基于數傳電臺的靶彈測控系統設計
2021-08-23 09:02:16吳彥卓
計算機測量與控制 2021年8期
王 剛,齊 躍,吳彥卓
(1.中國人民解放軍91851部隊,遼寧 葫蘆島 125001; 2.中國人民解放軍92941部隊,遼寧 葫蘆島 125001)
0 引言
靶彈用于模擬敵方來襲的導彈,是考核鑒定防空武器防空反導能力的重要靶標[1]。利用退役的飛航式反艦導彈改裝靶彈既節約了導彈退役報廢費用,又節約了防空導彈用靶費用,是一種經濟而有效的靶標開發模式[2-3]。某型靶彈由退役的飛航式反艦導彈改裝而成,該型靶彈在飛行過程中需要將靶彈實時位置信息以及彈載設備工況信息下傳到地面指揮控制系統用于防空武器試驗或訓練過程中的數據判讀與決策,同時需要將地面的安控指令上傳至靶彈用于在靶彈飛行異常情況下控制其實施自毀,因此靶彈改裝過程中需要加裝彈載測控設備。靶彈作為一種消耗性產品,其加裝的測控設備在保證可靠性的基礎上對其低成本、通用化和小型化提出了更高的要求[4]。為靶彈研制專用測控設備,價格昂貴且通用性受到限制[5]。數傳電臺具有技術成熟、采購渠道通暢、效費比較高、開發難度相對較小等優點[6-7],以數傳電臺為核心器件設計通用型測控設備可以有效降低成本[8-9]。本文以數傳電臺為基礎設計一型靶彈測控系統,該測控系統由彈載數傳設備和數傳地面站組成。該測控系統可以實現靶彈飛行過程中重要數據的實時下傳和安控指令上傳,同時可實現4臺地面站接力布站對一枚靶彈進行測控。
在靶彈飛行過程中,由于靶彈飛行距離較遠,受地球曲率的影響,靶彈數傳地面站的測控范圍有限[10-11]。為增加測控范圍,需要在靶彈飛行航跡沿線采用接力布站的方式完成靶彈飛行過程的測控[12],即采用多臺地面站對同一枚靶彈進行測控[13-14]。以往采用多臺地面站測控時為避免地面站上行數據沖突,只有一臺地面站用于發送上行數據[15-16],其他地面站只接收靶彈的下行數據,這限制了靶彈測控系統上行數據的發送能力[17-18],靶彈只能在特定區域內接收地面站的控制指令,無法在全航程內接收地面站安控指令的控制[19-20]。本文采用時分多址的傳輸模式,可使4臺地面站在4個不同的傳輸時隙內上傳安控指令,使靶彈在飛行全航程都能接收地面站的安控指令控制,提高了靶彈測控可靠性和供靶安全性。
1 靶彈測控系統總體設計
靶彈測控系統由彈載數傳設備和數傳地面站組成。彈載數傳設備由數傳天線、高頻饋線、數傳電臺、采編器、電源模塊構成,彈載數傳設備組成框圖見圖 1。數傳電臺、采編器和電源模塊采用分層式結構集成為一個整體,層間用連接器傳輸電信號。電源模塊分別輸出+5 V和+24 V直流電,+5 V為采編器供電,+24 V為數傳電臺供電。彈載數傳設備殼體上用航空接插件與靶彈電纜網連接,用于傳輸電氣信號。彈載數傳設備天線采用倒F型天線,安裝在靶彈設備艙段上側。該天線尺寸較小,對靶彈的氣動性能無影響。彈載數傳設備通過減振器安裝到靶彈設備艙段內,以減小靶彈飛行過程中振動對彈載數傳設備的影響。彈載數傳設備具有數據采集、數據傳輸和安控功能。數據采集功能包括采集彈上32路模擬量、16路開關量、3路數字量信號并將采樣數據按約定的數據幀格式通過RS422串口發送給數傳電臺;數據傳輸功能包括通過數傳電臺將數據發送到地面站,接收地面站發送的安控指令;安控功能包括接收地面站的安控指令后,對安控指令進行判斷并向靶彈飛控系統輸出+27 V安控信號。
圖1 彈載數傳設備組成框圖
數傳地面站集成在一臺便攜式加固計算機內。數傳地面站由數傳天線、高頻饋線、數傳電臺、收發控制器、電源模塊、數據處理計算機,設備機殼及操控面板組成。天線采用鞭狀天線,數傳電臺與彈載數傳設備所選用的電臺型號相同。數傳地面站具有數據接收、發送安控指令、數據處理、存儲與顯示功能,主要完成接收彈載數傳設備的數據并進行數據處理和圖形化顯示,采樣操控面板上安控指令按鈕狀態并通過數傳電臺將安控指令發送給彈載數傳設備。
靶彈測控系統所用數傳電臺選用工業級商用數傳電臺,通過環境篩選試驗使數傳電臺可靠性滿足靶彈測控系統的使用要求。該型數傳電臺為半雙工工作模式,同一時刻只能選擇接收或發送一種工作模式。數傳電臺通過RS422串口與采編器或收發控制器進行通信,數傳電臺數據傳輸率設置為38 400 bps。為滿足彈載數傳設備與數傳地面站之間數據傳輸的實時性要求,靶彈測控系統按周期進行上行和下行數據傳輸,每個傳輸周期為100 ms,一個周期內可以完成一次下行數據傳輸和4次上行數據傳輸。數傳地面站布站如圖 2所示。在靶彈飛行航跡附近可用4臺地面站進行接力測控。彈載數傳設備與4臺數傳地面站之間的數據傳輸時隙如圖 3所示。彈載數傳設備每100 ms的循環周期內向下發送數據135字節,通信協議采用串口通信協議,數據格式為8數據位、1起始位、1停止位,數據傳輸率為38 400 bps。135字節需要的傳送時間為:135×(1+8+1)/38 400=0.035 2 s=35.2 ms。該數傳電臺接收數據與發送數據模式轉換時間小于20 ms,35.2~59 ms之間有23.8 ms用于數傳地面站由數據接收模式轉換為數據發送模式,同時彈載數傳設備由數據發送模式轉換為數據接收模式。59 ms時數傳地面站A可以發送安控指令,安控指令幀長度為5個字節,每次發送安控指令需要5×(1+8+1)/38 400=0.001 3 s=1.3 ms,4臺地面站發安控指令上行數據的時隙分配如圖 3所示,每臺地面站安控指令發送時間間隔為5 ms。75.3 ms時地面站D安控指令發送完畢,75.3~100 ms之間有24.7 ms,該時間段用于數傳地面站和彈載數傳設備收發模式轉換。
圖2 數傳地面站布站示意圖

圖3 數據傳輸時隙分配圖
2 彈載數傳設備采編器硬件及軟件設計
彈載數傳設備采編器由DSP、FPGA、A/D采樣芯片、串口緩存芯片,光MOS型繼電器輸出電路、光耦采樣電路、外部ROM存儲芯片組成。采編器組成框圖見圖4。DSP用于運行采編器程序,外部ROM存儲采編器程序以及安控指令碼。4片8路A/D采樣芯片可完成32路模擬量采樣。4路64位串口緩存芯片用作3路數字量采樣緩存,同時作為與數傳電臺RS422串口通信的緩存。FPGA芯片實現對DSP與各外圍芯片間通信的總線控制。8路光MOS型繼電器輸出電路可以輸出自檢、解鎖、復位、自毀4路+27 V安控信號,16路光耦采樣電路用于靶彈的16路開關量采樣。

圖4 采編器組成框圖
采編器軟件在DSP內運行用于完成采編器上電后初始化,采集32路模擬量和16路開關量數據,通過串口查詢接收彈載衛星定位設備定位信息和數傳電臺收到的安控指令,根據安控指令通過固態繼電器輸出相應的安控指令控制信號。安控指令包括:自檢、解鎖、復位、自毀共4條指令。自檢指令用于檢查傳輸信道是否通暢;解鎖指令是自毀指令的保險,在沒發出解鎖指令時,自毀指令即使發出也不起作用;復位指令是對解鎖指令的恢復;自毀指令在輸出27 V后必須進行自保。彈載數傳設備采編器軟件按100 ms的周期循環運行,軟件流程如圖 5所示。采編器供電后首先進行硬件初始化,將自檢、解鎖、自毀狀態字和自毀指令計數器i置0,查詢接收數傳電臺串口緩存計數器j置0,而后啟動100 ms定時器并進入100 ms循環程序;進入循環程序后首先進行16路開關量和32路模擬量采樣,而后用查詢的方式接收衛星定位設備和數傳電臺的串口數據。接收完數傳電臺的串口數據后即對接收的安控指令數據幀進行解析校驗。程序流程中②到③完成查詢接收數傳電臺串口緩存并對安控指令數據幀進行判斷,若安控指令為自檢指令則將自檢狀態字置1,自毀狀態字不等于1的條件下判斷安控指令是解鎖指令還是復位指令同時根據判斷結果將解鎖狀態字置1或0。程序流程中③到④完成自毀指令計數,在解鎖狀態字為1的條件下若接收的安控指令為自毀指令則自毀指令計數器i自加1;當連續3次收到自毀指令時,將自毀狀態字置1同時輸出27 V的自毀控制信號。連續收到3次安控指令后實施自毀可以降低因數據傳輸錯誤而造成誤自毀的概率。程序流程中④到⑤完成查詢接收數傳電臺串口緩存次數的判斷,每100 ms的循環周期內需查詢數傳電臺串口緩存4次。程序流程中⑤到①完成100 ms計時并發送135字節的下行數據幀而后進入節點①開始下一個循環周期。

圖5 彈載數傳設備采編器軟件流程圖
3 數傳地面站硬件設計
數傳地面站電氣原理如圖 6所示,數傳地面站用交流220 V市電供電,交流220 V轉直流24 V電源模塊輸出24 V直流電壓給數據處理計算機、數傳電臺和收發控制器供電。顯示器、鼠標、鍵盤與數據處理計算機用于接收數傳電臺輸出的靶彈下行數據,包括靶彈實時位置信息以及彈載設備工況信息。數傳電臺串口輸出端以并聯的方式同時給收發控制器和數據處理計算機發送數據,數據處理計算機接收數傳電臺的數據后進行存儲和顯示。收發控制器接收數傳電臺串口輸出的靶彈下行數據后將靶彈下行數據中包含的安控狀態信息通過27 V開關量輸出給自檢、解鎖、復位、自毀4個指示燈以顯示靶彈當前的安控狀態;收發控制器可以對自檢、解鎖、復位、自毀4個開關信號進行采樣并將采樣結果按照圖 3的時隙通過串口輸出給數傳電臺,作為數傳地面站向彈載數傳設備發送的上行安控指令數據。收發控制器硬件是在彈載數傳設備采編器模塊的基礎上改進而成的,去掉了采編器模塊的32路模擬量采樣和16路開關量采樣中的8路采樣。收發控制器需要對接收彈載數傳設備下行數據進行精確計時,計時精度為1 ms,從而準確控制安控指令的上行時間,以免彈載數傳設備、各地面站發送數據時間相沖突,造成數據丟失。
圖6 地面站電氣原理圖
4 地面站收發控制器軟件設計
地面站中的收發控制器用于對地面站操控面板上的安控指令按鈕采樣,接收彈載數傳設備下行數據并計時,發送上行安控指令數據幀,向地面站操控面板指示燈輸出安控指令信號。收發控制器程序循環周期為1 ms,每100個周期,能夠收到一幀完整的下傳數據。收發控制器收到完整的下傳數據后按圖 3的時隙發送上行安控指令,以保證彈載數傳設備和四臺地面站之間數據傳輸不發送沖突。收發控制器軟件流程如圖 7所示。程序流程開始到節點①用于硬件初始化及各狀態字賦初值,程序流程中①到②之間用于安控指令按鈕采樣,為了消除按鈕抖動和干擾,連續100次采樣有效則該安控指令有效。流程中②到③部分根據安控指令按鈕采樣結果確定安控指令狀態字,自檢、復位、解鎖、自毀安控指令按鈕有效時對應的安控指令狀態字分別為1、2、3、4。流程中③到④以查詢串口緩存的方式接收數傳電臺收到的下行數據,當收到135個字節的完整數據幀之后,幀計數狀態字i置0。流程中④到⑤用于電源和安控指令燈顯示,當地面站穩定接收彈載數傳設備信號時電源燈能夠閃爍;地面站未收到彈載數傳設備信號時電源燈常亮;自檢、解鎖、復位、自毀四盞安控指令燈則根據地面站收到的彈上下傳的安控指令狀態進行對應顯示。流程⑤到⑥用于程序循環周期計時和上行安控指令輸出。當定時器計時大于等于1 ms時定時器置0重新計時。流程⑥到①依據地面站安控指令發送時隙和安控指令狀態字的結果由串口向數傳電臺輸出上行的安控指令,安控指令發送時隙用1 ms循環的幀計數i來確定,地面站A、B、C、D在i值分別為23、28、33、38且安控指令狀態字不等于0時,按照安控指令狀態字來輸出安控指令數據幀,而后程序回到節點①進入下一個循環周期。
圖7 收發控制器軟件流程圖
5 試驗結果與分析
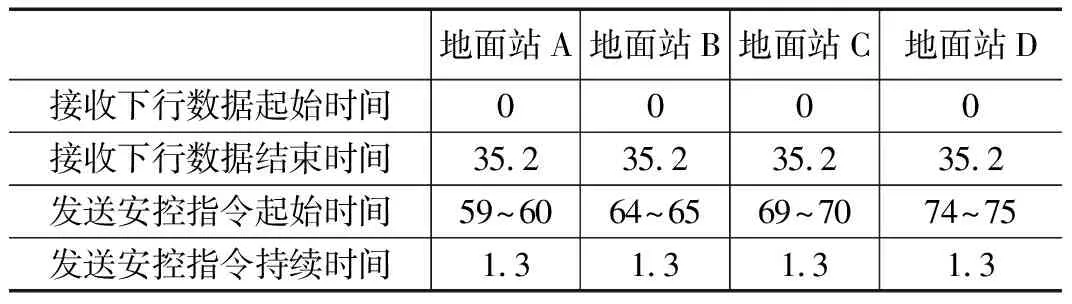
為驗證彈載數傳設備和數傳地面站的工作性能,用四臺數傳地面站和一臺彈載數傳設備進行通信試驗,試驗中數傳地面站編號為A、B、C、D。試驗分為實驗室測試和外場遠距測試。實驗室測試主要檢驗安控指令發送時間是否滿足要求,硬件是否工作正常,軟件流程是否達到設計要求。實驗室測試時四臺地面站同時持續發自檢安控指令,用示波器監測地面站收發控制器RS422串口收到安控指令的結束時間以及發送安控指令的起始和結束時間,試驗結果見表 1。經過多次重啟測試,四臺數傳地面站發送安控指令的起始時間均有1 ms的動態誤差,這是因為數傳地面站收發控制器計時精度為1 ms,因此其發送安控指令的起始時間存在動態誤差。四臺地面站之間發送安控指令的時間間隔有4~5 ms,該時間差可以保證各地面站上行數據不發生干擾。用四臺地面站依次序同時發送自檢、解鎖、復位、解鎖、炸毀安控指令,彈載數傳設備能正常接收指令,未發生指令接收異常的現象。
ms
表1 數傳地面站收發數據時間監測結果
外場遠距測試時,數傳地面站A、B與彈載數傳設備相距20 m,數傳地面站C、D與彈載數傳設備相距21 km。每臺地面站單獨發送安控指令時,彈載數傳設備接收安控指令正常;4臺地面站依次序同時發送自檢、解鎖、復位、解鎖、炸毀安控指令時,彈載數傳設備均能正常接收安控指令。
6 結束語
本文以數傳電臺為核心器件設計了一型靶彈測控系統,該測控系統由彈載數傳設備和數傳地面站組成。該型測控系統在靶彈上使用可以實現在靶彈飛行過程中接收并顯示實時位置和彈載設備工作信息,同時可實現用發送安控指令的方式控制靶彈自毀。數傳地面站采用時分多址的傳輸模式發送安控指令,可以實現4臺地面站同時向一枚靶彈發送安控指令,可使地面站沿靶彈飛行航跡接力布站時各地面站發送安控指令不會相互干擾,該設計方法增加了地面站測控范圍,提高了靶彈測控系統工作可靠性。最后通過對工程樣機的實物測試,該測控系統工作正常,可以實現4臺地面站對靶彈同時進行測控的功能。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中國特種設備安全(2022年6期)2022-09-20 02:52:28
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電子制作(2018年11期)2018-08-04 03:26:08
電信科學(2016年10期)2016-11-23 05:11:56
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
消費者報道(2014年7期)2014-07-31 11:23:57
