燃料電池動力供氧系統仿真操控軟件設計與實現
2021-08-23 02:52:36李彬彬徐紀偉謝仁和馬金保
船電技術 2021年8期
李彬彬,徐紀偉,謝仁和,馬金保,孔 昕
燃料電池動力供氧系統仿真操控軟件設計與實現
李彬彬1,徐紀偉1,謝仁和1,馬金保2,孔 昕1
(1. 中國船舶科學研究中心,江蘇無錫 214082;2. 寧夏工商職業技術學院,寧夏銀川 750021)
以燃料電池為動力的水下作業平臺供氧系統的實際訓練存在一定的局限性和危險性,并且培訓難度大,訓練成本高。本文以某型使用燃料電池為動力的水下作業平臺為對象,結合供氧系統的模擬訓練需求,以Visual Studio 2015軟件作為集成開發工具,采用C#語言,以GDI+為輔助工具編寫仿真儀表和閥件,實現了水下作業平臺燃料電池動力供氧系統的軟件操作界面設計和功能仿真,并對設計的仿真系統進行了系統操作和功能測試,結果表明,該仿真操控軟件能基本實現系統操作功能,反應供氧系統的工作情況和實際動態過程,具有良好的人機交互界面和實用性,此外,其對提高操作人員水下作業平臺燃料電池動力供氧系統的操作水平有一定的積極作用。
水下作業平臺 供氧系統 仿真 操控軟件
0 引言
近年來,水下作業裝備得到快速發展,而燃料電池技術得益于其能量密度高、接近零排放的良好性能,使之在水下裝備動力系統方面成為研究熱點。
燃料電池動力系統供氧分系統,是水下作業平臺的重要組成部分。該系統的操作失誤,輕者會導致動力系統失效,更為嚴重的會直接危及水下作業平臺和人員安全。因此,對該系統的操作熟練程度不僅是動力系統可靠運行的保證,更是有效提高水下作業平臺的安全性的重要保障,此外,由于液氧本身具有一定的危險性,因此,若對水下燃料電池供氧系統進行實際訓練,存在很大的局限性和危險性,并且培訓難度大,訓練及維護成本高。
本文以某型使用燃料電池為動力的水下作業平臺為對象,建立供氧系統的數學模型[1,2],以Visual Studio 2015軟件作為集成開發環境,運用C#編程語言,設計開發系統參數設定界面、供氧系統軟件操控界面等,并對開發的仿真操控軟件進行操作及功能測試。
1 系統組成
以燃料電池為動力的水下作業平臺供氧系統的主要功能是為燃料電池電堆工作提供其所需的氧氣,供氧系統流程圖如下圖1所示,其主要由液氧罐、液氧汽化器、管路及其它閥件組成[3]。供氧系統工作時,通過自增壓的方式對液氧罐內的氧氣壓力進行增壓,罐內增壓后的氣氧將液氧壓至液氧汽化器之后,通過液氧汽化器汽化后供燃料電池使用。此外,為了保證整個系統的用氧安全,供氧系統中還設置了溢流及超壓排放功能。
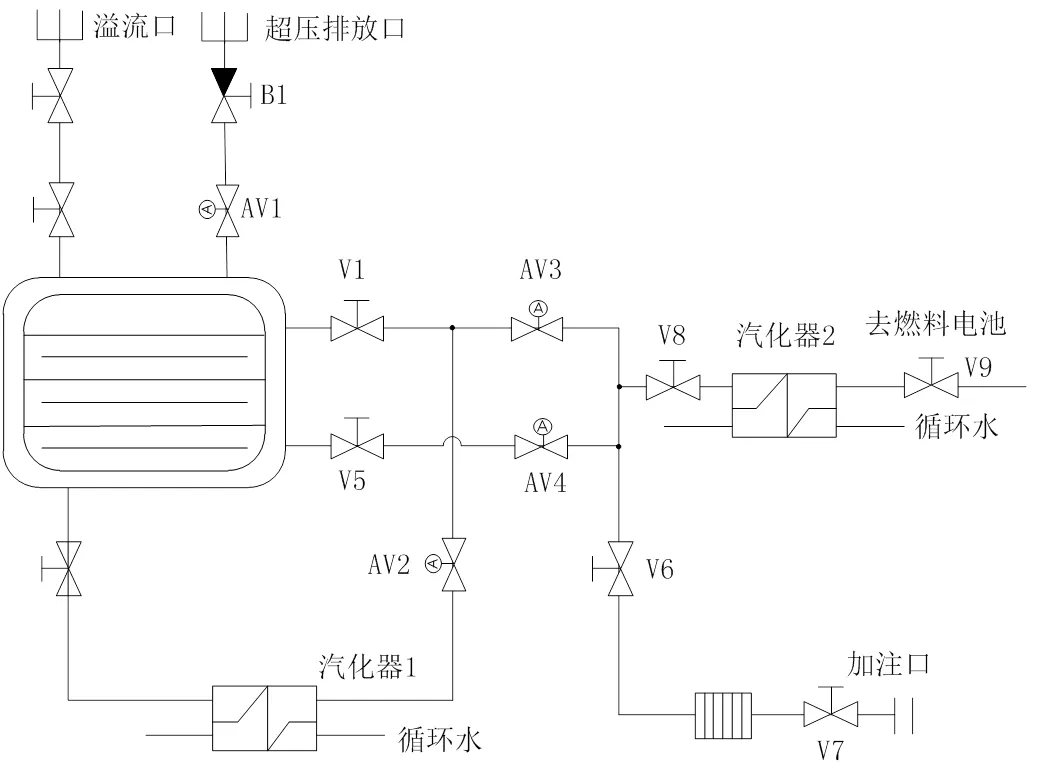
圖1 深海作業平臺供氧系統原理圖
2 數學模型
2.1 液氧罐模型
水下作業平臺采用高真空多層絕熱液氧儲罐,在工作時,通過引出少量的液氧進行汽化增壓,汽化增壓后的氣氧進入液氧罐的氣相空間,在壓差的作用下,為燃料電池提供其所需的氧氣。為了盡可能地降低儲罐中的液氧和氣氧相互影響,對液氧罐中的液氧和氣氧分別建模。根據氣氧質量守恒方程[4]可得:

液氧質量變化方程為:


根據氣體狀態方程,液氧儲罐氣相空間的狀態方程可以表示為[5]:

式中,P、mV、分別為液氧儲罐氣相空間氣氧的壓力、質量、體積和溫度;為氧氣的氣體常數。
2.2 液氧汽化器模型
液氧汽化器本質上可以看做一個換熱器,其主要作用是通過進入液氧汽化器中的循環水對進入液氧汽化器中的低溫液氧進行加熱,使低溫液氧汽化變為氣態氧。在本系統中,液氧汽化器主要有增壓作用和動力供液汽化作用,雖然用途不同,但其本質都是通過用循環水對液氧加熱汽化來實現的,因此,可以通過液氧汽化器的熱平衡方程,建立其數學模型。
在循環水側單位時間內蓄熱量的變化=單位時間內循環水帶來的熱量-單位時間內循環水傳給液氧的熱量,其循環水側的熱平衡方程[6]如下:

氧側單位時間內側蓄熱量的變化=單位時間內循環水傳給液氧的熱量-單位時間內液氧汽化帶走的熱量,其氧側的熱平衡方程如下:

式中,T為循環水出汽化器的溫度;W為循環水側的熱容量;m為汽化器中循環水的質量流量;C為循環水的比熱;T為循環水進汽化器的溫度;T為對數平均溫差;為熱阻;T為氣態氧出汽化器的溫度;W為汽化器氧側總的熱容量;m為氣態氧流出汽化器的質量流量;為氣態氧的比熱;T為液氧進入汽化器的溫度;m為液氧流入汽化器的質量流量;為液氧的比熱。
2.3 管路模型
1)串聯管路
在液氧系統中有段串聯管路,其阻力系數分別為1,2,…n,其壓力損失分別為,,…,總的壓力損失為,則串聯管路總的壓力損失可由如下方程表示[7]

2)并聯管路
在液氧系統中有段串聯管路,其阻力系數分別為1,2,…m,其壓力損失分別為1,Δ2,…Δ,總的壓力損失為Δ,則并聯管路總的壓力損失可由如下方程表示

2.4 氣動閥模型
在流體管道中,氣動閥可以看做一個節流元件,根據流體的連續性定律可知,氣動閥的的流量方程可表示為[8]:
式中:為標準狀態下的氣體流量;為額定流量系數;1為閥前絕對壓力;2為閥后絕對壓力;氣體平均壓力;為氣體比重,空氣=1。
3 仿真操控軟件設計與實現
3.1 操控軟件架構設計
軟件架構設計在整個軟件開發過程中不可或缺的一部分。在水下作業平臺燃料電池動力供氧系統中,由于存在的模型較多,需要操作和顯示的變量較多,因此,為充分降低數據存取顯示與數據處理、邏輯模型計算的耦合度,保證開發軟件的可擴展性強,本文采用三層架構軟件設計思想[9],三層的組成與相互關系如下圖所示。
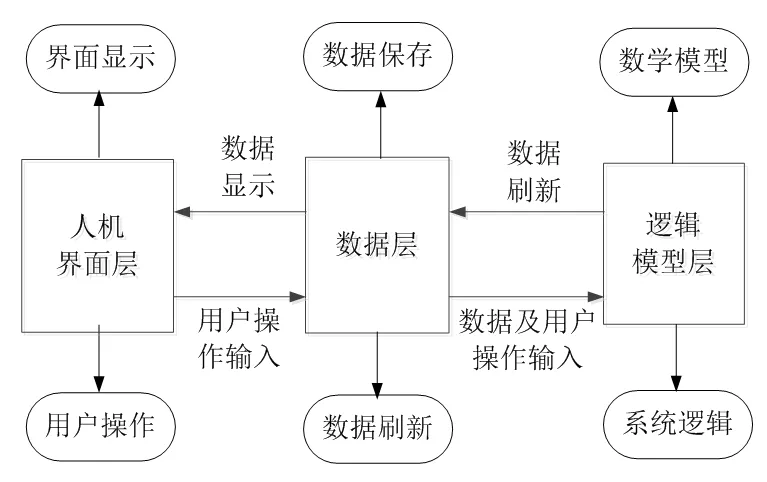
圖2 三層架構軟件設計結構
供氧系統三層架構各層的職責分配如下:
人機界面層:用于接受用戶輸入的數據(如閥的操作、參數設置等),并將邏輯模型層處理后的數據結果通過界面顯示給用戶。
邏輯模型層:根據相應的規則負責對整個系統中數據進行處理,本系統中的規則主要表現在兩個方面,第一方面是系統中各個主要設備的數學模型,通過調用各個設備的數學模型庫進行數據處理,另一方面是根據系統的工作原理形成的動作邏輯,來滿足對系統工作原理要求和功能要求。
數據層:用于實現對數據的實時保存和讀取操作。在該軟件中定義了一個DataCenter的數據類,通過實時刷新模型及邏輯處理后的數據,來更新每個狀態下的數據變量。
水下作業平臺燃料電池動力供氧系統操控軟件的具體架構如下圖所示。

圖3 供氧系統軟件架構
3.2 仿真操控軟件設計
供氧系統操控軟件一共有3個界面:分別是系統切換界面、參數設置界面以及系統仿真操控界面。本仿真軟件的開發基于Windows環境下的Visual Studio 2015軟件作為集成開發環境,以C#為開發語言,從而實現供氧系統的整個仿真過程,其主要設計步驟有:基于GDI+專業控件的開發,設備數學模型的建立和程序化,軟件操控界面設計,系統邏輯模型設計,編寫各個類的屬性、方法以及事件處理程序等[10,11]。
1)系統切換界面
圖1為供氧系統切換界面,在該界面上不僅可以對參數設置界面和系統仿真操控界面進行切換,還可以啟動、暫停仿真軟件,并對系統運行時間,運行狀態進行顯示,當點擊參數設置界面按鈕時,進入該界面,點擊Back按鈕,返回至切換界面。
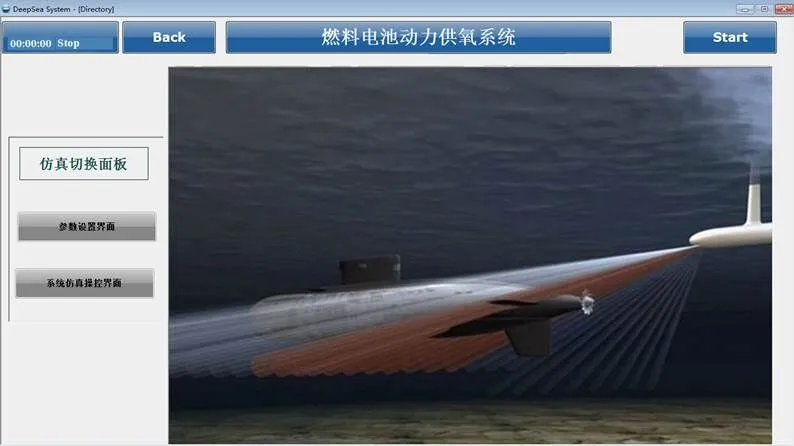
圖4 供氧系統切換界面
2)參數設置界面
參數設置界面如下圖所示,在本界面可以設置艙內的一些環境參數,如艙室溫度、艙室壓力、氧氣濃度等,還可設置海水深度和海水溫度。

圖5 參數設置界面
3)系統仿真操控界面
系統仿真操控界面如下圖所示,本界面為供氧系統仿真操控軟件的核心界面,在本界面上包括了兩個液氧罐,四個液氧汽化器,八個氣動閥,八個氣動閥運行指示燈,以及系統其它閥件和旋鈕等。在本界面中,實現了液氧罐的增壓功能、加注功能、供氧功能以及超壓排放功能等,此外,根據不同的操作位置,分別設置了手動操作模式和自動操作模式,并對系統中的相關壓力、流量參數進行實時顯示。
4 仿真操控軟件的操作與測試
水下作業平臺燃料電池動力供氧系統操控軟件需要實現的操控功能有:液氧加注功能、液氧罐自增壓功能,超壓排放功能以及穩定供氧功能,其中穩定供氧功能有兩種控制模式:分別是手動模式和自動模式。由于在穩定供氧過程中涉及了液氧罐自增壓功能以及超壓排放等功能,此外,在軟件設計過程中自動供氧模式是設計的重點和難點。因此,下面主要對仿真軟件的基于自動模式下的穩定供氧功能進行功能測試,系統的主要設置參數具體如下表1:
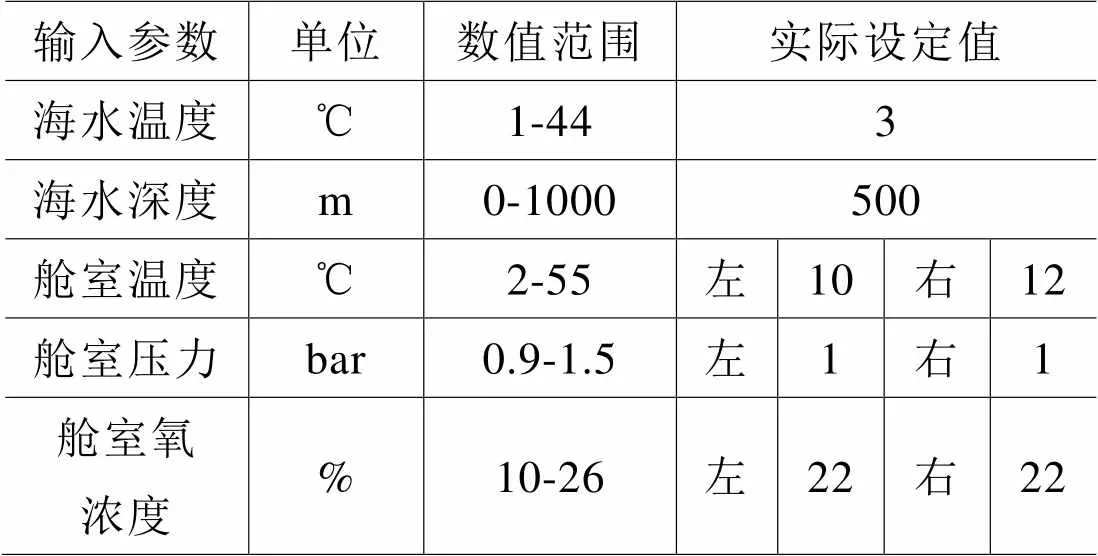
表1 系統設置相關參數
供氧系統要保證穩定供氧,液氧罐的壓力控制策略就顯得尤其重要,整個液氧罐的壓力控制流程如下圖所示,當罐內氣氧壓力低于正常工作壓力范圍,增壓氣動閥VG2自動開啟,當罐內氣氧壓力在正常工作范圍內時,增壓氣動閥VG2關閉,供液氣動閥VG4開啟,當罐內氣氧壓力高于正常工作壓力范圍內時,增壓氣動閥VG2保持關閉,供液氣動閥VG4保持開啟,當罐內氣氧壓力超過高壓報警值時,超壓排放單向閥自動打開。
下面對系統具體的仿真操控測試進行說明,首先進入參數設置界面,對左右艙的相關環境參數和海水深度、溫度等參數進行設置,然后,進入系統仿真操控界面,點擊界面右上角的啟動按鈕,將面板上的“手動/自動旋鈕”旋至自動模式,“自動運行”指示燈亮,并且面板上有VG1至VG8氣動閥的運行指示燈,當某一個或某幾個氣動閥運行時,其相應的運行指示燈變亮。此時,表示供氧系統不能通過現場的手動閥進行操作,只能根據系統中設定的壓力控制策略對VG1至VG8進行自動控制,因此,此時V1至V10這些手動閥處于打開的狀態,水浴汽化器的循環水進出口閥也處于開啟狀態,系統自動檢測液氧罐氣相空間的氣氧壓力狀態,并結合液氧罐的壓力控制策略來實現燃料電池動力系統的自動模式下的穩定供氧功能,并且通過不同的操作,對供氧系統中的相關參數進行實時顯示,系統運行后的仿真操控界面如下圖所示。
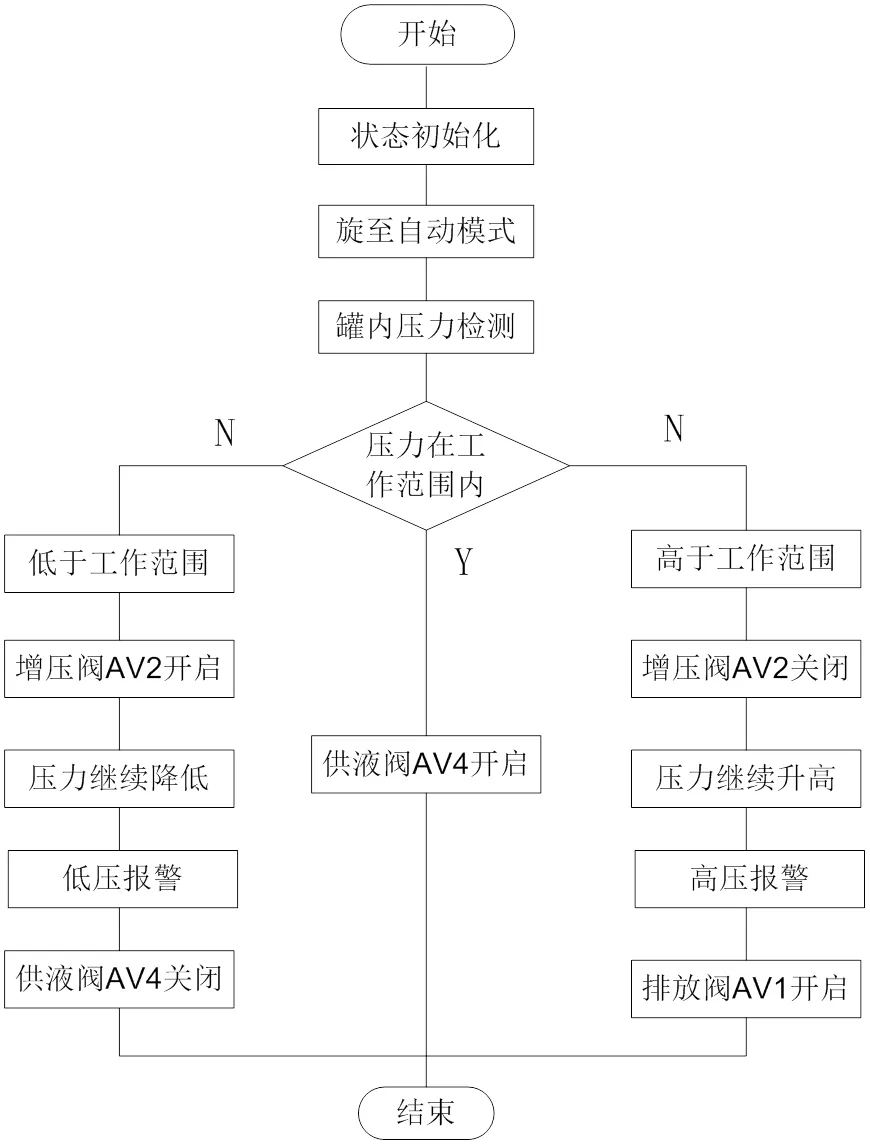
圖7 液氧罐的壓力控制流程
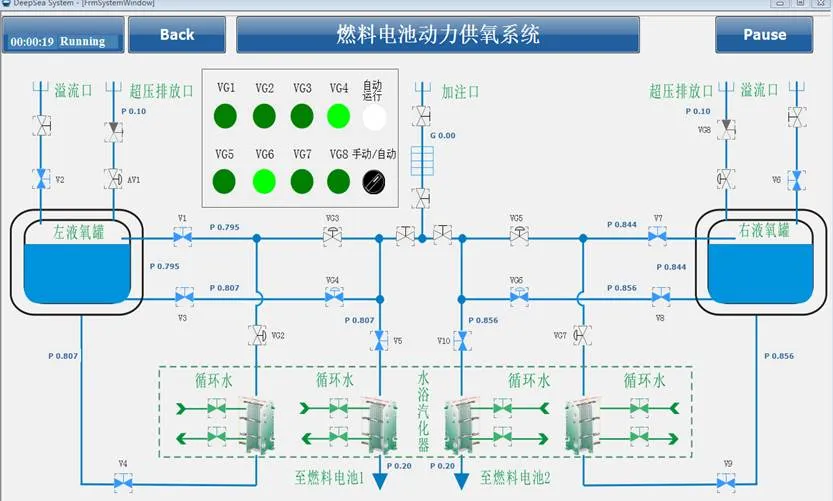
圖8 運行后系統仿真操控界面
5 結論
1)通過對某型使用燃料電池為動力的水下作業平臺的供氧系統仿真操控軟件的設計,不僅能夠實現對相關操作人員的操控培訓訓練,還有效避免了氧系統培訓中存在的安全風險。
2)本仿真操控軟件不僅實現了整個供氧系統的相關功能,還通過GDI為輔助工具編寫了系統中所需的專業仿真儀表和閥件,使得該軟件能夠較好的反應供氧系統的工作情況和實際動態過程。
3)本文為液氧與燃料電池在深海的匹配應用及以燃料電池AIP為動力系統的深海裝備相關的供氧系統可視化監控、壓力控制策略具有一定的現實意義。
[1] 楊修東, 存存, 王文. 液氧貯箱自生增壓過程中氣枕狀態分析[J]. 上海航天, 2014, 4(31): 59-63.
[2] 張超, 魯雪生, 田麗亭. 火箭低溫液體推進劑增壓系統數學模型[J]. 低溫與超導, 2005, 33(2): 35-38.
[3] 李彬彬, 孔昕, 張杰, 等. 深海作業平臺燃料電池AIP液氧系統供氧仿真分析[J]. 船海工程, 2018, 3(47): 158-163.
[4] 何長勇. 基于以太網的LOX遠程加注控制技術研究與實現[D]. 西安: 西安電子科技大學, 2013.
[5] 劉瑞敏. 氫氧發動機試驗臺自動增壓控制系統[D]. 哈爾濱: 哈爾濱工程大學, 2012.
[6] 丁睿, 唐建文, 董威. 電力推進船舶中央冷卻系統動態特性建模及控制仿真[J]. 制冷與空調. 2006, 6(5): 99-102.
[7] 呂博, 甘輝兵, 盧光松, 等. 船舶動力空氣壓縮培訓仿真系統設計研究[J]. 計算機仿真, 2017, 8(34): 233-238.
[8] 中國標準出版社. 氣動調節閥: GB/T4213-92[S]. 1993.
[9] 林開進, 李彬彬.船舶變頻海水系統仿真軟件設計與實現[J]. 上海海事大學學報, 2017, 2(38): 66-71.
[10]沈智鵬, 張張寧, 王海偉, 等. 大型集裝箱船舶輔鍋爐仿真系統的研究[J].系統仿真學報, 2014, 26(10): 2345-2350.
[11]張寧, 沈智鵬, 劉繼中, 等. 基于半實物的船舶燃油凈化仿真系統研究[J]. 系統仿真學報, 2015, 27(9): 2044-2048.
Design and Implementation of Simulation Control of Fuel Cell Oxygen Subsystem
Li Binbin1, Xu Jiwei1, Xie Renhe1, Ma Jinbao2, Kong Xin1
(1. China Ship Scientific Research Center, Wuxi 21408, Jiangsu, China;2. Ningxia Vocational Technical College of Industry And Commerce, Yinchuan 750021, Ningxia, China)
TM911.3
A
1003-4862(2021)08-0025-05
2021-03-03
李彬彬(1989-),男,工程師。研究方向:載人潛器動力及電力系統。E-mail: 18261550010@163.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2020年13期)2020-08-24 08:22:02
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
制造技術與機床(2017年5期)2018-01-19 02:49:17
家庭影院技術(2017年9期)2017-09-26 03:41:45
濰坊學院學報(2016年2期)2016-12-01 13:00:11
故事大王(2016年7期)2016-09-22 17:30:08
新聞傳播(2015年11期)2015-07-18 11:15:04