幾何折疊綜述
2021-08-24 06:53:20栗菲旋孫紅巖孫曉鵬
小型微型計算機系統(tǒng) 2021年8期
關鍵詞:結(jié)構(gòu)模型
栗菲旋,孫紅巖,孫曉鵬,2
1(遼寧師范大學 計算機與信息技術(shù)學院計算機系統(tǒng)研究所,遼寧 大連 116029)
2(北京郵電大學 智能通信軟件與多媒體北京市重點實驗室,北京 100876)
1 引 言
近年來,幾何折疊已經(jīng)成為計算機圖形學領域中的研究熱點,在工業(yè)結(jié)構(gòu)設計[1]、機器人設計[2]、醫(yī)療器械設計[3]、生物模擬[4]和航空航天[5]等工程領域應用廣泛.本文針對近年來幾何折疊領域的相關算法和理論梳理分類,根據(jù)折疊的對象不同,將幾何折疊技術(shù)分為桿折疊(1D)、平面折疊(2D)和三維折疊(3D)3類,分別介紹各算法思路和特點.最后從3個應用領域介紹幾何折疊技術(shù)的應用情況,總結(jié)發(fā)展趨勢和潛力,為未來的研究工作提供方向.
2 背景介紹
三維模型的幾何折疊是指折疊對象從無組織的通用狀態(tài)開始,到結(jié)構(gòu)化的折疊狀態(tài)結(jié)束的連續(xù)運動過程.根據(jù)折疊對象不同,可以將幾何折疊技術(shù)分為3類:桿折疊、平面折疊和三維折疊,如圖1所示.通過整理近年來幾何折疊的相關文獻,本節(jié)分別介紹3類幾何折疊的背景.

圖1 幾何折疊分類圖
2.1 桿折疊
桿折疊基于平面連桿結(jié)構(gòu)[6],通過其活動的關節(jié)在不自交的約束下進行折疊運動,多應用在機器人手臂[7]和蛋白質(zhì)折疊[8]中.平面連桿結(jié)構(gòu)是位于平面中的固定長度的一維段的集合,這些段在其端點處連接以形成連接的圖(如圖2所示).端點處統(tǒng)稱為關節(jié),關節(jié)允許360°旋轉(zhuǎn).在將一個或多個關節(jié)固定到平面上的情況下,任何特定的自由關節(jié)的運動都會受到連桿結(jié)構(gòu)的限制.

圖2 平面連桿結(jié)構(gòu)[6]
2.2 平面折疊
平面折疊是指該折疊運動僅考慮折痕的位置和折疊角度,不需要考慮材料厚度,通常為紙折疊.根據(jù)折疊需求可分為折痕設計、自折疊路徑規(guī)劃和切割折疊.
不同的折痕設計會造成不同的折疊結(jié)構(gòu),折痕形式可分為直折痕和彎曲折痕,分別適用于剛性折疊和彎曲折疊.
自折疊折紙技術(shù)是通過對折疊材料施加刺激,將自身沿著有效的折疊路徑折疊成所需形狀.自折疊的折疊路徑是指平面沿折痕折疊成目標形狀的折疊過程,有效折疊路徑是指每個折痕和平面在折疊過程中是剛性且不發(fā)生碰撞的(如圖3所示).自折疊尋找有效折疊路徑可以看成是折疊初始位置到目標位置的路徑規(guī)劃問題.

圖3 Miura圖案的自折疊過程[9]
切割折疊是指在折痕設計基礎上結(jié)合切割的折疊方式[10],通過在平面上添加切口,利用切割產(chǎn)生的彈力結(jié)合折痕形成復雜的幾何圖形.
2.3 三維折疊
折痕圖案主要為零厚度的紙張創(chuàng)建的,而有些折疊結(jié)構(gòu)是不可以忽略厚度的,例如屋頂、太陽能電池板和太空鏡.而三維折疊是指折疊對象為三維有厚度的物體,即考慮折痕之間的厚度約束及折疊面厚度的情況下進行無碰撞和自交的折疊運動.
3 幾何折疊算法
本節(jié)根據(jù)折疊對象不同,從桿折疊、平面折疊、三維折疊3個方面對幾何折疊算法的研究進展進行論述,總結(jié)這些算法的主要工作、算法思路及特點.
3.1 桿折疊
連桿結(jié)構(gòu)的配置是指對所有連桿端點位置以及連桿方向和關節(jié)角度的指定.最早的在配置問題是1992年Hwang等[11]提出的對連桿結(jié)構(gòu)進行運動規(guī)劃的配置空間,重新配置決策問題簡化為在配置空間中初始配置到最終配置的運動規(guī)劃問題.
2008年,郭益深等[12]開發(fā)了用于控制自由浮動雙臂空間機器人進行折疊運動的自適應RBF神經(jīng)網(wǎng)絡控制器.該方法的優(yōu)點是不需要線性地參數(shù)化系統(tǒng)的動態(tài)方程,也不需要預先知道任何實際的慣性參數(shù),適用于空間機器人的實時和在線應用.
2014年,Cai等[13]采用自然坐標法研究平面閉合雙鏈連桿機構(gòu).利用不同約束條件來形成系統(tǒng)約束方程,獲得雅可比矩陣計算鏈接的自由度.該方法可以用來尋找一些新的平面閉環(huán)連桿機構(gòu).但是,如果連桿在某些特殊配置中具有許多奇異的運動路徑,則無法給出真實自由度.
2016年,Zheng等[14]提出了在3D中構(gòu)造可部署剪刀連桿的方法.該方法將Hoberman的2D連桿構(gòu)造算法[15]擴展到3D,使用多價連接節(jié)點,該節(jié)點具有多自由度,可增加該連桿結(jié)構(gòu)的旋轉(zhuǎn)方向.該算法的不足在于為了避免碰撞會局部變形鋼筋的形狀,且沒有進行受力分析.
2018年,饒聰?shù)萚16]提出生成可展的 2 層多邊形剪刀結(jié)構(gòu)的方法.采用直桿和旋轉(zhuǎn)節(jié)點連接多邊形.計算最大張角得到折疊范圍,多邊形剪刀結(jié)構(gòu)在此范圍內(nèi)運動不會碰撞,使其能夠通過變形盡量壓縮至一個平面.不足在于只采用 3 根直桿連接兩層多邊形剪刀結(jié)構(gòu)時,模型處于一個不穩(wěn)定的狀態(tài).
桿折疊算法重點在于解決配置空間中的運動規(guī)劃問題.但是運動規(guī)劃問題只針對單一自由度的連接節(jié)點,且連桿結(jié)構(gòu)是開放鏈.而對于閉合環(huán)形或有多自由度節(jié)點的連桿結(jié)構(gòu),則更多考慮碰撞檢測問題.
3.2 平面折疊
平面折疊是沿著平面上折痕圖案進行折疊運動的,根據(jù)折疊需要不同,可進一步分為折痕設計、切割和自折疊路徑規(guī)劃3類.
3.2.1 折痕設計
紙折疊的折痕設計按其折痕形式可分為直折痕、彎曲折痕和輔助結(jié)構(gòu).
直折痕折疊是將折疊面看作剛性不可變形的連桿,折痕看作鉸鏈的運動模型.典型的直線折痕結(jié)構(gòu)有Miura-ori折痕[17]、Waterbomb折痕[18]、Yoshimura折痕[19]和對角線折痕[20].2013年,Schenk等[21]提出基于Miura-ori折痕的折疊殼結(jié)構(gòu).該結(jié)構(gòu)內(nèi)部單元為剛性折疊,具有負泊松比特性,但折疊殼結(jié)構(gòu)可以形成扭曲曲面,泊松比為正.
彎曲折痕是指在折疊過程中折痕鏈接的平面會發(fā)生變形和彎曲.2008年,Martin等[22]提出了基于優(yōu)化的計算框架.該框架從離散角度討論彎曲折痕,并進行彎曲褶皺表面的幾何優(yōu)化.不足之處在于對于彎曲程度復雜的曲面不能很好的表示.
2017年,Martin等[23]提出了由弦驅(qū)動的彎曲折疊表面,當拉動弦網(wǎng)絡時,會沿折痕抬起平板以形成自由形狀.該折疊運動通過近似等距的變形將平面變?yōu)檎郫B形狀,發(fā)現(xiàn)相應的可以被驅(qū)動以產(chǎn)生相同的折疊順序的弦網(wǎng)絡.但不是每個彎曲的折疊形狀都可以用弦折疊.
2019年,Jiang等[24]通過建立與偽測地線的連接來獲得可能的折痕模式,離散折痕并優(yōu)化四邊形網(wǎng)格,從而成為離散的褶皺結(jié)構(gòu).該結(jié)構(gòu)享有連續(xù)的規(guī)則保持展開,平坦折疊狀態(tài)以及沿著折痕的恒定折疊角.
2010年,Tachi等[25]提出折合分子的概念,將單張材料折疊成給定的多面體表面,提出基于兩步映射和邊緣分裂的算法,將折疊問題轉(zhuǎn)換為在平面紙上布置表面多邊形的問題,并通過折合分子連接多邊形.但是該算法的不足在于對于無法映射的模型不適用.2017年,Erik等[26]提出的算法使用Voronoi圖作為其折痕模式的基礎,頂點和邊沿增加了小的附加結(jié)構(gòu),然后折疊每個Voronoi單元.該算法具有水密性,折疊將紙張的邊界映射到表面的指定邊界內(nèi),幾何特征是每個凸面都是無縫折疊的,適用于任何多面體流形.
平面折疊主要研究周期性的折疊結(jié)構(gòu)用于擬合曲面,但是僅適用于雙曲曲面的近似模擬;針對特征復雜模型的折疊擬合,通過添加附加結(jié)構(gòu)設計折痕圖案,實現(xiàn)了通過折疊生成三維模型的目標,但是會在原有材料的基礎上增添更多的材料.
3.2.2 切割
2010年,Li等[27]人提出基于用戶給定3D模型的情況下生成彈出式紙結(jié)構(gòu)的算法.該算法給出了模型平面布局即分段線性曲面的幾何公式,以平面布局的幾何圖形為基礎,通過切割和折疊可以物理彈出.目前的算法著力于可實現(xiàn)性,但是它并不能達到一個完全令人滿意的“外形”.
2013年,Sang等[28]提出通過切割和折疊單張紙以產(chǎn)生3D彈出窗口的原始建筑設計方法.該方法提出了新的幾何條件,以確保所生成彈出窗口的可折疊性和穩(wěn)定性.這些條件涵蓋了廣泛的彈出幾何圖形,使得該算法能夠接近于更多的形狀.
2014年,Castle等[29]開發(fā)了一套適用于切割、粘貼和折疊晶格的簡單規(guī)則.該規(guī)則確定了晶格結(jié)構(gòu)的基本單位.切割后留下的間隙通過“爬升”或“滑行”運動或兩者的結(jié)合而閉合,以形成3D階梯狀表面.
2016年,Castle等[30]將切除以非零高斯曲率的點的形式引入到基礎晶格中,將生成階梯結(jié)構(gòu)的規(guī)則減少到最低限度.該方法通過添加新材料統(tǒng)一了多種剪切和粘貼操作.由于沿平面分布高斯曲率的局部來源的自由度增加,因此該方法提供了更多從初始平面中創(chuàng)建任意形狀的機會.但是,缺點是還不適用于逆向設計算法.
3.2.3 自折疊路徑規(guī)劃
2011年,Byoungkwon等[31]提出可編程紙張通過自折疊實現(xiàn)不同形狀的規(guī)劃和控制算法.該算法將連續(xù)折疊運動計劃為所需狀態(tài),得到可行的序列,通過優(yōu)化覆蓋這些圖案,最后確定折痕圖案,以實現(xiàn)形狀控制.
2012年,Zhong等[32]提出用于計劃剛性折紙運動的隨機方法,使用非線性優(yōu)化方法在給定樣本周圍找到有效配置.考慮到對稱性并重用基本折痕圖案上的折疊路徑,利用其對稱性來降低自由度,可以確保折紙在連續(xù)折疊運動過程中的剛度,有效地折疊大折紙鑲嵌.
2015年,Zhong等[33]提出了在離散域中采樣的多自由度折紙的折疊路徑規(guī)劃,使折紙從展開狀態(tài)連續(xù)進入折疊狀態(tài).該方法可以在更短的采樣時間內(nèi)找到更多有效的配置,同時可以快速發(fā)現(xiàn)隱式折疊順序,提供了指導許多折紙的折疊過程的關鍵信息.
3.3 三維折疊
2014年,Zhou等[34]人提出利用連續(xù)折疊序列將三維物體轉(zhuǎn)換為立方體或盒的方法.該方法將對象分割為體素,并搜索可以從輸入形狀折疊到目標形狀的體素樹.該方法可以產(chǎn)生一個單一的、連接的對象,物理地從一個形狀制造和折疊到另一個形狀.
2015年,Chen等[35]提出能夠再現(xiàn)與零厚度折紙相同的厚板剛性折疊方法.厚板折疊運動可以看作是空間連桿結(jié)構(gòu)運動,但是該結(jié)構(gòu)對于非四折痕頂點折紙模式通常包含多個自由度,只能通過對稱或其他方式降低模型的自由度來實現(xiàn)等效性.
2016年,Chen等[36]引入平面對稱的Bricard連桿機構(gòu)形成厚板Waterbomb結(jié)構(gòu).Bricard連桿機構(gòu)在對稱折疊條件下具有單一自由度,可以實現(xiàn)非零厚度折疊與零厚度折疊的等效運動.由于該結(jié)構(gòu)在擴展狀態(tài)和封裝狀態(tài)之間具有很大的可展開比,因此有可能用于折疊大型平面.
2016年,Jason等[37]將平面折痕轉(zhuǎn)換為多面分隔的折痕,用兩個平行的對稱偏移一段距離折痕代替輸入折痕中的每個扁平折痕.丟棄每個折痕圖案頂點附近的材料以適應折痕變寬.該算法可以識別并去除折痕一側(cè)的某些表面材料,以避免自相交.
2018年,Alden等[38]通過開發(fā)能夠產(chǎn)生具有所需特征的空間鏈接排列的方法,實現(xiàn)厚板折疊運動.這些特征包括沒有自相交、保持與鉸鏈節(jié)點相同的自由度以及存在簡單的運動學模型.鉸鏈轉(zhuǎn)置、厚度調(diào)整線和分割頂點被提議為生成具有這些特征的鏈接置換的方法,將有助于創(chuàng)建適用于連桿鑲嵌的修改后的空間連桿.
4 評價分析
本節(jié)總結(jié)幾何折疊的評價指標,并分析比較3類折疊算法.
4.1 評價指標
由于連桿結(jié)構(gòu)是由剛性連桿和旋轉(zhuǎn)關節(jié)組成,其折疊運動多依靠關節(jié)進行旋轉(zhuǎn)運動,所以關節(jié)的自由度(Ndof)決定了連桿結(jié)構(gòu)運動空間的維度,是桿折疊的一項重要指標.
連桿具有兩種關節(jié),固定關節(jié)和自由關節(jié),固定關節(jié)不會增加自由關節(jié),自由關節(jié)會增加2個Ndof,而桿如果沒有多余,則會消除1個自由關節(jié).一個連桿結(jié)構(gòu)具有j個自由接頭和r個桿,則該連桿結(jié)構(gòu)的自由度Ndof為:
Ndof=2j-r
(1)
連桿結(jié)構(gòu)的另一個評價指標為收縮比V[14],即為連桿結(jié)構(gòu)在其最收縮狀態(tài)下的包圍體積Vs與在其最膨脹狀態(tài)下的體積Ve之比:
(2)
平面折疊常用于構(gòu)造三維結(jié)構(gòu),其形狀的剛度可以根據(jù)表面的穩(wěn)定性來衡量.通常,該結(jié)構(gòu)的不穩(wěn)定性數(shù)[25]由下式給出:
DegreesofInstability=3v-e-6
=e0-3
(3)
其中v,e和e0分別是三角化曲面的邊界上的頂點,邊緣和邊緣的數(shù)量.
已知剛性折疊的每個折疊面是平坦不變形的,而彎曲折疊的折疊面會發(fā)生形變,所以折疊面的剛度由其平面度ωplanar度量[24],計算公式為:
(4)
其中dmax是平面中對角線的距離,dav是對角線的平均長度.
折疊結(jié)構(gòu)的可展開性由頂點角度缺陷ωangle來衡量[24],計算公式為:
ωangle=2π-θsum
(5)
其中θsum為該頂點一環(huán)領域的夾角角度和.
由于折疊成的三維結(jié)構(gòu)與原模型存在擬合誤差,可用折疊模型Mo與原模型M之間的Hausdorff距離[39]來表示,其計算公式為:
H=|h(Mo,M)|
(6)
其中h(Mo,M)表示Mo到M的Hausdorff距離.
4.2 算法分析與比較
本節(jié)根據(jù)上述總結(jié)的典型算法思路4.1節(jié)的評價指標,分類對幾何折疊算法進行分析與比較.
4.2.1 桿折疊
表1展示了關于桿折疊算法的分析比較,主要比較因素包括節(jié)點自由度、運動空間維度、算法復雜性和貢獻.
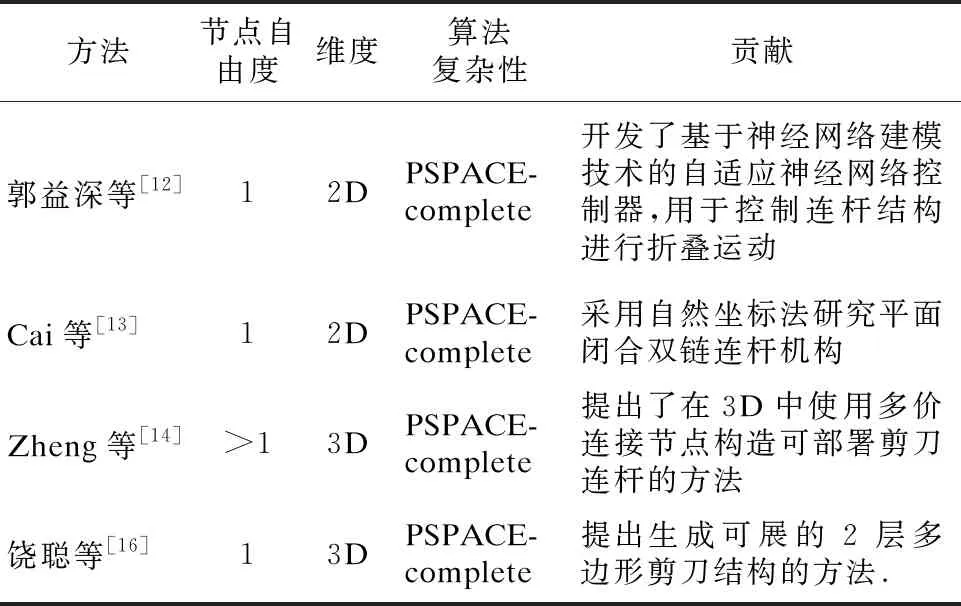
表1 桿折疊算法研究成果分析
在桿折疊的算法中,文獻[12,13]提出連桿結(jié)構(gòu)的幾何約束,通過求解約束條件和碰撞檢測得到運動路徑,但是其運動為平面內(nèi)運動;為了使連桿應用在3維空間中,文獻[16]采用的方法是分層連接,但是本質(zhì)上連桿結(jié)構(gòu)還是平面運動;文獻[14]則是通過添加多價節(jié)點的方式提高自由度實現(xiàn)連桿結(jié)構(gòu)在三維空間的運動.
4.2.2 平面折疊
平面折疊算法的分析與比較如表2所示,主要比較因素包括分類、折痕形式、折疊方式、評價指標和貢獻.

表2 平面折疊算法對比
在折痕設計中,直折痕和彎曲折痕因具有周期性和對稱性,僅適用于雙曲面和特征較少的曲面的折疊模擬;對于復雜三維模型的模擬,文獻[25]采用在映射圖中添加折合分子的方式折疊,該方法依賴模型切割,折疊后不能完全閉合;在此基礎上,文獻[26]提出水密性折疊,優(yōu)化折合分子的大小和位置,使模型的每個凸面都是無縫的.在切割折疊算法中,文獻[27]提出的基于分段線性曲面平面布局的彈出式紙結(jié)構(gòu)給出的幾何條件只滿足一類模型,對于特征復雜的模型并不能完全保留其外形特征,而文獻[28]采用更一般的幾何條件,可以適用于更多的模型,并且使用圖像域方法進行平面布局,在保留輪廓特征、縮小體積、制作時間方面明顯優(yōu)于文獻[27].
4.2.3 三維折疊
三維折疊算法的分析與比較如表3所示,主要比較因素包括折疊方式、自由度和貢獻.

表3 三維折疊算法對比
在三維折疊算法中,文獻[34]主要研究實心三維模型的折疊運動,實現(xiàn)兩種模型形狀之間的轉(zhuǎn)換,應用與可重構(gòu)機器人領域中,但是在模擬精度上存在不足,存在菱角;而文獻[35-38]重點在于實現(xiàn)有厚度折疊與零厚度折疊的等效運動,不關注模型的模擬,主要應用于工業(yè)設計.
5 應用領域
本文從生物醫(yī)療、工業(yè)設計和機器人設計領域這3個方面出發(fā),介紹幾何折疊的應用情況.
5.1 生物醫(yī)療領域
在生物醫(yī)療領域中,幾何折疊結(jié)構(gòu)因其具有伸縮和擴張的特性,可以通過特定方式進行變形而被廣泛應用于醫(yī)療支架,藥物運輸[40]、生物醫(yī)學傳感器[41]等用途.
2006年,Kuribayashi等[42]提出折疊支架設計,該支架通過添加折痕圖案實現(xiàn)圓柱形管狀折疊,應用于微創(chuàng)手術(shù),用于打開和保護阻塞管道.2007年,Christina等[43]使用可液化鉸鏈對二維模板進行光刻圖案化,根據(jù)其加熱后自發(fā)折疊的特性構(gòu)造藥物運輸容器.該容器具有有限的封裝體積,可以制造得足夠小以穿過皮下注射針頭.2012年,Rohan等[44]討論了全聚合容器的自折疊和自折疊聚合物在藥物輸送中的應用.自折疊可以在組裝過程中封裝或自動裝載治療用貨物,對于藥物輸送應用很重要.以后的發(fā)展挑戰(zhàn)在于如何將自折疊聚合物容器進一步小型化至亞微米規(guī)模.
2014年,Kise等[45]評估新型彎曲支架在擴張阻塞血管中的應用.該彎曲支架基于連桿結(jié)構(gòu)并由Goku曲線連接.盡管支架以彎曲的方式擴張,但支架組件在其彎曲部分擴張期間也一致旋轉(zhuǎn),使其在較小和較大的曲率上產(chǎn)生均勻的應力,可以更好更安全的應用在急性彎曲病變中.
2017年,Lin等[46]提出基于折疊的Miura結(jié)構(gòu)的光電探測器陣列組成柔性電子設備,為柔性設備提供出色的全向光收集功能,并具有出色的可變形性,應用于可穿戴設備、生物醫(yī)學傳感器、家庭醫(yī)療、電子皮膚等.
5.2 工業(yè)設計領域
在工業(yè)設計領域中,工業(yè)產(chǎn)品結(jié)合幾何折疊技術(shù)可產(chǎn)生高度變形[47]、縮小存儲空間[48]、提升原有功能[49]等特點.
2012年,Martinez等[50]基于彈性體嵌入片狀結(jié)構(gòu)、及復合纖維結(jié)構(gòu)材料,實現(xiàn)了基于折疊的多用途柔性氣動驅(qū)動器,提高了彈性體驅(qū)動器的剛度.該結(jié)構(gòu)可舉起自重120倍的負載,同時結(jié)合其他組件可以增加功能.
2013年,Song等[51]提出折紙鋰離子電池,可以高度變形.折紙電池是通過Miura折痕圖案折疊而制成的.所得的折紙電池具有明顯的線性和面形變形性、大的可扭曲性和可彎曲性.
2018年,Zhu等[52]提出了折紙啟發(fā)的可折疊多顯示智能手表,通過多個手腕式顯示器的可折疊結(jié)構(gòu)達到與智能手表的交互.該研究為可折疊可穿戴設備的未來面向產(chǎn)品的工作提出了重要而必要的步驟.
2020年,Tao等[53]提出并設計高性能的剪刀結(jié)構(gòu)變形折疊機制,該機制利用了簡單的非相交的有角度元素和類似剪刀的直形元素,具有單自由度、快速致動能力和大變形比的優(yōu)點,用于可控的可擴展多軸飛行器系統(tǒng).該機構(gòu)具有快速適應復雜且動態(tài)變化的出色能力.
5.3 機器人領域
幾何折疊技術(shù)因其在易于制造、折疊式結(jié)構(gòu)緊湊、尺寸可伸縮、保持幾何形狀和傳遞力方面[54]具有優(yōu)勢而被廣泛應用在機器人領域內(nèi).
2017年,Miyashita等[55]基于自折疊的外骨架變形,擴展提高了機器人的功能和性能. 2017年,Li等[56]基于流體驅(qū)動折疊實現(xiàn)了人工肌肉的折疊架構(gòu),該人工肌肉系統(tǒng)的骨架采用彈簧折紙狀的折疊結(jié)構(gòu).2019年,Li等[57]提出半球形空心的真空驅(qū)動軟抓取器的新設計.該軟抓取器基于折疊展開的骨架結(jié)構(gòu)、密封皮膚和連接器等構(gòu)件,可抓取物體的形狀不受限制.
2020年,Hauser等[58]介紹自重構(gòu)模塊化機器人.該機器人通過模塊化技術(shù)將具有編程能力的立方塊組合在一起,實現(xiàn)體折疊運動過程,共同完成一系列復雜的任務.
2020年,Sahand等[59]使用具有定制的非線性剛度的機器人跳躍機制來改善機器人的動態(tài)性能.使用Tachi-Miura多面體波紋管折紙作為具有嵌入式能量存儲的跳躍機器人骨架,使其比線性彈簧能存儲更多的能量,改善了機器人的跳躍高度和飛行時間.
6 總結(jié)與展望
本文對近年來幾何折疊算法進行整理分析,并根據(jù)折疊對象和需求將幾何折疊分類,提出折疊的評價指標,總結(jié)和比較每一類折疊的相關研究工作和算法思想,并介紹幾何折疊的相關應用.
目前幾何折疊技術(shù)對準確性和時效性的要求越來越高,需要提供更為精準和高效的折疊算法.本文基于對現(xiàn)有的算法進行分析,提出了幾何折疊算法的兩個發(fā)展方向,分別為提高算法效率精度和自驅(qū)動.
1)提高算法效率精度
在幾何折疊算法中,分為兩種折疊目標,尋找有效折疊路徑和曲面逼近.現(xiàn)有的尋找有效折疊路徑算法采用自適應神經(jīng)網(wǎng)絡控制器來進行折疊路徑規(guī)劃和碰撞檢測.結(jié)合神經(jīng)網(wǎng)絡尋找有效的折疊路徑,高效且精準.例如使用束搜索和模擬退火算法尋找有效折疊序列[58],通過神經(jīng)網(wǎng)絡訓練多面體的線性無碰撞折疊路徑[60].本文認為,通過使用更為高效的神經(jīng)網(wǎng)絡和搜索算法,可以提高尋找有效折疊路徑的效率,節(jié)約成本.通過幾何折疊來逼近曲面是折疊的另一種應用,在固定材料的情況下目前大多數(shù)算法不適用于特征復雜的三維模型.未來的研究方向需要將模型的復雜特征與折痕圖案結(jié)合考慮,實現(xiàn)更多模型的形狀逼近,并提高其逼近精度.
2)自驅(qū)動
大多數(shù)折疊需要外力驅(qū)動才能開始運動,但有些應用中施加外力是不切實際的.自驅(qū)動技術(shù)則是在不需要外力情況下,通過化學或物理等特性驅(qū)動折疊運動,例如通過光刻圖案化[17].本文認為,自驅(qū)動利用活性材料來發(fā)揮折疊運動是未來的重要研究方向,主演研究重點在于找到適用于具體應用的特定材料和有效折疊路徑,并根據(jù)實際提供驅(qū)動條件,該技術(shù)在未來有待進一步研究探索.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
