自主水下航行器安全拋載系統(tǒng)設(shè)計(jì)
2021-08-23 09:02:20董權(quán)威岳才謙王奧博
計(jì)算機(jī)測(cè)量與控制 2021年8期
董權(quán)威,田 鋒,岳才謙,王奧博
(中國(guó)航天空氣動(dòng)力技術(shù)研究院,北京 100074)
0 引言
自主水下航行器(AUV,autonomous underwater vehicle,)作為海洋開(kāi)發(fā)的重要運(yùn)載平臺(tái),能夠代替人類(lèi)進(jìn)行復(fù)雜、艱巨的工作。可在無(wú)人控制的狀態(tài)下全天候、多航時(shí)地自主完成水下任務(wù),成為在民用領(lǐng)域和軍用領(lǐng)域中重要的海洋開(kāi)發(fā)和安全保障的工具,并且獲得廣泛應(yīng)用。在民用方面,可應(yīng)用于海圖繪制、地形勘察和海底設(shè)備維護(hù)等領(lǐng)域;在軍用方面,可應(yīng)用于海上預(yù)警、海底對(duì)抗、水下情報(bào)搜索、水下目標(biāo)搜索與打擊和戰(zhàn)區(qū)探測(cè)等。AUV因長(zhǎng)期工作在復(fù)雜的海洋環(huán)境中,安全性問(wèn)題一直受到關(guān)注,若在工作中出現(xiàn)事故,輕則造成任務(wù)失敗,重則造成丟失。因此水下航行安全已經(jīng)成為水下航行器領(lǐng)域的重要研究?jī)?nèi)容及智能化水平的重要體現(xiàn),研究高可靠性的拋載技術(shù),提高AUV系統(tǒng)的航行的安全性,對(duì)AUV的實(shí)用化、工程化具有重要的研究?jī)r(jià)值[1-4]。
隨著智能化發(fā)展與大潛深的需求,AUV在復(fù)雜海洋環(huán)境中進(jìn)行無(wú)人無(wú)纜作業(yè)時(shí),如何確保能夠執(zhí)行拋載實(shí)現(xiàn)安全上浮是研究的重點(diǎn)與難點(diǎn)[5-7]。當(dāng)前,對(duì)于AUV拋載系統(tǒng)的研究,主要采用液壓傳動(dòng)拋載、拋掉攜帶的電池組等部件、爆炸螺栓拋載等方式。但在實(shí)際工程應(yīng)用中,液壓傳動(dòng)拋載方式結(jié)構(gòu)復(fù)雜,并且需要依靠電來(lái)驅(qū)動(dòng),當(dāng)AUV出現(xiàn)系統(tǒng)死機(jī)、漏水、掉電或能源不足等問(wèn)題時(shí),則無(wú)法實(shí)現(xiàn)拋載;拋掉隨身攜帶的電池組實(shí)現(xiàn)上浮則會(huì)帶來(lái)成本問(wèn)題;而使用爆炸螺栓拋載存在一定的危險(xiǎn)[8]。因此必須設(shè)計(jì)一個(gè)安全可靠的拋載系統(tǒng),保證AUV在水下發(fā)生任何故障時(shí),都能實(shí)現(xiàn)安全有效拋載。目前,AUV在水下航行過(guò)程中只能對(duì)預(yù)先估計(jì)和實(shí)時(shí)監(jiān)測(cè)的部分故障進(jìn)行拋載動(dòng)作,而對(duì)一些不可預(yù)知的故障則無(wú)有效的應(yīng)對(duì)措施,如:AUV系統(tǒng)發(fā)生死機(jī)、掉電或漏水等故障[9-10]。
針對(duì)上述問(wèn)題,依靠實(shí)體AUV,設(shè)計(jì)出一套安全拋載系統(tǒng),該系統(tǒng)主要由主控單元、安保單元、拋載電路及拋載機(jī)構(gòu)組成,通過(guò)對(duì)設(shè)計(jì)的安全拋載系統(tǒng)進(jìn)行岸上模擬測(cè)試與水下測(cè)試,驗(yàn)證了該系統(tǒng)運(yùn)行的可靠性與穩(wěn)定性,從而提升了AUV在水下作業(yè)時(shí)應(yīng)對(duì)各種故障及危險(xiǎn)下的拋載執(zhí)行能力,擴(kuò)展了AUV的工作范圍,進(jìn)一步保證AUV水下的航行安全。
1 系統(tǒng)結(jié)構(gòu)及原理
為適應(yīng)復(fù)雜的水下環(huán)境,并能夠根據(jù)不同的作業(yè)要求完成相應(yīng)的水下任務(wù),對(duì)AUV的功能進(jìn)行劃分,將其分為主控單元與安保單元兩部分,主控單元包括任務(wù)控制計(jì)算機(jī)、導(dǎo)航控制計(jì)算機(jī)、運(yùn)動(dòng)控制計(jì)算機(jī),用以接收并處理AUV搭載的各類(lèi)傳感器的數(shù)據(jù)信息,實(shí)時(shí)監(jiān)控AUV在水下運(yùn)行的狀態(tài),接收并發(fā)送控制指令,并負(fù)責(zé)AUV的任務(wù)規(guī)劃、水面/水下通信、導(dǎo)航控制與航行運(yùn)動(dòng)控制。安保單元包括安保計(jì)算機(jī)、相關(guān)的驅(qū)動(dòng)電路及拋載機(jī)構(gòu),主要負(fù)責(zé)AUV水下的航行安全,確保當(dāng)其遇到突發(fā)狀況,如電量不足、系統(tǒng)掉電、超時(shí)、超深與系統(tǒng)死機(jī)等,能夠安全出水。主控單元與安保單元通過(guò)CAN總線(xiàn)進(jìn)行指令與數(shù)據(jù)交互。AUV系統(tǒng)劃分原理如圖1所示。
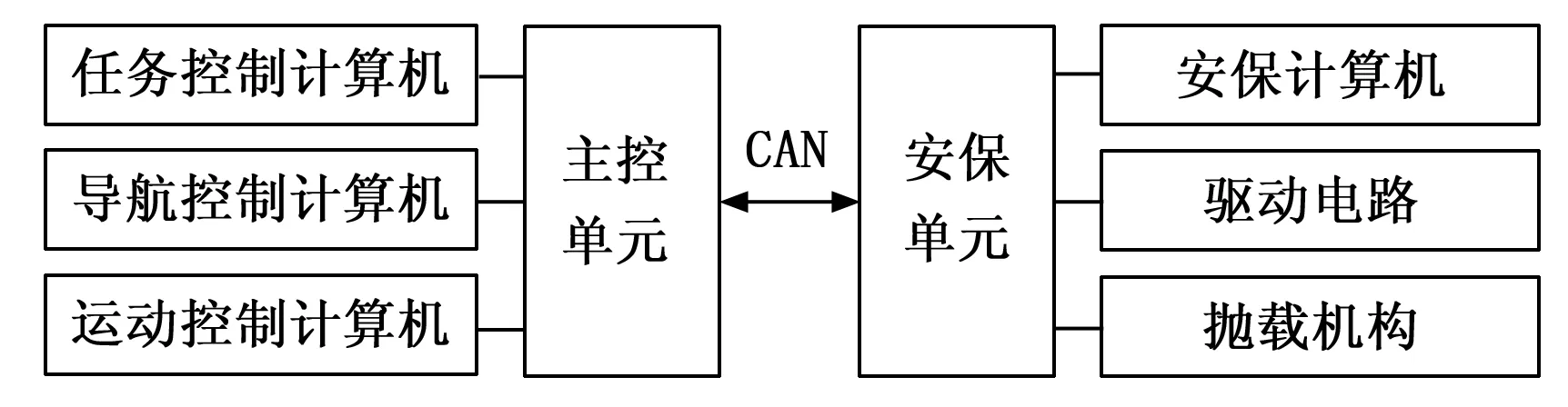
圖1 AUV硬件結(jié)構(gòu)框圖
其中,AUV的安全拋載系統(tǒng)所采用的電磁拋載方式是一種比較成熟的技術(shù),具有結(jié)構(gòu)簡(jiǎn)單、低功耗、運(yùn)行可靠的特點(diǎn),其工作原理主要是將電磁能轉(zhuǎn)換為機(jī)械能,當(dāng)電源接通,內(nèi)部線(xiàn)圈通電,產(chǎn)生電磁場(chǎng),從而吸合壓載;當(dāng)斷開(kāi)電源,內(nèi)部線(xiàn)圈不通電,電磁場(chǎng)消失,從而釋放壓載。拋載后AUV浮力遠(yuǎn)大于重力,從而實(shí)現(xiàn)上浮出水。該方式能夠進(jìn)行實(shí)時(shí)觸發(fā)且性能可靠,系統(tǒng)結(jié)構(gòu)緊湊、工作穩(wěn)定、可控性強(qiáng),能夠快速響應(yīng),因此適用于水下航行器,通過(guò)在特定條件下執(zhí)行拋載,可大大保障水下航行安全,提升環(huán)境適應(yīng)性。
AUV搭載的安全拋載系統(tǒng)能夠使其在水下發(fā)生故障后,以?huà)佪d的形式進(jìn)行緊急出水,設(shè)計(jì)原理簡(jiǎn)單,拋載正確執(zhí)行率成功高。因此對(duì)其安全拋載技術(shù)展開(kāi)相關(guān)研究,以進(jìn)一步提高AUV的拋載執(zhí)行準(zhǔn)確率,提升其水下生存能力。同時(shí),為降低安全拋載系統(tǒng)長(zhǎng)時(shí)間運(yùn)行對(duì)AUV水下續(xù)航能力的影響,對(duì)其控制電路、驅(qū)動(dòng)電路等進(jìn)行完善,進(jìn)一步降低工作能耗,以滿(mǎn)足總體設(shè)計(jì)指標(biāo)。
AUV安全拋載系統(tǒng)主要由安保計(jì)算機(jī)、驅(qū)動(dòng)電路、光耦隔離電路、繼電器與拋載執(zhí)行機(jī)構(gòu)組成。其中,拋載控制信號(hào)由安保計(jì)算機(jī)發(fā)出,并經(jīng)過(guò)繼電器控制電路控制電磁拋載機(jī)構(gòu)的通電與斷電,實(shí)現(xiàn)拋載塊的吸合與釋放。為滿(mǎn)足水下不同的任務(wù)需求,將拋載控制電路分為兩路,一路作為正常拋載使用,當(dāng)執(zhí)行拋載指令時(shí),可觸發(fā)安全拋載,適用于在緊急情況下執(zhí)行拋載,保證AUV能夠隨時(shí)上浮出水。另一路作為重物壓載使用,同時(shí)也可作為二級(jí)拋載,適用于大潛深下AUV無(wú)動(dòng)力下潛。當(dāng)需要AUV進(jìn)行緊急快速上浮時(shí),可同時(shí)觸發(fā)兩路拋載,如圖2所示。
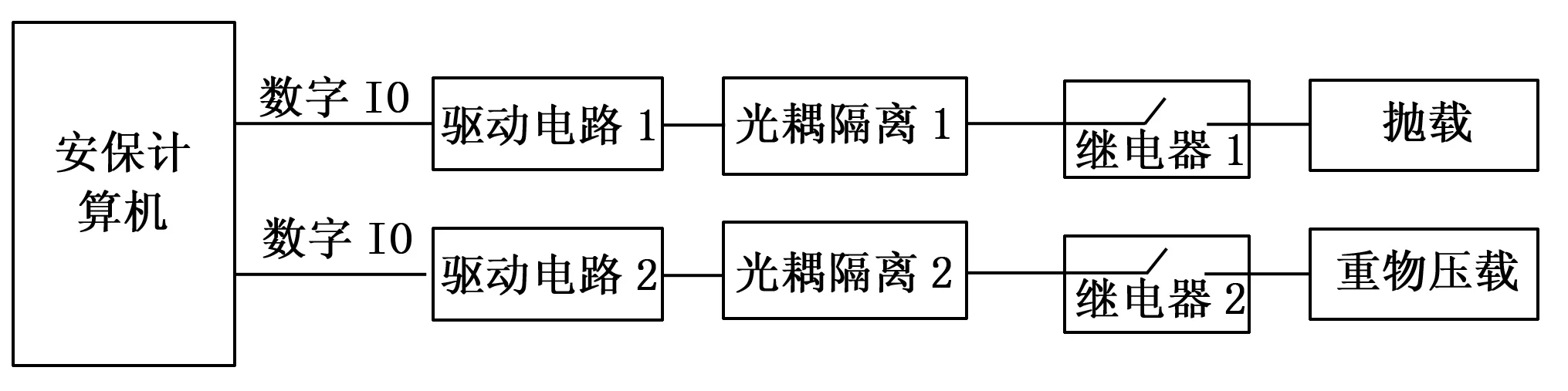
圖2 拋載系統(tǒng)組成框圖
安全拋載系統(tǒng)只在AUV水下航行階段發(fā)揮作用,通過(guò)預(yù)設(shè)指令,保證AUV遇到問(wèn)題或故障后能夠執(zhí)行拋載動(dòng)作而上浮出水,因此需要對(duì)AUV整個(gè)航行過(guò)程中可能遇到的問(wèn)題進(jìn)行梳理,并將其加入控制流程,所涉及的故障及危險(xiǎn)主要包括:
1)系統(tǒng)超時(shí):AUV在水面執(zhí)行下潛指令后,在水下的航行時(shí)間超過(guò)程序設(shè)定的最大航行時(shí)間。
2)系統(tǒng)超深:AUV水下航行深度超過(guò)程序設(shè)定的最大深度。
3)電量不足:AUV電池電量低于程序設(shè)定的最低電量。
4)設(shè)備故障:AUV內(nèi)部某路設(shè)備或載荷在航行過(guò)程中工作異常或停止工作。
5)不可預(yù)知故障:如系統(tǒng)掉電、死機(jī)、艙體漏水等不同于上述的故障或危險(xiǎn)。
2 拋載系統(tǒng)硬件設(shè)計(jì)
拋載系統(tǒng)的主要工作是實(shí)時(shí)采集并監(jiān)控AUV的各種狀態(tài)信息,如深度信息、電量信息、設(shè)備狀態(tài)信息等,若檢測(cè)到AUV出現(xiàn)超時(shí)、超深、電量不足、設(shè)備異常等故障,安保計(jì)算機(jī)則發(fā)送拋載指令,通過(guò)復(fù)位相應(yīng)引腳的IO口,最終使拋載機(jī)構(gòu)執(zhí)行拋載動(dòng)作。其中,拋載機(jī)構(gòu)采用電磁鎖控制方式,即拋載機(jī)構(gòu)的工作方式方式為通電上鎖,斷電解鎖,因此可保證當(dāng)出現(xiàn)系統(tǒng)掉電、安保計(jì)算機(jī)死機(jī)、AUV艙內(nèi)進(jìn)水等不可預(yù)知故障時(shí),安保計(jì)算機(jī)的IO口不能正常輸出持續(xù)的高電平信號(hào),因此可自動(dòng)觸發(fā)拋載。
拋載系統(tǒng)的安保計(jì)算機(jī)采用基于ARM的STM32F407ZGT6芯片作為MCU,該芯片的資源豐富,集成FPU和DSP指令,具有192 KB SRAM,1 024 KB FLASH,內(nèi)部通信可滿(mǎn)足各節(jié)點(diǎn)設(shè)備接口的使用要求。光耦隔離電路采用TLP250,其為可控的光電耦合器件,可實(shí)現(xiàn)電路之間的信號(hào)傳輸,能夠使前端與負(fù)載完全隔離,安全性得到進(jìn)一步加強(qiáng),并能減小電路干擾,減化電路設(shè)計(jì)。驅(qū)動(dòng)電路采用ULN2003,該芯片由7路高耐壓與大電流的復(fù)合晶體管構(gòu)成,最大灌電流可達(dá)500 mA,可在高負(fù)載電流下并行運(yùn)行。兩路拋載分別通過(guò)各自的控制繼電器控制,繼電器型號(hào)為G2R-2A4,該繼電器線(xiàn)圈電壓24 V,由一路線(xiàn)圈輸入和兩路開(kāi)關(guān)組成,并將繼電器的兩路輸出共同驅(qū)動(dòng)一路拋載,可進(jìn)一步提高驅(qū)動(dòng)能力與可靠性。安保計(jì)算機(jī)控制拋載的兩路信號(hào)正常狀態(tài)下為高電平,即拋載系統(tǒng)上電后,拋載機(jī)構(gòu)保持吸合狀態(tài)。當(dāng)需要執(zhí)行拋載動(dòng)作時(shí),安保計(jì)算機(jī)接收到拋載指令,并通過(guò)IO口發(fā)送拋載指令,IO口輸出低電平,此時(shí)拋載繼電器斷電,拋載機(jī)構(gòu)斷電拋載,其工作原理為:
1)驅(qū)動(dòng)電路接收到來(lái)自控制計(jì)算機(jī)的IO信號(hào)為高電平信號(hào)時(shí),驅(qū)動(dòng)電路會(huì)將電平轉(zhuǎn)換成低電平并輸出給下一級(jí)。
2)光耦隔離電路的地端(GND) 與驅(qū)動(dòng)電路的輸出連接,正極與電源連接,當(dāng)接收到來(lái)自驅(qū)動(dòng)電路輸出的低電平信號(hào)時(shí),此時(shí)光耦隔離電路導(dǎo)通,觸發(fā)發(fā)光二極管,使得光耦隔離電路的輸出端正負(fù)導(dǎo)通,繼電器閉合(常開(kāi)觸點(diǎn)),拋載機(jī)構(gòu)上電吸合。
3)當(dāng)系統(tǒng)遇到故障需要執(zhí)行拋載指令時(shí),安保計(jì)算機(jī)的數(shù)字IO口輸出低電平,導(dǎo)致驅(qū)動(dòng)電路的電平與上述情況相反,最終使繼電器斷電,執(zhí)行拋載。拋載系統(tǒng)的電路原理如圖3所示。
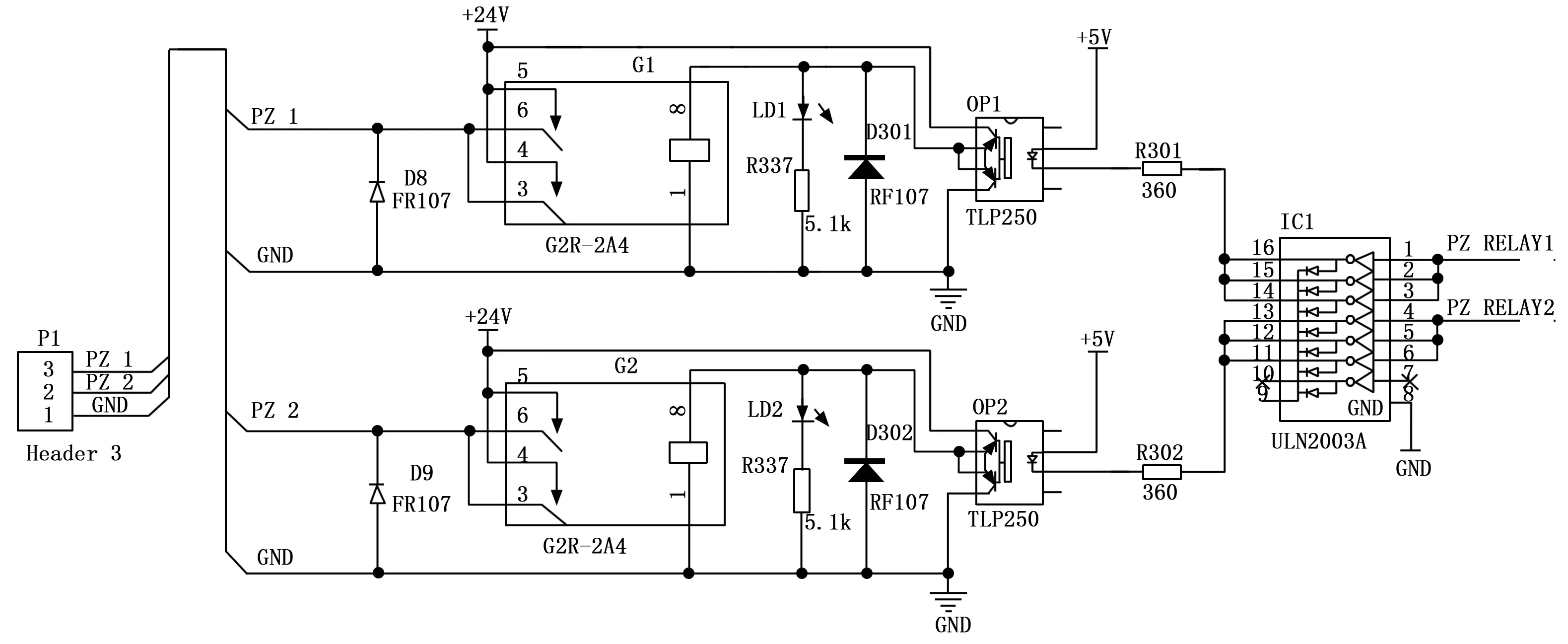
圖3 拋載系統(tǒng)電路設(shè)計(jì)原理圖
3 拋載系統(tǒng)軟件設(shè)計(jì)
拋載系統(tǒng)的拋載指令下發(fā)與反饋通過(guò)CAN總線(xiàn)實(shí)現(xiàn),AUV運(yùn)行過(guò)程中,主控單元的任務(wù)控制計(jì)算機(jī)會(huì)實(shí)時(shí)監(jiān)測(cè)搭載在CAN總線(xiàn)的上的各路系統(tǒng)及設(shè)備,包括導(dǎo)航控制計(jì)算機(jī)、運(yùn)動(dòng)控制計(jì)算機(jī)及相關(guān)載荷設(shè)備等。當(dāng)監(jiān)測(cè)到某路出現(xiàn)故障危及AUV正常航行時(shí),則通過(guò)CAN總線(xiàn)向安保計(jì)算機(jī)發(fā)送拋載指令,安保計(jì)算機(jī)接收到該指令,則對(duì)拋載的相關(guān)接口進(jìn)行復(fù)位,此時(shí)拋載機(jī)構(gòu)斷電拋載。同時(shí)當(dāng)出現(xiàn)非預(yù)知故障,如AUV突然掉電、系統(tǒng)關(guān)機(jī)等情況,導(dǎo)致拋載系統(tǒng)無(wú)法工作而斷電拋載。因此為確保AUV在水下遇到任何緊急情況都能安全出水,需要對(duì)拋載的控制策略及控制流程進(jìn)行設(shè)計(jì),以保障AUV水下的航行安全。
AUV安全拋載系統(tǒng)的工作流程如下:
1)AUV下水前,裝載拋載塊,并進(jìn)行水面自檢,確保拋載系統(tǒng)工作狀態(tài)運(yùn)行正常。
2)下潛任務(wù)裝訂并成功下發(fā)后,AUV執(zhí)行下潛,安保計(jì)算機(jī)內(nèi)置計(jì)數(shù)器開(kāi)始計(jì)數(shù),同時(shí)實(shí)時(shí)采集AUV內(nèi)部深度傳感器的深度信息,當(dāng)AUV在水下航行時(shí)間超過(guò)程序設(shè)定的水下最大工作時(shí)間,計(jì)數(shù)器溢出,觸發(fā)拋載;當(dāng)系統(tǒng)在達(dá)到程序設(shè)定的最大工作時(shí)間前,AUV已出水,則清空計(jì)數(shù)器計(jì)數(shù),并停止計(jì)數(shù),直至收到下一次水下航行指令,超時(shí)拋載工作流程如圖4所示。
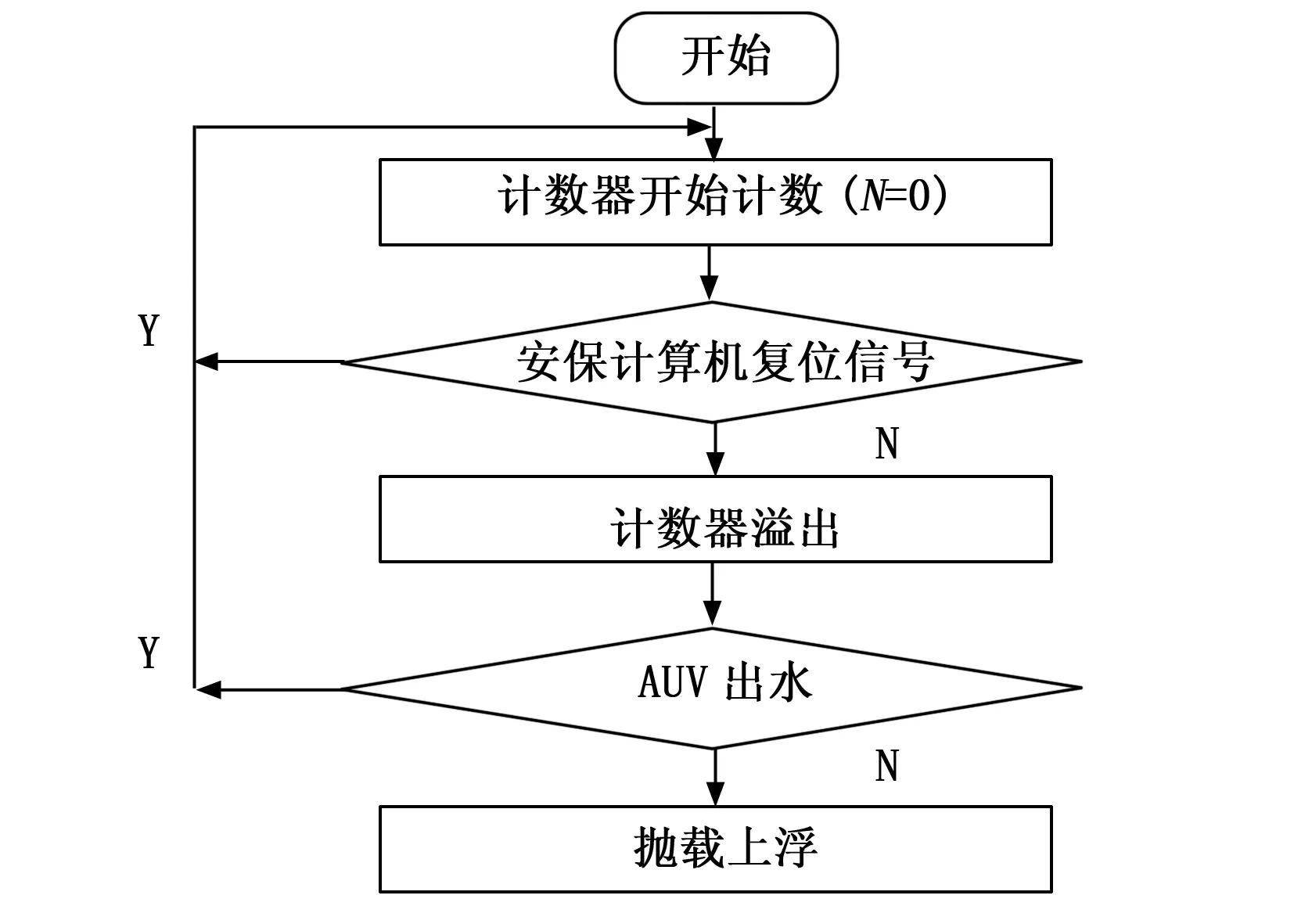
圖4 系統(tǒng)超時(shí)拋載工作流程
3)AUV在水下航行過(guò)程中,安保計(jì)算機(jī)實(shí)時(shí)采集深度傳感器的深度信息,當(dāng)檢測(cè)到AUV航行的深度大于程序設(shè)定的最大航行深度,則觸發(fā)拋載指令,啟動(dòng)應(yīng)急拋載,超深拋載工作流程如圖5所示。
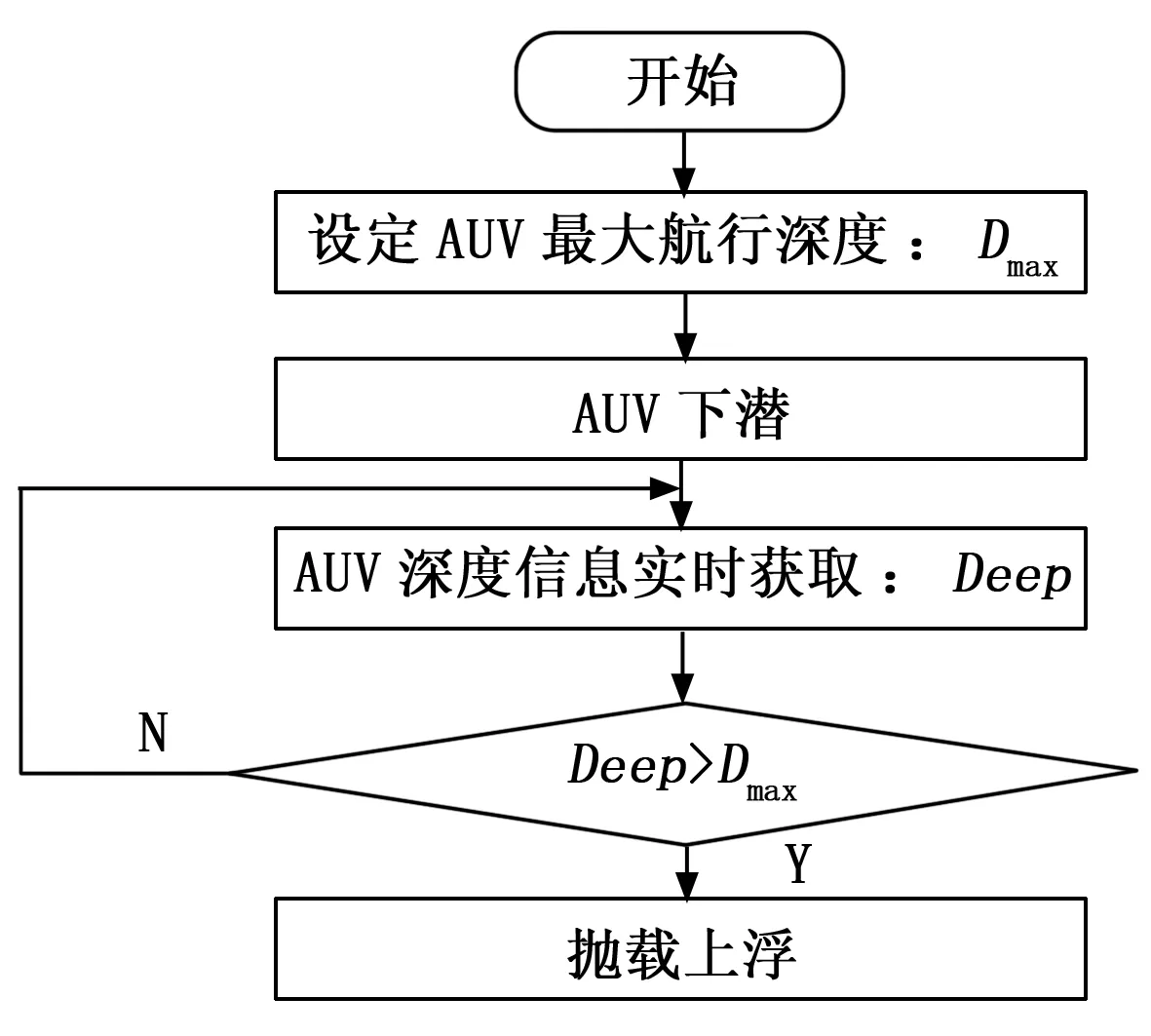
圖5 系統(tǒng)超深拋載工作流程
4)AUV在水下航行過(guò)程中,安保計(jì)算機(jī)實(shí)時(shí)采集電池電量信息,若檢測(cè)到AUV的剩余電量低于安全閾值,則結(jié)束水下任務(wù),上浮出水,若電量低于程序設(shè)定的最低值仍未出水,則啟動(dòng)拋載上浮,低電量拋載工作流程如圖6所示。
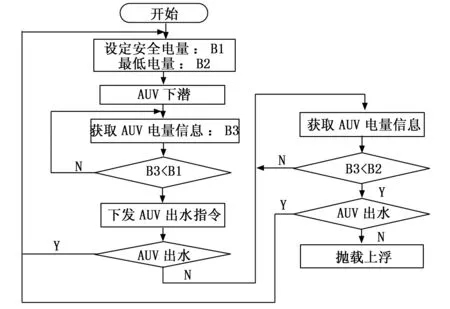
圖6 AUV電量不足情況下工作流程
5)AUV在水下航行過(guò)程中,安保計(jì)算機(jī)實(shí)時(shí)接收來(lái)自其他控制系統(tǒng)或設(shè)備的狀態(tài)信息,正常情況下,相應(yīng)的控制系統(tǒng)或設(shè)備會(huì)向外發(fā)送自身狀態(tài)信息,若出現(xiàn)異常,如系統(tǒng)死機(jī)、程序跑飛、掉電等,此時(shí)安保計(jì)算機(jī)檢測(cè)到該系統(tǒng)或設(shè)備的異常,并發(fā)送斷電重啟指令,從而觸發(fā)繼電器關(guān)斷并再次上電,以重啟相關(guān)分系統(tǒng)或設(shè)備,若仍異常,則執(zhí)行拋載指令,AUV上浮出水。
6)當(dāng)AUV在水下航行時(shí),若發(fā)生不可預(yù)知的故障,如艙體漏水、系統(tǒng)突然掉電等,會(huì)導(dǎo)致內(nèi)部電路短路、斷電等現(xiàn)象,此時(shí)均會(huì)導(dǎo)致拋載繼電器斷電觸發(fā)拋載。或由于安全拋載系統(tǒng)本身出現(xiàn)問(wèn)題,如安保計(jì)算機(jī)故障、驅(qū)動(dòng)電路或光耦電路芯片損毀等,亦會(huì)使拋載機(jī)構(gòu)掉電觸發(fā)拋載。
4 實(shí)驗(yàn)結(jié)果與分析
AUV安全拋載系統(tǒng)的測(cè)試項(xiàng)目分為兩項(xiàng)內(nèi)容:耐壓測(cè)試與性能測(cè)試。首先對(duì)該系統(tǒng)的耐壓防水性進(jìn)行測(cè)試,將安全拋載系統(tǒng)的拋載機(jī)構(gòu)與10 kg的拋載塊置于充滿(mǎn)水的密閉高壓罐,拋載機(jī)構(gòu)的接口與控制電路引出罐體,通過(guò)打壓裝置對(duì)其進(jìn)行逐級(jí)打壓,直至罐體內(nèi)壓力升高至10 MPa。在打壓過(guò)程中,安全拋載系統(tǒng)運(yùn)行良好,拋載指令收發(fā)正常,并能夠正確執(zhí)行拋載動(dòng)作,拋載準(zhǔn)確率為100%,驗(yàn)證了在10 MPa壓力范圍內(nèi),拋載系統(tǒng)仍能穩(wěn)定工作,無(wú)漏水滲水現(xiàn)象,且拋載系統(tǒng)的功耗為2.8 W,均滿(mǎn)足設(shè)計(jì)要求。
拋載系統(tǒng)的耐壓測(cè)試完成后,對(duì)其進(jìn)行性能測(cè)試,性能測(cè)試分為岸上模擬測(cè)試與水下測(cè)試。岸上模擬測(cè)試主要測(cè)試整個(gè)系統(tǒng)的控制流程,驗(yàn)證拋載系統(tǒng)設(shè)計(jì)的可行性與有效性。水下測(cè)試則是對(duì)AUV進(jìn)行全流程測(cè)試,通過(guò)設(shè)置相關(guān)的參數(shù),以滿(mǎn)足設(shè)定的拋載條件,從而觸發(fā)拋載。
其中,拋載的岸上模擬測(cè)試主要包括:主控單元中任務(wù)控制系統(tǒng)故障或通信異常、導(dǎo)航控制系統(tǒng)故障或通信異常、運(yùn)動(dòng)控制系統(tǒng)故障或通信異常、系統(tǒng)超時(shí)、超深、電量不足、意外掉電等,測(cè)試效果體現(xiàn)在故障發(fā)生后是否觸發(fā)拋載機(jī)構(gòu)的磁力鎖失鎖導(dǎo)致拋載塊掉落。岸上模擬的測(cè)試流程按照上述情況進(jìn)行相關(guān)測(cè)試,每種工況各測(cè)試5次,如表1所示。下表列出的意外掉電的模擬測(cè)試是通過(guò)在系統(tǒng)運(yùn)行過(guò)程中人為斷開(kāi)安全拋載系統(tǒng)的供電電源或AUV的總電源實(shí)現(xiàn)。電池電量不足的模擬測(cè)試則是通過(guò)降低AUV的供電電源實(shí)現(xiàn)。最終測(cè)試結(jié)果顯示,所設(shè)定的故障觸發(fā)的拋載執(zhí)行準(zhǔn)確率為100%。
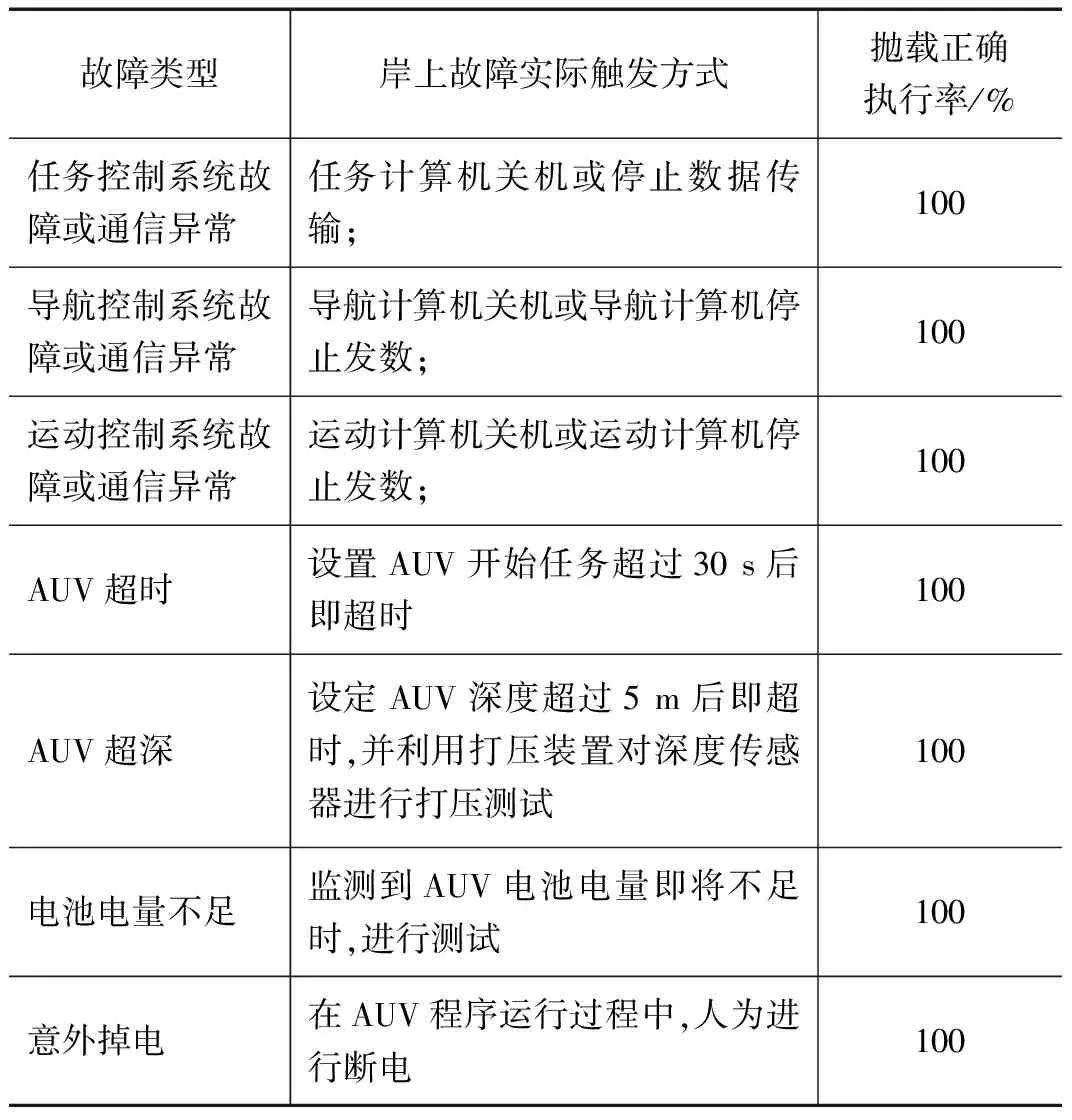
表1 安全拋載系統(tǒng)岸上模擬測(cè)試內(nèi)容
為進(jìn)一步全面驗(yàn)證安全拋載系統(tǒng)的性能,將其集成到實(shí)體AUV內(nèi)進(jìn)行實(shí)際的水池測(cè)試,并按照上述故障測(cè)試流程進(jìn)行測(cè)試,最大程度的還原AUV在水下運(yùn)行時(shí)所面臨的真實(shí)環(huán)境與實(shí)際工況。最終通過(guò)水池試驗(yàn)證明,AUV在水下測(cè)試過(guò)程中,通過(guò)觸發(fā)相關(guān)故障使其拋載系統(tǒng)執(zhí)行拋載動(dòng)作時(shí),無(wú)未拋和誤拋現(xiàn)象發(fā)生,且均能正確執(zhí)行程序設(shè)定的拋載指令,可靠性得到有效驗(yàn)證。不過(guò),其在復(fù)雜水況及長(zhǎng)時(shí)間運(yùn)行條件下拋載執(zhí)行的穩(wěn)定性與可靠性仍需進(jìn)行進(jìn)一步測(cè)試及驗(yàn)證。
5 結(jié)束語(yǔ)
AUV航行的安全性是其水下任務(wù)能否順利完成的關(guān)鍵技術(shù),也是保證其安全返回的重要保障。基于此,本文設(shè)計(jì)了一套適用于AUV的安全拋載系統(tǒng),不同于傳統(tǒng)的設(shè)計(jì)方案,該系統(tǒng)設(shè)計(jì)原理簡(jiǎn)單、工作可靠、功耗低,針對(duì)AUV水下發(fā)生的各類(lèi)故障均能觸發(fā)安全拋載,且拋載執(zhí)行效率達(dá)到100%,各項(xiàng)指標(biāo)滿(mǎn)足總體設(shè)計(jì)要求,并最終通過(guò)了耐壓測(cè)試與性能測(cè)試, 實(shí)用性與可靠性得到有效驗(yàn)證,進(jìn)一步提升了AUV自主解決故障或危險(xiǎn)的能力,為AUV水下作業(yè)提供了安全保證,因此大大提升了AUV的水下生存能力與環(huán)境適應(yīng)性。未來(lái),還需對(duì)其在復(fù)雜水況及長(zhǎng)時(shí)間運(yùn)行條件下的穩(wěn)定性及可靠性做進(jìn)一步測(cè)試。
猜你喜歡
科普童話(huà)·神秘大偵探(2023年1期)2023-05-30 12:48:10
小學(xué)科學(xué)(學(xué)生版)(2021年7期)2021-07-28 06:44:42
科技傳播(2019年22期)2020-01-14 03:06:34
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
消費(fèi)導(dǎo)刊(2017年20期)2018-01-03 06:26:40
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
