坐標系統任意框架和歷元轉換研究
2021-08-24 12:39:00張子林
地理空間信息 2021年8期
關鍵詞:模型
張子林
(1.惠州大亞灣經濟技術開發區國土資源測繪所,廣東 惠州 516081)
國際陸地參考系(ITRS)是國際應用最廣泛、影響最深遠的坐標系統,其具體實現的坐標框架稱為國際陸地參考框架(ITRF)。很多國家本土獨立坐標系都以ITRF為標準建立,比如我們國家的CGCS2000坐標[1-3],對應于ITRF97框架的2000.0歷元。由于地球內部(地殼)不斷運動,造成地表站點的位移發生變化,坐標系統也就需要不斷地維護更新核心站點的坐標,每隔一段時間(一般以年為單位)就需發布新的坐標框架。至今,ITRF已經發布了超10個版本,最新的框架版本是ITRF2014。
不同ITRF框架版本間有嚴密的數學模型轉換[4], 然而,由于對地殼具體運動程度不明確,框架內不同歷元轉換困難。有不少學者進行了深入研究,魏子卿院士提出4種方法解決歷元轉換難題,從精度、實用角度做了詳細闡述;在Trimble開發的CenterPoint RTX后處理服務,也明確提供了全球地殼板塊的改正模型;GAMIT/GLOBK軟件在tables中提供了ITRF核心的速度場模型,能夠實現不同歷元 轉換。
本文結合多年研究與工作經驗,總結、梳理前人的研究成果,提出一整套詳盡、可操作的實用方法,實現我國大陸地區ITRF任意框架、任意歷元的坐標轉換。同時,提出快速獲取CGCS2000坐標的新方法。
1 坐標框架轉換模型
同一歷元下,不同的ITRF框架版本之間存在嚴密的數學模型轉換,遵循空間直角坐標系的布爾莎七參數模型,在歷元t時刻,轉公式如下[5-6]:

式中,X,Y,Z表示原ITRF框架下的坐標;XS,YS,ZS表示目標框架下坐標;Tx、Ty、Tz表示兩個框架版本坐標原點的三分量偏差值,單位是mm;D表示尺度縮放因子,單位是PPM(百萬分之一);Rx、Ry、Rz表示旋轉角度因子,單位為mas。具體的數學模型各參數由ITRF官網(https://itrf.ign.fr/trans_para.php)提供。官方提供的參數對應有參考時刻和參數變化率,即15個參數(7參數+7參數變化率+1參考時刻)。表1展示ITRF2014轉ITRF2008框架的參數。

表1 ITRF2014轉換到ITRF2008的參數
根據官方提供的每個轉換參數、參考歷元和變化率,在任意歷元t時刻下,轉換參數求解公式如下:

式中,EPOCH為表1中的參考時刻2 010.0;P、P.分別表示t時刻的轉換參數和參數速率。
測試我國大陸不同地殼活動塊體區域的4個IGS核心站(圖1)在ITRF2014,2020歷元下坐標值轉換到ITRF2008,2020歷元下(表2)。UBUM站位于西域活動地塊,LHAZ站位于青藏活動地塊,WUHN站位于華南活動地塊,SHAO站位于華北活動地塊。根據坐標框架轉換模型計算結果發現相同歷元,不同活 動塊體的站點框架坐標偏差均很小(3 mm以內)。
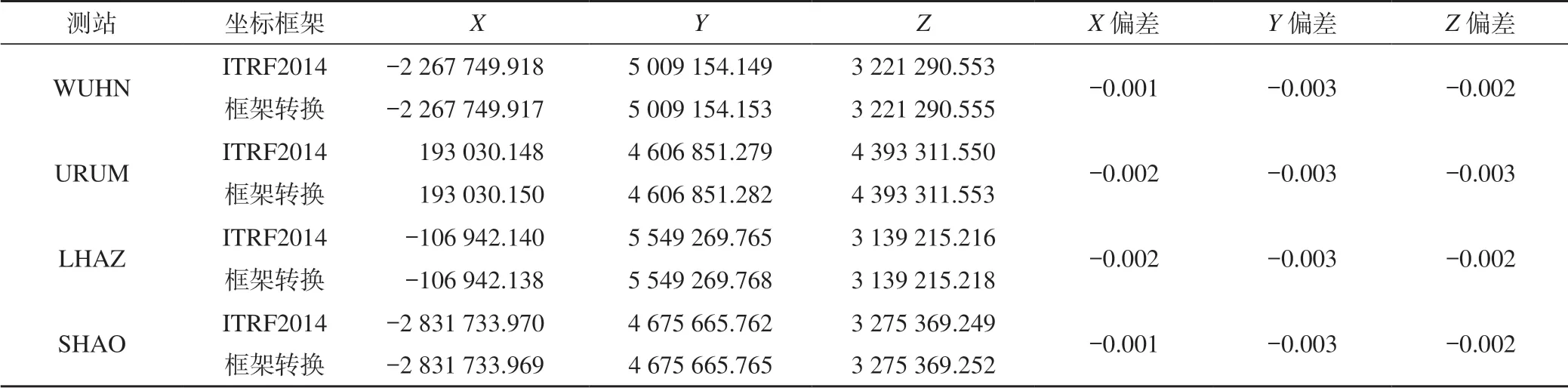
表2 ITRF2008與ITRF2014框架轉換

圖1 中國大陸活動地塊及4個IGS核心站點分布圖
2 坐標歷元轉換模型
在同一坐標框架下,不同歷元的坐標轉換公式(3),其中Xt1、Yt1、Zt1和Xt2、Yt2、Zt2分別是同框架下歷元t1和t2的坐標。根據公式可知,坐標歷元轉換最核心的問題是獲取準確的站點速度值(或者塊體運動模型)Vx、Vy、Vz。

以往獲得速度值(場)模型的研究有很多[7-9],例如全域歐拉矢量法、局域歐拉矢量法、格網平均值法和塊體歐拉矢量法等。魏子卿研究結果證明,局域歐拉矢量法獲得的速度精度最高,全域歐拉矢量法速度精度最低,格網平均值法使用方便,且獲得的速度精度較高,適合一般用戶使用。
圖2展示我國大陸地區137個3 ×3 的格網[7],本文收集公開發表的1998-2014年間全國GNSS站點地表運動背景速度場計算出每個格網在CGCS2000坐標框架下的平均速度值,此值代表格網內所有點的速度。

圖2 中國大陸地區3 ×3 地殼運動速度格網
3 任意框架和歷元轉換實驗
為了驗證本文歷元轉換模型正確性和有效性,設計實驗一,相同框架不同歷元轉換。將圖2中的 4個IGS站在ITRF2008框架歷元2020.0轉換到歷元2016.0,結果顯示表3,對比三分量坐標偏差,可以發現精度均在1 cm左右。

表3 ITRF2008框架下2020.0歷元轉換至2016.0歷元
實驗二:不同框架和歷元轉換;針對不同坐標系統之間的轉換,操作流程通過ITRF97框架過渡,即:A坐標框架轉換到ITRF97下,然后利用圖2中的格網速度模型進行歷元轉換,再經過框架轉換到B坐標。
筆者在日常工作中,經常遇到工程項目中需獲取測區CGCS2000坐標[9-10];通過GNSS靜態觀測以及GAMIT/GLOBK軟件解算獲得毫米級高精度的ITRF2008框架2020.0歷元坐標,通過框架轉換到ITRF97框架2000.0歷元,即獲得CGCS2000坐標系統。
為了驗證方法可行,筆者收集了部分國家B級控制點,按照本文介紹的方法進行坐標轉換計算,表4統計轉換結果,對比B等級控制點真實坐標,發現本文坐標系統轉換精度較高,三分量較差可以達到1cm左右精度。

表4 ITRF2008坐標轉換CGCS2000坐標
4 結 語
本文研究了坐標系統轉換,涉及框架轉換和歷元轉換,提出了一種實際可行的歷元轉換方法。通過總結以往研究中的各類方法,提供我國大陸地區3 ×3 地殼運動速度格網,能夠在工程應用中快速獲得CGCS2000坐標。
本文研究結果表明,相同歷元下,不同框架之間的坐標差異較小,不同活動塊體下ITRF2008和ITRF2014在2020.0歷元時各分量坐標差小于3 mm;受不同區域地殼活動程度影響,相同框架下,不同歷元之間的坐標差異明顯。本文提供的歷元轉換方法,實際測試精度可達1 cm左右,能夠滿足工程應用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
