改進人工魚群算法在無極繩絞車控制系統中的應用
2021-08-21 09:49:52吳姍姍
電子制作 2021年14期
吳姍姍
(安徽新華學院,安徽合肥,230088)
0 引言
煤炭工業發展迅速,煤炭生產過程中面臨著井下環境復雜,開采及運輸困難等難題。因此,保證井下作業安全變得尤為重要。無極繩絞車作為煤礦輔助運輸的重要方式之一,其承擔著運送物料和設備至采煤面的重要任務。無極繩絞車的安全和穩定行駛是保證煤炭生產順利進行的前提條件。傳統無極繩絞車控制系統雖然能夠實時監測無極繩絞車的運行情況,但是對位置參數的采樣數據處理不準確,造成監測的誤差,影響絞車的安全運行。人工魚群算法是通過模擬魚在水中的各種行為特點而提出的一種算法,其具有操作簡單,容易實現的特點。由于人工魚群算法存在尋優精度低等缺點,因此本文提出引入改進人工魚群算法,利用該算法對無極繩絞車控制系統中的位置參數進行優化。實驗證明,經過優化后的參數更精確,系統的安全性和穩定性更好,在很大程度上保證了煤炭生產的安全。
1 無極繩絞車控制系統的組成
無極繩絞車控制系統是由電動機,檢測模塊,控制模塊,顯示模塊、報警模塊以及保護模塊等組成。系統通過檢測模塊實時檢測無極繩絞車的運行速度,將采樣的數據送入控制模塊中。PLC作為控制模塊的核心部分,將采樣的數據進行分析處理,最終的處理結果由顯示模塊和報警模塊輸出。保護模塊保護控制系統電路的安全。系統組成框圖如圖1所示。
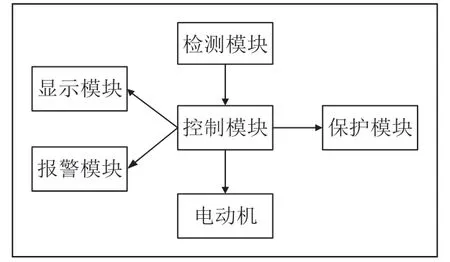
圖1 無極繩絞車控制系統框圖
2 改進人工魚群算法
人工魚群算法是模擬魚在水中的一系列行為而提出的。魚在水中生存,會跟隨伙伴尋找食物,食物多的水域魚的數量也會多。根據此特點,人工魚群算法提出通過模擬魚在水中覓食、聚群、追尾和隨機行為來尋找最優解。但是人工魚群算法存在尋優結果精度低和運算速度慢等缺點,因此本文提出一種改進的人工魚群算法。該算法能夠克服人工魚群算法存在的問題,實現尋優。
■2.1 算法簡介
改進人工魚群算法(Attack Artificial Fish Swarm Algorithm, AAFSA)是指在人工魚原有的覓食,隨機,追尾和聚群行為中加入攻擊行為。魚在水中生存時,尤其在水中食物少的時候會因為爭奪食物而發生攻擊其他魚的行為。此算法的核心思想就是本著遵循自然魚群行為原則,適當增加聚的能力,同時增加隨機行為,有利于跳出局部最優,實現全局尋優。
N為人工魚的總數,人工魚個體的狀態為X= (x1,x2,… ,xn),步長為Step,視野為Visual,嘗試次數為Try_numberTty_number,擁擠度因子為δ,人工魚個體i,j之間的距離為dij=‖X i?Xj‖。
(1)覓食行為
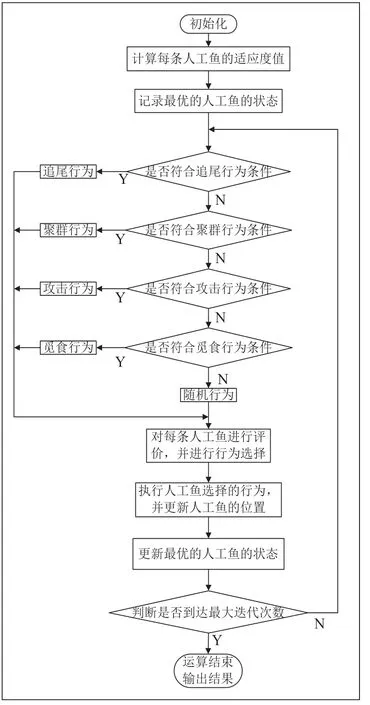
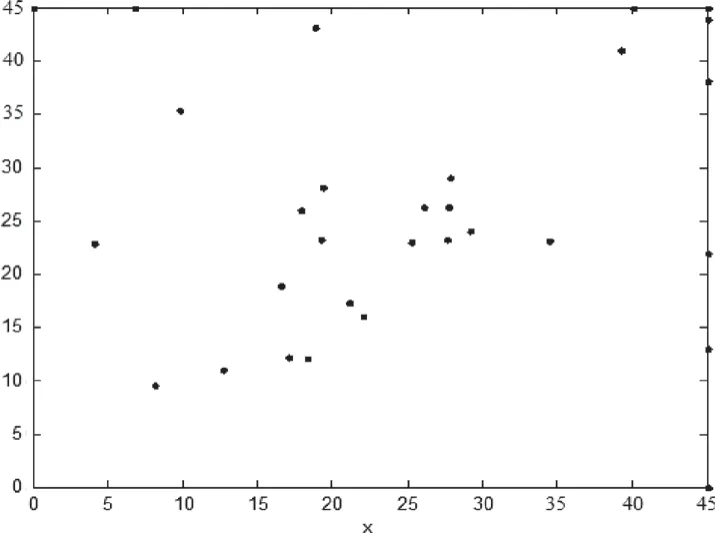
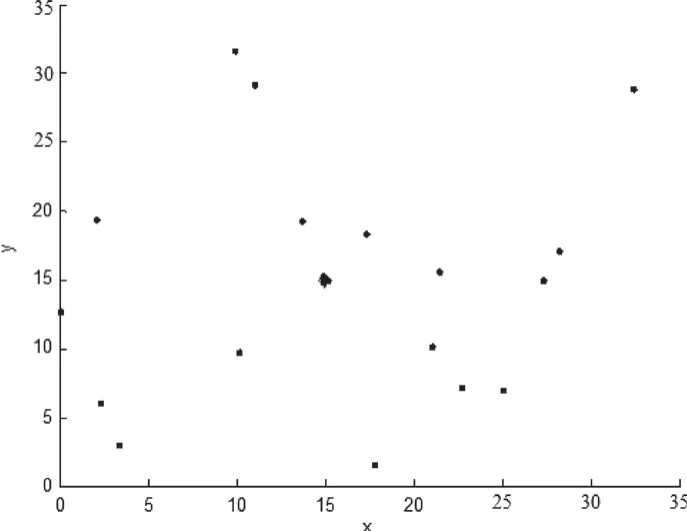
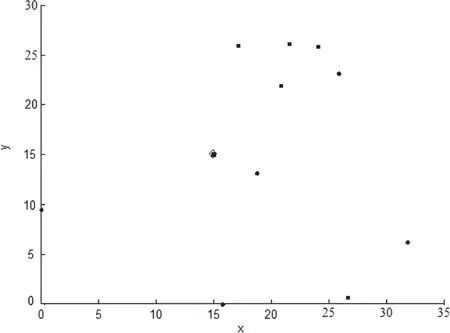
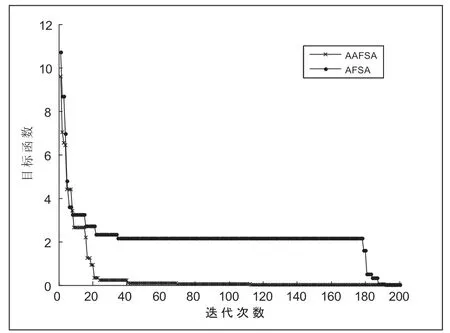
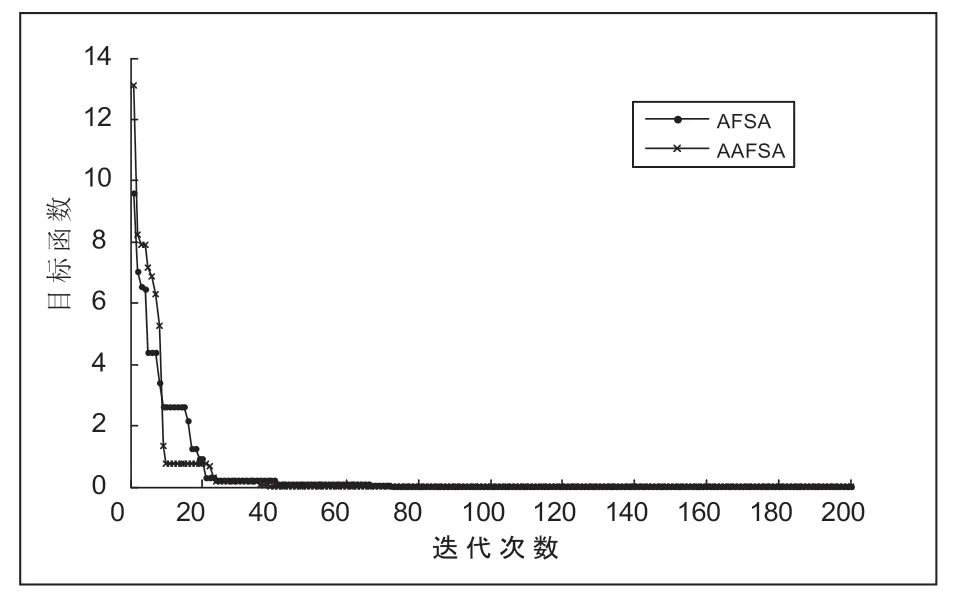
Xi記為人工魚i當前狀態,在其視野范圍內隨機選取一個狀態記為Xj,假設求取極大值,則Yi>Yj(假設求極小值為Yi (2)聚群行為 Xi記為人工魚i當前狀態,此探索領域內(dij (3)追尾行為 Xi記為人工魚i當前狀態,Yj為當前搜索鄰域內(dij (4)攻擊行為 設Xi為人工魚i當前狀態,Yj為在當前搜索鄰域內(dij (5)隨機行為 就是在人工魚的視野范圍內隨機選取一個狀態后,朝該方向移動的行為。該行為簡單易實現。 (6)公告板 用來記錄最優人工魚的狀態。人工魚經過一系列行為后會將最優的狀態信息記錄在公告板上,即公告板記錄是人工魚的狀態信息。 AAFSA流程圖如圖2所示,首先初始化設置人工魚群的各項參數,包括人工魚的總數,人工魚個體的狀態,步長,視野,嘗試次數,擁擠度因子等。計算每個人工魚狀態的食物濃度并將食物濃度最大的人工魚的狀態記錄到公告板中。根據每個人工魚的各個行為狀態選擇最優的行為作為最終的行為來執行,若符合追尾行為條件則執行追尾行為,否則判斷是否符合聚群行為條件;若滿足聚群行為條件則執行聚群行為,否則判斷是否滿足攻擊行為條件;若滿足攻擊行為條件則執行攻擊行為,否則判斷是否滿足覓食行為條件;若滿足覓食行為條件則執行覓食行為,否則執行隨機行為。將最優行為記錄并更新公告板。若滿足終止條件,即到達最大迭代次數時則停止運算輸出結果,此結果為最優值。若不滿足終止條件,則重新判斷人工魚選擇執行的行為。 圖2 AAFSA流程圖 選取高維多峰函數F1,分別使用人工魚群算法和改進人工魚群算法對其進行參數優化測試,初始狀態下兩種算法的人工魚位置分布相同。如圖3所示。 圖3 人工魚的初始位置 圖4 和圖5分別表示人工魚群算法和改進人工魚群算法最后人工魚的分布情況。圖4中人工魚分布較為分散,而圖5中的人工魚分布相對集中。通過對人工魚最后分布情況的觀察,引入攻擊行為的人工魚群算法的到達最優值的區域的人工魚數量明顯多于人工魚群算法。 圖4 AFSA人工魚的最后分布 圖5 AAFSA人工魚的最后分布 選取另一個高維多峰函數F2,分別利用兩種算法對F1和F2函數進行優化并分析收斂曲線。從收斂曲線對比中可以發現,具有攻擊行為的人工魚群算法在后期的收斂速度和精度都得到了加強。圖6和圖7是兩種算法分別對F1和F2函數優化的收斂曲線比較。 圖6 AFSA和AAFSA收斂曲線比較(F1) 圖7 AFSA和AAFSA收斂曲線比較(F2) 通過實驗仿真可以發現,具有攻擊行為的人工魚群算法在性能方面明顯優于人工魚群算法。在引入了攻擊行為后,改進人工魚群算法的執行時間明顯縮短。因此利用改進人工魚群算法對無極繩絞車控制系統參數進行優化,可以提高采樣數據的精度,提高系統的可靠性和安全性。 本文提出利用具有攻擊行為的人工魚群算法對位置參數進行優化,解決了人工魚群算法尋優存在問題。選取不同的高維多峰函數,分別使用人工魚群算法和改進人工魚群算法對其進行測試。通過實驗對比發現,優化后的參數精度明顯增大,系統的穩定性及抗干擾能力增強。將具有攻擊行為的人工魚群算法應用到無極繩絞車控制系統,系統的參數得到優化,提高參數的精度,能夠有效地保證無極繩絞車井下工作的安全,對煤炭安全生產起到舉足輕重的作用,增強了該控制系統在市場的競爭力。■2.2 算法流程圖
3 系統參數的優化
4 結語
