基于K210和YOLOv2的智能垃圾分類平臺
2021-08-25 07:11:00方梓鋒
自動化與儀表 2021年8期
方梓鋒,張 鋒
(廣東石油化工學(xué)院 電子信息工程學(xué)院,茂名525000)
近年來,中國正從國家層面加速推進(jìn)垃圾分類的進(jìn)程,現(xiàn)已取得巨大成就,但有些民眾的分類意識和能力仍比較薄弱。在這個背景下各類垃圾分類平臺層出不窮,而如何實現(xiàn)全程智能化、自動化的高效精準(zhǔn)分類成為了一個比較熱門的研究方向[1],但受限于傳統(tǒng)MCU 的機(jī)器學(xué)習(xí)能力較低, 邊緣計算的概念在環(huán)保行業(yè)仍鮮為提及。
眾所周知,邊緣計算能帶來更快速的服務(wù)響應(yīng)和更優(yōu)質(zhì)的實時業(yè)務(wù)體驗,而目前環(huán)保領(lǐng)域主要的研究方向集中在圖像處理算法和過程自動化上,如文獻(xiàn)[2]通過CNN+ReLU 對垃圾圖像識別分類,擁有80%左右的準(zhǔn)確率、文獻(xiàn)[3-4]均使用了vgg16 神經(jīng)網(wǎng)絡(luò)分類算法對日常垃圾進(jìn)行識別分類,能夠?qū)崿F(xiàn)88%以上的識別準(zhǔn)確率,文獻(xiàn)[5]則采用雙目立體視覺+DCNN 的方案。采用優(yōu)秀卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行垃圾的識別分類無疑能提高系統(tǒng)整體的分類準(zhǔn)確值,但其訓(xùn)練與識別過程需要較高的算力支撐,這一部分往往采用云端算力進(jìn)行彌補,在實際使用中可能會受制于網(wǎng)絡(luò)環(huán)境和云端負(fù)載,導(dǎo)致識別等待時間較長,而使用輕量級神經(jīng)網(wǎng)絡(luò)結(jié)合較高算力的邊緣終端[9]則能夠在實際使用中更具人性化和實用性。
本文結(jié)合國產(chǎn)芯片行業(yè)崛起的大背景,設(shè)計了一款具有垃圾種類判別、智能分類、語音播報、自動開合箱蓋、紫外線消殺以及人體靠近檢測、箱體負(fù)載云檢測等功能。這款智能垃圾分類平臺將不受制于上位機(jī)的整體負(fù)載和通信環(huán)境,能自主完成識別和分類操作,從而縮短整個垃圾回收流程的等待時間。
1 平臺框架與設(shè)計思路
本平臺采用基于RISC-V 框架的勘智K210 作為本地識別的邊緣計算模塊, 通過UART 與Arduino 相連接,能夠?qū)崿F(xiàn)本地?zé)o感識別分類。基本設(shè)計思路如下:
針對目前市面上的智能回收垃圾平臺的問題[9]進(jìn)行了分析和研究,結(jié)合國外在垃圾分類的經(jīng)驗[6-7]。本文提出一款利用智能垃圾分類回收平臺,將邊緣計算、人工智能和互聯(lián)網(wǎng)+特性集于一體,最終達(dá)到垃圾智能化、自動化的分類回收。在設(shè)計箱體時,基于不同的使用場景,會有不同風(fēng)格的設(shè)計,例如在戶外場景,需優(yōu)先考慮惡劣環(huán)境適應(yīng)性,擁有不間斷電源和太陽能充電板的配置,而在室內(nèi)場景下本設(shè)計則重點考慮箱體占用體積和使用安全性等,如圖1所示。

圖1 投放于公共場所的平臺模型設(shè)計Fig.1 Platform model design for public places
2 硬件系統(tǒng)設(shè)計
本設(shè)計的實現(xiàn)主要依托于勘智Kendryte K210核心模塊、Arduino 控制模塊、工業(yè)級大扭力舵機(jī)等元器件。硬件框圖如圖2所示。
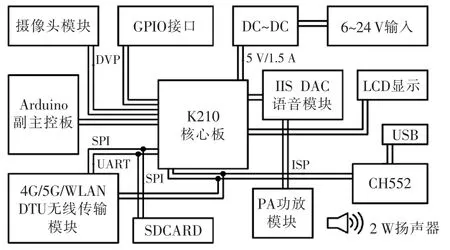
圖2 系統(tǒng)硬件框架圖Fig.2 System hardware framework
2.1 主控制板Kendryte K210 模塊
本設(shè)計所使用的Kendryte K210 模塊,搭載FreeRTOS 操作系統(tǒng)。K210 采用了RISC-V 雙核64 位處理器,并有專用電路實現(xiàn)CNN 加速,在400 MHz 的基準(zhǔn)速率下,INT16 測試擁有300 GMAC/s 的性能表現(xiàn),且整機(jī)耗能小于1 W。其優(yōu)秀的AI 性能,足以勝任本平臺的算力核心。
2.2 副控制板Arduino 模塊
本設(shè)計所使用的副控制板為Arduino UNO,采用ATmega328P 的IC。有14 個數(shù)字輸入/輸出引腳,其中有6 個可用于PWM 輸出、6 個模擬輸入引腳,一個16 MHz 的晶體振蕩器, 一個USB 接口, 一個DC 接口,一個ICSP 接口和一個復(fù)位按鈕。
2.3 攝像頭模塊
對于機(jī)器視覺來說,擁有一雙慧眼則如虎添翼。在攝像頭傳感器上選用了CSP3 封裝的OV2710,采用DVP-10bit 并行數(shù)據(jù)接口。能夠?qū)崿F(xiàn)1080p@30fps的視頻捕獲,為后期KPU 處理提供了一個辨別度較高的輸入值。
2.4 箱蓋開關(guān)閉合模塊
采用了工業(yè)級40 kg 大扭力舵機(jī),接入Arduino控制板的PWM 接口,由PID 算法進(jìn)行控制,投放不同的垃圾時會采用相應(yīng)的PWM 波信號對舵機(jī)進(jìn)行操作, 實現(xiàn)在開蓋速度和角度的人性化和智能化。為確保機(jī)械臂的高強度和耐用性,在材質(zhì)上選用了建材行業(yè)常用的6063 鋁合金, 擁有優(yōu)秀的抗風(fēng)壓性能、裝配性能、耐蝕性能和裝飾性能。且在頂部設(shè)置有太陽能電池板為箱體蓄電池組提供互補供電。
3 軟件系統(tǒng)設(shè)計
垃圾智能分類平臺的軟件設(shè)計主要包括K210和Arduino 上的分類算法設(shè)計、攝像頭控制、舵機(jī)控制、傳感器控制和通信協(xié)議。
3.1 分類算法的設(shè)計
垃圾分類的核心是圖像的處理和識別,本平臺以Darknet 為深度學(xué)習(xí)開發(fā)框架、利用YOLOv2 模型[8]對投放物進(jìn)行檢測和分類,以達(dá)到智能化垃圾分類的目的。本平臺所使用的YOLOv2 模型,網(wǎng)絡(luò)簡單,處理量小,而且擁有不錯的mAP 和FPS 性能指數(shù),如表1所示[4]。
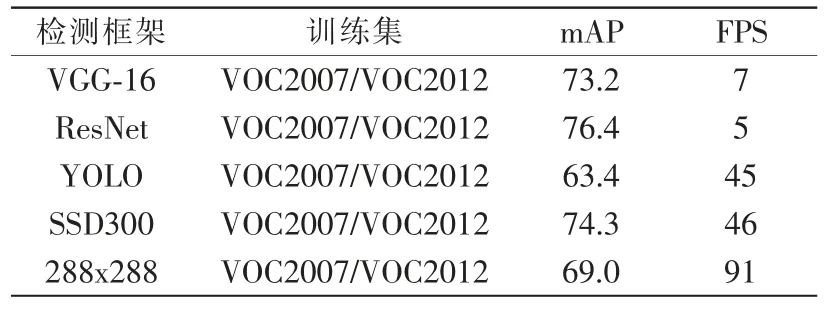
表1 YOLOv2 性能指數(shù)Tab.1 Efficiency of YOLOv2
首先從模型建立開始,由于使用的是random 模式(多角度訓(xùn)練),需要采集不同種類垃圾多角度的圖像,并在相應(yīng)的樣本標(biāo)注信息中記錄好各個角度下的5 組數(shù)據(jù):對象索引號、對象中心坐標(biāo)XY 軸、對象的寬和高。將YOLO 訓(xùn)練的batches、subdivision等參數(shù)配置完畢后, 便可以開始模型訓(xùn)練步驟,在平均損失率達(dá)到0.060730 avg 左右且不再下降時即可以停止訓(xùn)練,隨后開始進(jìn)行模型的分類準(zhǔn)確率測試,測試流程如圖3所示。
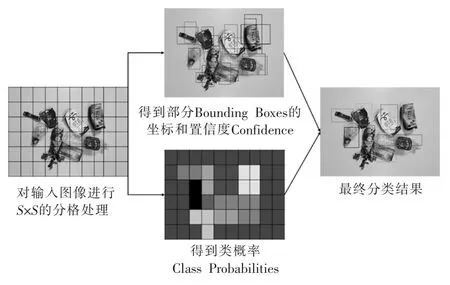
圖3 YOLOv2 模型分類流程Fig.3 Flow chart of YOLOv2 model classification
完成了模型的訓(xùn)練和測試,還需要考慮針對后期的模型優(yōu)化,以適合用于K210 等輕量級終端上,本平臺采用了剪枝項目[9]的理論基礎(chǔ),對YOLOv2模型進(jìn)行了稀疏訓(xùn)練[10],其原理為每個通道引入一個比例因子γ,并將其乘以通道的輸出。將比例因子與訓(xùn)練網(wǎng)絡(luò)的權(quán)值相結(jié)合,通過稀疏的正側(cè)化處理,最后直接去除比例因子通道,得到微調(diào)剪枝網(wǎng)絡(luò)。
培訓(xùn)目標(biāo)被定義為

式中:x,y 代表訓(xùn)練數(shù)據(jù)和標(biāo)簽;W 是網(wǎng)絡(luò)可訓(xùn)練參數(shù);第一項為訓(xùn)練的loss 函數(shù);第二項的g(γ)為比例因子上的參數(shù);λ 是稀疏系數(shù)。當(dāng)選取即為廣泛應(yīng)用于稀疏化操作的L1-Norm (L1 正則化)。經(jīng)過優(yōu)化后的模型有效的降低了內(nèi)存占用和模型存儲空間[11],將有利于在K210 上實現(xiàn)高效的部署、運行和維護(hù)。
導(dǎo)入訓(xùn)練完畢的模型到K210 上運行測試時,需要調(diào)用其內(nèi)置的神經(jīng)網(wǎng)絡(luò)處理器KPU,通過加載和運行內(nèi)構(gòu)建的算法模型來實現(xiàn)目標(biāo)檢測,分類流程如圖4所示。
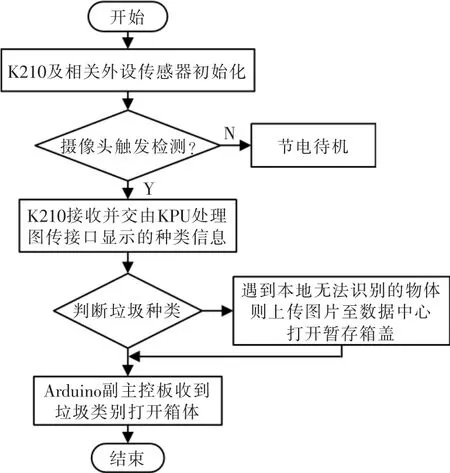
圖4 智能垃圾分類流程Fig.4 Flow chart of garbage classification
3.2 攝像頭控制
攝像頭與K210 通過DVP 并行接口相連接,在驅(qū)動中額外添加了超時待機(jī)和臨近喚醒的中斷函數(shù),在空閑時段將攝像頭關(guān)閉,不進(jìn)行實時捕獲,等待傳感器返回參數(shù)告知攝像頭開始工作。在實際工作中,攝像頭負(fù)責(zé)傳輸畫面至識別程序指定的接口上,識別程序在該接口內(nèi)進(jìn)行逐幀的目標(biāo)檢測。在K210 內(nèi)的主體函數(shù)中有一個鉤子函數(shù),當(dāng)系統(tǒng)級捕獲到屬于person 索引(主要為手部)中的內(nèi)容時,會對除person 索引內(nèi)容以外的進(jìn)行目標(biāo)檢測,從而指引Arduino 副主控對對應(yīng)箱體進(jìn)行開關(guān)操作, 檢測流程如圖5所示。
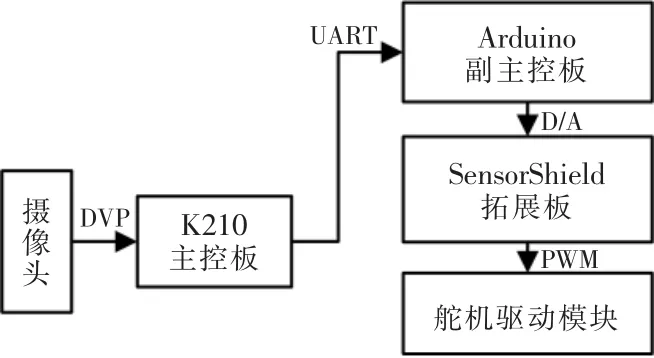
圖5 攝像頭捕獲流程Fig.5 Flow chart of camera capture
3.3 舵機(jī)控制
舵機(jī)在本平臺中用于處理需要機(jī)械化控制的部分,對不同種類的垃圾以及不同體積的投放物采用不同的處理時間(即打開角度),通過PID 控制算法完成, 具體實現(xiàn)為在Arduino 控制板中編寫舵機(jī)的PWM 波函數(shù),對K210 返回不同種的類參數(shù)進(jìn)行對應(yīng)處理。由接口發(fā)生PWM 信號,與舵機(jī)相連,舵機(jī)再帶動井蓋控制臂,實現(xiàn)開蓋功能。控制流程如圖6所示。
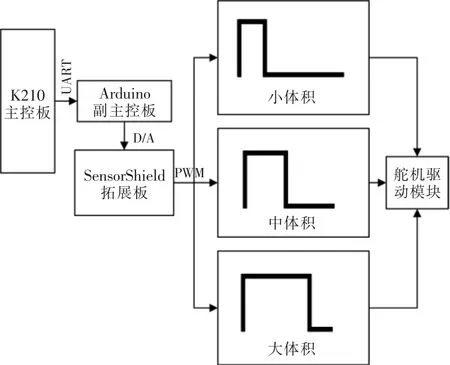
圖6 舵機(jī)控制流程Fig.6 Flow chart of steering control
3.4 傳感器控制
傳感器的控制主要由Arduino 副主控板進(jìn)行,負(fù)責(zé)采集箱體內(nèi)外的環(huán)境數(shù)據(jù), 實現(xiàn)人體靠近檢測、聯(lián)動自動開蓋、箱體滿載檢測等功能。人體靠近檢測程序設(shè)定2 m 為標(biāo)志位, 采用PIR 熱電傳感器,設(shè)定連續(xù)檢測模式,工作流程為當(dāng)在檢測范圍內(nèi)捕獲到人體10 μm 紅外線時會保持持續(xù)高電平,K210 得到SensorState 參數(shù)為1 后通知攝像頭開始工作,同時Arduino 等待K210 分類結(jié)果,打開對應(yīng)箱體。
超聲波模塊放置在箱體頂蓋中,以箱內(nèi)垃圾最高面到頂部距離為檢測標(biāo)準(zhǔn),消去內(nèi)箱體至頂層的距離N,實際的Distancce 應(yīng)該為[pluseIn(echo,HIGH)/60.00]-N, 設(shè)定Distance 閾值來實現(xiàn)對箱體的容量監(jiān)測,傳感器反饋流程如圖7所示。
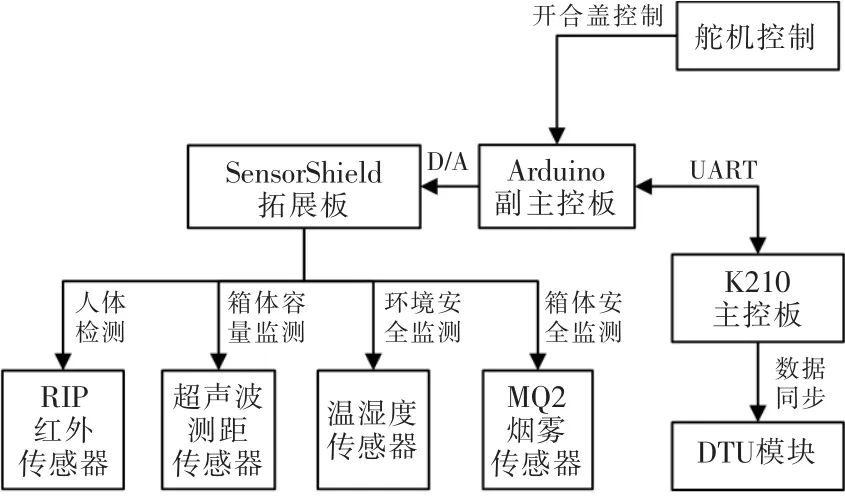
圖7 傳感器反饋流程Fig.7 Flow chart of sensor feedback
3.5 通信協(xié)議
本設(shè)計使用的是DTU 模塊與上位機(jī)進(jìn)行數(shù)據(jù)交互, 采用TCP 協(xié)議的串口數(shù)據(jù)流傳輸, 使用SOCKET 方式連接上位機(jī), 實現(xiàn)上位機(jī)的通信。而K210 與Arduino 經(jīng)過UART 串口進(jìn)行通信,編寫自定義通信協(xié)議, 當(dāng)K210 發(fā)送AA0301020306 的數(shù)據(jù),即告知協(xié)議首部AA,指令長度為03,控制指令010203,即為設(shè)備類別為01,第2 號設(shè)備,端口03,這三個校驗和06,然而還需要一個Protocol Parser類庫來解析字段義,才能實現(xiàn)通信,其流程如圖8所示。
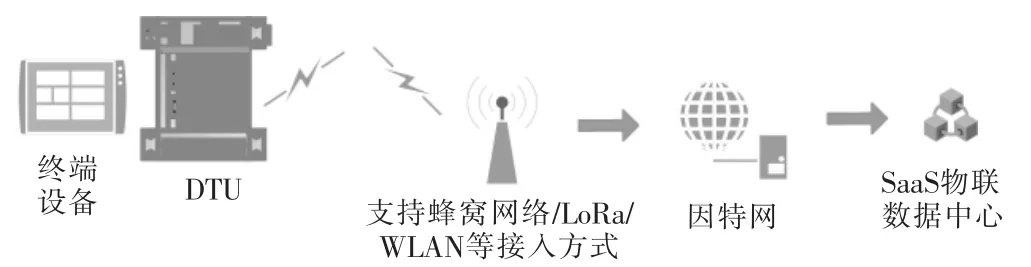
圖8 設(shè)備經(jīng)由DTU 的上位機(jī)通信流程Fig.8 Flow chart of communication with DTU
4 系統(tǒng)測試
4.1 分類準(zhǔn)確性測試
測試用的圖像數(shù)據(jù)集依照VOC 數(shù)據(jù)集格式構(gòu)建,通過labelimg 標(biāo)記工具進(jìn)行圖像目標(biāo)區(qū)域登記,完成相關(guān)配置后使用darknet 對YOLOv2 進(jìn)行訓(xùn)練,最終得到多次迭代后保存的訓(xùn)練權(quán)重模型,將train_log_loss 中的數(shù)據(jù)可視化得到圖9曲線,可見損失變化曲線在經(jīng)22 萬次迭代后基本達(dá)到平均損失率。
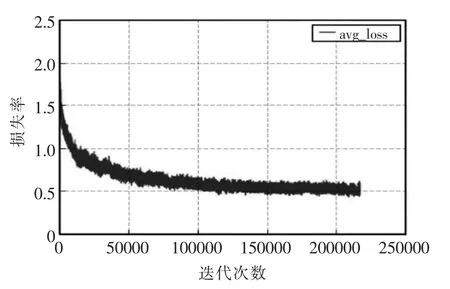
圖9 模型訓(xùn)練平均損失率結(jié)果Fig.9 Average loss rate of model training
將迭代權(quán)重模型導(dǎo)入SD 卡中, 放置入測試用的Sipeed M1 荔枝丹K210 開發(fā)板,使用KPU 加速YOLOv2 目標(biāo)檢測算法, 對四類垃圾進(jìn)行識別的準(zhǔn)確率如表2所示,雖在過程中出現(xiàn)了個別物品名稱識別錯誤的情況,但所屬大類仍在正確的范疇之內(nèi)。

表2 識別準(zhǔn)確率結(jié)果統(tǒng)計Tab.2 Statistics of recognition accuracy results
4.2 回收投放測試
同時舵機(jī)的響應(yīng)時間也在程序設(shè)定的范圍之內(nèi),對不同尺寸的投入物響應(yīng)時間和箱蓋打開角度如表3所示, 設(shè)定了超時時間對箱蓋進(jìn)行狀態(tài)檢查,人體傳感器保持高電平時設(shè)定為無效。
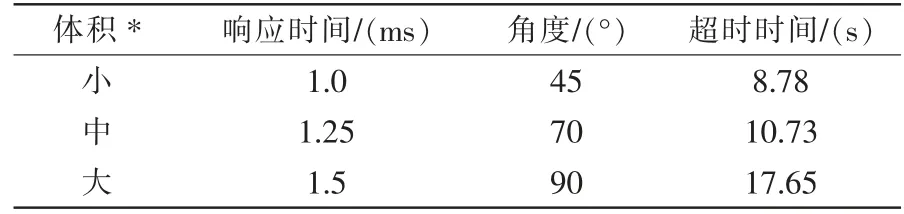
表3 舵機(jī)響應(yīng)時間Tab.3 Response time of steering engine
綜上圖像數(shù)據(jù)和表格結(jié)果表明,本平臺能夠準(zhǔn)確識別人體靠近并開始工作,物品分類平均識別準(zhǔn)確率達(dá)92.4%,并且能夠準(zhǔn)確打開對應(yīng)種類箱體,并能夠判斷和上傳垃圾箱余量信息。箱體監(jiān)測的傳感器也能對高溫、煙霧等異常狀態(tài)正常告警。PIR 熱電傳感器維持高電平時,箱體開蓋后的防夾傷機(jī)制也正常工作,能夠確保使用的安全性,較好的完成設(shè)計初提出的各項功能指標(biāo)。
5 結(jié)語
本文提出利用K210 開發(fā)板協(xié)同Arduino 進(jìn)行智能垃圾分類的設(shè)計方案, 運用邊緣計算+機(jī)器視覺賦能傳統(tǒng)產(chǎn)業(yè),充分發(fā)揮邊緣計算的優(yōu)勢,極大的縮短了分類等待時間,具有個性化、模塊化等特點,但目前在識別過程中對小種類的判別仍存在誤差,受訓(xùn)練參數(shù)的影響較大等問題,后續(xù)工作將繼續(xù)對目標(biāo)檢測和剪枝算法進(jìn)行優(yōu)化,尚有較大的改進(jìn)空間。本設(shè)計通過套入不同模型亦可適用于其余的智能化分類領(lǐng)域,助力其余傳統(tǒng)行業(yè)升級轉(zhuǎn)型為互聯(lián)網(wǎng)+智能化的產(chǎn)業(yè)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
