線驅動柔性臂捕獲裝置的多體動力學特性分析
2021-08-24 06:41:08蔣萬里
現代制造技術與裝備 2021年7期
蔣萬里 唐 斌 張 平
(大連理工大學 能源與動力學院,大連 116024)
清理太空碎片對航空航天事業的發展乃至人類未來的太空探索具有重要意義。由于太空環境的限制,太空碎片的清理工作只能交由機器人來做。與傳統剛體機器人相比,柔性機械臂具有冗余度高、靈活性好以及適應性強等優點[1]。但是,柔性機械臂在執行捕獲任務時產生的碰撞力,不僅會使柔性機械臂的收攏軌跡產生偏差,還會使柔性機械臂出現大幅度振動,甚至使目標物體逃逸導致任務失敗。因此,針對太空碎片清理分析柔性機械抓取臂的多體動力學特性十分重要。
目前,國內外研究的重點是線驅動機械臂的實物結構創新,研究過程較為耗材費時。針對一些無重力等特殊環境,較難實現實物模擬。基于線驅動柔性機械臂的特點,提出了一種多柔體動力學模型的建模方法,可以較好地進行軟材料機械臂的動力學模擬。最后,通過對比仿真結果和實際運動軌跡,驗證了該方法的正確性,完成了線驅動柔性機械臂捕獲裝置的建模及動力學仿真。
1 多柔體動力學模型
1.1 數學建模
從拉格朗日方程導出柔性體的動力學方程為:
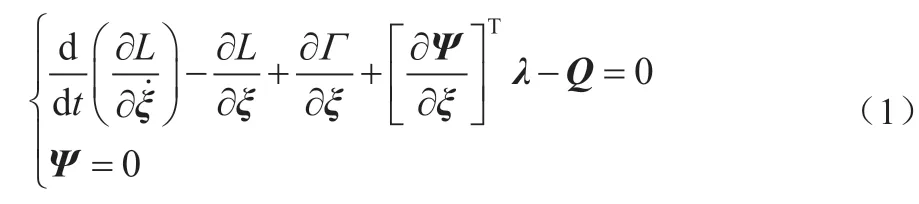
式中:Ψ為約束方程;λ為對應于約束方程的拉氏乘子;ξ為廣義坐標;Q為投影到ξ上的廣義力;L為拉格朗日項,定義為L=T-W,T和W分別表示動能和勢能;Γ表示能量耗損函數。?
將求得的T、W和Γ帶入式(1),可得:
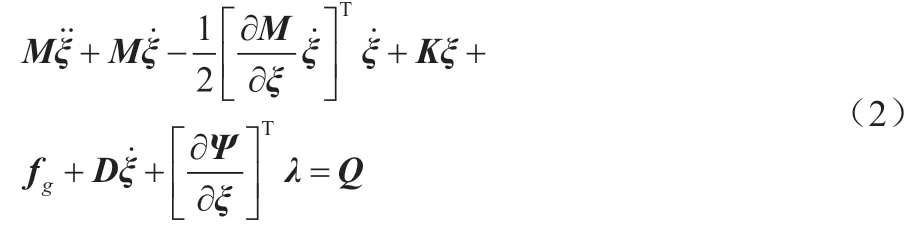
式中:M為柔性體的質量矩陣;為質量矩陣對廣義坐標的偏導數,是一個(N+6)×(N+6)×(N+6)維的張量;N為模態數[2]。
本文研究的線驅動柔性機械臂的多柔體模型,如圖1所示。模型由柔性梁連接的6段柔性鋸齒單元組成,柔性臂左端固定,右端施加相互垂直的兩個分力。柔性臂尺寸為178 mm×25 mm×38 mm,楊氏模量為50 MPa,泊松比為0.48,密度為2 000 kg/m3,阻尼比為0.9。
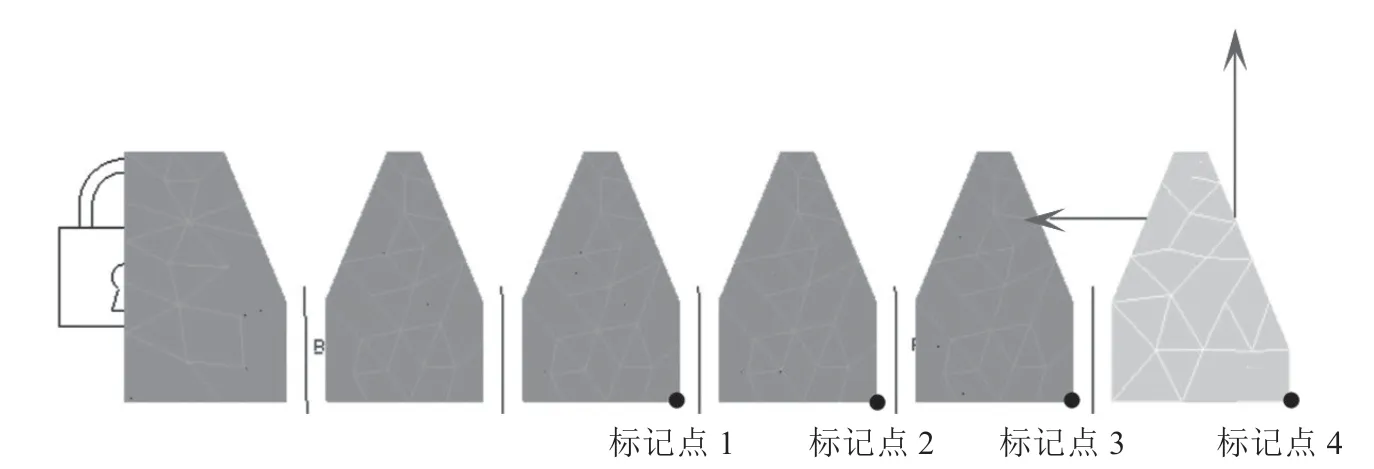
圖1 線驅動柔性臂
先建立每段柔性單元的有限元模型,再使用Craig-Bampton法求出每段單元的節點位移列向量μ與正交模態坐標ql的關系[3]:

式中:?i為第i個正交Craig-Bampton模態;qli為第i個模態坐標;N為所選模態的階數。
因此,線驅動柔性機械臂的多柔性體動力學方程為[4]:

式中:Mf為總質量矩陣;Cf為總阻尼矩陣;Kf為總剛度矩陣;ff為不計碰撞力的總外力列向量;qf為廣義位移列向量。
相鄰兩段柔性單元之間存在間隙,間隙間產生的接觸碰撞力FN以非理想約束反力作用于系統,因此特定情形下需考慮帶有間隙的多柔體系統的動力學方程。
2 模型驗證
以多柔體動力學模型為基礎,對圖1柔性臂進行運動軌跡分析和模型驗證,如圖2所示。圖2中的實線為柔性臂在5 N牽拉力作用下的運動軌跡,其中標記點1至標記點4的位置如圖1所示。在仿真柔性臂右端施加3 N的水平驅動力和4 N的垂直驅動力,仿真運動軌跡如圖2中虛線所示,模型整體變形如圖3所示。
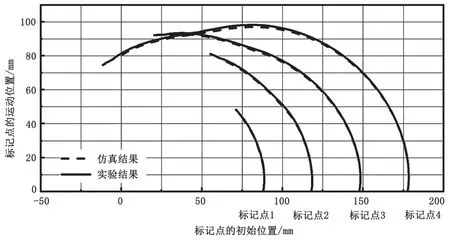
圖2 運動軌跡對比

圖3 柔性臂變形和仿真結果
通過比較可以看出,多柔體模型與線驅動柔性臂的彎曲軌跡和整體變形吻合度較高,可以較好地模擬線驅動柔性臂的彎曲變形。
3 多體動力學特性分析
3.1 驅動力和阻尼比對運動軌跡的影響
在多柔體模型的基礎上,取阻尼比為0.9,分別對模型施加合力為1 N、3 N和5 N的驅動力,結果如圖4所示。結果表明,在不同驅動力的作用下,柔性臂的運動軌跡有差異,驅動力越小,柔性臂包絡的區域越大。

圖4 不同驅動力下標記點的運動軌跡
在多柔體模型上施加合力為5 N的驅動力,分析阻尼比為0.9、1.5和2時的柔性臂運動軌跡結果如圖5所示。結果表明,阻尼比與柔性臂包絡區域的大小成正比。
3.2 捕獲裝置的建模及動力學仿真
為了模擬線驅動柔性臂的捕獲過程,在多柔體柔性臂模型的基礎上,建立了捕獲裝置整體模型。該捕獲裝置由4根柔性臂和固定裝置組成。在無重力狀態下,分析線驅動柔性捕獲裝置對球形目標物體的仿真抓取過程,如圖6所示。從圖6可以看出,球形目標物體先被柔性臂包攏,然后被柔性臂環抱著向固定裝置的方向移動,最后被鎖定在固定裝置中,實現了捕獲。
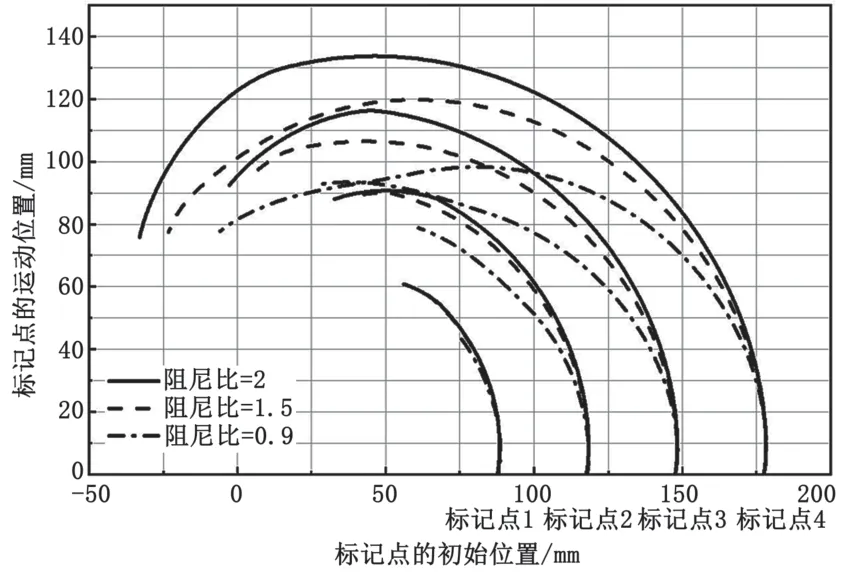
圖5 不同阻尼比下標記點的運動軌跡

圖6 捕獲過程仿真
4 結語
針對線驅動柔性機械臂裝置捕獲目標物體過程中的碰撞問題,提出了一種多柔體動力學模型的建模方法,分析了線驅動柔性機械臂裝置捕獲過程中的多體動力學特性。
(1)建立的多柔體動力學模型能夠較好地模擬線驅動柔性機械臂的運動軌跡和整體變形狀態。
(2)驅動力和阻尼比對線驅動柔性機械臂裝置的捕獲軌跡有影響。捕獲范圍與驅動力負相關,與阻尼比正相關。
(3)基于線驅動柔性機械臂模型建立的捕獲裝置,在無重力環境下,能完成對目標物體的包攏和捕獲。
鑒于柔性臂的材料和結構越來越復雜,提出的建模思路和方法具有一定的參考價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
電腦報(2020年35期)2020-09-17 13:25:53
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
