自動化碼頭岸邊集裝箱起重機特殊作業系統
2021-08-25 08:50:36陳建明
港口裝卸 2021年4期
陳建明
上港集團以色列海法新港碼頭有限公司
1 引言
自動化集裝箱碼頭的計劃安排、設備調度、普通箱裝卸均已實現自動化作業,但岸橋軌內特種箱裝卸船與艙蓋板作業仍沿用傳統的人工操作模式。這種人工操作模式會打斷碼頭自動化作業流程,限制作業資源配置及調度能力,影響作業效率的提升。內外集卡上下檔排隊時需人工核對信息、人工指揮作業,人工信息核對量大且容易產生碼頭前沿集卡混亂等問題,從而降低生產效率和對外服務質量。通過開發自動化碼頭岸橋特殊作業系統,可以完善整個碼頭的自動化流程,使得碼頭智能化程度更高。由系統來調整軌內任務順序,清晰準確地將信息推送給作業人員,便于引導集卡。完善岸橋的自動化流程,減少軌內操作過度依賴人工的情況,降低集卡資源占用時間,提升岸橋作業效率和碼頭自動化程度。
2 系統概述
自動化集裝箱碼頭岸橋特殊作業系統,基于碼頭生產管理系統和岸橋管理系統,對系統各模塊進行擴展與優化,創新性地開發軌內裝卸任務及調度邏輯、自動調整作業關序功能、岸橋軌內自動化操作功能、外集卡導航APP、內集卡調度功能、艙蓋板作業功能、手持終端機功能以及操作界面展示功能,實現作業指令自動發送及調整、設備自動執行、集卡智能調度與引導、數據統計分析等。

圖1 系統流程圖
3 系統功能
自動化集裝箱碼頭軌內系統功能,主要包括軌內裝卸任務調度、自動調整作業關序功能、集卡調度功能、艙蓋板作業功能、手持終端機功能以及TOS-WEB操作界面。
3.1 軌內裝卸任務調度
實現軌內裝卸船自動化指令,需要結合水平運輸機械(即集卡)的實時狀態,因此,新增集卡作業狀態的設置,系統根據集卡的實時狀態,進行系統調度岸橋作業指令的邏輯判斷。
3.1.1 集卡狀態設置
(1)在途狀態。軌內任務發送后,系統自動分配集卡,此時集卡的狀態為“在途”狀態。系統可對“在途狀態”的軌內任務進行作業關序的交換。
(2)岸邊狀態。當集卡到達碼頭岸邊(船頭或船尾等待區域)后,通過手持終端機或者界面進行“岸邊確認”,系統將集卡狀態置為“岸邊狀態”。
在國外,綠色建筑的發展取得了較大的進步,同時也制定了相應的標準支持綠色建筑的發展。如美國于20世紀70年代首次頒布建筑節能標準;英國與90年代也制定了綠色建筑標準。說明國外對綠色建筑高度重視。與國外相比,我國綠色建筑的發展起步較晚,但發展速度較快,例如,近些年,我國節能技術的發展對綠色建筑的實施起到了保障作用。與此同時,智能技術的發展也對綠色建筑施工起到了積極作用,也使我國綠色建筑逐步取得了突破性發展。基于目前全球對綠色建筑的發展情況,綠色建筑將是未來建筑發展的趨勢,也是實現節約能源和環境保護的必然要求。
(3)車道狀態。到達岸橋車道指定位置,通過手持終端機或者界面進行“集卡到位”確認,系統將集卡狀態置為“車道狀態”。1條作業路下僅允許有1輛集卡處于“車道狀態”。
3.1.2 調度邏輯設置
(1)普通箱卸船任務。卸船軌內任務調度條件,當該作業路下對應有1臺空車集卡是岸邊確認狀態,即可調度卸船軌內指令。此時調度的卸船軌內任務,不綁定集卡號,當集卡點擊“集卡到位”后,系統將集卡號和任務進行綁定。
(2)普通箱裝船任務。軌內裝船任務調度條件,當該作業路的任務隊列第一關任務為軌內任務且當前任務的對應集卡處于“車道”狀態。
(3)超限箱任務。裝卸任務的條件與普通箱一致,但需要滿足岸橋作業模式處于“計劃手動”或“手動”作業模式。
3.2 自動調整作業關序功能
在實際生產作業過程中,岸橋作業的任務隊列排序,會根據作業情況而發生變化,若通過船舶控制員人工調整關序,則前期相關操作較多,影響指令發送的及時性。因此,需要系統自動判斷任務隊列作業關序的調整邏輯,減少人工操作的工作量。該功能根據軌內任務隊列的作業順序以及對應集卡的作業狀態進行調整。
3.2.1 軌內任務與自動化任務
當前任務隊列的第一關為軌內任務,但對應集卡狀態處于“在途狀態”,則系統判定集卡不具備作業條件,在實際裝載允許的條件下,與岸橋平臺的自動化任務進行作業順序的交換,保證岸橋的作業連續性。當前任務隊列中的軌內任務對應的集卡處于“岸邊確認”狀態,且已具備提前作業該任務的條件,僅由于在岸橋任務隊列中的作業順序相對靠后,則可通過點擊“集卡到位”,觸發集卡狀態變成“車道狀態”,系統自動將該軌內任務提前至作業關序第一關(岸橋正在作業的任務除外)。
3.2.2 多個軌內任務處理
當岸橋任務隊列中存在連續多個軌內任務時,系統會根據集卡的“岸邊確認”時間的先后,進行相應作業順序的調整,確保岸橋作業的連續性。
3.3 集卡調度功能
岸橋特殊作業系統通過讀取集卡的具體作業類型,分配相應的作業任務給對應集卡,實現集卡任務的自動分配功能。
3.3.1 集卡作業類型
在“集卡控制”的集卡作業類型中,分為“裝卸”、“轉堆”、“岸橋”、“箱區轉運”與“所有”5種作業類型,系統定義集卡當前可接受的任務類型。
3.3.2 集卡調度分配高低平板的邏輯
由船舶控制員根據集卡實際的托架狀態,在界面中設置集卡托架狀態(見圖2),控制集卡任務分配的時機。
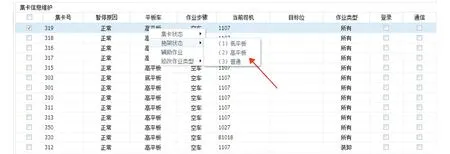
圖2 集卡托架狀態設置
系統則根據相應的條件,進行高低平板集卡的任務分配,具體分配條件為:普通箱任務,對應分配高平板作業;超限箱任務,對應分配低平板作業;油罐箱任務,對應分配高平板作業。
3.3.3 集卡調度時間參數
發送軌內作業任務的時間是根據作業情況而變化的,若在生成軌內任務的同時就分配任務給空閑集卡,則會增加集卡的作業等待時間,從而浪費資源。因此,系統提供集卡調度的時間參數(見表1),控制集卡任務分配的時機。
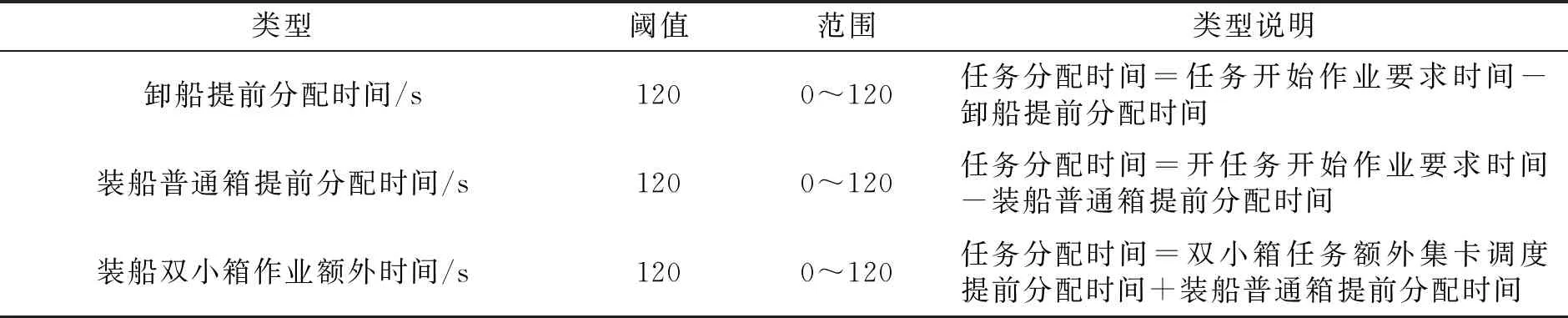
表1 集卡調度時間參數
3.4 艙蓋板作業功能
艙蓋板功能主要實現艙蓋板指令的自動化、岸橋操作信息界面的任務提示以及岸橋視頻監控的自動切換模式功能。
船舶控制員發送艙蓋板作業任務,系統判斷任務類型后,對任務隊列及時進行相應調整。在系統調度的艙蓋板作業指令執行過程中,TOS與ECS之間的指令交互通暢,通過設備開閉鎖情況以及起升高度判斷條件,自動完成指令;也可提供手動完成按鈕,增加可人工干預模式。實時的作業信息在岸橋遠程操作界面上展示。
3.5 手持終端機功能
手持終端可為現場工作人員提供軌內任務的相關提示信息以及相關狀態設置的功能。
(1)集卡狀態設置。通過在手持機上進行集卡狀態的確認,實時更新集卡的狀態。
(2)集卡跟車信息。根據岸橋作業任務隊列,系統判斷軌內任務的先后順序,將作業信息推送給操作人員,讓操作人員能夠明確當前作業任務情況。
(3)集卡上檔提示信息。位于岸橋任務隊列的第一關軌內作業任務,由系統推送上檔提示信息,包括文字信息與語音提示信息,用以提醒軌內作業人員關注集卡行駛情況、保證及時上檔作業。
3.6 TOS-WEB操作界面功能
在TOS-WEB操作界面中,將軌內作業信息完整展示,方便遠程操作員能夠快速、精確地分辨出軌內任務,同時在界面上增加操作功能鍵,讓操作人員可進行遠程輔助控制。
(1)任務顯示。將集卡的作業關號以及空重車狀態進行顯示,方便操作人員掌握目前岸橋作業以及軌內任務的進度。
(2)集卡控制。在集卡控制界面可以設置軌內任務集卡的作業類型和當前實時狀態。
4 結語
自動化碼頭岸橋特殊作業系統自運行以來,已取得顯著成效:改變崗位工作方式,減少工作量,提升工作效率;實現設備自動化對岸橋特殊作業的支持,提升單循環作業效率;智能分配作業任務及發送作業指令,提升內集卡利用率;實現作業信息推送及語音提示,加快信息流轉;實現作業信息數據采集及統計分析。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
故事大王(2016年7期)2016-09-22 17:30:08
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫藥現代遠程教育(2014年16期)2014-03-01 04:28:54
