線(Access Point,AP)接收機、電腦等構成。多光譜相機主要性能參數如表1所示。圖1為無人機載多光譜相機油污探測整體系統結構示意圖。

表1 CMOSIS CMV2000傳感器主要技術參數
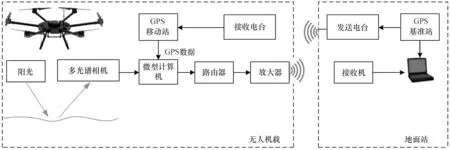
圖1 系統結構示意圖
本實驗使用的是六旋翼無人機,多光譜相機固定在機身的碳纖維圓桿上,實時動態(Real-time Kinematic, RTK)GPS天線部分安裝于無人機上方,電臺、微型電腦、無線路由、信號放大器、供電電源等設備安裝于無人機起落架上,如圖2所示。本實驗使用差分GPS進行定位及導航。通過地面的飛控軟件,控制無人機在溢油區域上空進行飛行作業。機載微型計算機通過Wi-Fi連接無線路由器,信號經過放大器進行放大,并與地面的AP接收機進行無線局域網的構建。通過計算機的遠程桌面打開HSImager軟件控制多光譜相機,調節曝光時間與采集速度,并采集多光譜圖像。圖像經過后續的分類處理將油污在圖像中標記出來,形成偽彩色的分類圖像。
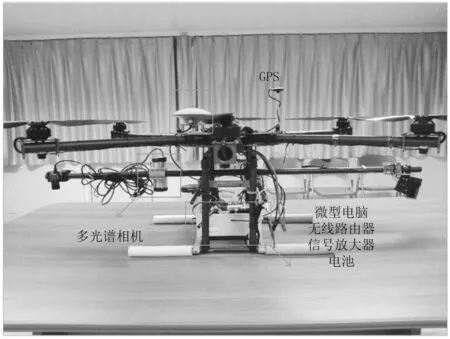
圖2 無人機載多光譜相機油污探測系統實物圖
2 結果與討論
2.1 水面圖像分類實驗
利用多光譜油污探測系統進行了室外模擬實驗,實驗時環境溫度為-5 ℃左右。使用1.60 m×0.70 m×0.50 m(長×寬×高)的水池,并裝有0.40 m高的清水,水池表面結有部分浮冰。在水面滴入美孚46號潤滑油,油在水面擴散過程中形成油膜,此時水面有不同厚度的油膜和浮冰。將多光譜相機固定在距離水面3 m高的支架上,垂直向下對水池進行成像,獲得有水、冰、油膜的多光譜圖像。實驗獲得的多光譜圖像如圖3所示。
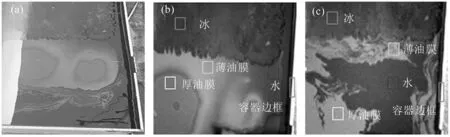
圖3 水面溢油實驗圖像
圖3(a)為水面溢油實驗時的數碼照片;圖3(b)為滴入潤滑油后(0 min)的RGB多光譜圖像;圖3(c)為油在水面擴散10 min后的RGB多光譜圖像。其中R部分為第18波段,波長為917.85 nm;G部分為第12波段,波長為756.19 nm;B部分為第6波段,波長為792.80 nm。由于圖像可以明顯區分冰、水及不同厚度的油膜,所以使用遙感圖像處理平臺(The Environment for Visualizing Images,ENVI)對多光譜圖像進行監督分類,首先在兩幅多光譜圖像中用不同顏色選取感興趣區域作為樣本,一共定義6類樣本,分別為冰、水、薄油膜、厚油膜、相對厚油膜、容器邊框。然后使用ENVI中的訓練樣本可分離工具計算任意類別間的統計距離。每個感興趣區域互相組合并通過Jeffries-Matusita距離(兩個樣本間的向量距離)和轉換分離度算法進行計算,來衡量訓練樣本的可分離性。當分離性的值大于1.90時說明樣本之間可分離性好,小于1.00時將兩種樣本劃分為一類。此實驗得到的水和冰的分離性為1.16,小于1.90,分離程度較差,其它樣本兩兩分離程度較好,均大于1.90。本研究使用所有25個波段的中心波長值,通過統計特征的方法進行3種分類的運算處理。最后分別利用最大似然法、最小距離法、光譜角填圖法3種方法對圖3(b)、(c)進行監督分類,實驗分類結果如圖4所示。
圖4(a)、(d)分別為溢油實驗(0 min)和溢油實驗(10 min)的最大似然法分類結果圖,設置似然度閾值為0.50,數據比例系數為255。對原始圖像進行分類,并對分類結果進行評價,如表2所示。根據混淆矩陣計算,前者總分類精度為51.90%,Kappa系數為0.47;后者總分類精度為90.71%,Kappa系數為0.88,分類方法較好提取目標,但由于水和冰相似度較高,會將冰誤判為水。圖4(b)、(e)分別為溢油實驗(0 min)和溢油實驗(10 min)的最小距離法分類結果圖,設置所有類別標準差閾值為4,不設最大距離誤差,其前者總分類精度為42.40%,Kappa系數為0.36;后者總分類精度為36.17%,Kappa系數為0.25。從整體提取結果上來看,將水誤判成冰的分類結果較為嚴重,將油水混合區的薄油膜層誤判為冰存在過分割的缺陷。圖4(c)、(f)分別為溢油實驗(0 min)和溢油實驗(10 min)的光譜角填圖法分類結果圖,其前者總分類精度為85.09%,Kappa系數為0.82。各個類別的分類精度也相對均勻,其中厚油膜的分類精度為76.00%,薄油膜的分類精度為92.29%,相對厚油膜的精度為77.09%,水體的分類精度達到86.11%,冰的分類精度為87.06%;后者無論是在油水混合層還是冰層,都有較好的提取結果,優于其它兩種方法,其總分類精度為92.37%,Kappa系數為0.90。光譜角填圖法在應用于邊緣信息模糊的油水混合區域時,能較好的區分溢油和海水。

表2 實驗分類精度評價
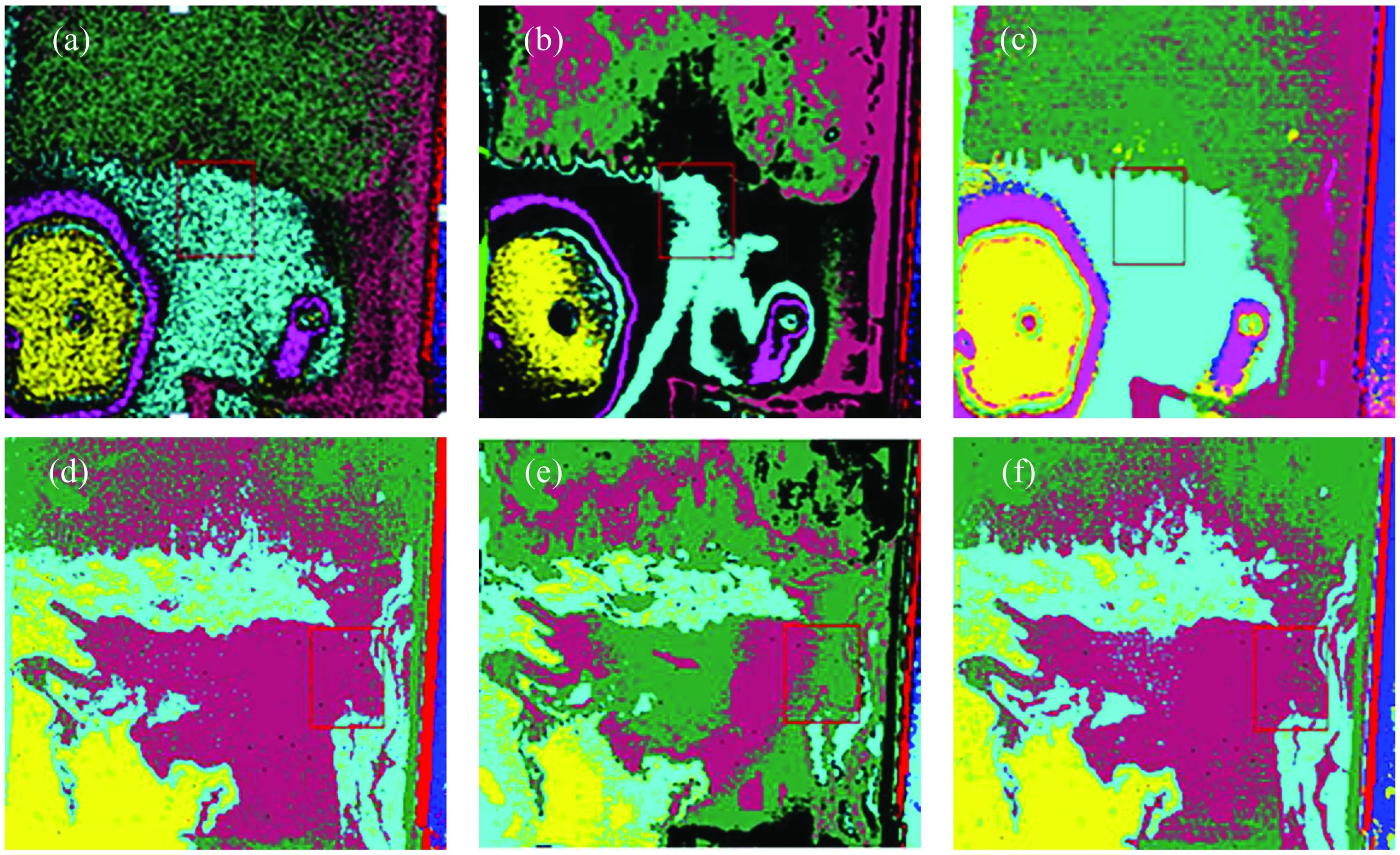
圖4 實驗分類結果圖
綜上所述,根據總分類精度和Kappa系數作對比,最大似然法的分類精度明顯高于最小距離法,但在分類速度上會略小于最小距離法。與最小距離法和最大似然法的分類結果相比,光譜角填圖分類方法的分類結果明顯好于其他兩種方法,且精度較高,故海面實驗使用光譜角填圖分類方法對多光譜圖像進行處理來獲得溢油區域的信息。
2.2 海面油污探測實驗
使用機載多光譜探測系統進行實際海面油污探測實驗,實驗地點選擇在山東威海的一個小型漁港(圖5),船附近有少量油污溢出,無人機飛到溢油目標上方進行多光譜成像。

圖5 實驗溢油區域實物圖
通過地面站設計飛行路線,探測高度為20 m,探測面積為22 m2。通過局域網打開軟件控制多光譜相機,設置相機采集速率為10 fps,曝光時間為50 ms,并對溢油區域進行拍攝。將拍攝到的原始多光譜圖像進行保存(圖6)。將原始圖像通過目視解譯和當時的實地觀察得到獲取船、溢油、水沙灘的真實感興趣區(圖7)。使用光譜角填圖分類法對其進行分類,分類結果如圖8所示。使用ENVI中混淆矩陣(Confusion Matrix)工具把真實感興趣區的像元與最終分類結果相匹配建立混淆矩陣,并根據混淆矩陣對光譜角填圖算法進行精度評價,如表3所示。各個部分分類精度都相對較高,錯分誤差整體低于30.00%,除船的漏分誤差相對較高外,其它都在允許范圍內,溢油圖像區域制圖精度達到99.57%,各個部分的用戶精度都達到70.00%以上,總分類精度為80.98%,Kappa系數為0.74。光譜角填圖分類方法整體精度高,適合該系統的溢油分類方法。

圖6 海上溢油的原始圖像
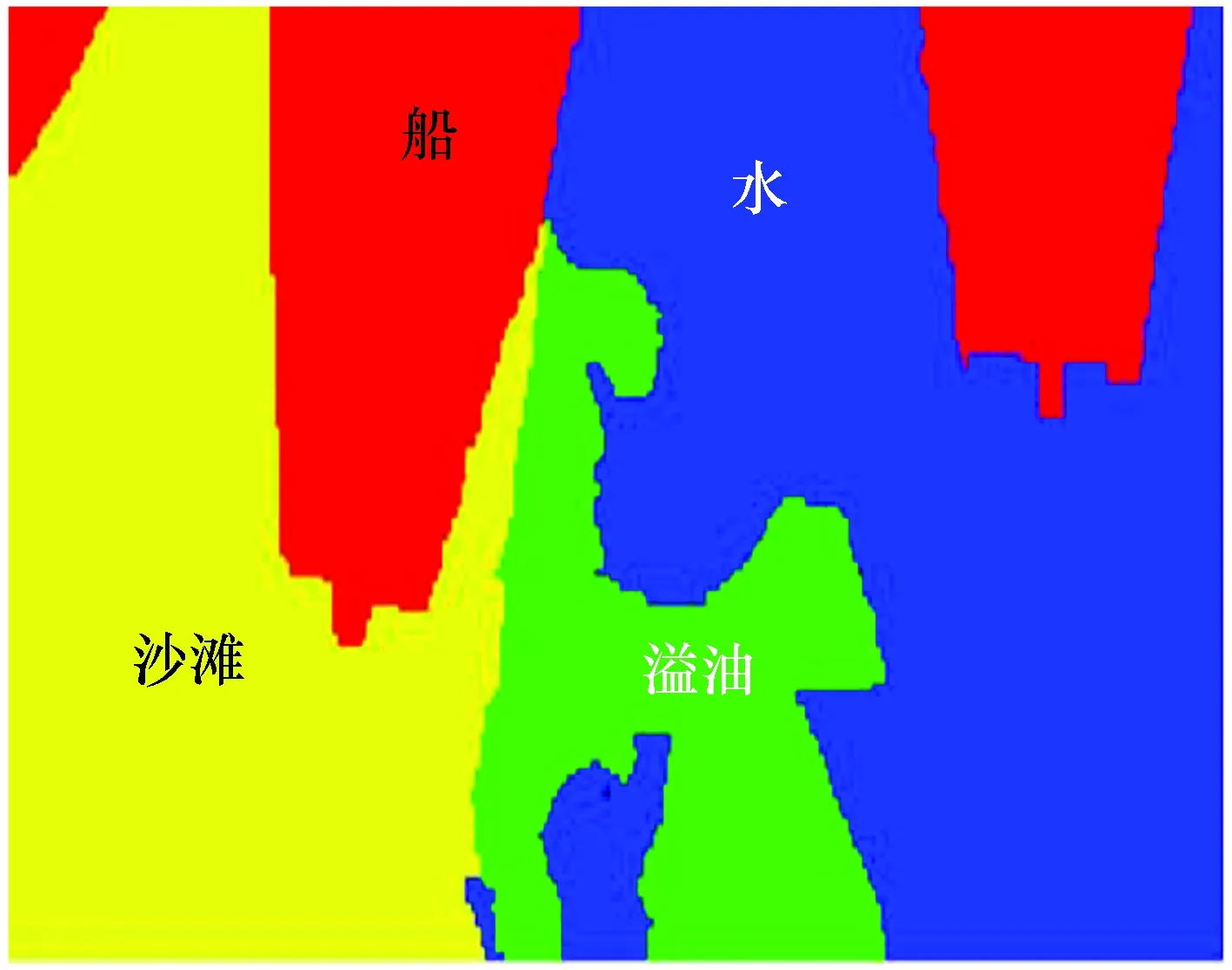
圖7 海上溢油的真實數據圖
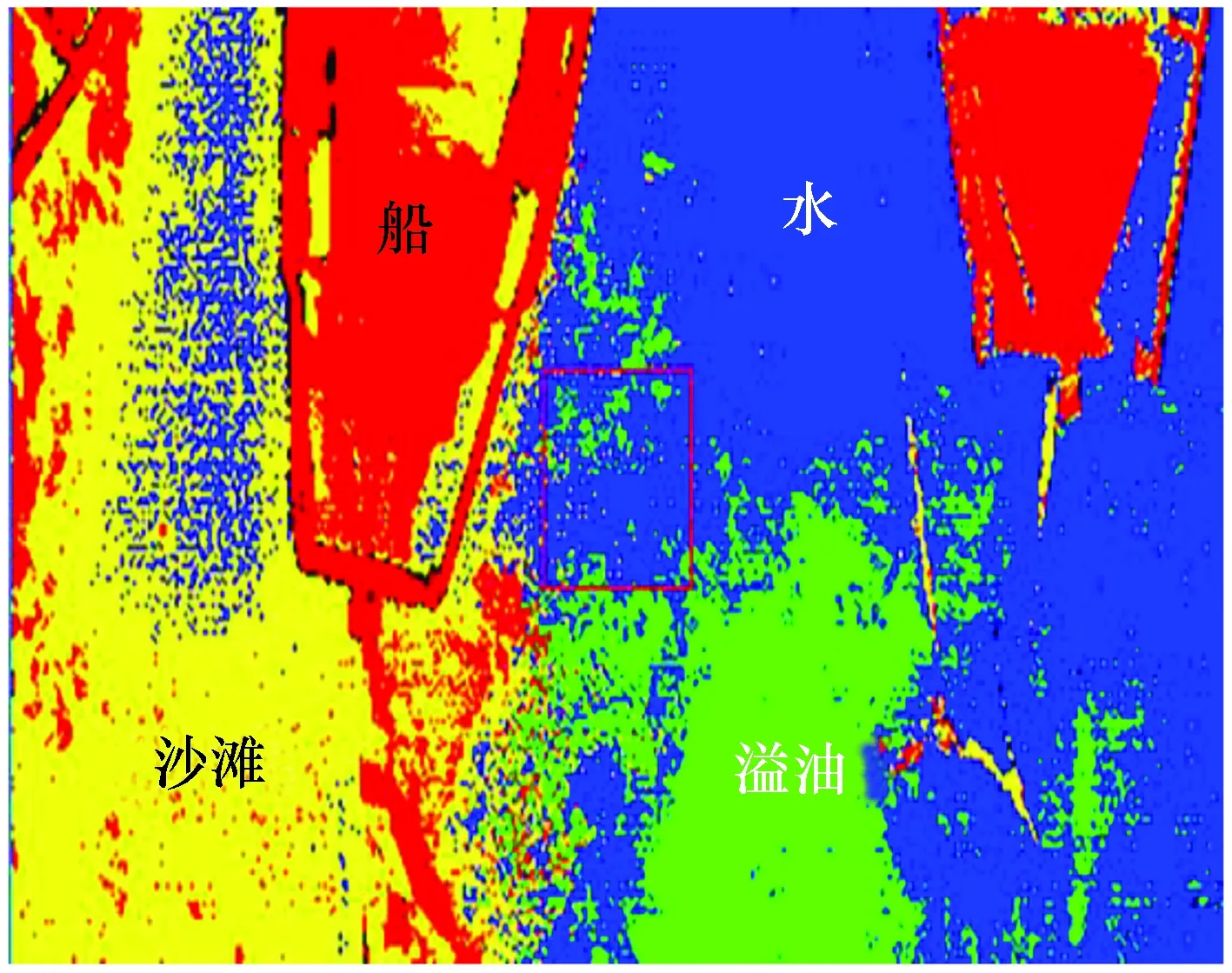
圖8 海上溢油的光譜角填圖分類法結果圖
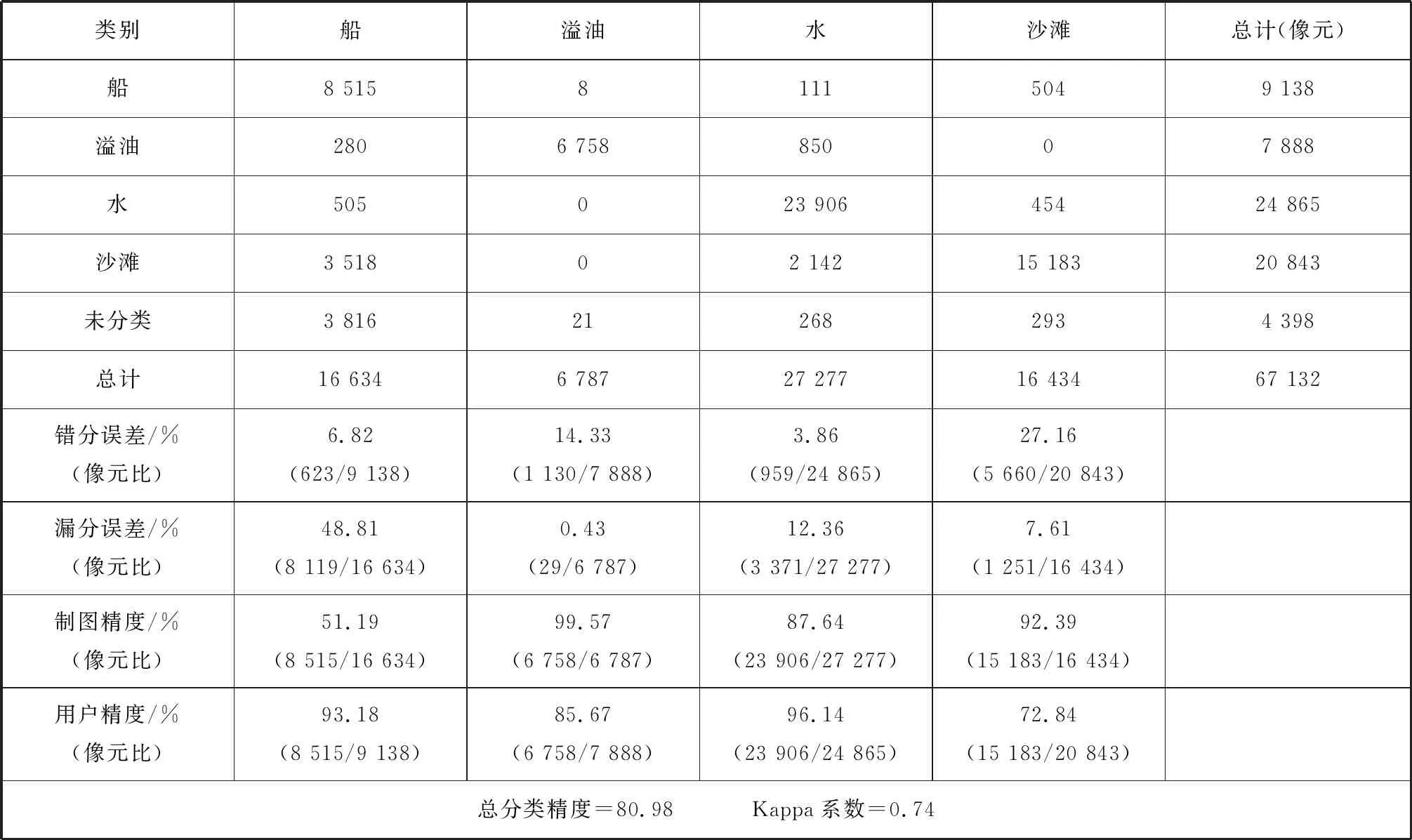
表3 海上溢油分類混淆矩陣表
3 結論
基于多光譜遙感技術,本研究設計了無人機載多光譜油污探測系統,并利用最大似然法、最小距離法以及光譜角填圖法對多光譜圖像進行分類,通過混淆矩陣對3種方法進行精度評價。實驗表明,光譜角填圖法分類效果最好,可將水、冰、薄油膜、厚油膜進行區分,總分類精度達到90.00%以上,明顯高于其他兩種方法。海面溢油探測實驗中,利用自研的無人機載多光譜系統對溢油區域進行探測,并基于光譜角填圖法對多光譜圖像進行分類,驗證該系統的溢油探測功能。研究表明,無人機搭載多光譜相機具有實時性、速度快的優點,可抵近或飛入溢油危險區,高效地獲得水面溢油信息,可有效地彌補衛星平臺的不足,實現對水面溢油污染情況的監測,并為相關人員清理溢油提供指導作用,將在海洋溢油遙感探測中發揮巨大作用。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
