智能化臨床治療踩蹺實(shí)驗(yàn)儀器設(shè)計(jì)
2021-08-25 07:10:54黃仕磊李慶兵李梓千
自動(dòng)化與儀表 2021年8期
關(guān)鍵詞:單片機(jī)實(shí)驗(yàn)
禮 瑩,張 濤,黃仕磊,李慶兵,李梓千
(1.四川大學(xué) 機(jī)械工程學(xué)院,成都610065;2.四川大學(xué)華西康復(fù)醫(yī)學(xué)中心 康復(fù)醫(yī)學(xué)四川省重點(diǎn)實(shí)驗(yàn)室,成都610000)
踩蹺是治療腰椎間盤突出癥最有效的醫(yī)療手段之一,作為按摩的一個(gè)分支至今已有兩千多年的歷史,是我國醫(yī)學(xué)寶貴的遺產(chǎn)之一。所謂踩蹺,是雙腳同時(shí)在患者腰背部節(jié)律性的彈跳踩踏,是以足作為主要工具治療疾病的中醫(yī)外治療法。這種推拿的操作手法因人而異。不同手法的操作力度、頻率和作用時(shí)間都與臨床療效密切相關(guān)[1],這些都要求醫(yī)生具有專業(yè)的醫(yī)療知識(shí)和推拿技法。但由于推拿手法的規(guī)范化研究至今并沒有單一的標(biāo)準(zhǔn),不正確的推拿手法會(huì)使得治療無法取得好的療效甚至?xí)?duì)健康造成不必要的損傷[2]。所以對(duì)這種推拿手法的規(guī)范化是很有必要的,并且具有研究?jī)r(jià)值。
雖然推拿手法的規(guī)范化研究并沒有單一的標(biāo)準(zhǔn),但可以歸納總結(jié)名醫(yī)專家的手法特色,在其基礎(chǔ)上繼承和發(fā)展,建立一個(gè)衡量標(biāo)準(zhǔn)規(guī)范的指標(biāo)體系,比如羅才貴教授獨(dú)創(chuàng)的羅氏趾壓踩蹺法[3]。因此,假設(shè)用特定的機(jī)械裝置模擬特定的技巧和規(guī)范化的動(dòng)作來進(jìn)行踩蹺實(shí)驗(yàn)和治療疾病,不僅使得踩蹺法更為廣泛地推廣和應(yīng)用,還可以大大減少醫(yī)療人員的人工成本,提高醫(yī)療質(zhì)量,為更多受疾病困擾的病患帶來福音。因此,這套機(jī)械系統(tǒng)對(duì)踩蹺法規(guī)范化具有十分重要的傳承價(jià)值和臨床意義。而目前國內(nèi)外對(duì)此裝置研究寥寥無幾,國內(nèi)研究出了相關(guān)力學(xué)參數(shù)只停留在理論階段,因沒有專業(yè)的機(jī)械裝置,無法通過大量實(shí)驗(yàn)驗(yàn)證參數(shù)的可靠性。
用機(jī)械裝置模擬人工踩蹺對(duì)規(guī)范化踩蹺技巧是一種有效的途徑。首先,考慮實(shí)驗(yàn)?zāi)繕?biāo)為大鼠[4],大鼠作為與人類基因更為接近的哺乳脊椎動(dòng)物,機(jī)能反應(yīng)與人體相似,且繁殖快,生長(zhǎng)周期短,因此用大鼠作為實(shí)驗(yàn)對(duì)象是最好的選擇。觀測(cè)機(jī)械化踩蹺裝置對(duì)大鼠的實(shí)驗(yàn)效果,為以后實(shí)現(xiàn)機(jī)械化踩蹺造福人類打下基礎(chǔ)[5]。
此裝置研究的難點(diǎn)在于如何精準(zhǔn)平穩(wěn)閉環(huán)控制牽引式電磁鐵敲擊的頻率、輕重和作用時(shí)間,能夠較好的模擬專業(yè)的踩蹺技術(shù)。本文采用單片機(jī)作為控制器[6-8],牽引式電磁鐵作為執(zhí)行器,很好的解決了這個(gè)問題,現(xiàn)就該裝置的設(shè)計(jì)進(jìn)行論述。
1 總體設(shè)計(jì)思路
踩蹺系統(tǒng)主要由硬件和軟件兩部分組成。硬件系統(tǒng)主要由機(jī)械部分、主控制器和模擬電路組成,機(jī)械部分用作大鼠放置調(diào)節(jié)試驗(yàn)臺(tái),STM32 作為主控制器。模擬電路由信號(hào)放大電路、場(chǎng)效應(yīng)管放大電路、電源模塊、壓力傳感器和牽引式電磁鐵組成,模擬電路的作用是對(duì)信號(hào)進(jìn)行放大濾波,更好的控制牽引式電磁鐵敲擊[9]。軟件系統(tǒng)對(duì)壓力傳感器采集的數(shù)據(jù)進(jìn)行邏輯控制和數(shù)據(jù)處理,其總體結(jié)構(gòu)如圖1所示。
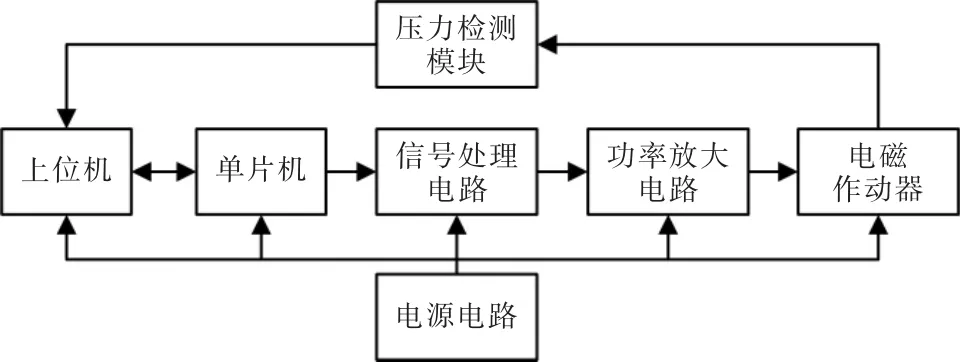
圖1 總體結(jié)構(gòu)圖Fig.1 Block diagram of overall structure
1.1 信號(hào)采集部分
可調(diào)節(jié)固定自動(dòng)敲擊大鼠的實(shí)驗(yàn)裝置結(jié)構(gòu)如圖2所示。機(jī)械裝置包括8 個(gè)部分,底座、底座上的有機(jī)玻璃和夾具用于承載和固定大鼠,夾具是旋鈕式可調(diào)節(jié)移動(dòng)的,5 個(gè)夾具分別用于固定大鼠的頭和四肢[10],且5 個(gè)夾具分別對(duì)應(yīng)5 個(gè)滑槽,方便調(diào)節(jié)和固定大鼠, 也可以適應(yīng)不同體型大鼠的放置,旋鈕是豎桿和橫桿的連接鍵,可以控制電磁鐵上下左右的在三維空間內(nèi)移動(dòng), 電磁鐵上裝有彈簧式觸頭,用于敲擊大鼠,觸頭可拆卸更換,方便滿足不同的實(shí)驗(yàn)需求, 且和電磁鐵之間放置了若干尼龍墊片,具有緩沖減震的作用。觸頭上安裝了薄膜式壓力傳感器,用于測(cè)量敲擊時(shí)的振動(dòng)頻率和力度。機(jī)械部分3D 渲染如圖3所示。
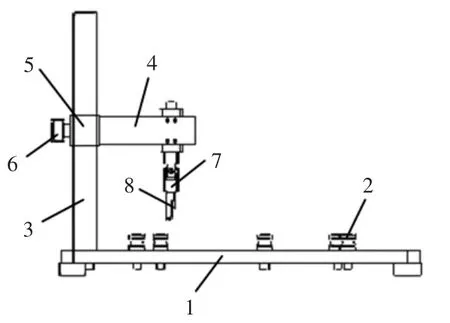
圖2 可調(diào)節(jié)固定自動(dòng)敲擊大鼠實(shí)驗(yàn)裝置示意圖Fig.2 Schematic diagram of adjustable fixed automatic percussion mouse experimental device
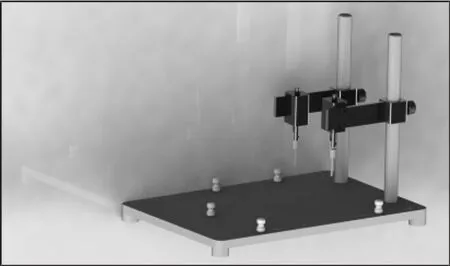
圖3 機(jī)械部分3D 渲染圖Fig.3 3D render map of mechanic part
1.2 硬件電路
1.2.1 牽引式電磁鐵
本實(shí)驗(yàn)的執(zhí)行裝置選用的是牽引式電磁鐵。電磁鐵由復(fù)位彈簧、動(dòng)鐵芯、靜鐵芯及勵(lì)磁線圈4 部分組成。其應(yīng)用了螺旋管的漏磁通原理,利用電磁鐵動(dòng)鐵芯和靜鐵心長(zhǎng)距離吸合,以實(shí)現(xiàn)牽引桿的直線往復(fù)運(yùn)動(dòng)。簡(jiǎn)單的來說,就是通過對(duì)內(nèi)部勵(lì)磁線圈輸入電壓信號(hào)來產(chǎn)生電磁力,銜鐵在電磁力與彈簧彈力的共同作用下進(jìn)行運(yùn)動(dòng),不僅能頻繁啟動(dòng)工作,也可長(zhǎng)期通電吸合[11]。牽引式電磁鐵的原理如圖4所示。
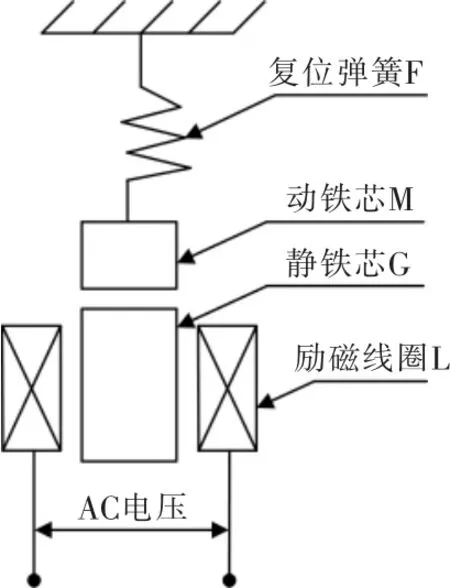
圖4 牽引式電磁鐵原理圖Fig.4 Schematic diagram of tractive electromagnet
本實(shí)驗(yàn)裝置的電磁鐵的線圈選用的是銅線圈,銅的發(fā)熱量低,可以有效延長(zhǎng)工作時(shí)間。電磁鐵體積較小,可以安裝到這種空間較小的場(chǎng)合,通過彈簧可實(shí)現(xiàn)快速的變換,達(dá)到較高的頻率。電磁牽引力計(jì)算如下[12]:根據(jù):

式中:B0為氣隙中的磁感應(yīng)強(qiáng)度 (T);μ0為導(dǎo)磁率4π×10-7H/m;F 為電磁力(N);S0為氣隙面積(mm2)。又因?yàn)椋?/p>

所以:
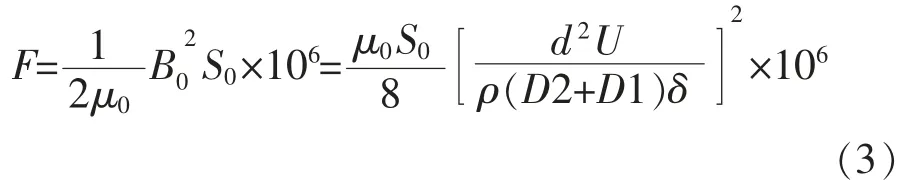
式中:d 為漆包線直徑(mm);U 為電壓(V);ρ 為銅的電阻率0.0178 Ω·mm2/m;D2 為繞線外徑(mm);D1 為繞線內(nèi)徑(mm);δ 為氣隙長(zhǎng)度(mm)即行程。通過計(jì)算得出行程為40 mm~60 mm 以上。
電磁鐵控制原理如圖5所示,是一個(gè)閉環(huán)系統(tǒng),R 是勵(lì)磁線圈的電阻值,k 是電磁牽引力與驅(qū)動(dòng)電流之比。該系統(tǒng)將試驗(yàn)要求參數(shù)作為閉環(huán)控制對(duì)象,且這個(gè)區(qū)間所有干擾因素都會(huì)被反饋環(huán)節(jié)抑制,因此電磁鐵最后將輸出一個(gè)穩(wěn)定精確的電磁牽引力[13]。
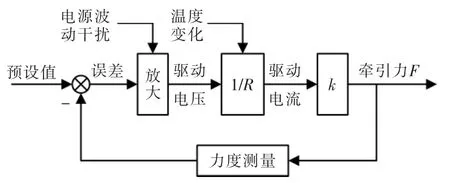
圖5 電磁鐵控制系統(tǒng)原理圖Fig.5 Schematic diagram of electromagnet control system
1.2.2 信號(hào)放大電路
單片機(jī)輸出的信號(hào)電壓是0~3.3 V,而電磁鐵的驅(qū)動(dòng)電壓是5 V,所以為了更靈活的控制電磁鐵,需要對(duì)單片機(jī)的輸出信號(hào)進(jìn)行放大。如圖6所示,這里用到的是同相比例運(yùn)算電路,電容C1起到濾波的作用。
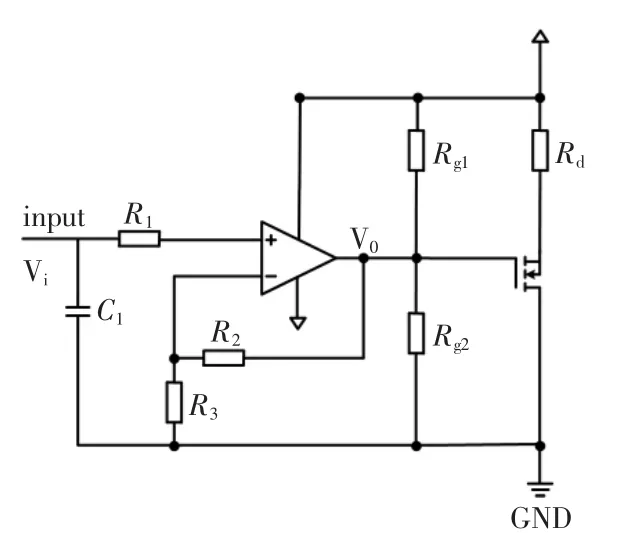
圖6 NMOS 放大電路Fig.6 NMOS amplifier circuit
采用的芯片型號(hào)OP07,是一種低噪聲,非斬波穩(wěn)零的雙極性運(yùn)算放大器[14]。由于OP07 具有非常低的輸入失調(diào)電壓,所以O(shè)P07 在很多應(yīng)用場(chǎng)合不需要額外的調(diào)零措施。同相比例放大電路計(jì)算公式[15]為

因此,R1為100 kΩ;R2為400 kΩ。
1.2.3 NMOS 共源極放大電路
要靈活的控制電磁鐵需要放大電流,且電磁鐵的敲擊力度和電流的幅值是成正比的。此時(shí)需要電壓放大電流電路,本實(shí)驗(yàn)選用的是場(chǎng)效應(yīng)管放大電路。在典型的功率應(yīng)用中,當(dāng)一個(gè)MOS 管接地,而負(fù)載連接到干線電壓上時(shí),該MOS 管就構(gòu)成了低壓側(cè)開關(guān)[16]。在低壓側(cè)開關(guān)中,應(yīng)采用N 溝道MOS 管,這是出于對(duì)關(guān)閉或?qū)ㄆ骷桦妷旱目紤]。N 溝道增強(qiáng)型MOS 管具有輸入阻抗高、噪聲低等特點(diǎn)。增強(qiáng)型MOS 管只有在柵-源電壓達(dá)到其開啟電壓VT時(shí),才有漏極電流ID產(chǎn)生,因此這類管子不能用于自偏壓電路中,應(yīng)當(dāng)使用分壓式偏置電路。下一步是確定所需的額定電壓,額定電壓越大,器件的成本就越高。根據(jù)實(shí)踐經(jīng)驗(yàn),額定電壓應(yīng)當(dāng)大于干線電壓或總線電壓。這樣才能提供足夠的保護(hù),使MOS 管不會(huì)失效[17]。就選擇MOS 管而言,必須確定漏極至源極間可能承受的 最大電壓, 即最大VDS。由于本實(shí)驗(yàn)的額定電壓和額定電流要求比較小,因此一般的MOS 管都能滿足要求。
由圖6可知,柵源電壓VGS由Rg1,Rg2組成的分壓式偏置電路提供。因此有:

場(chǎng)效應(yīng)管T 的開啟電壓為VT,NMOS 管工作于飽和區(qū),因此漏極電流為

漏源電壓為

電磁鐵的驅(qū)動(dòng)電流ID為0.3 A, 已知負(fù)載電磁鐵17 Ω,因此Rg1為65 kΩ,Rg2為47 kΩ。
1.3 軟件系統(tǒng)設(shè)計(jì)
1.3.1 算法設(shè)計(jì)
從人體踩蹺實(shí)驗(yàn)折算下來,最大加壓力度約為受力物體的2.5 倍,人體真實(shí)操作能達(dá)到120 bar 的總壓強(qiáng),面積也大概120 cm2,所以折算下來單位面積的平均壓強(qiáng)為1 bar。
根據(jù)羅氏踩蹺法[18]的技術(shù)參數(shù)要求按人體與大鼠的重量折算,總共有2 個(gè)檔位,分別適用于不同體積的大鼠,每個(gè)檔位的一個(gè)周期敲3 下,具體實(shí)驗(yàn)技術(shù)參數(shù)如表1所示。
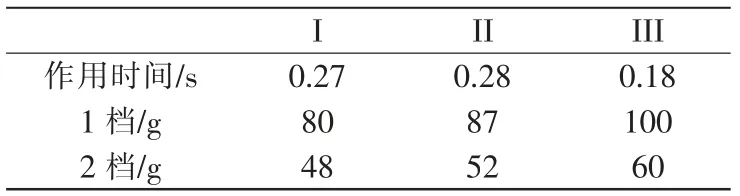
表1 實(shí)驗(yàn)要求Tab.1 Experimental requirements
1.3.2 程序設(shè)計(jì)
在主程序啟動(dòng)后, 首先執(zhí)行系統(tǒng)初始化操作,然后執(zhí)行按鍵掃描模式。當(dāng)KEY1 按下時(shí),電磁鐵處于1 檔控制模式[19];若KEY1 沒有按下,系統(tǒng)將處于待機(jī)模式,壓力傳感器檢測(cè)模塊檢測(cè)后,采集數(shù)據(jù)傳至上位機(jī),即可觀察實(shí)時(shí)敲擊的波形圖。當(dāng)敲擊力超出閾值,即敲擊的力過大或過小時(shí),系統(tǒng)將發(fā)出警報(bào)聲,并通過調(diào)整占空比完成誤差修正后返回單片機(jī)[20]。單片機(jī)輸出修正后的信號(hào)發(fā)送給功率放大電路控制牽引式電磁鐵繼續(xù)敲擊。
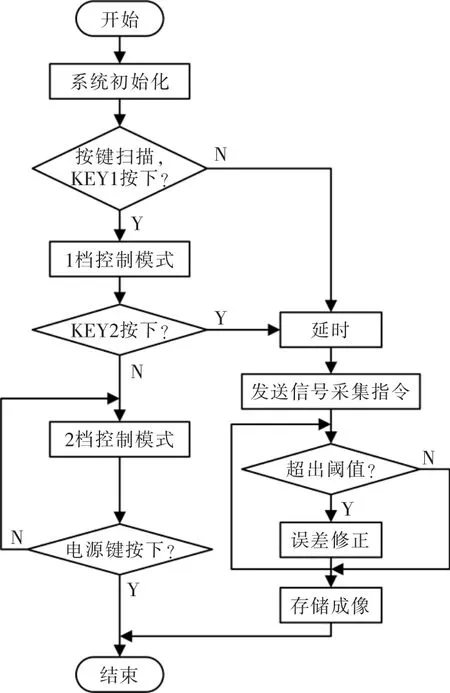
圖7 主程序流程Fig.7 Main program flow chart
2 實(shí)驗(yàn)結(jié)果
為了驗(yàn)證本文設(shè)計(jì)的踩蹺系統(tǒng)是否符合實(shí)驗(yàn)要求,本文進(jìn)行了實(shí)驗(yàn)對(duì)象為大鼠的智能化踩蹺實(shí)驗(yàn)。
如圖8所示,將大鼠氣體麻醉后放置機(jī)械部分的試驗(yàn)臺(tái)上,將大鼠的頭部、四肢和尾部分別固定在凸起的圓柱底座上,固定好大鼠后,調(diào)節(jié)底座豎桿上的連接件旋鈕,使觸頭的位置正對(duì)大鼠尾椎的兩側(cè),并預(yù)留合適的空間距離,然后打開電源開關(guān),最后啟動(dòng)儀器后即可開始試驗(yàn)。
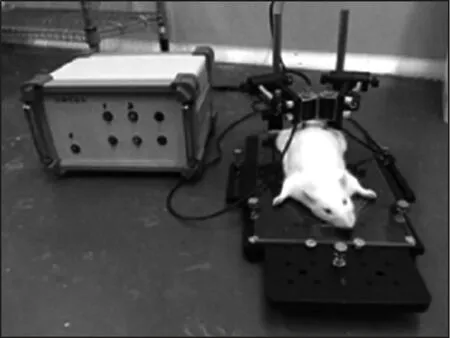
圖8 實(shí)驗(yàn)示意圖Fig.8 Experimental diagram
如圖9所示,壓力傳感器實(shí)時(shí)發(fā)送至上位機(jī)的數(shù)據(jù),分別為1 檔和2 檔的測(cè)試曲線,橫坐標(biāo)為時(shí)間刻度,縱坐標(biāo)為敲擊力的大小。相對(duì)誤差不超過0.6%,根據(jù)實(shí)驗(yàn)結(jié)果證實(shí)此裝置能較好的按照預(yù)設(shè)的實(shí)驗(yàn)要求對(duì)實(shí)驗(yàn)對(duì)象實(shí)現(xiàn)精準(zhǔn)平穩(wěn)的敲擊振動(dòng)。
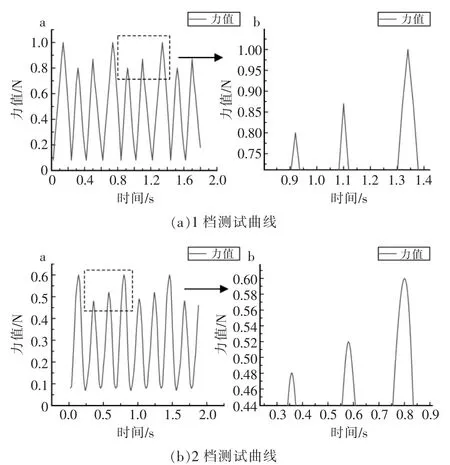
圖9 不同檔位的測(cè)試曲線Fig.9 Test curves of different gears
通過測(cè)試單片機(jī)的輸出電壓和電磁鐵敲擊產(chǎn)生的力的關(guān)系,如圖10所示,線性度控制在99.7%,且誤差的變化較為平穩(wěn),未出現(xiàn)大的抖動(dòng),說明裝置有較高的穩(wěn)定性。
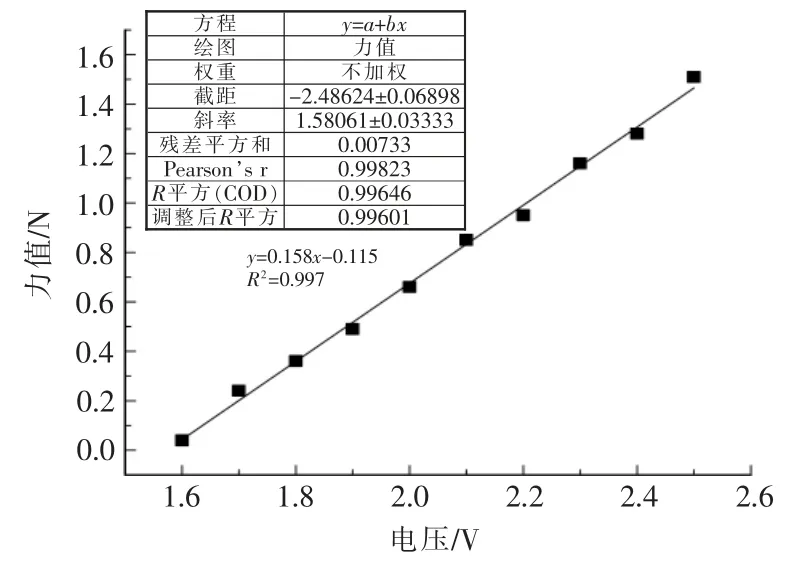
圖10 裝置的線性擬合曲線Fig.10 Linear fitting curve of device
3 結(jié)語
本文設(shè)計(jì)了一種能實(shí)現(xiàn)自動(dòng)控制的智能化踩蹺系統(tǒng), 解決了對(duì)電磁鐵精準(zhǔn)平穩(wěn)的敲擊控制問題,有利于規(guī)范踩敲手法,驗(yàn)證了用智能化機(jī)電裝置代替人工操作的可行性。該裝置已應(yīng)用在大鼠實(shí)驗(yàn)上,在多次實(shí)驗(yàn)中能夠達(dá)到用于大鼠的踩蹺實(shí)驗(yàn)要求。利用人工智能算法模擬羅氏踩敲法,使得裝置的靈敏性和高效性得到更好的提升。本裝置為智能化踩蹺精準(zhǔn)醫(yī)療技術(shù)應(yīng)用于臨床試驗(yàn)和后續(xù)的治療奠定了基礎(chǔ)。踩蹺將成為患者健康和醫(yī)療保健中不可缺少的一種醫(yī)療方法。隨著踩蹺裝置的智能化程度不斷提高。富有濃郁中華民族特色的按摩踩蹺術(shù),會(huì)在全世界范圍內(nèi)得以迅速的推廣和發(fā)展。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
電子制作(2019年13期)2020-01-14 03:15:28
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
