基于Automation Studio的塔式起重機的建模與仿真
2021-08-24 06:41:18王亞男
現(xiàn)代制造技術(shù)與裝備 2021年7期
王亞男
(陜西能源職業(yè)技術(shù)學(xué)院,咸陽 712000)
塔式起重機工作效率高,是現(xiàn)代建筑施工的重要設(shè)備[1],但其占地面積大,存在一定的操作危險性。操作人員若操作不當(dāng),很可能直接影響人們的生命財產(chǎn)安全。因此,對塔式起重機進行建模仿真,配合人機交互界面模擬塔吊操作的基本動作,如左右回轉(zhuǎn)、吊鉤上下移動和小車前后變幅等,建立駕駛模擬平臺,實現(xiàn)模擬駕駛效果,才能提高訓(xùn)練效率,保證操作人員的實習(xí)時間和實習(xí)安全,減少實訓(xùn)設(shè)備的投入。
Automation Studio[2]集機械、液壓、氣壓、電子、電工、 電氣、可編程邏輯控制器(Programmable Logic Controller, PLC)、順序功能圖(Sequential Function Chart,SFC)及OPC(OLE for Process Control)于一體,建模、控制和動畫仿真等功能較為強大,編程語言較為豐富,包括梯形圖、指令表和SFC等[3]。
本文首先利用SolidWorks建模軟件對塔式起重機零件的主要零部件進行三維建模,其次將建好的塔式起重機零件模型導(dǎo)入AS軟件進行裝配,并關(guān)聯(lián)分配變量,最后設(shè)計塔式起重機的PLC控制系統(tǒng)和PLC硬件結(jié)構(gòu),利用AS軟件對塔式起重機進行了進一步的建模和仿真。
1 塔式起重機結(jié)構(gòu)模型的建立
塔式起重機基本結(jié)構(gòu)包括金屬結(jié)構(gòu)、工作機構(gòu)和驅(qū)動控制系統(tǒng)。金屬結(jié)構(gòu)主要包括支承座、吊臂、平衡臂及回轉(zhuǎn)臺等。小車變幅方式變幅速度快,幅度利用率較高。回轉(zhuǎn)機構(gòu)能夠通過回轉(zhuǎn)支承,使回轉(zhuǎn)部分在左右方向上做360°全回轉(zhuǎn)。起升機構(gòu)通常包括電動機、制動器、卷筒、滑輪組及吊鉤等零件。
本文設(shè)計的塔身標準節(jié)為空間桁架結(jié)構(gòu),標準節(jié)長2.5 m。標準節(jié)間的連接方式為套筒螺栓聯(lián)結(jié),塔身復(fù)桿為角鋼,采用米字型布置方式。塔式起重機臂架使用SolidWorks自頂向下的三維設(shè)計方法,上弦桿為圓鋼,下弦桿為角鋼。總裝配模型如圖1所示。

圖1 塔機三維模型
2 塔式起重機PLC控制系統(tǒng)的設(shè)計
塔式起重機PLC電氣控制系統(tǒng)[3]應(yīng)遵循塔機控制需求的原則,使控制系統(tǒng)簡單、經(jīng)濟、可靠,且滿足PLC各項技術(shù)指標和環(huán)境要求[4]。
本文將塔式起重機控制系統(tǒng)設(shè)計為PLC控制,塔機有回轉(zhuǎn)機構(gòu)、小車變幅機構(gòu)和起升機構(gòu)等。塔式起重機的起升、變幅和回轉(zhuǎn)都需要獨立運行,分別由3個電機控制,且使用1臺PLC控制。
根據(jù)控制要求[5],PLC的輸入包括回轉(zhuǎn)機構(gòu)的逆時針和順時針轉(zhuǎn)動長動與點動開關(guān)信號、小車左行和右行的開關(guān)控制信號、兩個限位開關(guān)信號、吊鉤的上升和下降點動與長動開關(guān)信號等共計15個開關(guān)量輸入信號。PLC控制系統(tǒng)的輸出包括小車前進和后退驅(qū)動信號、限位開關(guān)驅(qū)動信號、回轉(zhuǎn)順時針和逆時針驅(qū)動信號、吊鉤上升和下降驅(qū)動信號、吊鉤上升和下降點驅(qū)動信號等共10個輸出信號。總的控制系統(tǒng)梯形圖[6]如圖2所示。

圖2 控制系統(tǒng)梯形圖
3 塔機起重機的三維動畫仿真
3D編輯器功能將虛擬系統(tǒng)的概念帶到了一個更深的層次,是對其他如液壓、氣動和電氣等自動化工作室及模塊的一種補充。3D編輯器可以方便建設(shè)虛擬環(huán)境并進行模擬,在3D工作室中可以進行旋轉(zhuǎn)和平移等動畫演示,但不能對其進行任何動態(tài)分析(如質(zhì)量、慣性和摩擦等)。AS允許導(dǎo)入用其他的專業(yè)軟件創(chuàng)建3D零件,導(dǎo)入后零件將被機械地連接到其他AS變量并相互關(guān)聯(lián)。3D圖中同一個零件只能導(dǎo)入一次,要導(dǎo)入零件必須打開3D圖,導(dǎo)入方式為將“物體組”-“導(dǎo)入零件”導(dǎo)入的文檔在3D圖中打開,并插入到3D管理器的樹形圖中,使其位于管理器頂部,且在零件上方。
零件創(chuàng)建或者插入3D管理器后可以彼此連接,從而實現(xiàn)實物的高度仿真。在裝配的過程中,可以通過選擇不同的連接類型確定零件的相對位置,也可以和其他AS工作室進行同步動畫仿真。將STL文件轉(zhuǎn)入到AS中,如圖3所示。
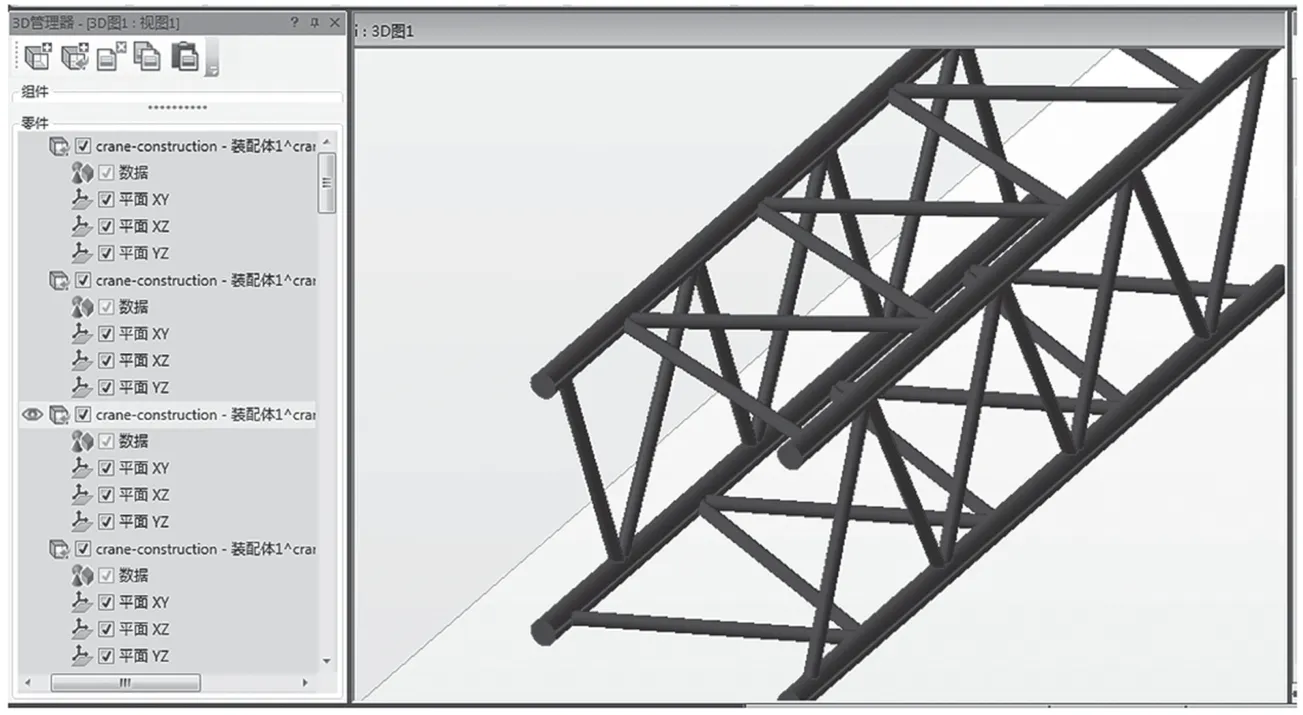
圖3 零件的STL文件轉(zhuǎn)入
由硬件設(shè)計可知,共有13個按鈕控制,分別為回轉(zhuǎn)停止按鈕、長動回轉(zhuǎn)1按鈕、點動回轉(zhuǎn)1按鈕、長動回轉(zhuǎn)2按鈕、點動回轉(zhuǎn)2按鈕、吊裝停止按鈕、長動吊裝1按鈕、點動吊裝1按鈕、長動吊裝2按鈕、點動吊裝2按鈕、變幅停止按鈕、變幅1按鈕以及變幅2按鈕。它們的交互模型界面如圖4所示。
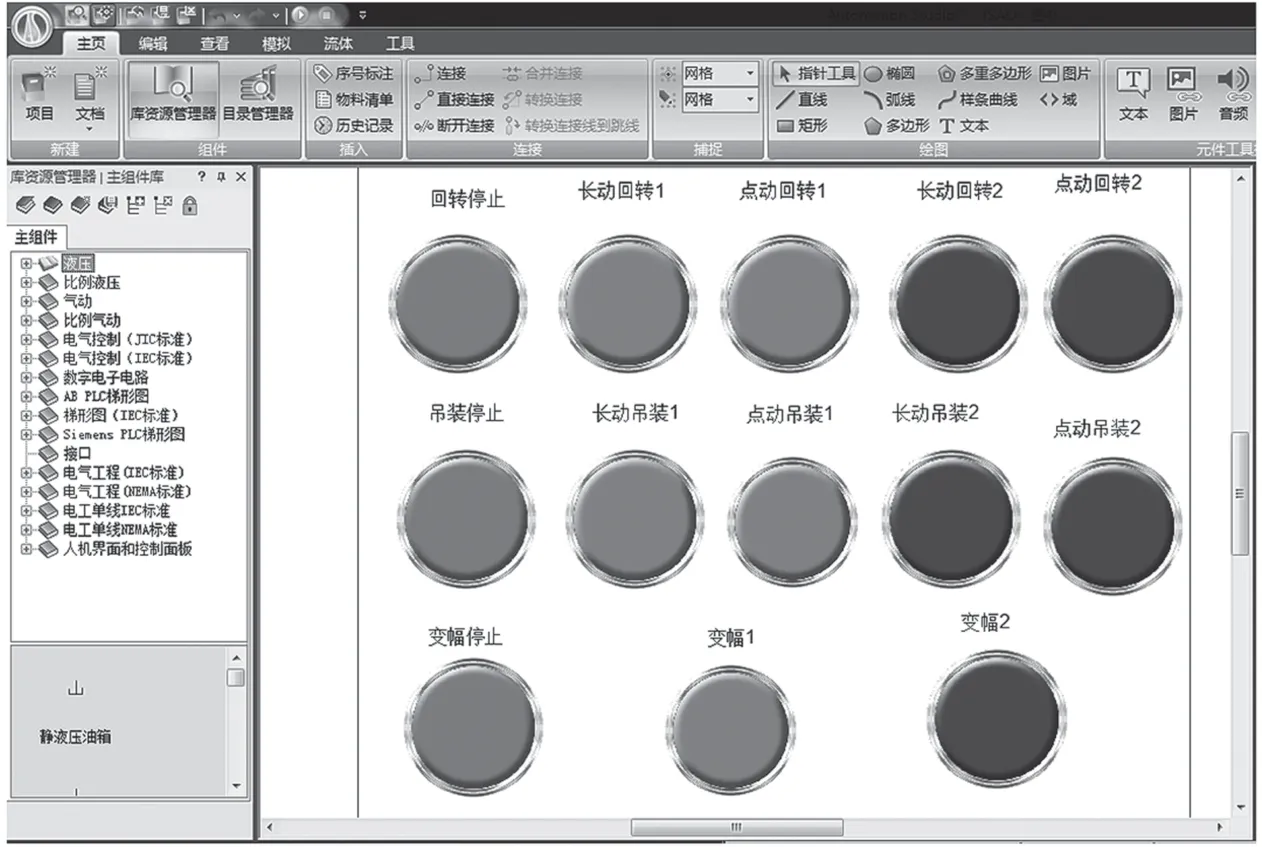
圖4 交互模型界面
4 結(jié)語
本文對塔式起重機進行基于AS軟件的建模與仿真,先用SolidWorks軟件對塔式起重機進行零件三維建模,然后將零件導(dǎo)入AS并關(guān)聯(lián),再用AS軟件控制塔式起重機的運動過程。控制系統(tǒng)平臺采用AS軟件平臺編程實現(xiàn),完成了塔機的過程控制系統(tǒng)和硬件結(jié)構(gòu)的設(shè)計。AS軟件的PLC控制改進了傳統(tǒng)塔式起重機繼電器控制系統(tǒng)的電能浪費大和效率低等缺點,完成了塔式起重機的三維動畫仿真,且運行控制的主要參數(shù)均可控,具有較大的靈活性。
猜你喜歡
青少年科技創(chuàng)新報(2024年23期)2024-07-12 00:00:00
中學(xué)生天地(A版)(2022年10期)2022-11-23 06:42:50
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
奧秘(創(chuàng)新大賽)(2019年12期)2019-11-29 18:26:17
中國生殖健康(2019年3期)2019-02-01 06:12:26
少年文藝·我愛寫作文(2017年6期)2017-06-12 23:21:56
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
商業(yè)評論(2014年9期)2015-02-28 04:32:41
