基于物聯網的分揀機器人故障檢測系統設計
2021-08-23 09:02:06代康,謝凱
計算機測量與控制 2021年8期
代 康,謝 凱
(新疆工程學院 信息工程學院,烏魯木齊 830023)
0 引言
近年來,我國各行各業都在飛速發展,勞動力成本逐漸上漲,但生產需求卻不斷在增加,因此分揀機器人在各行各業中的應用非常廣泛,需求量巨大[1-2]。就目前來看,分揀機器人雖然取得了一定的應用效果,但是在使用過程中存在很多問題,經常會發生各種各樣的故障,為了解決這一問題,相關領域學者提出了人工檢測方式,雖然人工檢測能夠保證檢測過程的實時性,但是檢測過于局限,由于工作人員經驗不足,有許多故障都難以確定,由此可見,人工檢測分揀機器人的故障狀態已然不能滿足工廠的需求[3-4]。
物聯網能夠通過不同的傳感器與識別技術采集、監控、連接、互動各類信息,利用不同的網絡,完成物、物與人之間的廣泛連接。從而實現對物體和信息的智能管理。相比于互聯網和傳統電信網,物聯網能夠更好地將普通物理對象連接到一起[5]。
基于上述原因,本文設計了基于物聯網的分揀機器人故障檢測系統,利用物聯網技術對分揀機器人實時監控,并在發生故障時迅速上報故障,提升分揀機器人的工作效率,節省人工成本。分揀機器人的工作環境大多比較惡劣,因此,針對充滿灰塵和其他漂浮物和噪聲的環境,本文使用改進的Canny技術對檢測圖像進行預處理,并使用邊緣圖像信息提取來最大程度地減少環境對圖像質量的影響,從而實現分揀機器人故障更準確地檢測。本文設計的基于物聯網的分揀機器人故障檢測系統,可以顯著提高工作中分揀機器人的故障檢測效率,提高行業的工作效率和系統靈活性。
1 基于物聯網的分揀機器人故障檢測系統整體架構設計
分揀機器人故障檢測系統由分揀機器人、中樞神經網絡和采集終端三部分組成[6-7]。基于物聯網的分揀機器人故障檢測系統整體架構如圖1所示。
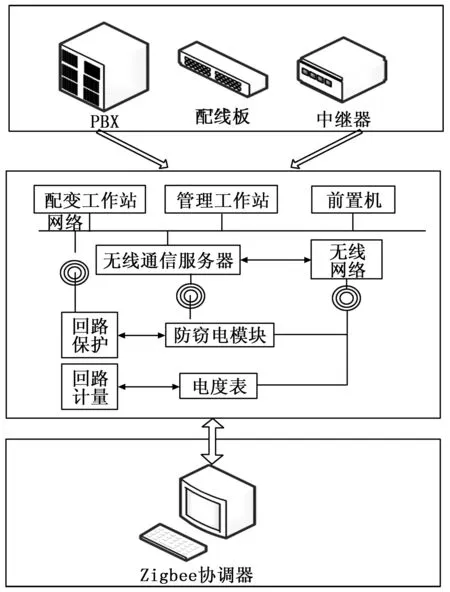
圖1 基于物聯網的分揀機器人故障檢測系統整體架構
圖1所示的系統以Zigbee壓力傳感系統為核心,通過信息標定、信息采集、特征提取來完成故障識別的目的。在分揀機器人上放置多個Zigbee壓力傳感器,當頂板壓力異常時,便自動驅動節點上的高亮度紅色LED燈,同時將故障數據上傳至上位機[8]。與此同時,相機會立即對故障部位進行拍照,通過圖像預處理以及改進后的Canny算子算法對圖像進行信息的采集以及特征提取,最后上傳至上位機,進行故障部位的識別[9]。
機械零件分揀生產線上的工作繁重。如果使用手動分類,不僅操作效率降低,而且成本較高。為此本文分揀機器人在機械零件分揀工作中的常見故障,主要有主軸故障、腕軸故障、熱繼電器故障、減速齒輪故障、電機故障及剎車線故障。
利用物聯網將分揀機器人與故障檢測系統相連接,實時采集機器人故障信息,提取故障特征并對其進行分類識別,獲得分揀機器人故障檢測結果。
2 基于物聯網的分揀機器人故障檢測系統硬件設計
本文研究基于物聯網的分揀機器人故障檢測系統的總體架構由分揀機器人、采集器、控制器組成,系統硬件結構如圖2所示。
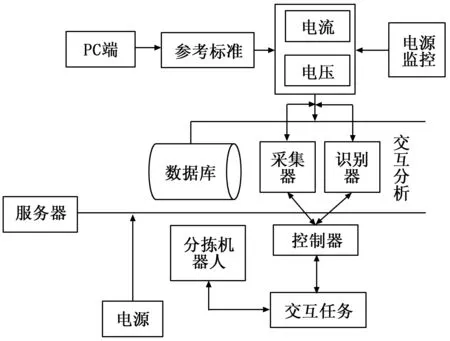
圖2 基于物聯網的分揀機器人故障檢測系統硬件結構
2.1 分揀機器人
分揀機器人整體架構為滑輪式機器人載體,機器人工全鋁合金結構,通過雙輪電機定位保證了分揀機器人操作的精確度,分揀機器人的控制核心采用嵌入式八核控制系統,主機頻率為1 700 MHz,并且支持最新的Windos操作系統[10-11]。分揀機器人如圖3所示。

圖3 分揀機器人示意圖
圖3所示的分揀機器人中預裝了Linuh Debain嵌入式系統,編程語言使用了高效的Python語言,在嵌入式控制系統板引入集成視覺模塊,視頻檢測選用羅技1000W像素C890相機。分揀機器人的地圖導航系統采用PSJANDH公司的紅外激光測距儀,濕度與溫度傳感器采用DEKLL傳感器[12]。
2.2 采集器設計
本文選用了基于物聯網技術的Zigbee壓力傳感技術,Zigbee采集器主要由XBEE控制模塊、壓力傳感器以及高亮度LED燈組成,將Zigbee壓力傳感器采集的信息通過無線通信的方式以協議的形式發送到上位機中,通過串聯使用AT命令集的方式設置模塊參數,并通過串聯接口完成數據傳輸過程,壓力傳感器采用遼寧力敏公司的SKN8277阻式壓力傳感器[13]。采集器結構如圖4所示。
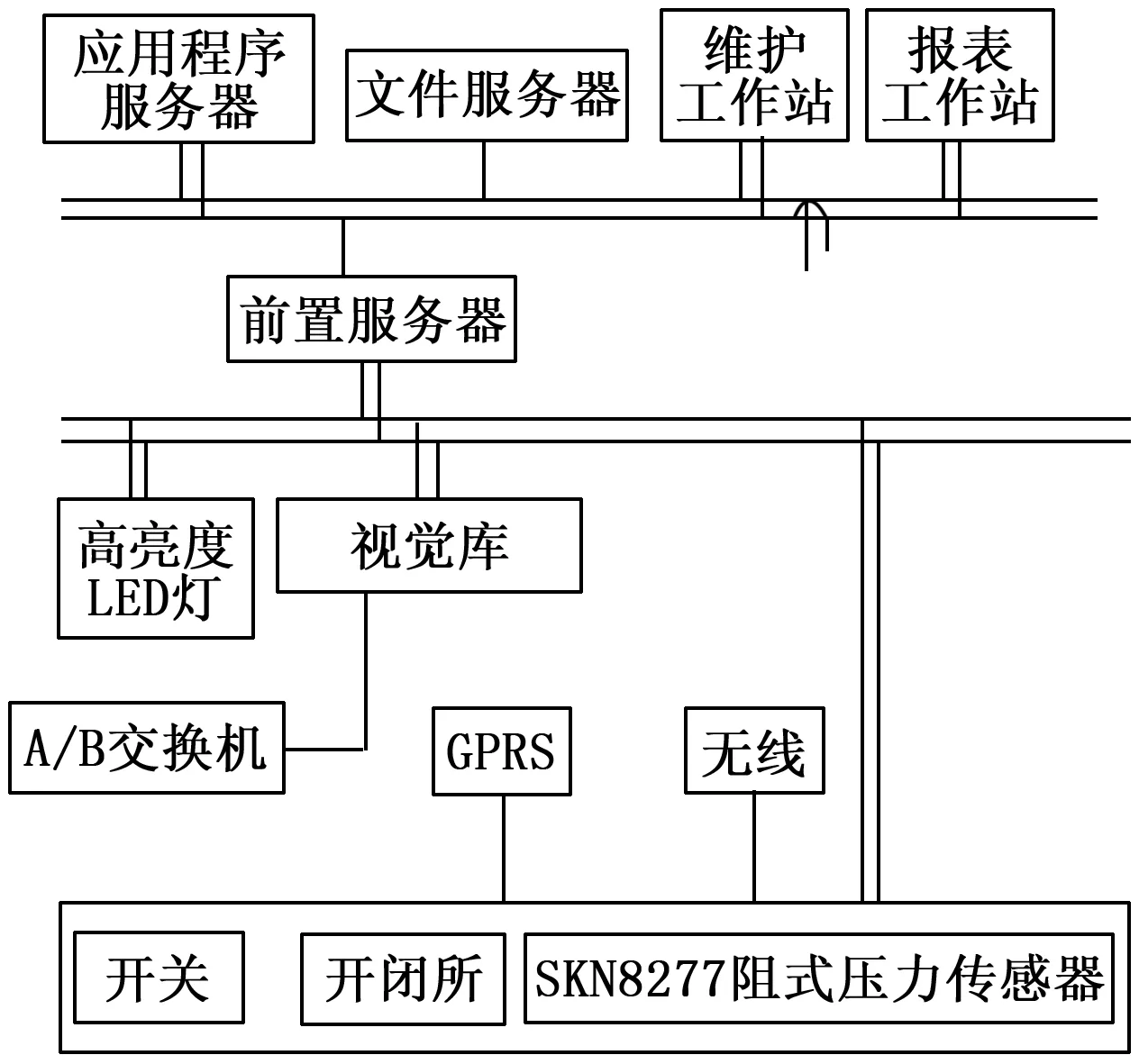
圖4 采集器結構
如圖4所示,采集器中存在一個視覺庫,在便捷Python編程包中,在應用同一算法的情況下,在識別到LED高亮度紅燈后,視覺庫立即進行特征檢測以及濾波識別,控制相機對故障區域進行拍照,采集到的圖像傳入控制器,由控制器上交給上位機進行識別。
2.3 控制器設計
控制器采用中控端設計方式,使用Lsjandu軟件進行編程,由XBEE模塊以及分揀中控機、Lsjandu控制軟件組成。XBEE模塊負責數據之間的傳遞,協調分揀中控機接收各個傳感器采集的信息后,通過STMP3550芯片把Zigbee串連接口數據轉化為USB數據發送到上位機中[14]。利用STMP3550芯片設計控制器,控制器原理如圖5所示。
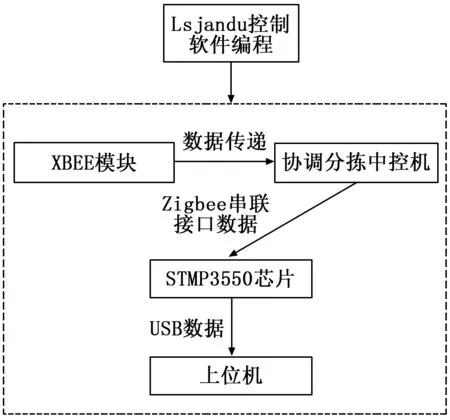
圖5 控制器原理框圖
圖5為控制器的原理圖,將控制器一端連接采集器,一端連接物聯網軟件,實現采集數據的傳輸,并接收軟件得到的故障檢測信息,實現故障檢測控制。
3 基于物聯網的分揀機器人故障檢測系統軟件設計
在建立系統硬件結構后,設計軟件流程。如何將物聯網與故障檢測信息連接在一起是文章需解決的難點。利用圖1中的物聯網實現信息交互和通信,從而完成故障檢測。本文設計的檢測軟件主要通過信息標定、信息采集、特征提取、故障識別4部分組成,基于物聯網的分揀機器人故障檢測系統軟件工作流程如圖6所示。
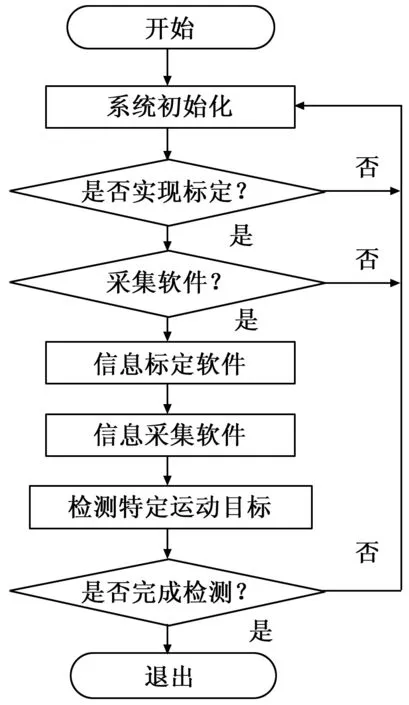
圖6 基于物聯網的分揀機器人故障檢測系統軟件流程
3.1 信息標定
為了獲取精確的分揀機器人故障信息,本文對信息進行標定處理,通過Zigbee壓力傳感器中的XBEE收集故障信息,確定故障信息后,自標定信息軟件ZKHY便會立即對故障信息進行標定,同時上傳到上位機中,進而快速收集到故障信息定位。
通過Zigbee壓力傳感器對分揀機器人故障信息進行標定,能夠縮短特征提取耗時,提升故障識別的準確率。
3.2 信息采集
本文提出的基于物聯網的分揀機器人故障檢測系統的最終任務是將發生故障的分揀機器人的位置信息以及種類信息傳遞給機器人控制系統,因此信息的采集尤其重要,本文采用圖像采集方式來對故障信息進行采集。
圖像采集就是將數字圖像數據采集到計算機中的過程,本文所采用的是用羅技1 000 W像素C890相機,利用等時間間隔觸發的方式進行故障信息的圖像采集,在發生故障時便可迅速對分揀機器人故障位置進行拍照采集。
由于分揀工作中大多環境狀態差,鏡頭會受到環境中灰塵、噪音的影響,因此,還需要對圖像進行預處理,以此減少后續算法的復雜度,提高計算機的運行效率。預處理是圖像自動識別系統中必不可少的一步,它直接影響到后續特征提取以及故障識別的效果,本系統中的圖像預處理的目的就是去除圖像中的噪聲以及灰塵,以此得到清晰的圖像,以便后續對圖像進行特征提取以及故障識別中獲得正確的圖像特征以及正確的故障信息。
3.3 特征提取
在完成信息采集后,進行特征提取,邊緣信息的提取效果直接關系到故障識別效果,因此本文采用邊緣信息作為圖像的故障信息特征進行提取[15]。
本文選用的邊緣圖像信息提取方法為基于物聯網的Canny算子算法,Canny算子算法擁有其他算法無法達到的高檢測精確度以及良好的抗噪音效果,傳統的Canny算法采用了高斯的濾波器,因此存在閾值分割的共性問題,高斯濾波器無法解決閾值的自適應性低這一問題,內部平滑參數無法與閾值進行兼顧[16-18],因此,本文在傳統的Canny算法上進行了改進,通過統計學理論來分析圖像的灰度分布情況,進而大致判斷出當前的區域信息,若處于圖像邊緣附近,則可將邊緣點內的臨近灰度值看作為像素點的灰度值,并可代替原灰度值,若發現圖像變化較為平緩的區域[19-20],則可使用高斯濾波器來對圖像的噪聲進行減弱處理,本文使用此方式來代替傳統Canny算子中的高斯濾波器,可以很好地解決傳統方法存在的不足,更好更準確連接故障圖像邊緣。提取故障特征。
3.4 故障識別
在提取圖像特征后,需要對其進行分類識別,識別出故障問題,此過程的實質便是將提取到的圖像特征向量映射到類型空間之中,以此獲得識別分類的結果,因此,結合本文設計的基于物聯網的分揀機器人故障檢測系統,本文采用了相似模板匹配的方式來對特征進行判別,尋找到易于識別與區分的特征,進而根據相似模板板頂相似度來確定故障的原因,完成故障識別。
4 實驗結果與分析
4.1 實驗方法
為了驗證本文設計的基于物聯網的分揀機器人故障檢測系統的有效性,與傳統故障檢測系統進行實驗對比,實驗在Matlab仿真平臺進行,首先設定實驗參數,如表1所示。
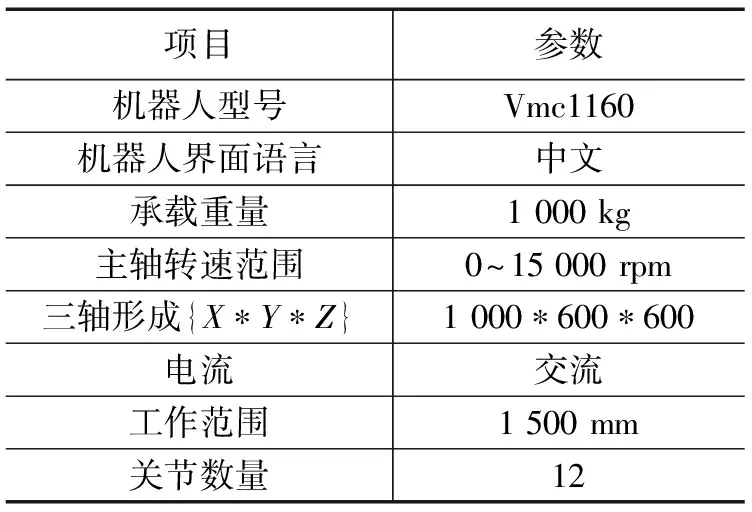
表1 實驗參數
根據上述實驗參數,選取本文提出的基于物聯網的分揀機器人故障檢測系統與傳統的基于分級特征提取的故障檢測系統以及基于機器視覺的工業機器人智能分揀系統進行對比實驗。
4.2 實驗步驟
分別設置分揀機器人的6種故障原因:主軸故障、腕軸故障、熱繼電器故障、減速齒輪故障、電機故障及剎車線故障。采用上述3種系統測試故障,得到不同方法的檢測結果,并測試對各個故障檢測所耗費的時間,得到實驗結果。
4.3 結果分析
將3個系統同時對多個故障分揀機器人進行檢測,檢測結果如表2所示。
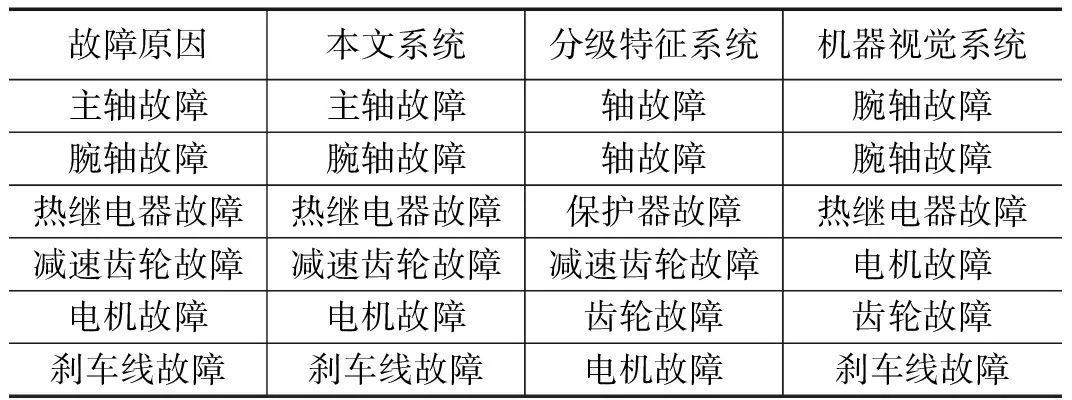
表2 故障檢測結果
如表2所示,本文共選擇了6種不同類型的故障進行實驗,基于物聯網的分揀機器人故障檢測系統在6次檢驗中都準確地檢測出故障原因,基于分級特征提取的故障檢測系統在6次檢驗中僅有一次檢測出故障原因,基于機器視覺的工業機器人智能分揀系統有3次準確檢測出故障原因,由此可見,本文提出的系統對于故障的檢測準確性更高。
故障檢測時間如表3所示。
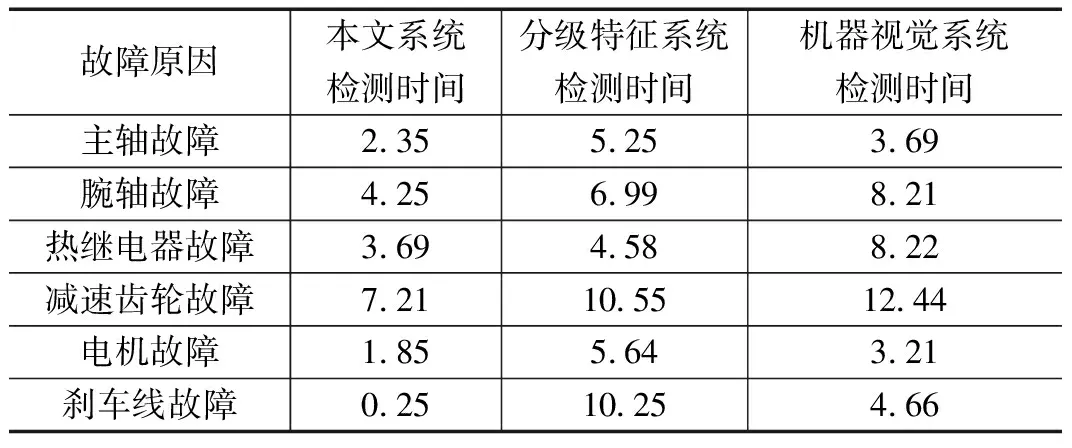
表3 故障檢測時間實驗結果 min
如表3所示,在檢測時間上,本文研究的檢測系統耗時平均值為3.27 min,始終小于傳統系統。由于傳統系統檢測準確率較低,所以需要耗費更長的時間進行信息檢測,而本文系統內部的采集器和控制器同時工作,有效提高檢測準確性,縮短檢測時間。
綜上所述,本文提出的基于物聯網的分揀機器人故障檢測系統可以很好地解決當今使用分揀機器人的工廠存在的故障無法及時識別與處理的問題,也為分揀機器人故障檢測系統以后的開發提供了一定程度的參考,基于物聯網的分揀機器人故障檢測系統擁有的高效率優勢會使得該系統越來越廣泛地應用于其領域。
5 結束語
為了節省人工成本,提高分揀機器人的工作效率,本文設計了基于物聯網的分揀機器人故障檢測系統,硬件設計了系統電路以及采集器、控制器,結合故障信息標定、故障信息采集、故障信息特征提取來完成最后的故障識別的目的。實驗表明,本文設計的基于物聯網的分揀機器人故障檢測系統可顯著提升對于工作中的分揀機器人的故障檢測效率,提升了該行業的工作效率與系統柔性。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2019年15期)2019-08-27 01:12:00
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
