3500噸敷纜船綜合電力推進系統關鍵技術應用
2021-08-23 02:52:40郝衛明劉文達
船電技術 2021年8期
郝衛明,劉文達
3500噸敷纜船綜合電力推進系統關鍵技術應用
郝衛明,劉文達
(武漢船用電力推進裝置研究所,武漢 430064)
為了提高某3500噸敷纜船綜合電力推進系統可靠性、智能化、系統冗余性能的技術指標,設計過程中采用了系統計算、仿真驗證等技術手段,在設備研制過程中采用了具有熱備冗余功能的智能化能量管理系統、智能化船舶機艙監控系統、大功率低速柴油發電機組冗余控制技術、變頻軟啟動器同步切換電流抑制技術等關鍵技術。所有技術指標在系泊航行實驗中得到驗證。
綜合電力推進系統 敷纜船 系統冗余 智能控制
0 引言
某3500噸級敷纜船采用的綜合電力推進系統,為艦船動力提供了一種全新智能化、冗余化的動力系統方案,屬于船舶電力推進技術領域。同現有敷纜船相比,該裝置綜合采用了電力推進方式,并具有DP-2動力定位能力。以及進行智能化。
眾所周知,我國海岸線全長約18000公里,沿海散布著眾多島嶼,這些島嶼在經濟、軍事、政治等方面具有重大意義,島嶼的電力供應、對外通訊關系著地方經濟發展、國家安全和政治穩定。近年來,由于環保及全球溫室效應影響,作為負責任的大國,我國大力發展可再生能源,特別是在可再生電能方面取得了長足發展,我國沿海淺灘及島嶼架設了大量的風電場、潮汐能發電場、太陽能發電廠,這些電能均需要通過海底電力電纜將電能輸送到岸基變配電站,在經過電網送到負荷端。敷纜船的成功運營對于島嶼供電電纜和通訊電纜的埋設、維修工程,海上再生能源輸送及維護具有重要的意義。
1 系統組成
3500噸級敷纜船綜合電力推進系統單線圖如圖1所示。敷纜船綜合電力推進系統實現全船的冗余化供配電、推進、動力定位及監測報警功能。根據功能劃分為4個分系統:供配電系統、推進系統、自動化系統及動力定位系統。供配電系統實現全船負載饋電和保護,供電系統額定電壓為690 V,額定頻率為50 Hz,其組成包括4臺2000 kW柴油發電機組、1臺300 kW柴油發電機組、1臺120 kW柴油發電機組、690 V主配電板一套、400 V輔配電板1套。推進系統為全船提供推進動力,可完成船舶敷纜作業、航行、進出港等工況,敷纜船配置了4套推進支路,每條支路包含了1臺推進移相變壓器、12脈動整流水冷型推進變頻器、一臺異步推進電機。自動化系統主要實現供配電系統的冗余化和智能化控制、監測報警等功能,包含了熱冗余功率管理系統,監測報警系統,以及智能化泵組管理系統。
本系統電站由多臺大功率柴油發電機組組成,單臺機組故障不影響系統功能,可靠性更高。采用冗余化低速大功率發電機組控制技術,精確控制機組轉速及電壓,提高供電系統穩定性。熱冗余的智能化能量管理系統,針對系統全船供配電設備采用控制策略動態優化的控制方案,提高供電安全性。配電系統可實現分區供電,對故障點進行隔離。保證供電連續性。
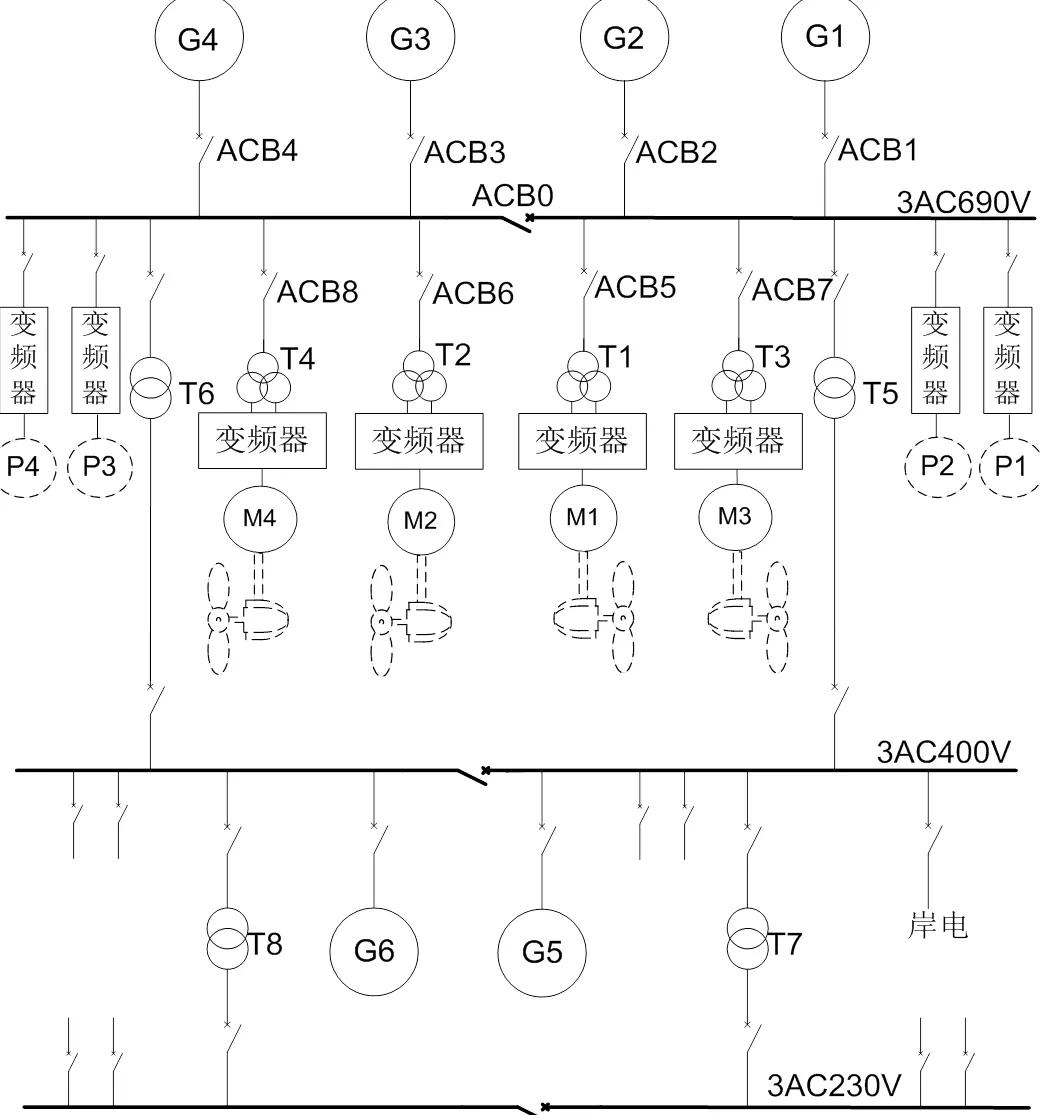
圖1 系統單線圖
2 主要技術特性及技術指標
2.1 主要技術特性
通過FMEA分析,該船推進系統配置4條推進支路,船舶艏艉異側支路通過推進電機、推進變頻器、移相變壓器連接到同一段供電母線,出現單點故障后,該裝置能夠保持設計條件下動力定位能力。主推進變壓器采用軸向分裂結構,兩組原邊線圈均采用延邊三角形聯結。兩條支路推進系統同時運行時,對變壓器前端電網相當于虛擬24脈波整流,四條支路同時運行時,對前端電網相當于48脈動整流,可大大降低變頻器對電網的諧波影響[1]。
智能化監測報警系統,采用基于移動終端的機艙設備運行狀態實時在線監控及狀態評估,以及基于移動通訊的遠程故障診斷及故障預測,進一步降低系統全生命周期的維護保養成本。
通過變頻軟起技術降低大功率電機啟動過程中沖擊電流,通過推力分配技術提高電網高負荷下系統穩定。
智能化監測報警系統,采用基于移動終端的機艙設備運行狀態實時在線監控及狀態評估,以及基于移動通訊的遠程故障診斷及故障預測,進一步降低系統全生命周期的維護保養成本。
通過變頻軟起技術降低大功率電機啟動過程中沖擊電流,通過推力分配技術提高電網高負荷下系統穩定。
2.2 主要技術指標
主要技術指標如下表:

表1 主要技術
3 關鍵技術的突破情況
3.1 系統冗余性及匹配性優化設計
敷纜船配置了具有DP-2附加標志的動力定位系統,對船舶的動力系統及其他系統提出來更加嚴格的冗余性要求,敷纜船為了取得DP-2的附加標志,必須進行FMEA分析,FMEA分析內容涵蓋了所有與動力定位系統相關的設備和系統,經過合理功能劃分及深入詳細的系統分析,確保各系統能夠對單點故障進行有效而快速的隔離,在不增加成本的前提下,確認系統設計滿足DP-2的要求。采用國產化供配電系統、監控報警系統、推進系統,具備DP-2動力定位能力的大功率敷纜船。
針對敷纜船特點,采用供電設備分區管理、配電系統分區供電、推進系統冗余布置的設計方式提高了系統的供電連續性、可靠性和動力定位能力。
敷纜船采用分區供電,各段690 V母排連接兩臺主發電機組,各分區互為備用,實現連續供電。機組出現單機故障時,可由同一母線的備用機組為該母線提供電能,保證系統持續供電[2]。
敷纜船配置了四條推進支路,四臺推進器分布在船艏和船艉的左右舷兩側,并且艏艉異側的推進器連接在同一端母線上,保證了單故障點狀態下船舶姿態保持,滿足設計海況下,單點故障發生時DP-2定位能力的要求。

圖2 推進系統冗余設計
動力定位功能的實現,需要供配電系統、推進系統共同完成,多個系統之間的優化控制和系統參數匹配技術尤為重要。敷纜船在作業狀態下,電力系統負載會發生較大范圍的波動,在船舶功率管理系統的控制下,在確保船舶作業安全的前提下,進行動態負載控制,以增強船舶電力系統穩定性。本船采用基于動態負載控制方法的船舶推力分配方式,進一步打通了PMS系統和DP控制系統之間孤島效應,形成了結合功率管理的組合偏置推力分配方法。當負荷波動量大于閾值時,功率管理系統首先將機組控制模式切換為同步均衡控制模式,再向DP控制系統發出推力組合偏置信號,推進器通過偏置的推進器功耗用來緩沖其他負載的功率突降,維持電網穩定[3]。
本船突破了動力定位系統、供配電系統系統、推進系統之間系統控制策略優化和系統參數匹配的關鍵技術。突破供配電系統、機艙監測報警系統、能量優化管理系統、推進系統動力定位系統的冗余化設計關鍵技術。此功能的開發,為后續具有動力定位能力的工程船舶的提供了設計參考依據。
本項目進行了系統冗余化和匹配性設計,采用國產化供配電系統、監控報警系統、推進系統,具備DP-2動力定位能力的大功率敷纜船。
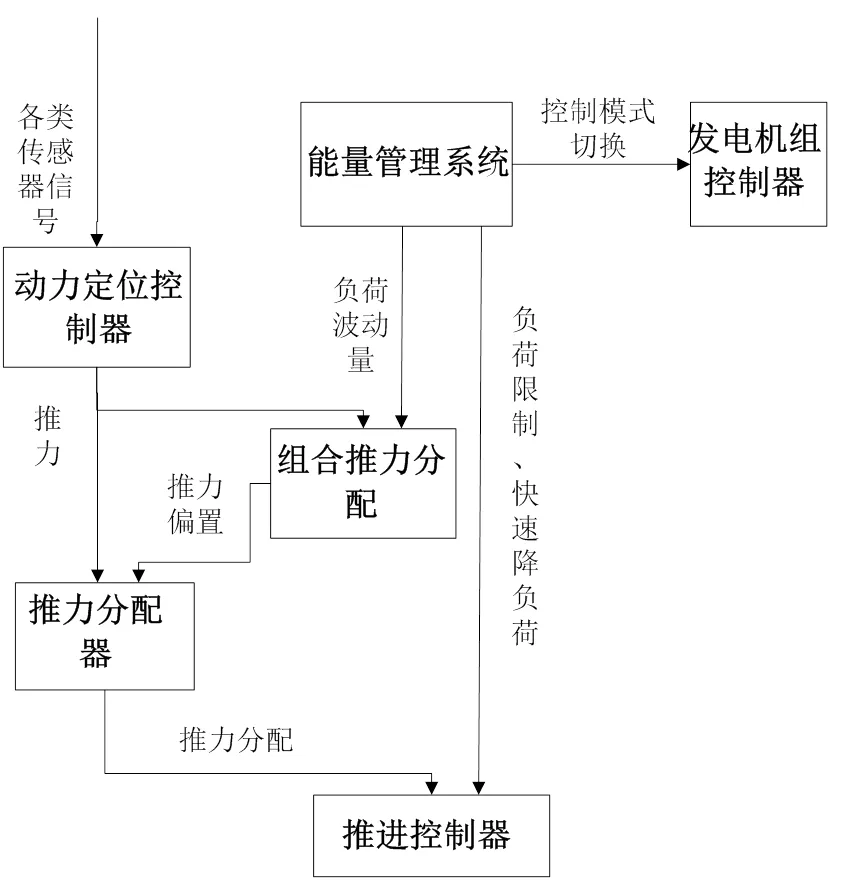
圖3 動態推力組合分配原理圖
3.2 低速大功率發電機組冗余控制技術
目前大多數電力推進船舶采用高速發電機(一般采用6極或4極電機),發電機組轉速及穩定較高,僅配置單獨的機組控制器。本船受制于成本限制,采用大功率低速發電機組(10極電機),為了保證供電系統可靠性,保證供電連續性,本船配置了兩套機組控制器,并且采用了兩種控制器,實現了下垂模式和同步均衡模式下機組的啟停、同步并車、解列、負荷分配、監測報警等功能,兩種控制器可實時進行切換,兩套控制器分別通過獨立通訊網絡接入PMS系統。通過能量管理系統或者操作人員手動切換的方式,控制機組實現增減機、負荷均衡等操作。在正常狀態下,機組工作于有差調節或者恒頻調節模式下,若當前控制方式出現故障,系統會通過自動或者手動方式進入另一種控制方式。
在下垂控制模式下,實現了機組基于模擬量和數字通訊方式的負荷均衡模式。并能實時自動切換。本船突破了大功率低速發電機組雙控制冗余控制與控制器實時切換技術,同時突破了下垂模式下負荷分配系統的冗余控制和實時切換的關鍵技術。

圖4 機組冗余控制著原理圖
3.3 智能化熱備冗余PMS
按照船規要求,DP-2的船舶,在出現單個故障(不包括一個艙室或幾個艙室的損失)后,可在規定的環境條件下,在規定的作業范圍內自動保持船舶的位置和艏向。對于PMS來講,應對分斷的母線分別設置獨立的PMS系統[4],或者采用冗余的控制器,單個的PMS控制器故障不至于影響其他PMS控制器。本船采用熱備冗余的方式,配置兩套控制器,兩套機組控制器和現場I/O設備接入兩套獨立的通訊網絡,兩套控制系統同步運行,當其中一套主控制器出現故障時,在100 ms內可無縫切換至另一臺控制器運行。

圖5 智能輔助操作模塊工作流程圖
PMS系統同時對動力系統主要設備進行了實時監控,利用智能輔助控制系統,對動力系統設備進行實時的狀態評估和故障診斷,并依據設備實時狀態優化PMS控制策略,實現機艙設備可靠、高效、穩定的運行。
首次采用具有熱備冗余功能的智能化能量管理系統,實現了系統控制策略優化、設備狀態評估、在線故障診斷、全生命周期管理。本船突破了PMS的熱備冗余控制技術,同時突破了PMS基于系統設備狀態感知的優化控制技術,實現了PMS系統與人工智能技術的深入融合,PMS系統更加智能化,船舶電力系統系統運行更加穩定、節能環保。
3.4 智能化機艙監測報警系統
敷纜船采用智能化機艙監測報警系統,系統采用冗余化設計,系統中配置多臺無線路由器和手持式無線終端,機艙操作人員通過手持式無線終端可是實時讀取機艙監測報警數據,便于對機艙各設備的實時監控,同時監控系統接入互聯網,可以通過移動通訊網絡或衛星寬帶與故障診斷中心實時通訊,并上傳機艙監測報警數據,故障診斷專家通過實時上傳的參數和信號,對機艙各設備進行在線式遠程故障診斷[5]。
機艙監測報警系統采用冗余通訊接口,通過以太網進行實時同步通訊、兩條獨立的通訊網絡同時工作,一旦其中一條通訊網絡發生故障,另一條網絡仍能進行數據通訊,保證系統正常運行。
本船監測報警系統突破了實時在線診斷技術,實現了監測報警系統的智能化和冗余化設計,便于系日常維護和操作。
3.5 變頻軟起同步電流抑制
敷纜船配置了4臺315 kW的高壓沖水泵組,為了較小系統諧波,保證電網供電質量,高壓沖水泵采用變頻軟啟動方式啟動泵組。變頻軟啟動器軟啟動完成后,采用鎖相環對交流電網電壓進行鎖相得到相位、幅值,并對交流電網采樣電壓進行濾波相位、幅值等補償后,將反電勢與交流電網電壓相位差作為轉速給定值的附加控制量,將反電勢與交流電網電壓幅值差作為磁鏈給定值的附加控制量,以調節輸出電壓相位和幅值使相位差、幅值差減小到可接受的動態區間。
本技術突破了變頻軟啟動器在切換過程中的大電流抑制技術包括電動機反電勢與交流電網電壓相位差、幅值差補償算法和主開關合閘延時預測補償處理。實現了切換過程中電流抑制,同時降低了電網諧波,提高了電網品質。
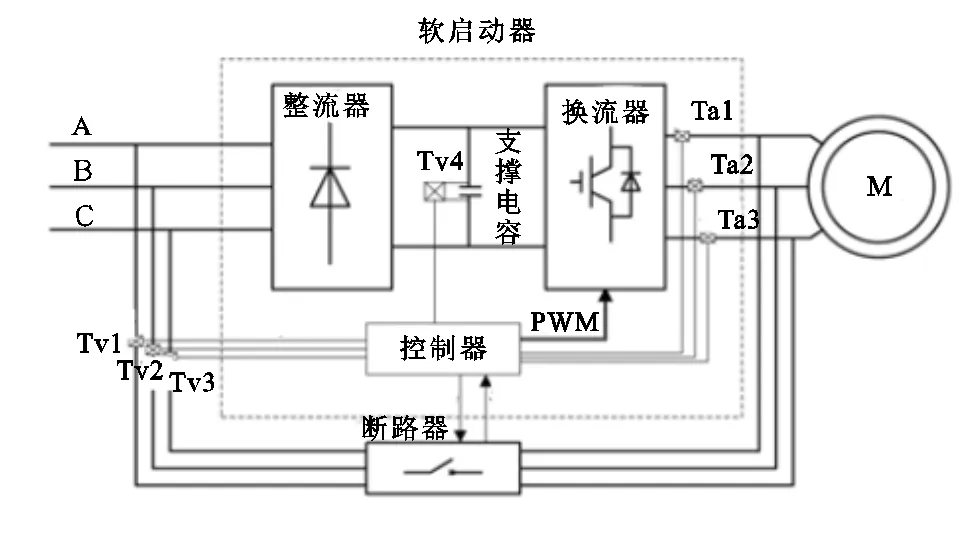
圖6 變頻同步軟起電流抑制原理圖
4 結束語
該項目已經順利完成系泊航行試驗,并順利交付船東使用,圓滿達到預期效果。敷纜船交付后,進行了多次作業,我所裝備運行狀態良好,期間未出現任何故障,保證了敷纜任務的順利進行。
本系統集成了DP-2動力定位系統的敷纜船,采用系列化標準變頻器和電機,對于以后類似的電力推進系統設計制造都提供了寶貴的經驗和教訓。敷纜船的成功投入運行進一步刺激沿海島嶼經濟發展,提高海洋可再生能源的利用率,促進全球信息聯通及全球電能聯網的發展。
[1] 孫玉偉, 潘天雄, 嚴新平. 24脈波移相整流變壓器技術研究綜述[J]. 武漢理工大學學報(交通科學與工程版), 2019, 43(3): 438-442.
[2] 竇曉峰, 金奎. 海洋平臺新型配電網絡研究[J]. 船電技術, 2017, 33(9): 20-23.
[3] 王琪瑋, 微電網負荷預測及運行控制方法研究[D]. 沈陽: 沈陽工業大學, 2013.
[4] 柯常國, 王勁, 楊俊飛. 電力推進船舶功率管理系統設計與研究[J]. 船電技術, 2013.9, 37(7): 17-21.
[5] 時永鵬. 船舶主要要素的智能化設計系統開發[D]. 上海: 上海交通大學, 2013.
Application of Key Technologies in Integrated Electric Propulsion System of a certain 3500 Tons Cable layer
Hao Weiming, Liu Wenda
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
U664.14
A
1003-4862(2021)08-0048-05
2020-12-31
郝衛明(1988-),男。職稱:工程師。研究方向:船舶電力推進。E-mail: 15827524739@qq.com
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
印刷工業(2020年4期)2020-10-27 02:45:52
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國交通信息化(2017年4期)2017-06-06 07:21:52