智能車輛隊列縱向安全控制研究綜述
2021-08-20 10:29:54吳兵唐豪
農業裝備與車輛工程 2021年7期
吳兵,唐豪
(200093 上海市 上海理工大學)
0 引言
智能交通系統(Intelligent transportation system,ITS)是未來實現高效、環保、經濟交通出行的發展方向[1],作為 ITS 技術的重要組成,車輛隊列行駛技術同樣得到越來越多的關注。基于智能化與網聯化的車輛隊列行駛技術已成為解決交通擁堵和節能環保等問題的主要發展方向,可以使同車道的車輛以較小的安全距離列隊行駛,從而減小車輛行駛中的空氣阻力,可大幅降低油耗,提高道路容量及交通流量,緩解交通擁堵,已成為國內外研究熱點[2-4]。
車輛隊列行駛的安全性是汽車隊列行駛控制技術的主要目標。在混合交通系統中存在各種各樣的交通場景會使車隊發生碰撞危險[5]。如圖1所示,在隊列正常行駛過程中,其他道路行駛的汽車可能會突然行駛到隊列前線;如圖2 所示,在隊列正常行駛過程中,在隊列前方行駛的汽車可能會突然減速;如圖3 所示,在隊列正常行駛過程中,隊列前方可能會突然出現障礙物,如突然穿過馬路的行人以及前方車輛掉落下來的物品等。這些情況都會使得隊列中的汽車突然減速,從而使隊列中的汽車發生碰撞。
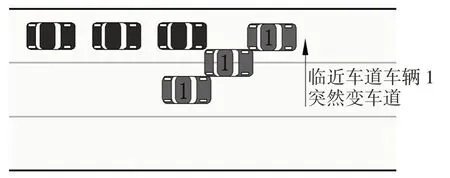
圖1 臨近車道車輛突然變車道Fig.1 Vehicles in adjacent lanes suddenly changing lanes
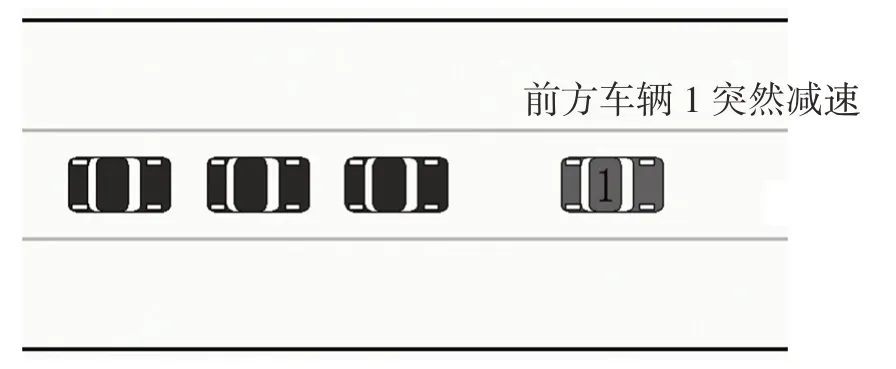
圖2 前方車輛突然減速Fig.2 Vehicle ahead suddenly slowing down
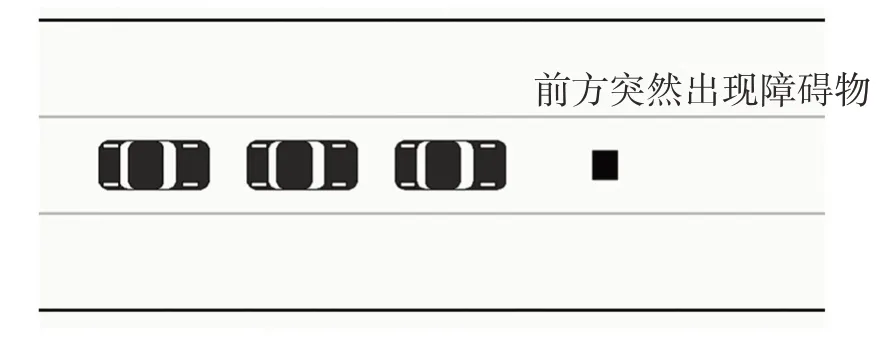
圖3 前方突然出現障礙物Fig.3 Obstacle suddenly appearing ahead
此外,車隊內車輛的制動產生的速度變化擾動會引發后車速度的調整,進而引起上游車輛的車速的連環波動,會導致車隊內碰撞的發生。為了保證車輛隊列行駛的安全性,隊列行駛的碰撞安全成為亟需解決的關鍵問題。
增加隊列車輛間距有助于降低碰撞風險,但會導致空氣阻力增加,增加油耗。Patten[6]等人的研究指出,通過縮短隊列車輛間距可以有效改善隊列中所有車輛的空氣動力學性能,降低車輛油耗。為了同時保證車輛隊列行駛安全性和經濟性,如何在保證不發生碰撞的前提下實現最小車輛間距成為研究者亟需解決的另一問題。
針對上述問題,本文從單車智能避撞控制、多車協同避撞控制兩個角度進行研究,分析指出多車協同避撞控制是未來發展的趨勢,并在此基礎上進一步探討了當前多車協同避撞控制策略存在的不足以及需要突破的關鍵技術,并對未來進行展望,提出了一種安全與節能博弈的多質量模型協同控制策略,為提高節能效果提供參考。
1 車隊縱向安全控制的研究現狀
針對車隊縱向安全控制問題,研究者們進行了廣泛的研究,按照研究角度主要分為車隊單車智能避撞控制和車隊多車協同避撞控制兩類。
1.1 車隊單車智能避撞控制
車隊單車智能避撞控制是指車隊行駛過程中,車隊中車輛通過基于車載傳感器或無線通信技術獲取的前車運動狀態信息進行獨立控制,以實時保證自我車輛能夠穩定跟隨前車,并不發生碰撞。基于單車智能避撞控制,國內外研究學者設計了多種多樣的縱向安全控制策略。
汽車跟隨模型(CF 模型)能夠有效表達相鄰車輛之間的相互作用關系,是設計單車智能避撞控制策略的重要理論基礎。基于CF 模型,研究者們設計了多種單車智能避撞控制策略,其中應用比較多的是車隊自適應巡航控制。針對車隊自適應巡航控制,研究者們設計了各種縱向安全間距策略,包括固定間距策略、可變間距策略,其中可變間距策略又分為固定時距策略和可變時距策略兩種。
固定間距策略是最為常用的間距策略,基于固定間距策略,研究者們設計了各種各樣的控制器,仿真結果顯示,采用固定間距策略可實現較小的車間距,可以使車隊控制的優點最大化[7-9]。但是文獻[10]指出,固定間距策略無法適應復雜交通環境,無法保證行駛過程中的車隊穩定性。為了克服固定間距策略下的各種問題,研究者們設計了固定時距策略。文獻[11]、文獻[12]采用固定時距策略進行研究,并各自設計了車隊控制器,仿真結果顯示,采用固定時距策略可以在復雜環境下保證單車及隊列穩定性。但是文獻[13]指出,采用固定時距策略,當車速較高時,車間距往往較大,會導致交通流不穩定。在固定間距和固定時距的基礎上,研究者進一步提出了一些基于可變時距策略的車隊控制方法[14-16]。文獻[14]設計了一種減小鄰車間距、提高交通容量的可變時距車隊控制方法;文獻[15]給出一種多工況異質車隊避撞的控制方法,仿真結果顯示,這些方法通過改變車間行駛時距,及時優化車間距,可以有效提高道路利用率、節約燃油,保證車隊穩定性、安全性;文獻[16]提出一種基于可變時距策略的PID 控制方法,仿真結果顯示,該控制方法能夠有效地降低油耗并保證車隊穩定。但是文獻[17]發現,采用可變時距策略的相關文獻并未提出可變時距策略的一般性分析方法,應用范圍有限、通用性不高。基于此,文獻[17]提出了一種通用可變時距策略,并設計控制器。仿真結果表明,所提出的通用可變時距策略可以實現車隊與交通流的穩定控制,改善車隊綜合性能。
盡管現有的各種單車智能避撞控制策略能夠部分有效地保證車隊穩定性和安全性,但車隊單車智能避撞控制策略依然存在著很嚴重的問題。由于單車智能避撞控制策略中車隊中每個車輛都是一個獨立的控制單元,每個車輛僅通過基于前車運動狀態信息進行獨立控制,整個車隊無法形成整體的協同控制策略,因此難以同時滿足車輛隊列行駛安全性和經濟性,甚至在車隊車輛數目過多時,難以滿足安全性要求。文獻[18]指出,單車智能避撞控制無法保證車隊穩定性。與單車行駛模式不同,車隊行駛中隊內車輛的速度變化產生的擾動會引起上游車輛的連環波動,在這一波動向車隊上游傳播的過程中,可能會導致速度和距離誤差逐級增加,造成車隊不穩定乃至上游發生車輛碰撞,嚴重影響車隊安全。此外,文獻[18]還指出,雖然可以通過在單車控制的基礎上進行隊列穩定性分析,找出保持車隊隊列穩定條件下車輛控制器的參數需要滿足的約束條件來保證車隊穩定性,但是這種方法也存在著問題,當車隊車輛數過多時,車隊穩定性依舊無法滿足。
針對車隊單車智能避撞控制存在的問題,國內外研究學者另辟蹊徑,從多車協同控制角度進行研究,旨在通過多車協同控制來使整個車隊形成整體的協同控制策略,從而更有效地提高整個車隊的安全性和經濟性。
1.2 車隊多車協同避撞控制
相比于單車智能避撞控制方式,多車協同避撞控制方式能夠獲得更高的經濟性和安全性,是未來發展的趨勢。
與車隊單車智能避撞控制不同,車隊多車協同避撞控制是指車隊行駛過程中,車隊中車輛通過利用無線通信技術獲得下游車輛行駛信息或者整個車隊車輛行駛信息進行協同控制,能夠有效地提高車隊行駛的安全性和經濟性。基于多車協同避撞控制,國內外研究學者設計了各種各樣的縱向安全控制策略,包括協調式自適應巡航控制方式(CACC)、預測巡航控制方式(PCC)、網聯巡航控制方式(CCC)、基于模型預測的多車協同控制方式等。
協調式自適應巡航控制方式[19-20]是指車隊中車輛采用無線通信技術,通過獲取鄰車和頭車行駛信息進行縱向速度控制。基于CACC,文獻[19]建立基于零階保持信息處理機制的自主駕駛車隊控制模型,通過非線性系統狀態估計算法進行延遲補償,使得車隊控制模型在復雜汽車行駛環境下保持有效。實驗驗證,該控制策略在實車編隊環境下具有很好的穩定性、有效性和實用性。CACC 能夠顯著提高車隊的經濟性,文獻[20]研究發現,當CACC 市場滲透率達到100%時,可以減少10%燃油消耗量。
盡管CACC 有巨大的潛力,能夠提高隊列穩定性和經濟性,但是CACC 也存在著許多問題。文獻[21]指出,當車隊下游擁堵且CACC 車輛處于自由流動狀態時,CACC 車輛無法提前降低速度或不再加速,會導致事故風險增加。此外,文獻[23]指出CACC 依賴于ACC 系統,需要車隊中每輛車都配備ACC 系統,在實際應用中很難滿足條件。
針對CACC 車輛處于自由流動狀態時,CACC 車輛無法提前降低速度或不再加速的問題,研究者設計了預測巡航控制方式。預測巡航控制方式[21-22]是指,車隊中車輛采用無線通信技術,通過獲取車隊下游所有車輛的行駛信息預測自車未來交通狀態來進行縱向控制。基于PCC,文獻[21]提出了一種針對下游交通狀況變化的車輛交通預測巡航控制系統,仿真結果顯示,該縱向控制策略能夠有效抑制來自車隊下游的沖擊波和消除不必要的減速和加速動作的影響,提高安全性和經濟性;文獻[22]提出了一種隨機模型預測控制方法來優化車輛跟隨環境中的燃料消耗,與標準自適應巡航控制算法相比,燃油消耗顯著降低。但是PCC 也存在一些問題,PCC 車輛需要與下游所有車輛進行通信,控制系統易受通信延遲、丟包、亂序的影響。
針對CACC 控制方式需要車隊中每輛車都配備ACC 系統問題,Orosz[23-25]等人首先提出了網聯巡航控制控制方式,并進行一系列研究。CCC允許車隊中存在未配備ACC 系統的常規車輛,通過CCC 控制器接收前方多輛車的運動信息,并根據這些信號驅動車輛或幫助駕駛員。基于CCC,文獻[23]提出了一類非線性、多輸入、比例積分速度加速類型的控制器,仿真結果證明該控制器具有較好的性能;在文獻[23]的基礎上,文獻[24]進一步研究,通過采用線性二次型調節來獲得連接巡航控制的優化設計,研究表明,通過分解優化問題,能夠顯著降低CCC 設計的復雜性;文獻[25]繼續研究,提出了一個基于人類駕駛行為平均動力學的最優連接巡航控制器,實驗數據證明,該估計算法和關聯巡航控制算法具有很好的性能。
上述多車協同控制策略均為自車利用獲取的信息進行獨立決策,而未采用統一優化多車制動減速度為目標,多車間仍未實現真正意義的協同,無法同時實現經濟性和安全性的最大化。
針對這一問題,國內王建強[26-27]等人率先進行研究,設計了基于模型預測的多車協同控制策略。文獻[26]提出一種基于車對車通信技術的多車協同控制策略,通過綜合考慮隊列運動學關系,基于模型預測控制,以總相對動能密度最小作為優化目標,將連續時間優化問題離散化為二次規劃的數值計算,以避免或減少隊列整體的碰撞損失,仿真結果顯示,該控制策略能夠顯著地減少隊列整體碰撞損失。在文獻[26]的基礎上,文獻[27]進一步研究,分析比較了其他3 種控制策略,即直接制動控制、基于駕駛員反應的制動控制和線性二次調節器控制。在典型場景和大量隨機場景下的仿真結果表明,所提出控制策略在這4 種策略中性能最好。但是,上述提出的基于模型預測的多車協同控制策略有一定的局限性,只考慮了隊列行駛過程中的頭車制動工況。考慮這一局限性,文獻[28]在考慮不同工況的前提下,設計了一種具有魯棒性和靈活性的隊列縱向控制策略。
雖然研究者們在多車協同避撞控制方面取得一些進展,但是這些控制策略也存在著許多不足。受現有技術限制,車輛之間信息傳輸存在著不可避免的通信延遲,然而,目前大多數控制策略沒有考慮通信延遲,這會顯著影響多車協同控制實際應用效果,甚至會出現嚴重的安全問題。車隊行駛過程有許多工況,如頭車加速、勻速行駛、頭車制動等工況,然而,目前大多數控制策略沒有同時考慮多種工況,而是僅僅考慮勻速行駛工況或者頭車制動工況。在實際復雜的工況條件下,僅僅通過縱向安全控制可能無法避免碰撞,這就需要通過考慮換道操作來解決這種問題,然而,到目前為止,同時考慮縱向安全控制和換道操作的研究成果不多。此外,目前大多數研究者沒有同時從經濟性和安全性兩個方面考慮設計控制策略,而是只考慮安全性而忽略經濟性,這會顯著增加車隊整體的油耗,無法實現經濟性最大化。這些不足大大限制著多車協同控制策略在實際的應用,如何解決這些不足,是研究者們亟待解決的問題。
2 多車協同避撞控制關鍵技術瓶頸
多車協同避撞控制的實際應用受許多關鍵技術的限制,其中影響最大的是V2X 通信技術和無人駕駛技術。本節分析討論了V2X 通信技術和無人駕駛技術,并進一步指出了各自亟待解決的問題。
2.1 V2X 通信技術瓶頸
V2X 通信技術是V2V(Vehicle to Vehicle,車車通信)、V2I(Vehicle to Instruction,車路通信)、V2P(Vehicle to Pedestrian,車人通信)等的統稱,通過V2X 可以獲得實時路況、道路信息、行人信息等交通信息,即利用無線通信技術實現車與車、車與道路之間、車與行人之間的信息交互[29-31],這正是多車協同控制過程中的比較關鍵的一部分,因此V2X 通信技術成為限制多車協同控制的關鍵技術。
受現有技術水平限制,目前V2X 采用的無線通信系統具有信道不穩定性的特征,會出現不可忽略的通信延遲、丟包、亂序現象,影響多車協同控制的性能。文獻[32]在分析車隊控制時,發現無線通信系統的通信丟包事件會惡化控制效果,導致控制系統不穩定;文獻[33]研究通信時延對車隊穩定性的影響,指出在實際設計和應用車隊控制策略時必須考慮通信延遲影響;文獻[34]指出,無線通信系統因為丟包、傳輸時間和路由選擇用時等原因,時常會存在通信延遲現象;文獻[19]指出在實際應用中,為達到車隊穩定行駛的目的,必須考慮通信延遲對車隊控制模型的影響及補償策略。雖然可以通過設計補償策略來保證控制策略的性能,但還是很難達到這些控制策略的理想性能,因此,如何解決無線通信系統信道不穩定問題,是研究者們需要進一步關注的問題。
隨著5G 技術的發展,基于5G 的車輛協同車聯網技術(5G-V2X)有望解決上述問題。基于 5G 的車路協同車聯網理論時延僅為1 ms,可實時傳輸汽車導航信息、位置信息以及汽車各個傳感器的數據到云端或其他車輛終端[35],可以有效解決現有無線通信技術通信延遲問題。目前,5G-V2X 技術研究還屬于初期階段,如何加速5G-V2X 技術應用于實際是研究者們亟待解決的問題。
2.2 無人駕駛技術瓶頸
車輛無人駕駛技術[36-39]是指通過車輛智能控制替代駕駛員實現自動駕駛,減少人為因素的干擾,可以在高速公路結構化道路環境下,提高交通效率,保證車輛行駛安全,是實現多車協同避撞控制的關鍵技術。
無人駕駛技術包括雷達、激光雷達、計算機視覺、GPS、攝像頭、操作系統、決策系統、高精地圖、實時定位、機械控制、能耗散熱管理等[38]。多車協同控制由3 個階段組成,包括協同感知、協同決策、協同執行,而這些關鍵階段的理想效果離不開這些關鍵技術。雷達、激光雷達、計算機視覺、GPS、攝像頭等技術、高精地圖、實時定位等技術影響著協同感知的理想效果,決策系統等技術影響著協同決策的理想效果,操作系統、機械控制等技術影響著協同執行的理想效果。多車協同控制理想效果的實現離不開這些關鍵技術,因此,如何綜合利用這些技術以及提高這些技術性能是研究者們亟待解決的問題。
多車協同控制技術的實現依賴于無人駕駛車輛,然而,目前無人駕駛車輛發展遇到很多技術障礙,包括惡劣天氣、行車安全、隱私保護、基礎設施不完善等[39]。在惡劣天氣里,無人駕駛車輛無法準確感知前車距離,或者分辨停車標志、交通燈和行人,從而無法良好運行。安全是無人駕駛車輛最重要的考慮因素,受技術限制,現有無人駕駛車輛易受到外部干擾,影響正常安全行駛。隱私泄露是無人駕駛車輛面臨另一障礙,無人駕駛過程中將收集大量關于人們位置、GPS 定位數據、活動信息,這些隱私一旦泄露會嚴重威脅人身安全。此外,基礎設施不完善的問題也嚴重限制了無人駕駛車輛的萌芽和起步。這些技術障礙限制著無人駕駛車輛的普及,從而影響著多車協同控制技術應用于實際,如何解決這些技術障礙是研究者們亟待解決的另一問題。
3 研究展望
如圖4 所示,針對車隊縱向安全控制問題,研究者們進行了廣泛研究,從單車智能避撞控制和多車協同避撞控制2 個方面設計了多種控制策略,包括車隊自適應巡航控制、協調式巡航控制、網聯巡航控制、基于模型預測的多車協同控制等。雖然已經有一定的成果,但當前的研究水平與實際應用還有相當的差距。
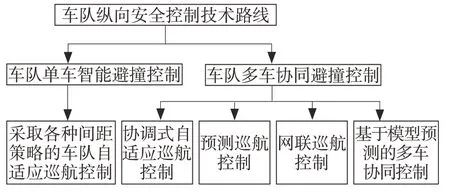
圖4 車隊縱向安全控制技術路線架構圖Fig.4 Technical roadmap of platoon longitudinal safety
由前文分析可知,多車避撞協同避撞控制方式是未來發展的趨勢,然而,現有的多車協同控制策略因受許多關鍵技術的限制以及存在許多不足,目前無法有效地應用于實際。因此,如何突破這些關鍵技術瓶頸以及解決這些不足是未來該領域亟待解決的問題。
此外,考慮現有技術水平限制,本文對未來進行展望,提出一種安全與節能博弈的多質量模型協同控制策略,旨在通過該策略解決一些不足,并同時實現經濟性和安全性最大化。該控制策略原理如下:在考慮通信延遲以及多種工況的基礎下,利用一種多質量模型進行協同控制,通過解決一個最優化問題,即如何在避免碰撞的前提下,保持最小車距,來同時實現經濟性和安全性最大化。
4 結語
本文綜述了縱向安全控制技術的研究現狀,從單車智能避撞控制與多車協同避撞控制兩個角度進行研究,分析指出多車協同避撞控制是未來縱向安全控制技術路線的發展趨勢。在此基礎上,本文進一步探討了當前多車協同避撞策略存在的不足以及限制多車協同避撞控制應用于實際的兩個關鍵技術:V2X 通信技術、無人駕駛技術。最后本文對未來進行展望,提出了一種安全與節能博弈的多質量模型協同控制策略,為提高節能效果提供參考。
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
數學大世界(2018年1期)2018-04-12 05:39:14
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
