無人機電力巡檢的風險管理技術研究
2021-08-23 02:36:12李雄剛李國強
科技創新與應用 2021年22期
李雄剛,陳 赟,李國強
(廣東電網有限責任公司機巡管理中心,廣東 廣州510000)
目前,我國已形成華北、東北、華東、華中、西北和南方電網共6個跨省區電網,電網規模已位居世界首位。隨著電網規模的逐漸擴大,電力巡檢工作也遇到了前所未有的挑戰。對輸電線路進行定期巡視檢查,隨時掌握和了解輸電線路的運行情況以及線路周圍環境和線路保護區的變化情況,是供電部門一項重要且繁瑣的日常工作。傳統的電力巡檢主要靠人工巡檢方式,這種巡檢方式在一些惡劣條件下,如跨江跨河或高山峻嶺地區,不僅勞動強度大、工作條件艱苦,而且存在嚴重的安全隱患,影響檢修工作人員的人身安全。隨著無人機技術的快速發展,無人機應用于輸電線路巡檢以替代人工巡檢正逐漸成為現實,運用無人機進行電力巡檢,有著其他巡檢方式無法超越的優勢:(1)可避免人員安全事故;(2)不受地形地貌的限制;(3)巡檢效率高;(4)飛行成本低;(5)巡線效果穩定[1]。然而運用無人機進行電力巡檢時,仍有許多潛在的風險。出于安全風險的考慮,電網企業相繼開展無人機巡線風險管理技術的研究[2]。南方電網針對性地建立了機巡風險管理技術研究,實現風險管理的全面化,為無人機電力巡檢管理提供支撐。
1 風險管理技術研究內容
通過層次分析從預先風險評估、過程風險控制及事后風險管理三個時間維度,飛行沖突風險、公共安全風險、國家空域運行安全風險三個層面,分析無人機運行的風險,構建立體化的機巡作業安全風險管理技術機制。經過分析,構建如表1電力巡線無人機運行全過程風險管理分析矩陣:

表1 電力巡線無人機運行全過程風險管理矩陣
A1B1:預先風險評估階段,對飛行沖突層面的風險評估。
機巡計劃智能調度的設計中,對不同航路機巡任務的分配是非重疊的,通過SORA《特定類無人機試運行管理規程(暫行)》中根據SAIL值針對UAS相關技術問題、支持UAS運行的外部系統性能、人為因素和不利的運行條件、氣象等方面對各項運行安全目標制定安全檢查表,進行預先性風險評估。
A1B2:預先風險評估階段,對公共安全層面的風險評估。
找出任務執行風險的基本要素,制定安全檢查表。
A1B3:預先風險評估階段,對國家空域運行安全的風險評估。
主要通過危險源區域的辨識與劃分后,基于風險清單分析法對智能調配的機巡任務航線中危險源區域的避讓驗證評估。
A1B1、A1B2、A1B3因素實現了飛行前預先風險管理,定量評估結果作為機巡智能調度優化算法的約束條件之一,運用飛行后風險管理建立的風險集完成風險評估,有效降低風險發生概率,提升機巡調度的安全性和可靠性。
A2B1:飛行過程風險控制階段,對公共安全風險的管理。
(1)通過SORA將項目無人機運行風險場景進行劃分;(2)根據SORA要求將危險源區域進行性質和危險等級劃分;(3)對飛行沖突風險采用線性外推法進行沖突的預判,分別對水平和垂直方向的沖突預警探測,為降低虛警概率采用滑窗相關算法完成沖突確認,從而實現機巡運行過程中飛行沖突風險的管理。
A2B2:通過傳感器設置感應函數和預警函數,達到飛行障礙物規避功能。
A2B3:飛行過程風險控制階段,對空域安全的管理。
將機巡空域劃分網格作為航路規劃參考數據,依據A1B3的空域安全驗證性評估實現機巡運行時段的風險監測,設置路徑修正流程,規避因為路徑問題而導致的嚴重事故。
A2B1、A2B2、A2B3因素實現了機巡作業運行階段的風險管控,過程中風險事件的統計也為飛行后風險管理階段分析關聯風險事件、風險特征識別及風險集的建立提供數據支撐。
A3:飛行后風險分析過程。
運用評估矩陣從無人機自身飛行情況數據,地面人員主觀評價兩方面對此次任務進行評價,后臺風險管理人員對任務完成情況評價進行量化補充風險評估集,豐富機巡智能調度中風險約束條件的數據庫。
2 預先風險管理
2.1 飛行沖突風險評估
建立無人機機巡作業調度模型,需要充分考慮作業任務需求、空域環境、資源能力、人員配置、調度成本、氣象條件、地理特征等因素對機巡調度任務規劃的影響,根據不同階段的需求差異和不同巡檢航線的風險差異,可能產生一系列直接或間接的優化約束條件。公共安全風險涉及無人機無序飛行對航空秩序的影響,機身、附件或外加載荷的墜落或碰撞侵害他人人身和財產安全。在機巡計劃智能調度中,充分考慮上述因素,對機巡計劃開展預先風險評估,并以此為優化約束條件降低公共安全隱患,維護社會和公民個人從事和進行正常生活所需要的穩定外部環境和秩序,同時提升機巡作業的可靠性,保障機巡工作在安全、高效的前提下開展。
根據SORA《特定類無人機試運行管理規程(暫行)》[3]和《民用無人駕駛航空器系統適航審定項目風險評估指南》(AC-XX-AA-2020-XX)[4]中針對無人機相關技術問題、支持無人機運行的外部系統性能、人為因素和不利的運行條件、組織機構、氣象等方面對各項運行安全目標制定安全檢查表,進行預先性風險評估。安全檢查表中無人機的技術問題占35%,人為錯誤占15%,組織機構占5%,不利運行條件占10%,支持無人機運行的外部系統惡化占15%,氣象條件占10%,內審及與局方的接口占5%,文件控制占5%。表中總評分為100分,各單元權重不同,單元相加總權重為1,其單元滿分為100分,單元權重以及各單元中各評估內容具體分數可根據項目實際情況進行調整。90分以上為低風險,80-90為中風險,80分以下為高風險,中風險情況下是否可以運行,則由決策人員決定。
2.2 公共安全預先風險評估
機巡作業無人機的飛行路徑上可能存在一些限制區域,如人口密集區、電力特殊區域、山林、重要建筑、交通區域(機場、高鐵、公路)等,在經過這些區域時可能發生事故,如墜機、涉密或侵犯隱私,產生公共安全事故,同樣也會產生社會輿論,對機巡作業造成不利影響。可以通過預先路線檢查,來規避墜機所可能造成的公共安全事故,并制定輸電線路危險源控制表,將路徑上的危險源標記出來,若巡檢過程中經過上述位置,則將其位置上傳至路徑規劃系統,采用路徑規劃系統重新規劃路線。
制定危險源控制表時需要注意以下三點:
(1)已登記的危險源要定期更新,對已規劃路徑定期排查。(2)危險源位置要準確,并對危險源是否規避做出判斷。(3)更新后,重新審核控制措施是否合適。
而危險性質和危險內容可由當地供電所工作人員前去查看,危險性質分為:交叉跨越、人口密集區、環境特殊區域、重要建筑、交通區域(機場、高鐵、公路)、牲畜養殖、作物種植、線路本體、安全距離。其中經濟損失情況由相關工作人員、公司領導、專家根據當地經濟情況和公司財務,以及法律有關案件賠付程度制定。輸電線路危險源控制表與路徑規劃系統配合流程如圖1所示。
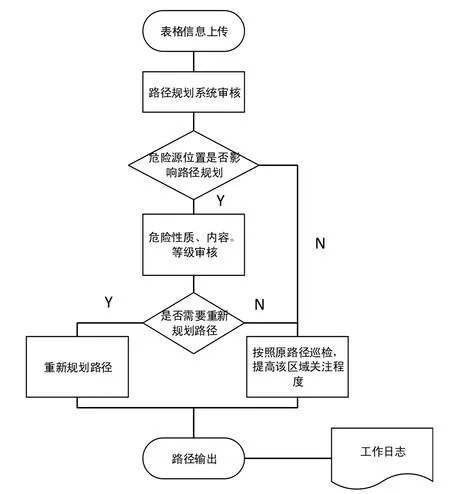
圖1 輸電線路危險源控制表與路徑規劃系統配合流程
2.3 空域環境安全的預先風險評估
空域環境的安全性既是單個航段機巡工作全過程風險控制的重要組織部分,也是確保整個巡檢區域空域審批工作順利開展的重要前提。需要確保的是,機巡計劃的使用空域與申請使用空域的類型、使用時間是否一致,在保證所使用空域均為申請空域的前提下,使空域申請計劃更加安全、合理、高效。由于人為失誤、地理環境等因素影響航空器在執飛過程中可能出現偏航,因此飛行前需要驗證飛行航跡與臨時作業空域是否有進入軍事禁飛區、限制區、飛行危險區、民航機場凈空區等危險區域的可能性,若航線規劃與危險區域有交集則應重新對航線進行調整規劃。非必要情況下,機巡作業航跡不得穿越人口密集區、危險要害區、電力特殊區域、重要建筑區等危險源區域;若航線有穿越的必要,應對危險源區域進行事故危險等級的評估,參照危險等級劃分表。
3 飛行過程風險控制
3.1 機巡作業飛行過程風險劃分
在劃分無人機飛行風險之前,需要根據當地地理環境、線路位置、空域規劃等多方面因素進行考慮,如揭陽夏秋間常受強熱帶風暴襲擊,有時因季風活動反常或寒潮侵襲,會出現冬春干旱或早春低溫陰雨天氣,所以在無人機巡查揭陽輸電線路時,需要有面對突發惡劣天氣的應急措施,才能將機巡作業風險處于可控水平,保證機巡作業安全性和可靠性。機巡作業無人機飛行過程風險劃分類別主要分為以下四類:地面人員不安全行為風險、無人機飛行環境風險、公共安全風險以及國家空域安全。風險出現的內在原因有無人機飛行故障、墜機、地面撞擊、空中撞擊以及無人機飛行過程損壞,而外在原因有干擾航空秩序以及進入軍事禁飛區、限制區、飛行危險區。事故的原因主要有無人機操作不當、數據鏈問題以及環境的復雜性,如起飛前未對無人機進行安全檢查、風力過大干擾無人機正常飛行以及無人機數據鏈路信號干擾等。
3.2 機巡作業風險等級矩陣
根據《民用無人駕駛航空器系統適航審定項目風險評估指南》(AC-XX-AA-2020-XX),評估無人機系統的產品風險等級,應當基于預期的運行場景,從能量等級和碰撞可能等級兩個維度綜合給出。
基于民用無人機系統自身的能量等級和運行環境的碰撞可能等級兩個維度,形成如圖2所示矩陣。其中,A區域為低風險;B區域為中風險;C區域為高風險。
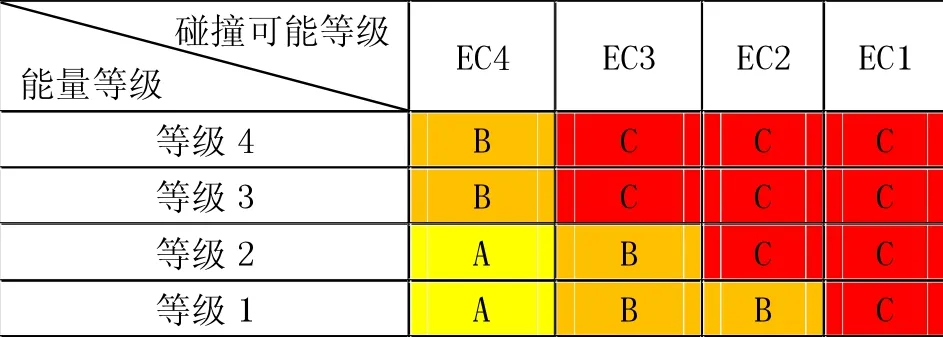
圖2 無人機飛行風險等級矩陣
3.2.1 能量等級
民用無人機系統的能量等級從動能角度出發,通過最大起飛質量和巡航速度來確定。計算公式為為最大起飛質量,v是巡航速度。根據動能數值進行分級,等級1為34千焦~1084千焦,等級2為1084千焦~8134千焦,等級3為8134千焦~67787千焦,等級4為67787千焦以上。
3.2.2 碰撞可能等級
民用無人機系統的碰撞可能等級通過要飛越的人口密度(例如,遠離人群、人口稀少、人口密集)和空域要求(例如,隔離區、完全融合等)來確定。
EC(Encounter Category)代表碰撞可能等級,其嚴重程度從EC4至EC1依次遞增,通過圖3所示流程來確定。
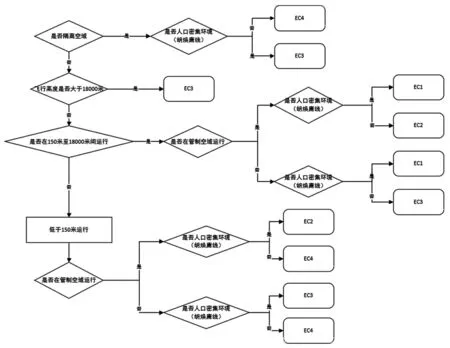
圖3 環境等級
3.3 機巡作業風險場景劃分
根據SORA內在的無人機地面風險是指地面人員被失控無人機擊中的風險,分為11個等級,由無人機擬運行場景、無人機的尺寸和動能指標確定。無人機的最大特征尺寸和預期的典型動能指標中,以先到達更高級的為準進行評估。具體如表2所示。
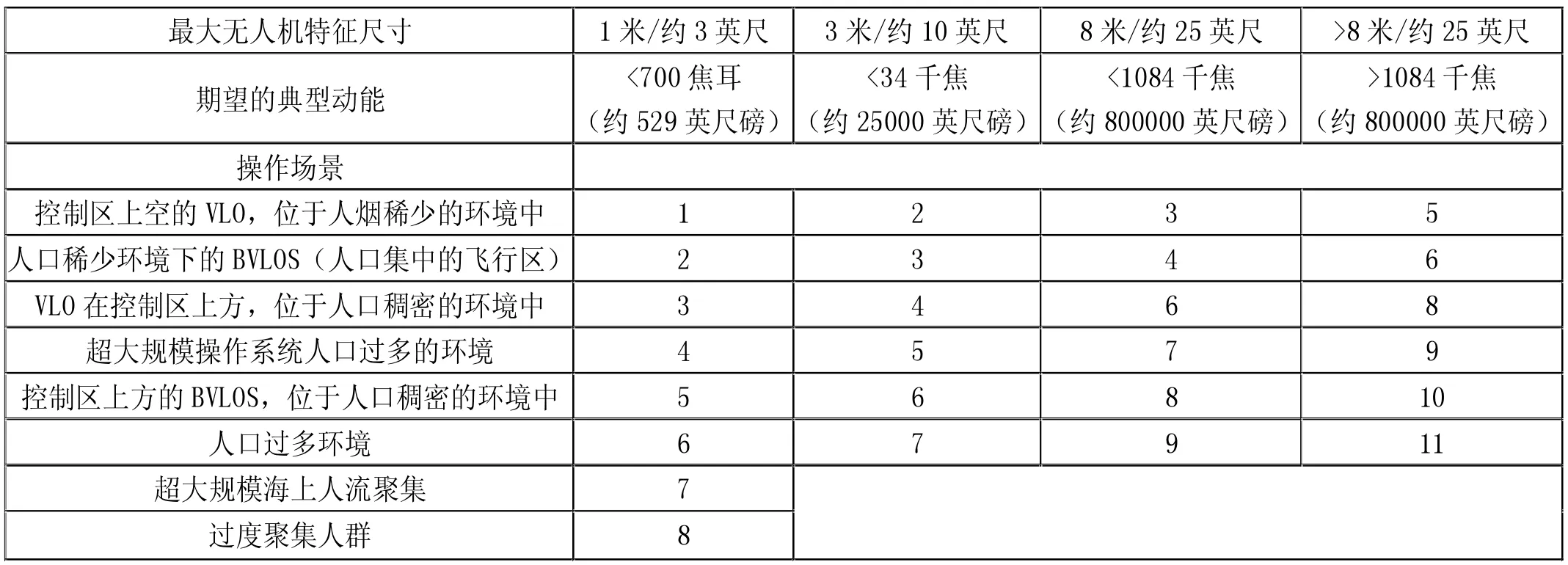
表2 固有無人機地面風險場景
在考察項目運行環境后,操作場景幾乎都是控制區上空的VLO,位于人煙稀少的環境中、人口稀少環境下的BVLOS(人口集中的飛行區),無人機固有風險等級在1~3中,屬于低風險,無人機墜機后,對地面人員傷害幾乎可以忽略不計,且風險可識別性高。
空域遭遇類別(AEC)是一組空域類型,最能反映感知的碰撞風險水平。如果無人機將在多個AEC空域運行,則需要對每個AEC進行評估,以確保在整個運行過程中存在可接受的碰撞風險。SORA中的非典型空域(非常低密度)定義如下:
(1)限制空域或危險區域:正常載人飛機不能飛行的空域(例如建筑物或構筑物400英尺范圍內的空域);在操作過程中,載人飛機的遭遇率(遭遇定義為水平接近3000英尺,垂直接近±350英尺)可顯示為每飛行小時低于1.0*10-6。
(2)不屬于第1至第11類空域會合類別(AEC)的空域:無人機飛行空域大部分屬于場景6,其飛行高度無法對有人機產生威脅,無人機自身路徑規劃,屬于單向循環,幾乎不可能發生無人機與無人機碰撞。因此,在無人機飛行沖突風險管控中,重點需要考慮無人機偏離路徑墜機風險,障礙物規避風險。
3.3.1 障礙物規避風險
機巡作業無人機飛行沖突的發生,根本原因為飛行路徑上障礙物的阻擋,所以如何規避障礙物則為風險管控的研究重點,在已有的多目標規劃和智能調度系統下,機巡作業無人機可以避免因路徑規劃而導致撞擊發生的事故。但在輸電線路交叉跨越點仍需要注意空中相撞的可能性,因機巡作業無人機巡查線路與輸電線路相符合,從宏觀上看為數條直線組成,因此可以在無人機上安裝激光測距傳感器,然后通過線性外推法的沖突預判算法來判斷是否沖突。
3.3.2 路徑安全風險管控
機巡作業時無人機可能偏離航線,或因路徑規劃失誤、意外情況,未經允許進入軍事禁飛區、限制區、飛行危險區等特殊空域,造成空域入侵事件發生,同時無人機數據鏈路信號干擾其他航空器正常作業。
對此情況可與民航局空管局航空情報服務機構合作,收集機巡作業路徑上的特殊空域管制區,并在特殊區域的空域障礙物限制面保護范圍數據基礎上,制作無人機空域網格圖,路徑規劃時,直接避開該區域。繪制方法為:以管制區域中心點為基準劃設空域網格,每個網格為1分緯度×1分經度,覆蓋整個管制區域。繪制結束后,將該區域信息上傳至路徑規劃系統作為參考數據。
在完成機巡作業安全路徑規劃后,無人機仍然有可能因意外情況闖入一些限制區域,如交通區域(機場、高鐵、公路)等,這時需要進行人為操作,修正無人機飛行路徑。因此需要設計實時告警系統。
(1)利用北斗導航系統和無人機衛星導航設備,將無人機自身設置為導航圓心,以垂直地面為參照物,設置安全水平間隔,將安全水平間隔作為安全屏障半徑R,在安全水平間隔內設置告警半徑Rd。無人機路徑告警系統范圍如圖4所示。
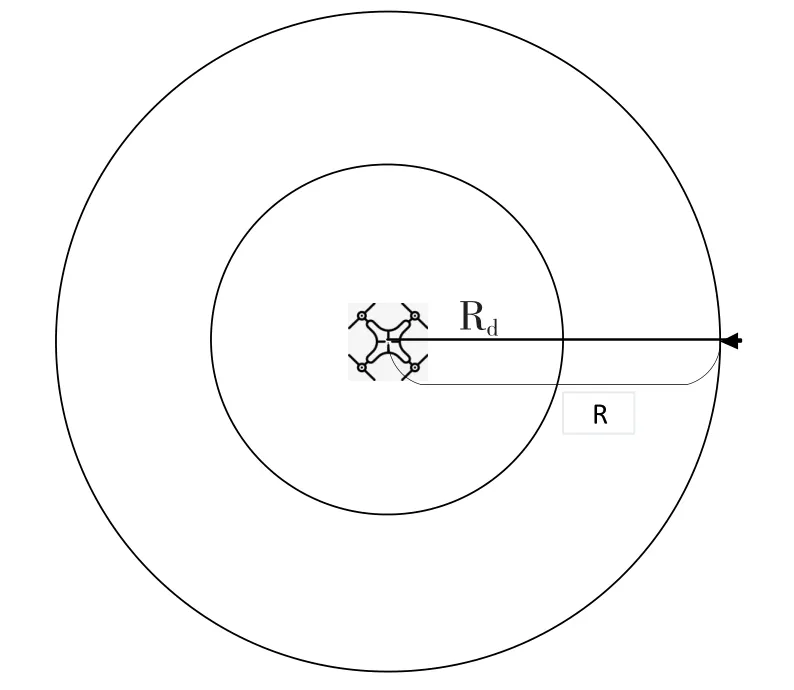
圖4 無人機路徑告警系統范圍
(2)衛星地圖,將無人機形式路徑上可能會闖入的交通區域(機場、高鐵、公路)等標出,設置網絡格柵警示邊界,當無人機安全屏障與網絡格柵警示邊界接觸時,自動觸發無人機路徑強制修正程序,同時給地面駕駛員或操作人員發出持續示警信息,提醒關注。程序運行時間上限為式(1)所示。

V為無人機水平飛行速度。
(3)當無人機路徑強制修正程序運行時間達到上限T時,無人機啟動安全降落預備時間T1,在時間T1內,必須由駕駛員或相關操作人員進行人為修正,倘若人為操作路徑修正不成功,且人為操作無法安全迫降,則由無人機打開降落傘,關閉運行電源。并發出實時位置信息,由地面人員聯系有關部門進行回收和事故處理。
4 飛行后風險統計分析
隨著無人機技術的發展,無論在性能上還是操作性、可靠性等方面都有了長足的進步,但仍不具備有人機的可靠性與安全性。通過對機巡作業任務完成后的相關數據進行分析,能夠使后臺風險管控人員對此次任務執行情況有清晰透明的了解,找出潛在不安定因素,評價任務完成效率、完成情況,然后與地面人員、相關部門溝通交流,采取措施消除不安定因素。通過飛行后風險管控,降低機巡作業風險水平,提高任務完成效率。利用任務完成評價表方法分析任務執行情況及相關因素數據,獲取各個因素對機巡作業任務影響的特點,提出有效的改善措施。因此,這就需要針對無人機完成機巡作業后,根據無人機自身飛行情況數據,地面人員對此次任務評價,后臺風險管理人員對任務完成情況評價進行調研分析,從而得到啟示,有針對性地提高機巡作業任務的安全性,降低其風險水平。
任務完成評價表及量化指標,首先任務完成評價表從三方面對此次任務進行調查分析:
(1)系統軟件分析無人機自身飛行情況數據,如飛行過程中傳感器是否正常,拍攝照片的清晰度是否符合要求,有無自身故障報告等。
(2)地面人員對此次任務工作環境等的評價。
(3)后臺風險管理人員任務全過程情況評價
評分標準按照與飛行前、飛行中以及飛行后各個因素、類別的相關程度劃分為幾個級別并進行量化表示,據此來進行加權分析,從而得出結論。
5 結束語
無人機作為智能化在民航領域的一種延伸技術,已經在全球引起廣泛關注,對無人機風險評估的研究也日益增多。本文在已有研究基礎上,通過風險管理矩陣,將所需要研究的內容劃分為了兩個方向,一個是時間維度方向,另一個是三個層面方向。從時間維度上來看,無人機巡線作業全過程主要是預先風險評估、過程風險控制及事后風險管理三個時間階段,預先風險評估主要在無人機尚未飛行時進行一些風險的測評,數據的收集,相關因素的分析;過程風險控制主要在過程中可能會遇到的一些狀況等等;事后風險管理主要在無人機著陸后,數據事件已經發生生成,則需要進行一些數據整理評估,量化總結。從三個層面上來看,無人機巡線作業則是從飛行沖突風險、公共安全風險、國家空域運行安全風險三個層面來分析風險因素。這兩個方向的內容有著密不可分的聯系,故此將它們之間的聯系也進行了一些闡述,希望可以構建立體化的機巡作業安全風險管理技術機制,最終形成無人機巡線作業飛行安全風險全過程管理方法,從而為無人機空中運行管理提供支撐。
猜你喜歡
世界最新醫學信息文摘(2021年12期)2021-06-09 08:37:56
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
商周刊(2018年23期)2018-11-26 01:22:28
故事大王(2016年7期)2016-09-22 17:30:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
中國衛生標準管理(2015年1期)2016-01-14 03:41:26
電測與儀表(2015年5期)2015-04-09 11:30:52
中國工程咨詢(2014年8期)2014-02-16 06:31:00
兒童故事畫報(2013年3期)2013-06-24 05:40:30
