基于RFID技術的四旋翼無人機軌跡跟蹤控制系統設計
2021-08-23 09:08:48郭志帥
計算機測量與控制 2021年8期
關鍵詞:信號
高 晶,郭志帥
(1.沈陽工學院 信息與控制學院,沈陽 113122;2.東軟集團股份有限公司,沈陽 113122)
0 引言
RFID(radio frequency identification)技術也叫射頻識別,其應用原理可解釋為標簽與閱讀器之間的非接觸型數據通信關系,一般情況下,可在短時間內實現對待測目標的精準識別。作為自動識別技術的關鍵組成環節,RFID技術可借助無線射頻波提取非接觸型雙向通信數據,再利用射頻卡或電子標簽對媒體信息進行讀寫處理,從而實現待識別目標與數據對象間的執行指令交換[1-2]。該項處理手段通過信息交換與信息存儲技術,建立無線射頻主機與數據訪問中心間的物理連接關系,然后再通過數據庫系統,完成電子標簽信息的通信與讀寫。根據通信距離的不同,可將RFID技術分為遠場、近場兩種處理形式,且由于負載調制與反向散射調制作用的存在,電子標簽之間數據交換行為也會出現明顯不同的反應狀態。
四旋翼無人機是以老鷹為設計靈感的新型飛行器元件,具有抓力強、速度快、重量輕等多項應用特點。在無人監管情況下,隨著四旋翼主機飛行距離的延長,飛行器結構體所具備的避障行進能力會出現明顯下降的變化趨勢。傳統機器視覺型控制系統借助交叉視場解決機體與障礙物之間的避障問題,再通過目標參考點遞推的方式,確定障礙物結構體與飛行器設備之間的實際距離。但此系統很難對無人機滾轉角進行有效控制,易造成SSI避障行進指標數值的持續下降。為解決此問題,引入RFID技術,在內環姿態控制器、數據通信鏈路等多個硬件設備結構體的支持下,設計一種新型的四旋翼無人機軌跡跟蹤控制系統,并通過設計對比實驗的方式,突出該系統的實際應用價值。
1 RFID標簽識別技術
RFID標簽識別技術由工作頻段定義、控制信號調制、標簽識別協議連接3個流程共同組成,具體研究操作方法如下。
1.1 RFID的工作頻段
RFID標簽識別的過程主要包括軌跡信息的發送、傳輸、接收3個流程。在RFID工作頻段保持不變的情況下,標簽識別協議和數據標簽的待傳輸信息首先可被調制到載波頻段之上,再通過無線型空間信道將其發送出去。對于RFID工作頻段來說,標簽識別協議與數據標簽之間的通信主要包含3個基本功能塊結構,按照從標簽識別協議到數據標簽的信息傳輸方向,它們可總結為標簽識別協議中的無人機軌跡數字信號(如待處理信號、編碼信號、基帶信號等)、跟蹤波調制器(也叫回路載波信號調制)、軌跡跟蹤信號傳輸介質(也叫控制波傳輸信道)以及數據標簽中的所有信號譯碼行為(信號處理行為)和解調器設備[3-4]。此外,RFID工作頻段的軌跡跟蹤信號通信還包括標簽識別協議和數據標簽之間的兩種組合方式以及這兩種組合與無人機軌跡跟蹤信號之間的工作頻段關系。與RFID標簽識別相關的主要工作頻段有:微波、超高頻、高頻、低頻。其中,微波與超高頻主要被應用于無人機跟蹤控制信號的遠場通信,而低頻與高頻主要被應用于無人機跟蹤控制信號的近場通信。RFID標簽工作頻段及其主要特征如表1所示。
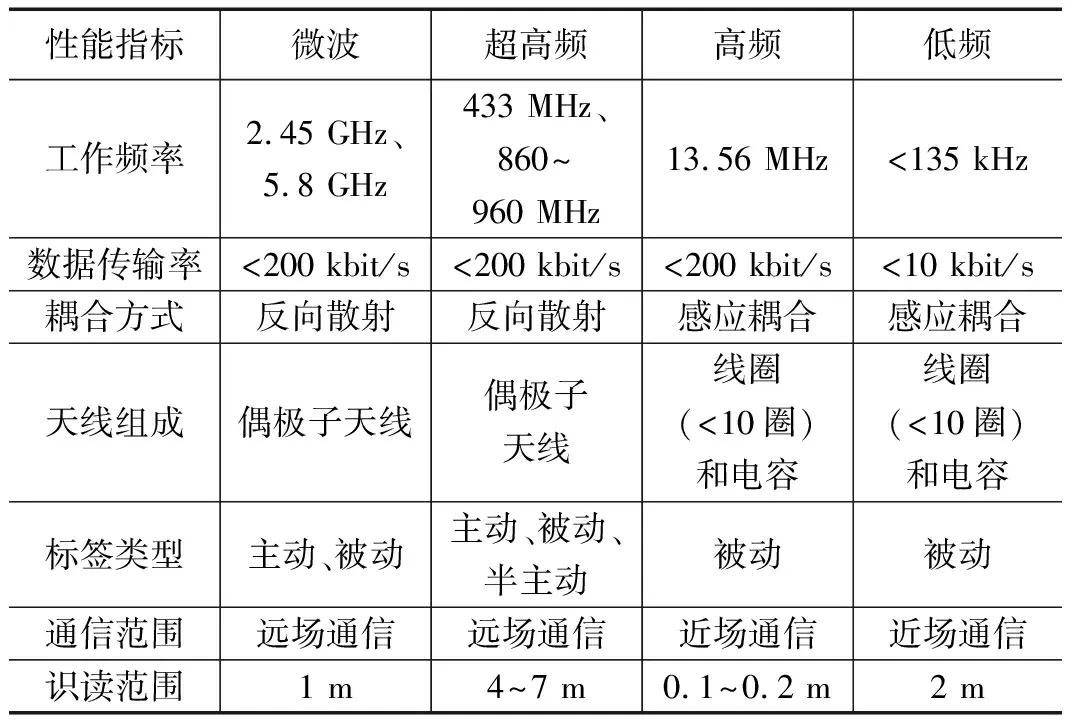
表1 RFID標簽工作頻段及其主要特征
1.2 RFID控制信號調制
RFID控制信號調制也叫對無人機軌跡跟蹤信號源的變換處理,其目的在于使源信號數據以較低衰減頻率的方式在RFID信道中傳輸。通常來說,無人機軌跡跟蹤信號源的信息(也叫信源)包含有大量直流形式的低頻率數據分量(基帶控制信號)。基帶控制信號在RFID信道中直接傳輸極易造成無人機軌跡數據信息出現嚴重衰減行為,從而呈現完全失真狀態[5]。因此,基帶控制信號往往不能被用于直接傳輸,而是需要將其轉換為一個低傳輸損耗形式的信號主體再進行傳輸。對于RFID工作頻段中二進制信號的調制手段有:相移鍵控法、頻移鍵控法、幅移鍵控法3種。
1)相移鍵控:對不同基帶控制信號采用不同的控制載波相位。該項技術手段的抗信號干擾性極為優良,此外,控制載波相位的變化還可以對無人機軌跡跟蹤信號源起到同步調制的作用。
2)頻移鍵控:對不同基帶控制信號采用不同的控制載波頻率。該項技術手段的抗信號干擾能力相對較為不錯,但所需占用的帶寬量數值極大。
3)幅移鍵控:基帶控制信號載波的幅度可根據無人機軌跡跟蹤信號源的不同而選取不同的物理數值,控制幅移鍵控的實現流程相對較為簡單,且極易受到無人機軌跡增益變化行為的影響,因此實際調制效果并不十分理想[6]。
1.3 標簽識別協議
RFID標簽識別環境下的經典連接協議包含純ALOHA協議、幀時隙ALOHA協議、EPC C1G2協議3種。其中,純ALOHA協議的基本思想是無人機軌跡跟蹤信號一旦準備好要發送的控制標簽ID信息后,就立即開始向數據通信鏈路發送。一旦出現碰撞行為,控制標簽就停止ID信息的發送行為,并隨機等待下一個單位控制時間,再繼續重新發送控制標簽ID信息的操作[7]。幀時隙ALOHA協議的主要思想是將所有無人機軌跡跟蹤信號時隙組合成一個傳輸幀結構,RFID標簽只能隨機在0-n內選擇一個時隙參量與微型四旋翼軌跡控制器進行通信,這種協議的時隙存在3種基本傳輸情況:無標簽響應、一個標簽響應、多個標簽響應[8]。EPC C1G2協議可同時對多個無人機軌跡跟蹤信號進行應答,在RFID標簽識別時長保持不變的情況下,該協議可自行調整控制標簽ID信息的存儲長度值,從而使幀長調整反應比數值相對較大。
2 四旋翼無人機軌跡跟蹤控制系統硬件設計
在RFID標簽識別技術的支持下,按照微型四旋翼軌跡控制器、內環姿態控制器、數據通信鏈路、時控跟蹤電路連接的設計流程,完成四旋翼無人機軌跡跟蹤控制系統硬件平臺的搭建。
2.1 微型四旋翼軌跡控制器
根據四旋翼無人機的飛行動力學模型可以看出,該結構是高耦合狀態的非線性欠驅動模型,在空間環境中具有六種不同的自由度輸出狀態,但卻只能同時收到4個與軌跡跟蹤信號相關的控制輸入量。近年來越來越多的復雜控制算法被應用于四旋翼無人機模型之中,但絕大多數算法的核心控制思想依然是利用無人機的自主輸出行為對軌跡跟蹤信號進行反饋調節。在RFID技術的支持下,微型四旋翼軌跡控制器主要有全驅動反饋、欠驅動反饋兩種執行模式[9-10]。微型四旋翼軌跡控制器結構在實際控制過程中,需要匹配更加復雜的邏輯算法思想。從全驅動反饋模式結構可以看出,控制模式只能對無人機的航向與位置偏差進行修正,但卻忽視了在姿態與速度方面的控制處理;欠驅動反饋模式結構能夠使四旋翼無人機始終保持相對良好的航向與位置收斂性,但卻無法對飛行姿態進行定向化控制,易導致飛行器結構體失去控制。
2.2 內環姿態控制器
內環姿態控制器可在RFID標簽識別技術的作用下,實現與微型四旋翼軌跡控制器的對應連接,且隨著無人機飛行時間的延長,這種連接形式的物理穩定程度也會逐漸增強,直至能夠與軌跡跟蹤控制指令的實際執行需求完全匹配。整個控制器元件由內部應用芯片和外部四旋翼內環共同組成,前者負責記錄無人機軌跡路徑的實際變動行為,后者則根據前者所記錄的具體數據,而進行相應的行為變動[11-12]。通常情況下,內環姿態控制器只包含4個相互獨立的半環狀旋翼結構,且為使無人機設備具有更強的飛行能力,后部旋翼的覆蓋面積必須大于前部旋翼。當無人機飛行器遭遇強氣流影響時,風力首先作用于前部旋翼結構,由于前部半環周長相對較短,氣體在此區間內的流動速度也相對較慢;由于后部半環周長相對較長,當風力作用于后部旋翼結構時,氣體流動速度相對較快;此時前、后半環之間的氣體流速差會推動四旋翼無人機向前飛行。
2.3 數據通信鏈路
數據通信鏈路是空中四旋翼無人機飛行器與地面航跡規劃主機間進行控制數據交換的通道,作為兩個元件設備之間的紐帶,通常以9XTend OEMRF無線數傳模塊作為核心搭建設備。9XTend OEMRF無線數傳模塊具有多個串行接口通道,其中3~5 V的CMOS DART串行接口只能占據原有的RPSMA型天線接口,在內環姿態控制器接收能力保持不變的情況下,該類型接口的應用能力越強,數據通信鏈路所具備的無人機軌跡跟蹤信號傳輸能力也就越強[13]。當內部調制解調器中被加入了RFID標簽識別技術后,數據通信鏈路能夠有效解決因無人機軌跡跟蹤信號射頻干擾而產生的數據信息波動問題,因此在超長飛行距離下,微型四旋翼軌跡控制器依然能夠較好協調無人機設備的實際飛行能力。一般情況下,9XTend OEMRF無線數傳模塊的接收靈敏度可達-110 dBm[14]。在四旋翼無人機飛行距離小于9 000 m時,軌跡跟蹤控制信號數據的吞吐量只能達到230 kbps;而當四旋翼無人機的飛行距離大于9 000 m時,軌跡跟蹤控制信號數據的傳輸率會在短時間內超過115.2 kbps,且隨著待傳輸數據總量的增大,整個數據鏈路始終可維持原有的多分支網絡拓撲型工作模式。
2.4 時控跟蹤電路
時控跟蹤電路由信號跟蹤子電路、信號放大電路兩部分共同組成。其中,信號跟蹤子電路存在于四旋翼無人機軌跡跟蹤控制系統的Fin端與Fout端之間,由電流偏置電機、控制信號偏置電機等多個物理結構共同組成。信號跟蹤子電路結構如圖1所示。

圖1 信號跟蹤子電路結構
通常情況下,四旋翼無人機軌跡跟蹤控制信號包含ET1、ET2兩個傳輸部分,前者可在電流偏置電機的作用下,對無人機設備的飛行狀態進行小幅度調試,再將其暫時存儲于C1電阻元件之中[15-16];后者可直接接收控制信號偏置電機中的傳輸電子量,一方面調取C1電阻中的電子數據信息,另一方面將無人機軌跡跟蹤控制信號整合成既定的傳輸應用形式。
信號放大電路外接一個獨立的無人機天線結構,可在信號調制器元件的作用下,實現對低頻放大器元件、高頻放大器元件連接行為的同步協調,再通過正交調制器與變頻調制器,完成對四旋翼無人機軌跡跟蹤控制信號的生產與轉換處理。信號放大電路結構如圖2所示。
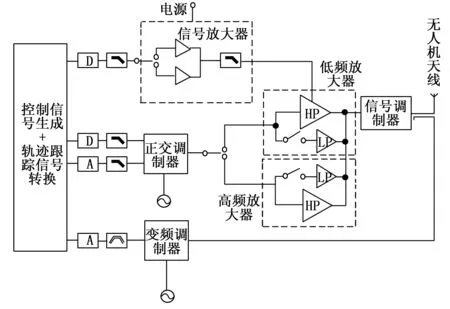
圖2 信號放大電路結構
正交調制器、變頻調制器存在于時控跟蹤電路信號放大子電路的中部,通常可與D主機、A主機直接相連[17-18]。D主機能夠記錄四旋翼無人機設備的實際軌跡變動行為,并可根據其中既定跟蹤節點的連接形式,判定信號放大器設備所處的現有執行狀態。A主機能夠分析變頻調制器中四旋翼無人機軌跡跟蹤控制信號的連接狀態,并可按照既定應用形式對其進行一定程度的調制處理。
3 四旋翼無人機軌跡跟蹤控制系統軟件設計
以硬件平臺作為應用元件支持,在辨識動力系統參數的同時,確定軌跡姿態控制的具體規律標準,兩相結合,完成基于RFID技術的四旋翼無人機軌跡跟蹤控制系統軟件設計。
3.1 動力系統參數辨識
四旋翼無人機軌跡跟蹤控制系統的參數辨識中,最重要的就是針對升力系數的辨識處理,因為對于無人機這類完全依靠螺旋槳升力作用的飛行器結構體而言,能否準確擬合由控制量引起的反扭力矩及升力力矩,是確定油門響應控制量及期望輸出控制量的最主要條件[19-20]。對上文中定義的所有升力系數進行辨識,四旋翼無人機動力系統辨識試驗臺如圖3所示。
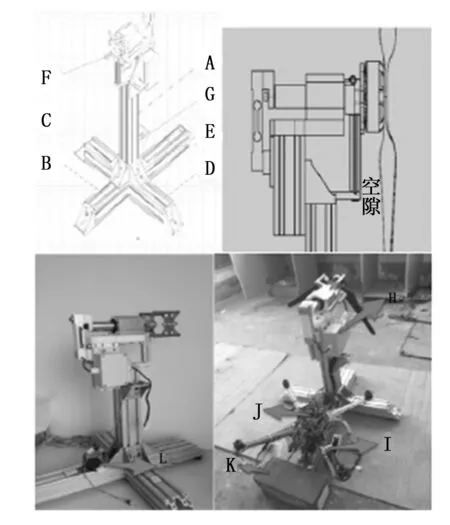
圖3 四旋翼無人機動力系統辨識試驗臺
四旋翼無人機動力系統辨識試驗臺具體部件功能如表2所示。

表2 四旋翼無人機動力系統參數辨識結構
3.2 軌跡姿態控制規律
考慮到四旋翼無人機軌跡姿態控制算法的可實現性及在一定范圍內的電量載荷具有變化魯棒性,選用基于串級RFID技術的控制方法。串級RFID技術控制結構以角度環控制作為第一級控制規律、以內環角速度控制環作為第二級控制規律,相較于傳統機器視覺反饋回路中的PID控制結構,串級RFID技術控制結構具有參數整定時間快、超調量小、響應時間快等多項特點[21]。在反步積分控制法則的支持下,串級RFID技術對于被控系統模型始終保持較高的適應性,可在不接受模型精準度條件的同時,將模型參數引起影響行為控制到最小[22]。綜上,本次研究使用更為成熟的改進RFID技術控制方法,試驗效果良好。設β代表已選定的四旋翼無人機軌跡跟蹤系數,D代表改進RFID技術的實際控制作用權限,K代表單位時間內的軌跡跟蹤控制指令輸出量,聯立上述物理量,可將軌跡姿態控制規律定義為:
(1)
式中,f代表四旋翼無人機在既定軌跡區間內的可控飛行向量,λ代表與角度環控制律相關的串行控制系數,w1代表第一級軌跡跟蹤信號的輸出控制量[23],w2代表第二級軌跡跟蹤信號的輸出控制量,Uβ代表軌跡區間內的飛行姿態控制系數。四旋翼無人機軌跡跟蹤控制系統軟件流程如圖4所示。

圖4 四旋翼無人機軌跡跟蹤控制系統軟件流程
根據圖4可知,通過辨識反扭力矩及升力力矩,采用串級RFID技術,定義軌跡姿態控制的具體規律標準,將角度環控制作為第一級控制規律,將內環角速度控制作為第二級控制規律,確保被控系統模型始終保持較高的適應性,從而減小油門響應控制量及期望輸出控制量引起的影響,實現四旋翼無人機軌跡跟蹤控制。綜上所述,在串級RFID技術的支持下,通過搭建四旋翼無人機軌跡跟蹤控制系統軟、硬件執行條件,實現四旋翼無人機軌跡跟蹤控制系統設計。
4 實驗分析
在本實驗中主要驗證四旋翼無人機實時航跡規劃能力及跟蹤控制主機與地面基站間的信息交互能力。在實際的航跡規劃環境中,障礙物結構包括電力塔、高壓線、建筑物等。實驗組飛行器搭載基于RFID技術的軌跡跟蹤控制系統,對照組飛行器搭載機器視覺型控制系統。
由于地形相對較為平緩,為減少計算量在實驗中假設地面環境均為平面約束。一般情況下,可將建筑物和電力塔抽象成規則的矩形,將高壓線抽象成線形障礙物,再統一進行航行軌跡的規劃約束,將完成抽象的障礙物數據加載到地面站軟件中,如圖5所示。

圖5 抽象處理后的無人機飛行軌跡
已知SSI避障行進指標能夠反映四旋翼無人機飛行器主機所具備的避障行進能力,一般情況下,指標數值越大,飛行器主機所具備的避障行進能力也就越強,反之則越弱。SSI避障行進指標對比結果如圖6所示。

圖6 SSI避障行進指標對比圖
分析圖6可知,隨著實驗時間的延長,對照組SSI避障行進指標與理想化指標的數值差異水平相對較小,在第20~25 min的實驗時間內,達到最大數值量,約為38%。實驗組SSI避障行進指標在實驗前期的數值水平相對較高,實驗后期的數值水平雖有一定程度的下降,但對整體數值變化狀態的影響能力相對較小,全局最大值達到了79%,與對照組極值相比,上升了38%。
分析表3可知,理想狀態下四旋翼無人機滾轉角理想值始終保持不斷上升的變化趨勢,而實驗組四旋翼無人機滾轉角的變化幅度相對較小,四旋翼無人機滾轉角平均數值為85°,整個實驗過程中的平均數值也始終低于理想均值水平,對照組四旋翼無人機滾轉角則始終保持大幅上升的變化趨勢,全局最大值與實驗組極值相比,上升了105°。
表3記錄了實驗組、對照組四旋翼無人機滾轉角數值的實際變化情況。
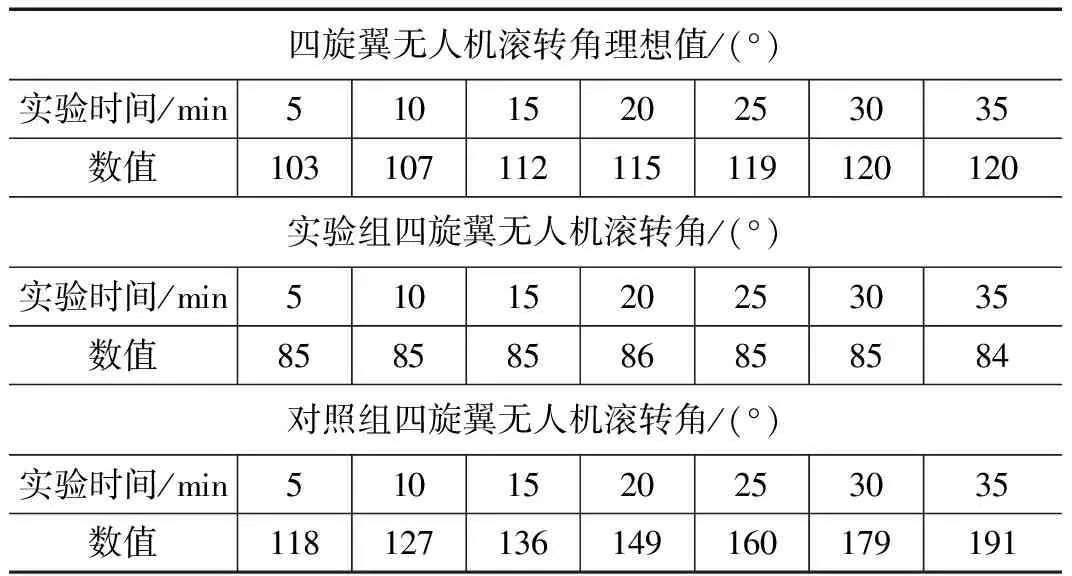
表3 四旋翼無人機滾轉角數值對比表
綜上可知,隨著基于RFID技術軌跡跟蹤控制系統的應用,四旋翼無人機飛行器的滾轉角變化能力得到有效控制,而SSI避障行進指標的數值水平卻得到良好抑制,可大幅增強無人監管情況下飛行器主機所具備的避障行進能力。
5 結束語
在RFID技術的作用下,四旋翼無人機軌跡跟蹤控制系統聯合內環姿態控制器、時控跟蹤電路等多個硬件執行設備,在辨識動力系統參數的同時,可對軌跡姿態控制規律進行精準定義。從SSI避障行進指標、無人機滾轉角兩項參量來看,能夠促進四旋翼無人機自主飛行能力的大幅增強。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
