
全自動水陸兩棲服務機器人平臺*
2021-08-23 02:35:58吳英健張京玲林柏誠候飛龍
科技創新與應用 2021年22期
關鍵詞:服務
吳英健,歐 濤,張京玲,林柏誠,候飛龍
(五邑大學 智能制造學部,廣東 江門529020)
“十一五”期間,國家已經把“廢墟搜索與輔助救援機器人”列入國家863項目,由此可見救援機器人的重要性。全自動水陸兩棲服務機器人具有很強的環境適應能力,有廣泛的作業范圍,方便投放與回收,可在人類無法完成作業的地形,安全快捷檢測水質[1-2],例如陸地、湖泊、河流、沼澤和海洋等,既可以應用于河道水質檢測,也可以應用于淡水養殖和緊急的救援活動等。
本論文設計了全自動水陸兩棲服務機器人平臺,可以實現河道水質全自動檢測,淡水養殖全自動管理和全自動緊急救援等功能。用戶還可以通過電腦端或者手機端直接控制水陸兩棲服務機器人完成作業。
1 平臺總體設計
全自動水陸兩棲服務機器人平臺由水陸兩棲機械結構、環境建模子系統(包括環境建模主控器、通信系統、定位導航避障系統、攝像頭)、工控子系統、中央控制平臺和多種配件裝置等部分組成。
中央控制平臺獲取用戶各種任務指令,系統對每個任務劃分優先級,通過A*算法[3]生成一條大致路徑,之后再通過布谷鳥優化算法[4]生成一條優化路徑,通信系統自動控制水陸兩棲服務機器人完成相應任務。水陸兩棲服務機器人利用定位模塊和避障模塊實時獲取自身位置和周邊障礙物情況,采用履帶和螺旋槳兩種動力傳輸,完成水陸混雜任務。同時,還可通過攝像頭在電腦和手機端進行遠程實時遙控。平臺上設定導軌和卡口,可以根據不同應用場景的不同任務需求,靈活搭建多種配件裝置。
平臺電控部分由環境建模主控器、WiFi通信模塊、定位模塊、避障模塊、攝像頭模塊、工控控制器、電機驅動模塊、各配置功能控制模塊和電源模塊等組成。水陸兩棲服務機器人電控框圖如圖1所示。
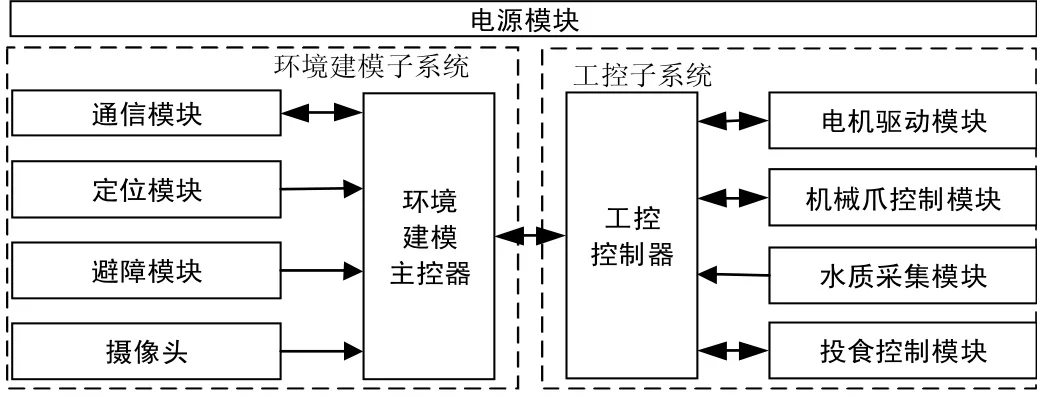
圖1 全自動水陸兩棲服務機器人電控框圖
2 多傳感器融合導航系統設計
定位模塊采用基于TDOA算法UWB定位技術與低成本GPS組合定位的水上機器人位置定位方法提供高精度定位[5]。導航避障模塊采用毫米波雷達傳送目標信息,激光雷達傳送360°距離信息,風向傳感器傳送風速及角度,定位系統傳送水陸兩棲服務機器人位置信息。環境建模主控制器處理這些信息判定自身與目標體的相對位置并得出相應指令控制機器人。多傳感器融合的導航系統框圖如圖2所示。
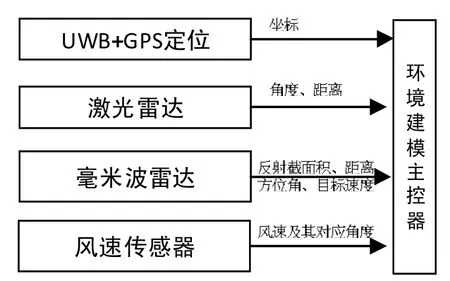
圖2 多傳感器融合的導航系統框圖
2.1 UWB與GPS組合高精度定位
使用基于TDOA算法的UWB定位技術與低成本GPS組合定位方法。不僅能夠節省技術成本而且能夠大幅度提高定位精度。
基于TDOA的UWB定位技術測量出來的水陸兩棲服務機器人的實時位移觀測方程和GPS定位技術的偽距觀測方程得到位置補償方程。然后,位置補償方程與GPS的偽距觀測方程使用擴展卡爾曼濾波算法進行數據融合,最后得到具有實時性和方向性的精確水上定位坐標。
2.2 基于人工勢場法的自主避障算法
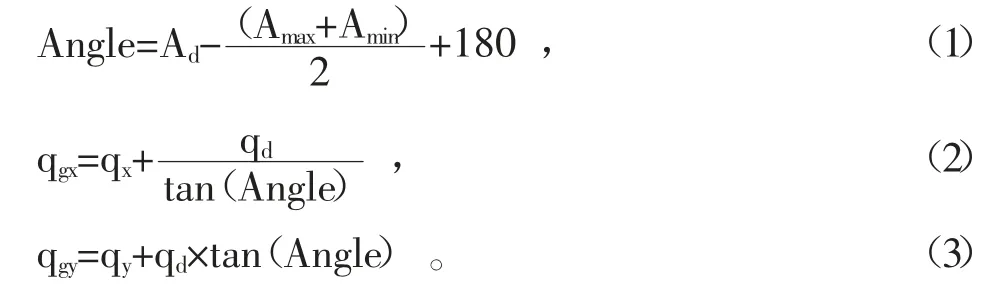
首先根據當前姿態信息、環境感知信息以及路徑規劃信息生成當前坐標信息,當水陸兩棲服務機器人前方檢測存在障礙物且周邊沒有障礙物時,進一步判斷朝向是否與當前目的地連接線段相接近以及當前坐標與當前目標坐標在某一坐標是否接近后,把當前坐標修改為接近的坐標;當水陸兩棲服務機器人前方檢測存在障礙物且周邊有障礙物時,按照人工勢場法的原則如公式(1)-(3)所示令水陸兩棲服務機器人與障礙物產生斥力,將當前位置坐標與障礙物邊緣的坐標形成水陸兩棲服務機器人偏轉角度并生成新的目標點實現避障。避障流程圖如圖3所示。
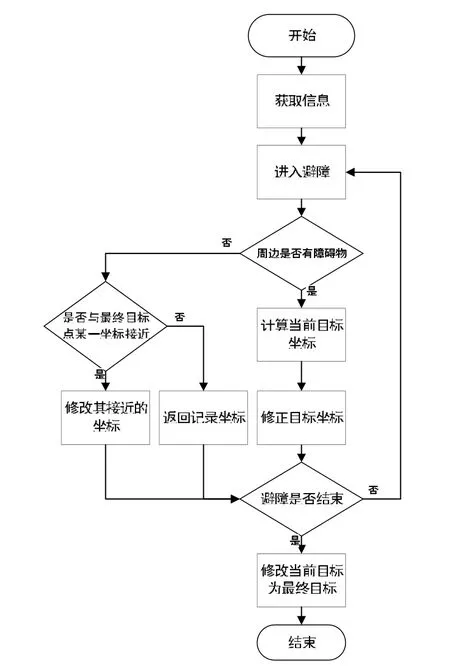
圖3 避障流程圖
3 基于分段式雙閉環PID的電機控制
水陸兩棲服務機器人在接收到工控機下達的目標坐標指令之后會啟動電機推動水陸兩棲服務機器人向目標航向航行。
水面航行器容易受到慣性的影響而難以控制,因此一般的PID在水面航行會出現很難達到預想效果,所以增加對速度V與角速度AV變量來對慣性進行調節。通過傳感器獲取的航向角度作為閉環的外環,實現航向角度的閉環控制。根據電機轉速大小分為低速、中速、高速三個檔次,通過給三個檔次分別設置三個特定的PID控制器,以此來克服無刷直流電機在越高轉速的情況下越難達到使水陸兩棲服務機器人航行穩定的缺點。通過將兩棲機器人的速度作為閉環的內環來實現其速度控制。在雙閉環PID控制器的控制下對PWM輸出進行調節,最終實現對航向姿態的穩定調整。雙閉環PID控制系統如圖4所示。如公式(4)所示,u(t)為控制器的輸出量,e(t)為控制輸入量,即給定量與輸出量的偏差,水陸兩棲服務機器人通過PID控制器計算得:
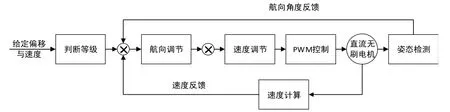
圖4 雙閉環PID電機控制系統

4 多任務路徑規劃算法
首先,在地圖上放置多邊形的可行區域,規定機器人平臺的活動范圍,然后在軟件界面放置任務類型、緊急程度和坐標,利用A*算法,把設備設置為起點和父類,各個任務坐標點為終點,計算得到當前設備坐標與各個目標點的G的總值和設備到達各個目標點的路徑,記錄為一個各任務點間的距離矩陣[6]。用布谷鳥優化算法對路徑進行優化,尋找時間成本最低的最短路徑。其中,用輪盤賭的方式產生一個較優的初始化解,大幅度降低迭代次數,減少算法優化的時間成本。而優化過程使用自適應算子,讓算法能快速收斂,能在短時間內得到最優解。采取以下方法準則對路徑節點進行優化:
(1)刪除節點準則。
(2)新增節點準則。即進行弗洛伊德平滑優化,得到一條平滑的路徑。路徑規劃算法流程圖如圖5所示。
5 結論
該系統平臺定位誤差在10cm以內,避障最大距離為50m,最大航速2.5m/s,可以較好完成水陸混雜的自動巡航任務;能夠搭建多種配件裝置,例如機械臂裝置、水質檢測裝置等用于洪水緊急救援、精細養殖以及改良河道等應用場景。
猜你喜歡
杭州金融研修學院學報(2022年5期)2022-06-15 11:41:48
今日農業(2019年14期)2019-09-18 01:21:54
今日農業(2019年12期)2019-08-15 00:56:32
今日農業(2019年11期)2019-08-13 00:49:08
今日農業(2019年13期)2019-08-12 07:59:04
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年15期)2019-01-03 12:11:33
今日農業(2019年16期)2019-01-03 11:39:20
銅仁學院學報(2018年4期)2018-06-13 03:21:34
商周刊(2017年9期)2017-08-22 02:57:56
