一種基于介電彈性體驅動的軟體機器人設計方法
2021-08-19 08:22:10閆茜茜何田
青島大學學報(工程技術版) 2021年3期
關鍵詞:設計
閆茜茜 何田
摘要:? 針對某些極端環境下不利于人工操作的工程探測問題,本文通過對軟體機器人材料、結構、制造方法以及步態控制4個方面進行研究,提出了一種新型4足爬行軟體機器人的設計方法。機器人身體是由硅酮介電彈性體(dielectric elastomer,DE)薄膜和單壁碳納米管薄膜組成的一種柔軟結構,為降低軟體機器人驅動電壓,限制了DE和單壁碳納米管薄膜的層厚。同時,為增大輸出力,采用DE疊層結構,以支撐機器人身體的質量。研究結果表明,該軟體機器人長為106 mm,由6個堆疊式介電彈性體驅動器(dielectric elastomer actuator,DEA)驅動,具有驅動電壓較低、響應速度快、結構緊湊且輸出力及位移較大等特點。該研究為后續模型的制作及機器人的應用奠定了基礎。
關鍵詞:? 介電彈性體; 軟體機器人; 設計
中圖分類號: TP242.3? 文獻標識碼: A
收稿日期: 20210429; 修回日期: 20210603
基金項目: 國防科技創新特區基金資助項目(2019)
作者簡介:? 閆茜茜(1994),女,碩士研究生,主要研究方向為自主柔性智能體。
通信作者:? 何田(1971),男,博士,講師,主要研究方向為自主柔性智能體。 Email: het@qdu.edu.cn
傳統的剛性機器人無法適應復雜多變的操作環境,所以柔軟且可變形機器人逐漸成為研究熱點[13]。隨著材料科學的進步,科研人員通過模仿自然界的軟體動物,開發了各種各樣的軟體機器人,如爬行機器人[4]、行走機器人[56]、昆蟲機器人[7]和水下機器人[8]等。介電彈性體(dielectric elastomer,DE)是一類典型的智能軟材料,其能量密度與動物肌肉非常接近,可應用于軟體機器人。目前,國內外對基于DE驅動的軟體機器人的研究越來越多。Li G等人[9]設計了仿生獅子魚機器人,該機器人能在10 900 m深的馬里亞納海溝游動;M. Shintake等人[10]設計的質量只有1 g的介電彈性體驅動器(dielectric elastomer actuator,DEA),能提起質量60 g的雞蛋;C. Christianson等人[11]使用液體作為電極的無框架DEA,能在水下進行偽裝而不被周圍的海洋生物發現。但對于能在極端環境下執行探測任務的陸地爬行機器人的研究非常有限,且大多數為實驗室模型。基于此,本文提出了一種驅動電壓較低、響應速度快、結構緊湊且輸出力及位移較大的軟體機器人設計方法。通過對軟體機器人的材料、結構、制造方法以及步態控制4個方面進行研究,得到了可在極端環境下爬行的4足軟體機器人。該機器人具有硅酮介電體及單壁碳納米管柔性電極組合的堆疊式DEA結構和高度集成的電子控件。該研究為軟體機器人模型制作奠定了基礎,具有重要的指導意義和應用價值。
1 軟體機器人的設計原理及方法
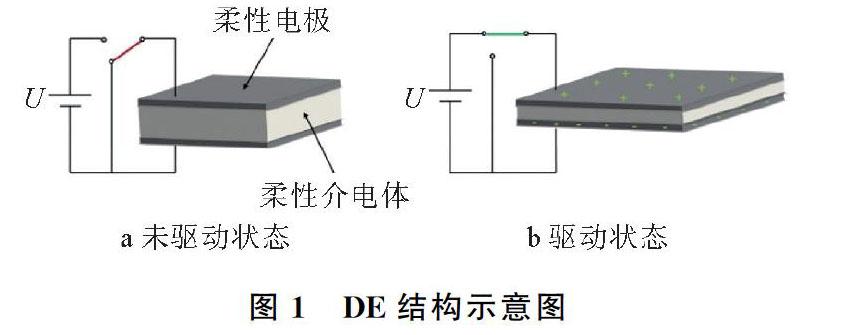
本文所設計的4足爬行軟體機器人,長約10 cm,驅動頻率為1~10 Hz,驅動電壓控制在2 kV以下,且位移較大。該機器人由機身和4條腿組成。由于機身要負載集成電子控件,所以機身由2個DEA同時驅動,4條腿分別由1個DEA驅動,DEA是由DE堆疊而成。DE結構示意圖[13]如圖1所示。DE通常由2個柔性電極層及夾在電極層之間的柔性介電體組成,圖1a表示未施加驅動電壓時的狀態,圖1b表示施加驅動電壓時的狀態,DE在電場作用下,其內部的正、負電荷會在2個相對表面進行聚集,彈性體薄膜受麥克斯韋應力的驅使產生驅動應變,從而厚度減小,表面積增大[12]。
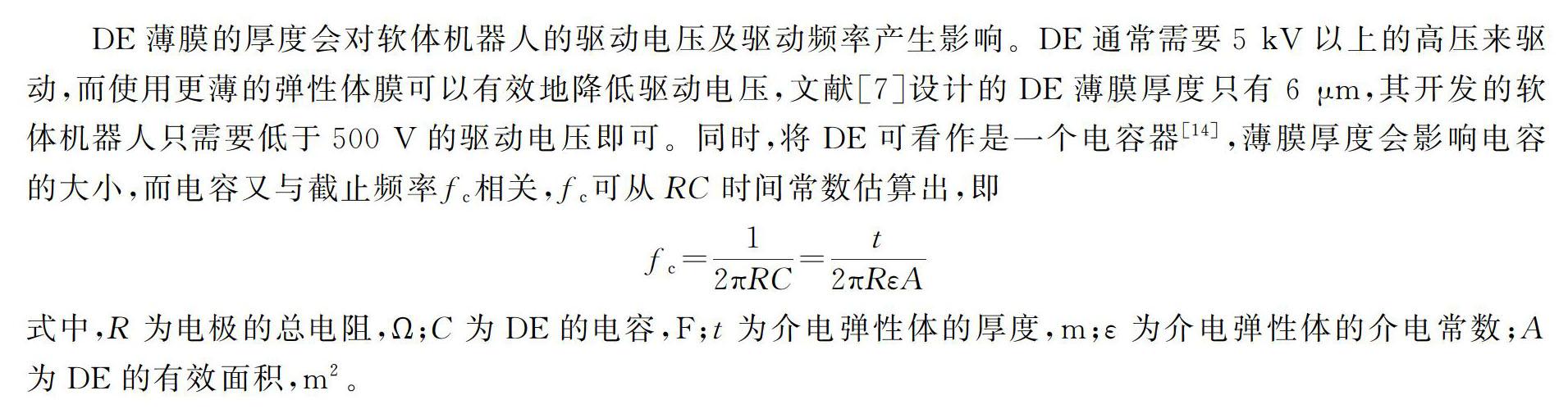
DE薄膜的厚度會對軟體機器人的驅動電壓及驅動頻率產生影響。DE通常需要5 kV以上的高壓來驅動,而使用更薄的彈性體膜可以有效地降低驅動電壓,文獻[7]設計的DE薄膜厚度只有6 μm,其開發的軟體機器人只需要低于500 V的驅動電壓即可。同時,將DE可看作是一個電容器[14],薄膜厚度會影響電容的大小,而電容又與截止頻率fc相關,fc可從RC時間常數估算出,即
fc=12πRC=t2πRεA
式中,R為電極的總電阻,Ω;C為DE的電容,F;t為介電彈性體的厚度,m;ε為介電彈性體的介電常數;A為DE的有效面積,m2。
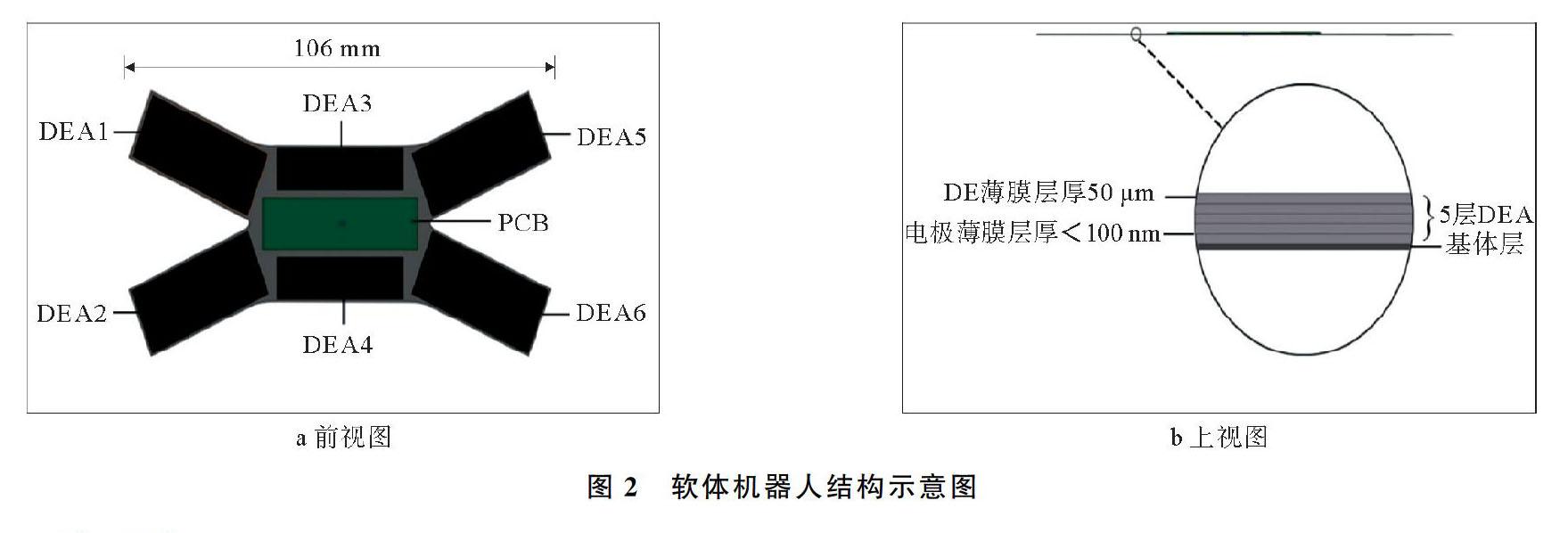
厚度低于100 nm的碳納米管電極的電阻可以做到小于1 000 MΩ,為了滿足驅動頻率和驅動電壓的要求,并根據前人經驗,最終選定DE薄膜的厚度為50 μm[7,15]。結合機器人外形,設計DE薄膜的長度為30 mm,寬度有兩個規格,一個是應用于腿部,規格為13 mm,另一個是應用于機身,規格為8 mm。
由于超薄的彈性體膜容易發生失效,導致整個驅動器無法工作,而疊層結構的應用可以很好的抑制失效的發生。文獻[1516]開發了一種12層DEA的制造方法,并將這種方法應用于軟體機器人設計,實驗表明,該機器人具有較好的魯棒性。同時,用于軟體機器人的功率轉換器,市售質量小于5 g,加上電池、通訊模塊和控制模塊,集成電子控件的總質量可控制在40 g以下。為使機器人能產生站立姿態,DEA的輸出力應能克服整個機器人的質量,所以本實驗采取5層疊層結構。
2 軟體機器人設計
2.1 材料選擇
用于軟體機器人的介電體材料有丙烯酸酯、硅酮彈性體、聚氨酯和天然橡膠等。其中,丙烯酸酯能產生較大的變形,易與其他材料粘合,因此適合多層DE驅動器制作,但有很強的粘滯性,機電響應速度慢,且輸出力較小。硅酮彈性體粘彈性較低,彈性模量大,機械重復性高,壽命長,其缺點是介電常數低,導致產生一定的應變,需要相對更高的驅動電壓,也會造成其能量密度較低。
本文設計的軟體機器人選用硅酮彈性體以滿足快速響應、大形變和較高輸出力的要求。另外,導電填充物硅酮基彈性體的摻入,使DE具有更高的機電轉化率和穩定性[1718]。初始方案采用市售的單組分硅酮材料,或者是多組分硅酮復合材料。
應用廣泛的柔性電極有碳基柔性電極,碳納米管柔性電極,金屬柔性電極,離子水凝膠電極等[19]。科研人員也在不斷開發新的電極材料,以充分發揮軟體機器人的應用潛力。柔性電極要求具有較低的模量,能隨彈性體而形變,且在大形變條件下保持較好的導電性能。碳基柔性電極價格低廉、易于獲取,目前應用最為廣泛。碳納米管電極柔順性極高且無毒性,可以制造超薄的可拉伸電極,而在發生電擊穿時,碳納米管會在缺陷區域周圍蒸發,在電極兩側產生隔離效果,因此驅動器仍然可以正常運行,所以又被稱為“容錯電極”。金屬柔性電極導電性好,應用較多的是金、銀等金屬,為了滿足柔性要求,應盡可能減小電極的厚度和寬度[20]。離子水凝膠電極具有低的彈性模量和透明性,可應用于對透射率要求高的軟體機器人[21]。考慮到對電極厚度的要求,本文采用碳納米管電極。而在各類碳納米管材料中,單壁碳納米管在結構上具有更高的均勻一致性和更少的缺陷,滿足高電場強度的應用條件,所以本研究將采用市售單壁碳納米管材料,通過簡單的制備,獲得所需的彈性體薄膜。
機器人基體材料將采用市售聚對苯二甲酸乙二醇酯(polyethylene terephthalate,PET)薄膜,該材料具有一定的彈性模量,柔順性好,符合設計要求。另外,機器人的電源管理模塊、通訊模塊和控制模塊等電子組件將全部集成在同一印刷電路板(printed circuit board,PCB)上。
2.2 結構設計
軟體機器人結構示意圖如圖2所示。由圖2a可以看出,機器人由6個DEA組成,長106 mm,DEA1、DEA2、DEA5和DEA6分別控制機器人的4條腿,DEA3和DEA4同時控制機器人的身體;圖2b是對局部進行了放大,以展示結構細節。
2.3 薄膜制造
DE薄膜可通過注模、旋涂和3D打印等方法進行制備[22]。其中,3D打印技術又稱增材制造技術,具有快速成型、可縮短結構原型設計周期和滿足個性化要求等特點[3],與傳統的成型技術相比具有一定優勢,因此得到了廣泛應用。但由于材料種類的改變和打印精度的提高,需要對打印噴嘴進行定制化。考慮加工的便捷性,本文選擇涂膜或旋涂方法制備介電體薄膜。另外,柔性電極可以通過掩模、轉印、濺射沉積等工藝,均勻地覆蓋在薄膜兩側,本文采用LangmuirSchaefer方法,制備超薄單壁碳納米管電極[7]。
軟體機器人具體裝配過程是首先將電極薄膜轉移在PET薄膜上,同時對DE薄膜兩側進行表面活化處理(二苯甲酮溶液浸濕,再用氮氣干燥),以增加電極與DE膜的層間附著力。將表面活化后的DE膜轉移到電極表面,再重復進行電極和DE膜的轉移,直至完成圖2所示結構。為避免在較高驅動電壓下發生電擊穿、張力損失和力電失穩等失效形式,本文對DE薄膜進行一定比例的等雙軸預拉伸,以增強機電穩定性。
2.4 運動步態設計
通過模仿4足爬行動物,并參考哈佛大學報告的氣動爬行機器人[2324],設計軟體機器人的步態,按照一定時序,對6個DEA分別進行控制。其步態周期為2步,每步包括如下4種狀態:
1) 后腿和身體驅動,產生一個站立位置。
2) 后腿、身體以及在身體相對側的前腿被同時驅動,將重心從后腿轉移到前腿。
3) 對后腿釋放,同時繼續對前腿驅動,使機器人向前移動。
4) 對加壓前腿進行短暫釋放。
身體交替的兩側重復以上4種狀態,形成4條腿交替行走的步態。行走的步態時序如圖3所示,圖中橫坐標表示時間,“T”為一個步態周期,縱坐標表示在某一時刻各DEA驅動狀態。
行走的步態時序如表1所示。表1中,設定行走方向為正向向前,其中,“+”表示驅動,“-”表示釋放,“T”表示一個步態周期。
3 結束語
本文針對某些極端環境下不利于人工操作的工程探測問題,通過對軟體機器人材料、結構、制造方法以及步態控制4個方面進行研究,提出了一種新型4足爬行軟體機器人的設計方法。該機器人長106 mm,由6個堆疊DEA驅動,具有驅動電壓較低、響應速度快、結構緊湊且輸出力及位移較大等特點。將硅酮彈性體與單壁碳納米管電極組合的疊層DE及集成電子控件應用于4足爬行機器人,目前依然是一種富有創新性和挑戰性的研究。該研究為制作DEA奠定基礎,對軟體機器人的前期設計具有指導意義,也為機器人將來能在極端環境下執行任務提供可能。
參考文獻:
[1] Rus D, Tolley M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521: 467475.
[2] Jin B, Song H, Jiang R, et al. Programming a crystalline shape memory polymer network with thermoand photoreversible bonds toward a singlecomponent soft robot[J]. Science Advances, 2018, 4(1): 16.
[3] 李鐵風, 李國瑞, 梁藝鳴, 等. 軟體機器人結構機理與驅動材料研究綜述[J]. 力學學報, 2016, 48(4): 756766.
[4] Gu G, Zou J, Zhao R, et al. Soft wallclimbing robots[J]. Sci Robot, 2018, 3(25): 112.
[5] Morales D, Palleau E, Dickey M D, et al. Electroactuated hydrogel walkers with dual responsive legs[J]. Soft Matter, 2014, 10(9): 13371348.
[6] Nguyen C T, Phung H, Nguyen T D, et al. Multipledegreesoffreedom dielectric elastomer actuators for soft printable hexapod robot[J]. Sensors and Actuators A: Physical, 2017, 267: 505516.
[7] Ji X, Liu X, Cacucciolo V, et al. An autonomous untethered fast soft robotic insect driven by lowvoltage dielectric elastomer actuators[J]. Science Robotics, 2019, 4(37): 111.
[8] Shintake J, Cacucciolo V, Shea H, et al. Soft biomimetic fish robot made of dielectric elastomer actuators[J]. Soft Robotics, 2018, 5(4): 466474.
[9] Li G, Chen X, Zhou F, et al. Selfpowered soft robot in the mariana trench[J]. Nature, 2021, 591: 6671.
[10] Shintake J, Rosset S, Schubert B E, et al. DEA for soft robotics: 1gram actuator picks up a 60gram egg[C]∥Proceedings of SPIE the International Society for Optical Engineering. San Diego, California, United States: EAPAD, 2015: 16.
[11] Christianson C, Goldberg N N, Deheyn D D, et al. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators[J]. Science Robotics, 2018, 3(17): 18.
[12] 李國瑞. 介電高彈聚合物力電耦合調控與軟體機器人研究[D]. 杭州: 浙江大學, 2019.
[13] Madsen F B, Daugaard A E, Hvilsted S, et al. The current state of siliconebased dielectric elastomer transducers[J]. Macromolecular Rapid Communications, 2016, 37(5): 378413.
[14] Suo Z. Theory of dielectric elastomers[J]. Acta Mechanica Solida Sinica, 2010, 23(6): 549578.
[15] Duduta M, Clarke D R, Wood R J. A high speed soft robot based on dielectric elastomer actuators[C]∥IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, 2017: 43464351.
[16] Duduta M, Wood R J, Clarke D R. Multilayer dielectric elastomers for fast, programmable actuation without prestretch[J]. Advanced Materials, 2016, 28(36): 80588063.
[17] Haghiashtiani G, Habtour E, Park SH, et al. 3D printed electricallydriven soft actuators[J]. Extreme Mechanics Letters, 2018, 21: 18.
[18] Opris D M, Molberg M, Walder C, et al. New silicone composites for dielectric elastomer actuator applications in competition with acrylic foil[J]. Advanced Functional Materials, 2011, 21(18): 35313539.
[19] Rosset S, Shea H R. Flexible and stretchable electrodes for dielectric elastomer actuators[J]. Applied Physics A, 2013, 110(2): 281307.
[20] 崔超宇. 基于介電彈性體的雙穩態驅動器設計與分析[D]. 廣州: 華南理工大學, 2018.
[21] Li T, Li G, Liang Y, et al. Fastmoving soft electronic fish[J]. Science Advances, 2017, 3(4): 17.
[22] Li T, Zou Z, Mao G, et al. Agile and resilient insectscale robot[J]. Soft Robotics, 2019, 6(1): 133141.
[23] Shepherd R F, Ilievski F, Choi W, et al. Multigait soft robot[J]. Proceedings of the National Academy of Sciences of the United States of America, 2011, 108(51): 2040020403.
[24] Tolley M T, Shepherd R F, Mosadegh B, et al. A resilient, untethered soft robot[J]. Soft Robotics, 2014, 1(3): 213223.
A Design Method of Soft Robot Based on Dielectric Elastomer
YAN Xixi, HE Tian
(College of Mechanical and Electrical Engineering, Qingdao University, Qingdao 266071, China)
Abstract:? In view of some engineering detection problems that are not conducive to manual operation in extreme environment, this paper proposed a new design method of fourlegged crawling soft robot by studying the material, structure, manufacturing method and gait control of soft robot. The robot body is actuated by a soft structure composed of silicone dielectric elastomers (DEs) film and a singlewalled carbon nanotubes film. In order to reduce the driving voltage of the soft robot, the thickness of the DEs film and the singlewalled carbon nanotubes film is limited. At the same time, in order to increase the output force to support the weight of the robot body, the laminated structure of DEs is used. The design results show that the soft robot is 106 mm long and actuated by six stacked DEAs (dielectric elastomer actuators), which has the characteristics of low driving voltage, fast response speed, compact structure and large output force and displacement. The research laid a foundation for the subsequent model making and robot application.
Key words: dielectric elastomers; soft robots; design
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
