串聯(lián)彈性驅(qū)動(dòng)器設(shè)計(jì)、建模及在機(jī)器人上的應(yīng)用
2021-08-28 04:55:14孫寧程龍
自動(dòng)化學(xué)報(bào) 2021年7期
關(guān)鍵詞:模型
孫寧 程龍
驅(qū)動(dòng)裝置作為機(jī)器人系統(tǒng)運(yùn)動(dòng)和驅(qū)動(dòng)力的輸入單元,其性能優(yōu)劣對(duì)機(jī)器人系統(tǒng)的整體性能具有很大影響.傳統(tǒng)機(jī)器人多采用剛性驅(qū)動(dòng)器,能夠精確地傳遞運(yùn)動(dòng),而人或其他動(dòng)物的驅(qū)動(dòng)裝置是肌肉組織,具有柔順性,導(dǎo)致人或其他動(dòng)物在運(yùn)動(dòng)、安全與能源效率等方面遠(yuǎn)遠(yuǎn)超過(guò)傳統(tǒng)機(jī)器人系統(tǒng).因此,剛性驅(qū)動(dòng)器已經(jīng)阻礙高性能機(jī)器人的發(fā)展.為解決該問(wèn)題,研究人員提出一種模擬生物肌肉的柔順性驅(qū)動(dòng)器—串聯(lián)彈性驅(qū)動(dòng)器(Series elastic actuator,SEA),其主要是在驅(qū)動(dòng)裝置與末端執(zhí)行器之間增加具有彈性和阻尼特性的裝置,解除驅(qū)動(dòng)裝置和末端執(zhí)行器之間的耦合關(guān)系,同時(shí)使SEA 輸出力與其形變量、相對(duì)速度成一定關(guān)系.與傳統(tǒng)的剛性驅(qū)動(dòng)器相比,SEA 具有被動(dòng)柔順性、阻抗低、抗沖擊、力感知等優(yōu)點(diǎn)[1],已被廣泛地應(yīng)用于各種場(chǎng)合.
1995 年P(guān)ratt 等首次提出SEA,其由驅(qū)動(dòng)裝置、減速裝置、彈性元件、末端執(zhí)行器以及位置傳感器串聯(lián)而成,具有彈性特性,應(yīng)用于腿足式機(jī)器人中,以實(shí)現(xiàn)力控制[2].在此基礎(chǔ)上,研究人員依據(jù)應(yīng)用場(chǎng)景需求對(duì)其彈性和阻尼特性進(jìn)行研究,進(jìn)而分別提出串聯(lián)阻尼驅(qū)動(dòng)器[3]和串聯(lián)粘彈性驅(qū)動(dòng)器[4].本文將以上三種結(jié)構(gòu)相似的驅(qū)動(dòng)器都視為SEA.同時(shí),因?yàn)殡姍C(jī)(包含減速裝置)具有體積小、易于控制等特點(diǎn),通常將其作為SEA 的驅(qū)動(dòng)裝置.因此,本文僅介紹以電機(jī)作為驅(qū)動(dòng)裝置的SEA.
到目前為止,研究人員已經(jīng)將各種SEA 廣泛地應(yīng)用于外骨骼機(jī)器人[5?10]、腿足式機(jī)器人[11?17]、假肢機(jī)器人[18?22]、仿人型機(jī)器人[23?27]等領(lǐng)域.為適應(yīng)不同的應(yīng)用需求,發(fā)展出了各種特定的SEA,這些方案都是依賴于應(yīng)用場(chǎng)景的具體解決方案,沒(méi)有能夠滿足不同應(yīng)用場(chǎng)景需求的最好設(shè)計(jì).因此,對(duì)SEA的現(xiàn)有機(jī)械設(shè)計(jì)技術(shù)、建模方法以及在機(jī)器人系統(tǒng)上的應(yīng)用進(jìn)行概述,幫助設(shè)計(jì)者充分理解SEA 的特點(diǎn),為得到合適的機(jī)械設(shè)計(jì)、精確的力感知能力和穩(wěn)定的控制提供指導(dǎo)是有必要的.
為解決該問(wèn)題,Lee 等依據(jù)彈性元件相對(duì)于減速器和末端執(zhí)行器的安裝位置,對(duì)SEA 進(jìn)行分類(lèi)介紹,并對(duì)各類(lèi)SEA 的動(dòng)力學(xué)模型進(jìn)行描述[28],為SEA 的機(jī)構(gòu)設(shè)計(jì)和控制提供指導(dǎo).Vanderborght等依據(jù)可變彈性和可變阻尼的實(shí)現(xiàn)方式,對(duì)變阻抗彈性驅(qū)動(dòng)器(SEA 的上層概念)進(jìn)行分類(lèi)介紹,以指導(dǎo)變剛度驅(qū)動(dòng)器的機(jī)構(gòu)設(shè)計(jì),但沒(méi)有針對(duì)SEA進(jìn)行詳細(xì)描述[29].魏敦文等對(duì)仿生靈感下的彈性驅(qū)動(dòng)器(SEA 的上層概念)的結(jié)構(gòu)組成、功能特性和應(yīng)用等方面的研究現(xiàn)狀進(jìn)行闡述,但是未對(duì)SEA 的機(jī)械實(shí)現(xiàn)方式和作為力傳感器的建模方法進(jìn)行詳細(xì)介紹[30].綜上所述,現(xiàn)有文獻(xiàn)未對(duì)SEA 電機(jī)與末端執(zhí)行器之間的機(jī)械實(shí)現(xiàn)方式進(jìn)行介紹,并且未概述其作為力傳感器的建模方法.因此,依據(jù)驅(qū)動(dòng)器與末端執(zhí)行器之間的彈性和阻尼特性,本文對(duì)SEA進(jìn)行分類(lèi),并詳細(xì)描述彈性和阻尼特性的機(jī)械實(shí)現(xiàn)方式,對(duì)其作為力傳感器的建模方法進(jìn)行介紹,以及描述其在機(jī)器人系統(tǒng)上的應(yīng)用,從而幫助設(shè)計(jì)人員提出適合應(yīng)用場(chǎng)景的SEA 設(shè)計(jì)方案.
文章首先介紹SEA 的發(fā)展背景,然后分4 部分對(duì)SEA 進(jìn)行介紹.第1 部分,依據(jù)SEA 的彈性和阻尼特性將其劃分為彈性型串聯(lián)彈性驅(qū)動(dòng)器(Elastic series elastic actuator,ESEA)、阻尼型串聯(lián)彈性驅(qū)動(dòng)器(Damped series elastic actuator,DSEA)以及彈性-阻尼型串聯(lián)彈性驅(qū)動(dòng)器(Elastic-damped series elastic actuator,E-DSEA),介紹各種SEA的優(yōu)缺點(diǎn),并詳細(xì)描述驅(qū)動(dòng)器與末端執(zhí)行器之間的彈性和阻尼特性的機(jī)械實(shí)現(xiàn)方式.第2 部分對(duì)不同種類(lèi)的SEA 作為力傳感器的建模方法進(jìn)行介紹.第3 部分?jǐn)⑹鯯EA 在機(jī)器人系統(tǒng)中的主要應(yīng)用,如力傳感器、安全保護(hù)、降低能耗.第4 部分展望SEA的未來(lái)發(fā)展方向.
1 串聯(lián)彈性驅(qū)動(dòng)器的機(jī)械實(shí)現(xiàn)方式
近年來(lái),研究人員針對(duì)不同應(yīng)用場(chǎng)景提出各種SEA 的機(jī)械設(shè)計(jì)方案.SEA 的機(jī)械實(shí)現(xiàn)方式不同,會(huì)引起系統(tǒng)的物理特性存在差別,進(jìn)而導(dǎo)致其在機(jī)器人系統(tǒng)中會(huì)產(chǎn)生不同的作用效果.例如,Chew 等基于磁流變液阻尼器設(shè)計(jì)一種表現(xiàn)為阻尼特性的SEA,相比于表現(xiàn)為彈性特性的SEA,其能夠消除系統(tǒng)震蕩[3].Hurst 等通過(guò)研究表現(xiàn)為彈性和阻尼特性的SEA 得出,相比于表現(xiàn)為彈性特性的SEA,其能夠提高系統(tǒng)的零運(yùn)動(dòng)力帶寬并避免震蕩[4].同時(shí),機(jī)械實(shí)現(xiàn)方式對(duì)SEA 的輸出力形式、體積以及制造成本等產(chǎn)生影響.因此,對(duì)SEA 的機(jī)械實(shí)現(xiàn)方式進(jìn)行介紹是有必要的.盡管SEA 的機(jī)械設(shè)計(jì)方案不同,但是系統(tǒng)表現(xiàn)的物理特性主要是彈性、阻尼或彈性-阻尼特性.因此,本節(jié)依據(jù)彈性和阻尼特性將SEA 劃分為ESEA、DSEA 和E-DSEA,分類(lèi)介紹其機(jī)械實(shí)現(xiàn)方式.
1.1 彈性型串聯(lián)彈性驅(qū)動(dòng)器
ESEA 是由電機(jī)(包含減速裝置)、彈性裝置、末端執(zhí)行器(負(fù)載端)、位置傳感器串聯(lián)而成,其負(fù)載端與電機(jī)之間表現(xiàn)彈性特性(圖1 為其示意簡(jiǎn)圖).ESEA 的彈性特性是通過(guò)彈性裝置實(shí)現(xiàn)的,是一種儲(chǔ)能元件,能夠降低電機(jī)與負(fù)載端的連接剛度,同時(shí)其形變量可以通過(guò)位置傳感器測(cè)得,從而獲得SEA的輸出力,使ESEA 具有抗沖擊、良好的反向驅(qū)動(dòng)能力、穩(wěn)定的力控制、儲(chǔ)存能量等優(yōu)點(diǎn).但是,此裝置降低了機(jī)械系統(tǒng)的零運(yùn)動(dòng)力帶寬(負(fù)載端的位置保持不變時(shí),力輸出能力),無(wú)法避免震蕩現(xiàn)象.
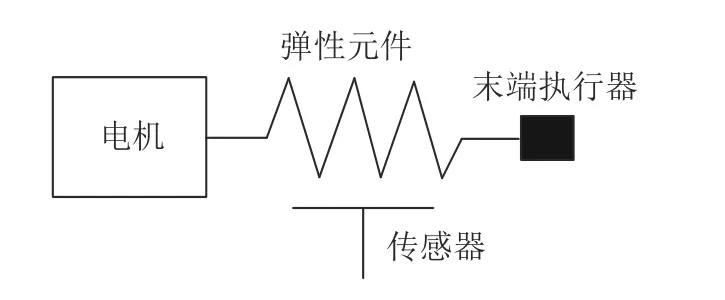
圖1 彈性型串聯(lián)彈性驅(qū)動(dòng)器的示意簡(jiǎn)圖Fig.1 Schematic diagram of elastic series elastic actuator
ESEA 的基本彈性元件主要是直線壓縮彈簧、直線拉伸彈簧、螺旋扭轉(zhuǎn)彈簧、結(jié)構(gòu)彈簧等金屬?gòu)椈?其彈性裝置可以是這些基本彈性元件,也可以是這些基本彈性元件的組合.直線壓縮彈簧、直線拉伸彈簧和螺旋扭轉(zhuǎn)彈簧是標(biāo)準(zhǔn)化彈簧,具有恒定的剛度系數(shù),都只能夠承受單向力,分別能夠承受軸向直線壓縮力、直線拉伸力、旋轉(zhuǎn)轉(zhuǎn)矩.而金屬結(jié)構(gòu)彈簧是定制化彈簧,可以設(shè)計(jì)變剛度系數(shù),能夠依據(jù)應(yīng)用場(chǎng)景的需要設(shè)計(jì)為單向或雙向受力,幾何形狀靈活多變.相比于標(biāo)準(zhǔn)化彈簧,金屬結(jié)構(gòu)彈簧具有空間適應(yīng)性強(qiáng)、結(jié)構(gòu)緊湊、輕量化、體積小、剛度系數(shù)可變等優(yōu)點(diǎn),但是設(shè)計(jì)復(fù)雜、成本高.基于以上基本彈性元件,設(shè)計(jì)人員提出各種ESEA 的機(jī)械實(shí)現(xiàn)方式,具體如下所述.
1)直線壓縮彈簧
基于直線壓縮彈簧的ESEA 的彈性裝置主要有:a)單個(gè)直線壓縮彈簧放置于電機(jī)與輸出端之間,輸出單向直線力(圖2(a)所示);b)為增大輸出力,多個(gè)直線壓縮彈簧并聯(lián)放置于電機(jī)和輸出端之間,輸出單向直線力(圖2(b)所示);c)輸出滑塊兩端對(duì)抗放置直線壓縮彈簧,輸出雙向直線力(圖2(c)所示);d) 兩個(gè)對(duì)抗放置的直線壓縮彈簧通過(guò)繩傳動(dòng)分別與輸出端和電機(jī)相連接,輸出雙向旋轉(zhuǎn)扭矩(圖2(d)所示);e)多個(gè)直線壓縮彈簧放置于兩個(gè)相對(duì)轉(zhuǎn)動(dòng)的同軸元件之間,輸出雙向旋轉(zhuǎn)扭矩(圖2(e)所示).例如,Hsieh 等設(shè)計(jì)了一款應(yīng)用于肩關(guān)節(jié)康復(fù)的單向力感知ESEA,其采用單個(gè)直線壓縮彈簧串聯(lián)于直線步進(jìn)電機(jī)和滑塊之間,通過(guò)壓縮彈簧產(chǎn)生單向直線輸出力[31].Lee 等把兩個(gè)直線壓縮彈簧并排放置于滾珠絲杠驅(qū)動(dòng)滑塊與輸出滑塊之間,增大ESEA 的單向直線輸出力且減小滾珠絲杠的長(zhǎng)度,應(yīng)用于起重輔助設(shè)備中[32].孫雷等把三個(gè)直線壓縮彈簧并排放置于圓弧軌道與輸出端之間,設(shè)計(jì)輸出非線性單向扭矩的ESEA[33].Rouse 等在滾珠絲杠輸出滑塊兩側(cè)對(duì)抗放置兩個(gè)直線壓縮彈簧,并通過(guò)繩傳動(dòng)驅(qū)動(dòng)輸出端,設(shè)計(jì)雙向直線輸出力的ESEA,應(yīng)用于膝關(guān)節(jié)假肢機(jī)器人[34].以上幾種彈性裝置均產(chǎn)生直線輸出力,而以下基于直線壓縮彈簧的彈性裝置可產(chǎn)生旋轉(zhuǎn)扭矩.例如,Agarwal等把兩個(gè)對(duì)抗配置的直線壓縮彈簧串聯(lián)于鋼絲繩之中,提出輸出雙向旋轉(zhuǎn)扭矩的ESEA.為保證鋼絲繩始終處于漲緊狀態(tài),兩個(gè)線性壓縮彈簧均以最大期望輸出力預(yù)緊[35].Tsagarakis 等采用兩個(gè)相對(duì)轉(zhuǎn)動(dòng)的同軸輸入輸出元件并對(duì)抗放置6 個(gè)直線壓縮彈簧,從而設(shè)計(jì)出一款應(yīng)用于小型仿人機(jī)器人的ESEA,輸出雙向旋轉(zhuǎn)扭矩[27].相似地,Marconi 等提出一款由兩個(gè)相對(duì)轉(zhuǎn)動(dòng)的同軸輸入輸出元件、對(duì)抗放置的4 組直線壓縮彈簧(每組包含4 個(gè)直線壓縮彈簧) 等元器件組成的ESEA.該ESEA 能夠輸出雙向旋轉(zhuǎn)扭矩,保證手部外骨骼機(jī)器人的柔順性[36].

圖2 基于直線壓縮彈簧的彈性裝置Fig.2 The elastic device based on linear compression spring
盡管直線壓縮彈簧僅能輸出單向直線力,但是通過(guò)對(duì)多個(gè)直線壓縮彈簧進(jìn)行合理配置,基于直線壓縮彈簧的ESEA 可產(chǎn)生單/雙向的直線力或旋轉(zhuǎn)扭矩.并排放置直線壓縮彈簧可以增大ESEA 的剛度系數(shù)從而提高其力帶寬、峰值輸出力/力矩以及減小直線壓縮彈簧長(zhǎng)度方向引起的尺寸增大,但是易導(dǎo)致大而重的彈性裝置且降低力/力矩測(cè)量精度.為保證高力帶寬和力/力矩測(cè)量精度,可以分段放置高低剛度直線壓縮彈簧,實(shí)現(xiàn)變剛度彈性裝置,即當(dāng)輸出力/力矩較小時(shí),采用低剛度彈簧實(shí)現(xiàn)高力/力矩測(cè)量精度;當(dāng)輸出力/力矩較大時(shí),采用高剛度彈簧實(shí)現(xiàn)高力帶寬.直線壓縮彈簧輸出旋轉(zhuǎn)扭矩時(shí),其扭轉(zhuǎn)剛度是由剛度系數(shù)和作用半徑的乘積獲得的,因此可以設(shè)計(jì)連續(xù)變化的作用半徑實(shí)現(xiàn)變扭轉(zhuǎn)剛度,保證ESEA 的力帶寬和力/力矩測(cè)量精度.值得注意的是,基于壓縮彈簧的ESEA 初始狀態(tài)所占空間即為最大空間,無(wú)需考慮工作過(guò)程中所需占用的空間.
2)直線拉伸彈簧
基于直線拉伸彈簧的彈性裝置與基于直線壓縮彈簧的彈性裝置相似,能夠產(chǎn)生直線輸出力和旋轉(zhuǎn)扭矩,主要有:a)多個(gè)直線拉伸彈簧并聯(lián)放置于電機(jī)與輸出端之間,輸出單向直線力(圖3(a)所示);b)輸出滑塊兩端對(duì)抗放置直線拉伸彈簧,輸出雙向直線力(圖3(b)所示);c)兩個(gè)對(duì)抗放置的直線拉伸彈簧通過(guò)繩傳動(dòng)分別與輸出端和電機(jī)相連接,輸出雙向旋轉(zhuǎn)扭矩(圖3(c)所示);d)多個(gè)直線拉伸彈簧放置于同軸的輪式輸入端和輪式輸出端之間,輸出雙向旋轉(zhuǎn)扭矩(圖3(d)所示).例如,Gim 等采用滾珠絲杠機(jī)構(gòu)把電機(jī)的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換為直線運(yùn)動(dòng),在絲杠輸出滑塊與末端執(zhí)行器之間并聯(lián)放置兩個(gè)直線拉伸彈簧,從而設(shè)計(jì)一款應(yīng)用于運(yùn)動(dòng)康復(fù)機(jī)構(gòu)的ESEA[37].Yu 等將兩個(gè)串聯(lián)于繩傳動(dòng)中的直線拉伸彈簧對(duì)抗配置在輸出滑塊兩端,設(shè)計(jì)雙向直線輸出力的ESEA[38?39].Rao 等把兩個(gè)對(duì)抗配置的直線拉伸彈簧串聯(lián)于鋼絲繩傳動(dòng)之中,鋼絲繩一端固定于輸出端上,另一端與驅(qū)動(dòng)器相連接,從而設(shè)計(jì)了一款輸出雙向旋轉(zhuǎn)扭矩的ESEA,應(yīng)用于靈巧手指中[40?41].文獻(xiàn)[42?43]把兩個(gè)對(duì)抗配置的直線拉伸彈簧放置于諧波減速器與輸出連桿之間,設(shè)計(jì)出一款輸出雙向旋轉(zhuǎn)扭矩的ESEA.Chen 等把多個(gè)直線拉伸彈簧放置于同軸的大輪子和小輪子之間,能夠產(chǎn)生雙向旋轉(zhuǎn)扭矩,從而提出一款應(yīng)用于肘部康復(fù)機(jī)器人的ESEA[44].

圖3 基于直線拉伸彈簧的彈性裝置Fig.3 The elastic device based on linear tension spring
與直線壓縮彈簧的ESEA 相似,基于直線拉伸彈簧的ESEA 也可以通過(guò)合理配置直線拉伸彈簧產(chǎn)生單/雙向直線輸出力或旋轉(zhuǎn)扭矩.通過(guò)并排放置多個(gè)直線拉伸彈簧可以增大系統(tǒng)剛度從而提高力帶寬和峰值輸出力,但是降低了力/力矩測(cè)量精度并且導(dǎo)致大而重的彈性裝置.相似地,分段采用高低剛度直線拉伸彈簧或者變化直線拉伸彈簧的工作半徑可以實(shí)現(xiàn)高力帶寬和力/力矩測(cè)量精度.特別地,基于拉伸彈簧的ESEA 初始狀態(tài)所占用的空間是最小空間,設(shè)計(jì)過(guò)程中需考慮其工作過(guò)程中所需占用的空間.
3)螺旋扭轉(zhuǎn)彈簧
基于螺旋扭轉(zhuǎn)彈簧的ESEA 的彈性裝置主要有:a)單個(gè)螺旋扭轉(zhuǎn)彈簧放置于電機(jī)與輸出端之間,輸出單向旋轉(zhuǎn)扭矩(圖4(a)所示);b)輸出端的兩端對(duì)抗放置螺旋扭轉(zhuǎn)彈簧,輸出雙向旋轉(zhuǎn)扭矩(圖4(b)所示).例如,Jung 等設(shè)計(jì)了一款基于螺旋扭轉(zhuǎn)彈簧的ESEA,其采用非對(duì)稱式繩傳動(dòng)機(jī)構(gòu)傳遞驅(qū)動(dòng)力矩,應(yīng)用于上肢康復(fù)外骨骼機(jī)器人中.螺旋扭轉(zhuǎn)彈簧串聯(lián)于驅(qū)動(dòng)端和負(fù)載之間,其輸入端的一邊采用電機(jī)驅(qū)動(dòng)而另一邊采用預(yù)拉伸的直線拉伸彈簧驅(qū)動(dòng),保證結(jié)構(gòu)的緊湊性[45].DeBoon 等把螺旋扭轉(zhuǎn)彈簧串聯(lián)于電機(jī)與差動(dòng)齒輪系之間,并采用干粉制動(dòng)器作為離合器,從而提出具有離合作用的ESEA,輸出單向旋轉(zhuǎn)力矩[46].Ates 等把螺旋扭轉(zhuǎn)彈簧串聯(lián)于舵機(jī)與末端執(zhí)行器之間,并把舵機(jī)、螺旋扭轉(zhuǎn)彈簧以及位置傳感器封裝在一起,從而設(shè)計(jì)出一種可應(yīng)用于矯形器、假肢或機(jī)器人手的ESEA[47].Agarwal等把兩個(gè)螺旋扭轉(zhuǎn)彈簧對(duì)抗配置于輸出端兩端,從而設(shè)計(jì)了一種輸出雙向旋轉(zhuǎn)扭矩的ESEA,應(yīng)用于手部康復(fù)外骨骼機(jī)器人上[48].

圖4 基于螺旋扭轉(zhuǎn)彈簧的彈性裝置Fig.4 The elastic device based on helical torsion spring
基于螺旋扭轉(zhuǎn)彈簧的ESEA 可以通過(guò)合理配置螺旋扭轉(zhuǎn)彈簧,產(chǎn)生單/雙向的旋轉(zhuǎn)扭矩,但是不能產(chǎn)生直線輸出力.其可采用高分辨率的位置傳感器和高剛度螺旋扭轉(zhuǎn)彈簧,實(shí)現(xiàn)系統(tǒng)的高力帶寬和力/力矩測(cè)量精度.相比于直線壓縮或拉伸彈簧,該彈性元件的徑向尺寸較大且剛度系數(shù)線性度差,因此該類(lèi)ESEA 需要考慮如何在有限的外徑內(nèi)實(shí)現(xiàn)高剛度以及因剛度非線性所造成的力/力矩測(cè)量誤差等問(wèn)題.
4)結(jié)構(gòu)彈簧
金屬結(jié)構(gòu)彈簧是定制化彈簧,其設(shè)計(jì)過(guò)程一般是首先由工程師依據(jù)實(shí)際需求確定設(shè)計(jì)目標(biāo)(如彈性元件尺寸、剛度系數(shù)等),然后確定一個(gè)能夠滿足上述要求的拓?fù)浣Y(jié)構(gòu),接著基于拓?fù)浣Y(jié)構(gòu)確定優(yōu)化目標(biāo)對(duì)彈性元件進(jìn)行優(yōu)化,最后實(shí)驗(yàn)測(cè)量彈性元件的參數(shù).例如,Carpino 等基于有限元分析采用迭代優(yōu)化方法設(shè)計(jì)輸出旋轉(zhuǎn)扭矩的金屬結(jié)構(gòu)彈簧(圖5(a)所示),應(yīng)用于下肢外骨骼機(jī)器人的ESEA,實(shí)現(xiàn)系統(tǒng)低剛度、緊湊和輕量化設(shè)計(jì)[49].Irmscher 等采用兩步優(yōu)化策略設(shè)計(jì)輸出單向旋轉(zhuǎn)扭矩的金屬結(jié)構(gòu)彈簧(圖5(b)所示),以滿足主動(dòng)矯正器機(jī)器人對(duì)扭轉(zhuǎn)彈簧的所有要求.首先為彈性元件確定合適的拓?fù)浣Y(jié)構(gòu),然后在有限元模型上以最小化馮米塞斯等效應(yīng)力為優(yōu)化目標(biāo)對(duì)其形狀、尺寸進(jìn)行優(yōu)化[50].Ruiken等采用彎曲梁理論對(duì)平面扭轉(zhuǎn)結(jié)構(gòu)彈簧進(jìn)行建模,進(jìn)而以最小化結(jié)構(gòu)彈簧重量為優(yōu)化目標(biāo)設(shè)計(jì)應(yīng)用于機(jī)器人系統(tǒng)的平面扭轉(zhuǎn)結(jié)構(gòu)彈簧[51](圖5(c)所示).相似地,文獻(xiàn)[52?60]也對(duì)輸出旋轉(zhuǎn)扭矩的金屬結(jié)構(gòu)彈簧進(jìn)行研究,所設(shè)計(jì)的結(jié)構(gòu)彈簧如圖5(d)~圖5(l)所示.Lee 等以最小化最大應(yīng)力為優(yōu)化目標(biāo)設(shè)計(jì)直線輸出力金屬結(jié)構(gòu)彈簧(圖5(m)所示),應(yīng)用于仿人型手腕機(jī)器人的ESEA 中[61].Bianchi 等基于拓?fù)鋬?yōu)化方法設(shè)計(jì)梁形金屬結(jié)構(gòu)彈簧(圖5(n)所示),其與手部外骨骼機(jī)器人的傳動(dòng)機(jī)構(gòu)相融合,使結(jié)構(gòu)緊湊[62].

圖5 基于結(jié)構(gòu)彈簧的彈性裝置Fig.5 The elastic device based on structural spring
基于金屬結(jié)構(gòu)彈簧的ESEA 能夠依據(jù)應(yīng)用需求輸出單/雙向直線輸出力或旋轉(zhuǎn)扭矩.結(jié)構(gòu)彈簧的剛度系數(shù)較高,具有較高的系統(tǒng)力帶寬,為了獲得高力/力矩測(cè)量精度,可采用高分辨率的位置傳感器.依據(jù)應(yīng)用需求,研究人員可優(yōu)化設(shè)計(jì)變剛度彈性元件實(shí)現(xiàn)高力帶寬和力/力矩測(cè)量精度,解決力帶寬和力/力矩測(cè)量精度之間的矛盾,同時(shí)可以對(duì)結(jié)構(gòu)彈簧的拓?fù)浣Y(jié)構(gòu)、體積、重量等進(jìn)行優(yōu)化選擇,實(shí)現(xiàn)ESEA 的小型化、輕量化.但是其設(shè)計(jì)制造過(guò)程復(fù)雜,導(dǎo)致成本高且應(yīng)用難度大.
1.2 阻尼型串聯(lián)彈性驅(qū)動(dòng)器
DSEA 是由電機(jī)、阻尼裝置、末端執(zhí)行器(負(fù)載端)、傳感器串聯(lián)而成,其負(fù)載端與電機(jī)之間表現(xiàn)阻尼特性(圖6 為其示意簡(jiǎn)圖).DSEA 的阻尼特性是通過(guò)阻尼裝置實(shí)現(xiàn)的,是一種耗能元件,兩端的相對(duì)速度變化可產(chǎn)生瞬時(shí)輸出力.與ESEA 相比,DSEA 具有高力帶寬、避免產(chǎn)生震蕩、力/力矩變化范圍大等優(yōu)點(diǎn)[3].但是DSEA 為獲得持續(xù)輸出力,需電機(jī)持續(xù)給系統(tǒng)輸入能量,傳動(dòng)效率低;同時(shí)系統(tǒng)受到?jīng)_擊載荷時(shí),會(huì)產(chǎn)生峰值較高的撞擊力,安全性差.

圖6 阻尼型串聯(lián)彈性驅(qū)動(dòng)器示意簡(jiǎn)圖Fig.6 Schematic diagram of damped series elastic actuator
關(guān)于DSEA 的主要工作有:Zhou 等設(shè)計(jì)了一款基于磁流變液阻尼器的DSEA(如圖7(a)所示),其存在的不足是為了獲得恒定的輸出力,電機(jī)必須始終消耗能量維持恒定的旋轉(zhuǎn)速度[63].磁流變液阻尼器把電機(jī)和負(fù)載端連接在一起,其兩端安裝兩個(gè)角位移傳感器來(lái)測(cè)量輸入角速度和輸出角速度,從而獲得輸出力大小.同時(shí)為了保證驅(qū)動(dòng)器輸出力與阻尼器兩端相對(duì)速度成正比關(guān)系,該文作者設(shè)計(jì)了一種特殊的線性化算法應(yīng)用到該驅(qū)動(dòng)器上.進(jìn)一步依據(jù)設(shè)計(jì)要求,該團(tuán)隊(duì)對(duì)DSEA 的關(guān)鍵參數(shù)以及阻尼器和電機(jī)的選擇方法進(jìn)行研究[64].Westerveld 等把直流電機(jī)和帶有阻尼流體的旋轉(zhuǎn)阻尼器(Kinetrol S-CRD,Kinetrol,Farnham,U.K.)串聯(lián)放置,從而提出一種應(yīng)用于卒中后功能康復(fù)訓(xùn)練末端機(jī)械手的DSEA(如圖7(b)所示)[65].

圖7 阻尼型串聯(lián)彈性驅(qū)動(dòng)器Fig.7 Damped series elastic actuator
目前為止,DSEA 的阻尼裝置主要是磁流變液阻尼器以及帶有阻尼流體的旋轉(zhuǎn)阻尼器,能夠輸出雙向旋轉(zhuǎn)扭矩.阻尼裝置也可以是摩擦阻尼器、電流變阻尼器等.阻尼裝置可以通過(guò)施加控制方法實(shí)現(xiàn)變阻尼系數(shù)以提高系統(tǒng)的力帶寬和力/力矩測(cè)量精度.但是因該種SEA能耗高、傳動(dòng)效率低,導(dǎo)致其在機(jī)器人系統(tǒng)中應(yīng)用較少,因此本節(jié)未對(duì)各種阻尼裝置進(jìn)行詳細(xì)描述.
1.3 彈性?阻尼型串聯(lián)彈性驅(qū)動(dòng)器
E-DSEA 的電機(jī)和末端執(zhí)行器之間表現(xiàn)彈性和阻尼特性,圖8 為其示意簡(jiǎn)圖.該類(lèi)驅(qū)動(dòng)器既有儲(chǔ)能作用也有耗能作用,負(fù)載端的輸出力能夠依據(jù)彈性?阻尼裝置的形變量和相對(duì)速度而獲得.其是ESEA和DSEA 的組合體,具有提高力控制的可靠性和可控性、系統(tǒng)零運(yùn)動(dòng)力帶寬、避免系統(tǒng)震蕩等特點(diǎn)[4].但是相比于ESEA,E-DSEA 在撞擊開(kāi)始時(shí)會(huì)產(chǎn)生一個(gè)力尖峰,易造成損害.

圖8 彈性?阻尼型串聯(lián)彈性驅(qū)動(dòng)器示意簡(jiǎn)圖Fig.8 Schematic diagram of elastic-damped series elastic actuator
E-DSEA 彈性和阻尼特性的機(jī)械實(shí)現(xiàn)方式主要有三種:1)采用具有彈性和阻尼特性的單元件(粘彈性元件),即單個(gè)元件表現(xiàn)為彈性和阻尼特性,串聯(lián)于電機(jī)和末端執(zhí)行器之間;2)把具有彈性特性的裝置和阻尼特性的裝置并聯(lián)起來(lái),形成彈性與阻尼元件并聯(lián)組合裝置,放置于電機(jī)和末端執(zhí)行器之間;3)把彈性元件放置于減速器之間或者減速器之前(彈性元件放置位置),利用彈性元件的彈性特性和電機(jī)或減速裝置的阻尼特性,從而實(shí)現(xiàn)E-DSEA 的彈性和阻尼特性.各種彈性和阻尼特性的機(jī)械實(shí)現(xiàn)方式的具體實(shí)現(xiàn)方案如下所述.
1)粘彈性元件
粘彈性元件包含基于有機(jī)非金屬材料彈簧(橡膠彈簧)和基于無(wú)機(jī)非金屬材料彈簧(玻璃纖維彈簧、碳纖維彈簧).其中橡膠彈簧是由橡膠材料(橡膠材料是一大類(lèi)化學(xué)成分不同但分子結(jié)構(gòu)和力學(xué)性能相似的材料的總稱)制成,玻璃纖維彈簧和碳纖維彈簧是由玻璃纖維、碳纖維等聚合物材料制成.
圓柱形、圓環(huán)形(圓錐形)、爪形(花瓣形)、方塊形等橡膠彈簧(圖9(a)~圖9(d)所示)已經(jīng)廣泛地應(yīng)用于E-DSEA 中.例如,Kim 等基于8 個(gè)圓柱形橡膠彈簧設(shè)計(jì)了一款應(yīng)用于仿人型機(jī)器人的EDSEA,其把橡膠彈簧放置于相對(duì)轉(zhuǎn)動(dòng)的同軸輸入/輸出件之間,通過(guò)電機(jī)帶動(dòng)輸入端壓縮圓柱形橡膠彈簧輸出雙向旋轉(zhuǎn)扭矩[66].Rollinson 等以實(shí)現(xiàn)均勻剪切應(yīng)力為目標(biāo),把圓環(huán)形橡膠彈簧優(yōu)化為圓錐形彈簧,該彈簧兩端與兩塊金屬薄片粘接在一起,金屬薄片分別與電機(jī)和負(fù)載端連接,從而設(shè)計(jì)出一款應(yīng)用于蛇形機(jī)器人的E-DSEA[67].Jarrett 等采用相對(duì)轉(zhuǎn)動(dòng)的同軸輸入/輸出件和爪形(花瓣形)橡膠彈簧等元件,設(shè)計(jì)了一款應(yīng)用于肘部外骨骼機(jī)器人的E-DSEA[68].Austin 等利用橡膠彈簧彈性系數(shù)非線性的特性,設(shè)計(jì)基于可變半徑凸輪和方塊形橡膠彈簧的E-DSEA,能夠?qū)崿F(xiàn)其低輸出扭矩的高測(cè)量精度和高輸出扭矩的高力帶寬[69].

圖9 粘彈性元件Fig.9 The viscoelastic elements
梁形玻璃纖維彈簧和碳纖維彈簧(圖9(e)所示)已經(jīng)被應(yīng)用于E-DSEA 中.例如,Shepherd 等通過(guò)滾珠絲杠把電機(jī)的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換為直線運(yùn)動(dòng),其輸出端通過(guò)梁形玻璃纖維彈簧與末端執(zhí)行器相連接,從而設(shè)計(jì)出一款應(yīng)用于膝關(guān)節(jié)外骨骼機(jī)器人的E-DSEA[70].Van Dijk 等把梁形碳纖維彈簧放置于踝足假肢機(jī)器人的傳動(dòng)鏈中,從而實(shí)現(xiàn)E-DSEA[71].文獻(xiàn)[72?74]也提出了基于各種聚合物梁形彈簧的E-DSEA.
類(lèi)似于金屬結(jié)構(gòu)彈簧,橡膠彈簧、玻璃纖維彈簧以及碳纖維彈簧是定制化元件,具有輕量化、體積小、結(jié)構(gòu)緊湊等特點(diǎn).玻璃纖維彈簧和碳纖維彈簧的幾何形狀多為梁形,可承受彎曲力;橡膠彈簧的幾何形狀靈活多變,可承受壓力、拉伸力以及剪切力.粘彈性元件具有彈性和阻尼特性,彈性系數(shù)是隨著形變量而變化的,因此研究人員利用變參數(shù)特性設(shè)計(jì)高力帶寬和力/力矩測(cè)量精度的E-DSEA.而其主要存在的問(wèn)題是橡膠彈簧等非金屬?gòu)椈删哂腥渥儭?yīng)力松弛等現(xiàn)象,存在靜力效應(yīng)和遲滯效應(yīng),導(dǎo)致其形變量與輸出力/力矩之間存在非線性關(guān)系;同時(shí)粘彈性元件的形變量與力/力矩之間的關(guān)系受到輸出幅值、頻率等因素影響,難于估計(jì)其輸出力/力矩,導(dǎo)致產(chǎn)生大的力/力矩估計(jì)誤差.
2)彈性與阻尼元件并聯(lián)組合裝置
彈性與阻尼元件并聯(lián)組合裝置是把第1.1 節(jié)介紹的各種彈性裝置與第1.2 節(jié)介紹的阻尼裝置并聯(lián)放置于電機(jī)和末端執(zhí)行器之間,從而設(shè)計(jì)出具有彈性和阻尼特性的裝置,應(yīng)用于E-DSEA 之中.例如,文獻(xiàn)[75?76]采用直線拉伸彈簧和機(jī)械阻尼器并聯(lián)組成彈性與阻尼元件并聯(lián)組合裝置,串聯(lián)于鋼絲繩傳動(dòng)之中,鋼絲繩一端與電機(jī)相連而另一端與負(fù)載端相連,實(shí)現(xiàn)設(shè)備與人的穩(wěn)定接觸(圖10(a)所示).Iwata 等利用扭轉(zhuǎn)桿作為彈性元件、旋轉(zhuǎn)阻尼器作為阻尼器,連接到電動(dòng)馬達(dá)與諧波傳動(dòng)裝置之間,從而設(shè)計(jì)出一種新的E-DSEA[77](圖10(b)所示).Garcia 等提出一種基于滾珠絲杠傳動(dòng)的E-DSEA,應(yīng)用于腿足式機(jī)器人中[78],其并聯(lián)組合裝置的彈性元件和阻尼元件分別是對(duì)抗放置于滾珠絲杠輸出滑塊兩端的直線壓縮彈簧和驅(qū)動(dòng)關(guān)節(jié)處的磁流變液旋轉(zhuǎn)阻尼器(圖10(c)所示).

圖10 基于彈性與阻尼元件并聯(lián)組合裝置的串聯(lián)彈性驅(qū)動(dòng)器Fig.10 Series elastic actuator based on parallel combination of elastic and damping elements
該具有彈性和阻尼特性的組合裝置是兩種特性元件的組合體,能夠輸出單/雙向直線輸出力或旋轉(zhuǎn)扭矩.依據(jù)彈性元件和阻尼元件具體形式,設(shè)計(jì)變彈性和阻尼系數(shù)以處理力帶寬和力/力矩測(cè)量精度之間的矛盾.同時(shí)高分辨率的位置傳感器能夠有效地提高力/力矩測(cè)量精度.相比于粘彈性元件,該裝置具有結(jié)構(gòu)復(fù)雜、所需安裝空間大、重量大等特點(diǎn),從而易導(dǎo)致機(jī)器人系統(tǒng)體積和重量大大增加.
3)彈性元件放置位置
E-DSEA 的彈性和阻尼特性可以通過(guò)改變彈性元件與減速器的相對(duì)位置,利用彈性元件的彈性特性和電機(jī)或減速器的阻尼特性來(lái)實(shí)現(xiàn).其機(jī)械實(shí)現(xiàn)方式主要有:a)彈性元件放置于減速器之前,即放置于電機(jī)和地面之間(圖11(a)所示)或者電機(jī)和減速器之間(圖11(b)所示);b)彈性元件放置于減速器內(nèi)部(圖11(c)所示).例如,文獻(xiàn)[79?81]把電機(jī)定子通過(guò)對(duì)抗放置的兩個(gè)直線壓縮彈簧與地面連接,其旋轉(zhuǎn)運(yùn)動(dòng)通過(guò)滾珠絲杠轉(zhuǎn)化為直線平動(dòng)運(yùn)動(dòng),提出具有緊湊性、輕量化、大功率的E-DSEA.Lens等把電機(jī)與地面固結(jié),在鋼絲繩–繩輪減速裝置之中放置直線拉伸彈簧,從而設(shè)計(jì)了應(yīng)用于機(jī)器人手臂的E-DSEA[82].Lee 等把行星齒輪的太陽(yáng)輪通過(guò)螺旋扭轉(zhuǎn)彈簧與地面相連接,即彈性元件放置于行星齒輪減速器之中,從而設(shè)計(jì)了一款基于彈性元件放置于減速器之中的E-DSEA[83].Lauria 等把空心電機(jī)與諧波減速器的波發(fā)生器相固連傳遞電機(jī)扭矩,采用螺旋扭轉(zhuǎn)彈簧將諧波減速器的柔輪與地面相連接,設(shè)計(jì)基于彈性元件放置于減速器之中的EDSEA[84].文獻(xiàn)[85?88]采用蝸輪蝸桿實(shí)現(xiàn)電機(jī)與末端執(zhí)行器的傳動(dòng),并在蝸輪蝸桿之間安裝螺旋扭轉(zhuǎn)彈簧,提出應(yīng)用于下肢康復(fù)機(jī)器人的E-DSEA.

圖11 基于彈性元件放置位置的彈性-阻尼型串聯(lián)彈性驅(qū)動(dòng)器示意簡(jiǎn)圖Fig.11 Schematic diagram of an elastic-damped series elastic actuator based on the placement position of the elastic element
彈性元件放置于電機(jī)與地面之間的E-DSEA因彈性元件不必隨負(fù)載運(yùn)動(dòng)而使結(jié)構(gòu)更緊湊,彈性元件剛度高以及系統(tǒng)阻尼可增大驅(qū)動(dòng)器力帶寬.但是其降低了對(duì)沖擊載荷的保護(hù),系統(tǒng)慣性等因素也致使力/力矩測(cè)量精度低,降低了力追蹤性能.彈性元件放置于電機(jī)和減速器之間或減速器之間的EDSEA 可以利用減速器力/力矩放大性能而采用低剛度彈性元件,減小彈性元件體積而使結(jié)構(gòu)緊湊,提高彈性元件的輸出力/力矩測(cè)量精度、對(duì)沖擊載荷的保護(hù)以及保證合理力帶寬.但是減速裝置的摩擦力等非線性因素使驅(qū)動(dòng)器的輸出力難于估計(jì),降低了力控制能力.
1.4 小結(jié)
表1 展示各類(lèi)SEA 的機(jī)械實(shí)現(xiàn)方式并進(jìn)行性能比較.ESEA、DSEA 和E-DSEA 分別表現(xiàn)彈性、阻尼和彈性?阻尼特性.彈性特性能夠儲(chǔ)存能量和釋放能量,而阻尼特性只能消耗能量,因此ESEA的能量效率最高,DSEA 的能量效率最低.在受到?jīng)_擊載荷下,DSEA 和E-DSEA 因存在阻尼特性而產(chǎn)生一個(gè)較大力尖峰值,易造成損害.ESEA 的安全保護(hù)性能較好,DSEA 和E-DSEA 的安全保護(hù)性能較差.各類(lèi)SEA 的柔性裝置降低了系統(tǒng)力帶寬而增加了系統(tǒng)柔性.DSEA 的系統(tǒng)力帶寬高于ESEA.E-DSEA因同時(shí)具有阻尼和彈性特性,因此其系統(tǒng)力帶寬要高于其他SEA.值得注意的是,各類(lèi)SEA 彈性或阻尼系數(shù)的選擇影響其系統(tǒng)力帶寬、力/力矩測(cè)量精度、抗沖擊保護(hù)能力.系統(tǒng)力帶寬與剛度和阻尼系數(shù)成正比,力/力矩測(cè)量精度與剛度和阻尼系數(shù)成反比而與位置傳感器的分辨率成正比,抗沖擊保護(hù)能力與剛度和阻尼系數(shù)成反比,因此剛度或阻尼系數(shù)越高,系統(tǒng)力帶寬越高而力/力矩測(cè)量精度、抗沖擊保護(hù)能力越低.針對(duì)兩者之間的矛盾,可以設(shè)計(jì)變阻尼或剛度系數(shù)的柔性裝置,實(shí)現(xiàn)高系統(tǒng)力帶寬和力/力矩測(cè)量精度;提高位置傳感器的分辨率也可以提高力/力矩測(cè)量精度.

表1 各類(lèi)串聯(lián)彈性驅(qū)動(dòng)器機(jī)械實(shí)現(xiàn)方式及比較Table 1 Mechanical realization and comparison of various series elastic actuators
2 建模方法
SEA 作為力傳感器應(yīng)用于機(jī)器人系統(tǒng)中,實(shí)現(xiàn)力控制.為精確感知SEA 的輸出力,研究者需對(duì)各種SEA作為力傳感器的輸出力模型進(jìn)行研究.其中,ESEA 作為力傳感器的原理是依據(jù)彈性元件的形變量與其輸出力成正比;DSEA 作為力傳感器的原理是依據(jù)阻尼元件兩端的相對(duì)速度與其輸出力成一定關(guān)系;E-DSEA 作為力傳感器的原理是依據(jù)彈性-阻尼裝置的形變量、相對(duì)速度或加速度與其輸出力的關(guān)系.各種SEA 作為力傳感器的模型依據(jù)實(shí)際情況存在差異,此處僅對(duì)SEA 的一般情況進(jìn)行介紹,并且提供依據(jù)實(shí)際情況的案例.
2.1 彈性型串聯(lián)彈性驅(qū)動(dòng)器建模方法
ESEA 作為力傳感器主要依據(jù)其彈性特性來(lái)實(shí)現(xiàn).依據(jù)前文所述,其彈性特性的實(shí)現(xiàn)方式主要是各種金屬?gòu)椈杉捌浣M合.因此,往往其輸出力矩T s與彈性元件的角形變量?θs之間成正比關(guān)系[89?93],即胡克定律

其中,k s表示金屬?gòu)椈傻膭偠认禂?shù).但是在對(duì)ESEA作為力傳感器進(jìn)行建模時(shí),研究人員需依據(jù)實(shí)際情況對(duì)胡克定律進(jìn)行修正和改進(jìn).例如,文獻(xiàn)[94]考慮ESEA 在裝配過(guò)程中和在使用過(guò)程中存在的不理想情況進(jìn)行建模.在裝配過(guò)程中,彈性元件的裝配位置和位置傳感器的讀數(shù)零位并不可能完全理想;在使用過(guò)程中,彈性元件的自然長(zhǎng)度等特性會(huì)隨之發(fā)生變化,導(dǎo)致彈性元件兩側(cè)的位置傳感器讀數(shù)之差并不一定等同于彈性元件的形變量.因此,文獻(xiàn)[94]將ESEA 作為力傳感器的建模分為三種情況.
1)理想彈性元件模型
在彈性元件符合理想彈性元件特性的情況下,ESEA 輸出力模型可以建立為(圖12 為理想彈性元件模型特性曲線):
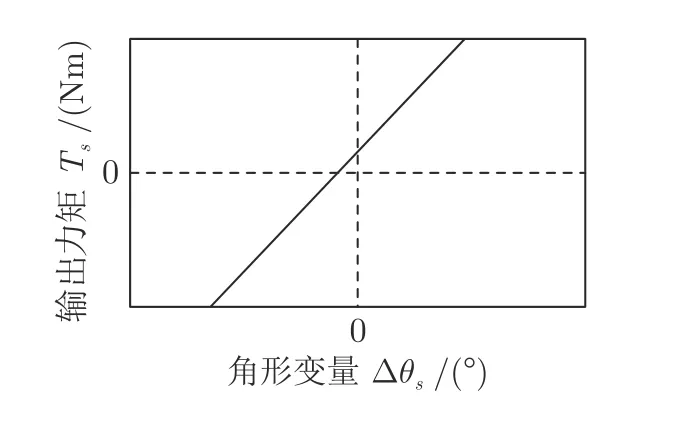
圖12 理想彈性元件模型特性曲線Fig.12 The characteristic curve of ideal elastic element

其中,T0為彈性元件兩端的位置差為0 時(shí)彈性元件的輸出力矩,代表彈性元件具有預(yù)壓縮量,將產(chǎn)生一個(gè)力矩偏移量.
2)具有間隙的彈性元件模型
當(dāng)ESEA 使用較長(zhǎng)時(shí)間后,其彈性元件的自然長(zhǎng)度(自由角度)發(fā)生改變,此時(shí)彈性元件與其他零件會(huì)存在間隙.因此在某一段區(qū)域中,其輸出力將為0.同時(shí),因?yàn)椴荒鼙WC驅(qū)動(dòng)器正向和反向受力的情況完全一致,因此在使用一段時(shí)間以后,彈性元件正向和反向的剛度系數(shù)會(huì)產(chǎn)生差別.此時(shí)需要采用不同剛度系數(shù)來(lái)表征彈性元件特性.圖13 展示具有間隙的彈性元件模型特性曲線,其輸出力的模型可以建立為:

圖13 具有間隙的彈性元件模型特性曲線Fig.13 The characteristic curve of elastic element with gap
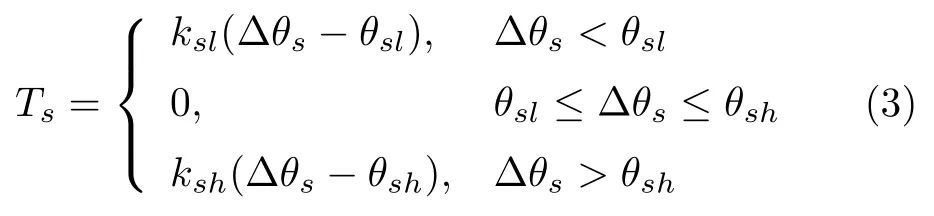
其中,θsl,θsh分別為彈性元件無(wú)作用力區(qū)域的下界和上界;ksl,ksh分別為碼盤(pán)讀數(shù)差值在小于、大于無(wú)作用力區(qū)域時(shí)彈性元件的剛度系數(shù).
3)具有預(yù)壓縮的彈性元件模型
在ESEA 安裝過(guò)程中,為了防止輸出力間隙特性出現(xiàn),所采取的措施是在安裝時(shí)將正向和反向的彈性元件進(jìn)行預(yù)壓縮.此時(shí)在零輸出力附近區(qū)域,輸出力是受到正向與反向的彈性元件共同作用產(chǎn)生的,而當(dāng)離開(kāi)這個(gè)區(qū)域時(shí),將只有單方向的彈性元件產(chǎn)生作用,其輸出力模型如圖14 所示.此時(shí)ESEA的輸出力模型為:

圖14 具有預(yù)壓縮的彈性元件模型特性曲線Fig.14 The characteristic curve of elastic element with pre-compressed

其中,θspl,θsph分別是彈性元件共同作用的下界和上界;kspc是共同作用區(qū)域彈性元件的剛度系數(shù);kspl,ksph分別是小于、大于共同作用區(qū)域時(shí)彈性元件的剛度系數(shù);Tsph,Tspl分別是在彈性元件共同作用區(qū)域與上、下單獨(dú)作用區(qū)域的臨界位置處,彈性元件具有的預(yù)壓縮力.
ESEA 主要是采用胡克定律對(duì)其輸出力/力矩與彈性元件的形變量之間的關(guān)系進(jìn)行建模.該方法只需要確定彈性元件的剛度系數(shù)以及彈性元件的形變量.特別地,直線壓縮彈簧、直線拉伸彈簧以及螺旋扭轉(zhuǎn)彈簧商業(yè)化程度高,剛度系數(shù)易于確定;結(jié)構(gòu)彈簧的剛度系數(shù)一般在實(shí)驗(yàn)測(cè)試過(guò)程中得到.但是彈性元件的安裝間隙、剛度系數(shù)時(shí)變、預(yù)緊力偏差等因素給確定模型參數(shù)帶來(lái)困難,造成建模精度偏差.因此需考慮這些因素對(duì)胡克定律進(jìn)行修正以提高模型的估計(jì)精度,或者制定詳細(xì)且合理的裝配調(diào)試方法以消除這些因素所帶來(lái)的建模誤差.
2.2 阻尼型串聯(lián)彈性驅(qū)動(dòng)器建模方法
DSEA 作為力傳感器是依據(jù)阻尼特性實(shí)現(xiàn)的.目前為止,DSEA 的阻尼裝置主要是通過(guò)磁流變液阻尼器實(shí)現(xiàn)的,其阻尼系數(shù)是變化的,力學(xué)模型可采用Bingham 粘塑性模型、Bingham 粘彈?塑性模型、Bouc-Wen 模型、Spencer 模型以及修正的Bouc-Wen 模型等來(lái)描述[95].例如,Bingham 粘塑性模型為T(mén)mK m?ωm+(T f+T(B))·sign(?ωd),其中T m為磁流變液阻尼器輸出力矩;Km為無(wú)電場(chǎng)時(shí)的阻尼系數(shù);?ωm為阻尼器兩端的相對(duì)速度;Tf為摩擦力矩;T(B) 代表變力矩,為磁通密度B的函數(shù).但是在DSEA 應(yīng)用過(guò)程中,設(shè)計(jì)人員將一種特殊的線性化算法應(yīng)用于磁流變液阻尼器中,線性化算法可以根據(jù)工作條件改變阻尼系數(shù),使其輸出力矩與阻尼器兩端的相對(duì)速度成正比例關(guān)系,簡(jiǎn)化輸出力矩模型[3].因此,DSEA 采用線性粘性阻尼法作為力傳感器的輸出力矩模型:

其中,T d為DSEA 的輸出力矩;b d為線性化阻尼裝置的阻尼系數(shù).
DSEA 采用線性粘性阻尼法進(jìn)行建模,該模型需要確定系統(tǒng)的阻尼系數(shù)以及阻尼器兩端的相對(duì)速度.機(jī)器人系統(tǒng)一般采用位置傳感器測(cè)得轉(zhuǎn)軸位移,對(duì)測(cè)得的數(shù)據(jù)進(jìn)行微分以獲得速度,因此該方法的計(jì)算量較大.驅(qū)動(dòng)器的速度波動(dòng)以及阻尼系數(shù)非線性等因素,導(dǎo)致模型參數(shù)難以確定,從而造成力/力矩估計(jì)誤差.
2.3 彈性?阻尼型串聯(lián)彈性驅(qū)動(dòng)器建模方法
E-DSEA 作為力傳感器主要依據(jù)彈性和阻尼特性綜合實(shí)現(xiàn).據(jù)前文所述,其機(jī)械實(shí)現(xiàn)方式主要有三種類(lèi)型.因每類(lèi)E-DSEA 實(shí)現(xiàn)彈性和阻尼特性的機(jī)械實(shí)現(xiàn)形式存在差別,使其作為力傳感器的模型存在差別,因此需對(duì)各類(lèi)E-DSEA 作為力傳感器的建模方法進(jìn)行分別描述.
1)粘彈性元件
粘彈性元件主要是橡膠彈簧、玻璃纖維彈簧和碳纖維彈簧.這些元件的剛度系數(shù)是變化的,能夠表現(xiàn)蠕變、應(yīng)力松弛等現(xiàn)象.同時(shí)其因具有阻尼特性而存在遲滯現(xiàn)象,即加載過(guò)程和卸載過(guò)程應(yīng)力-應(yīng)變特性曲線不重合.針對(duì)基于粘彈性元件的E-DSEA的模型建立方法主要有基于物理特性建模和基于實(shí)驗(yàn)觀測(cè)建模.基于物理特性建模是用彈簧和阻尼器組成的機(jī)械系統(tǒng)模擬各種彈性和阻尼特性元件的行為.基于實(shí)驗(yàn)觀測(cè)建模是通過(guò)在E-DSEA 上加上一系列事先確定的輸入信號(hào),激勵(lì)其輸出力發(fā)生改變,并通過(guò)力傳感器檢測(cè)其輸出力大小,運(yùn)用數(shù)學(xué)手段分析數(shù)據(jù)結(jié)構(gòu),進(jìn)而建立輸入與輸出之間的關(guān)系.
基于物理特性進(jìn)行建模的方法主要有胡克定律(圖15(a)所示)、Kelvin-Voigt 模型(圖15(b)所示)、Maxwell 模型(圖15(c)所示)、Standard Linear Solid 模型(圖15(d)所示)、Burger's 模型(圖15(e) 所示) 等方法[96?98].胡克定律、Kelvin-Voigt 模型、Maxwell 模型是最基本的模型.胡克定律是把粘彈性元件看作為彈性元件(金屬?gòu)椈?,與ESEA 的建模方法類(lèi)似.

圖15 基于具有彈性和阻尼特性元件物理特性的建模方法Fig.15 The modeling method of element with elastic and damping characteristics by the physical characteristics
Kelvin-Voigt 模型是把彈簧和阻尼器并聯(lián)起來(lái)組成的,其模型表達(dá)式為:

其中,σ為粘彈性元件的輸出應(yīng)力,E為粘彈性元件的彈性模量,η為粘彈性元件的粘性系數(shù),ε為粘彈性元件的應(yīng)變量.Kelvin-Voigt 模型的應(yīng)力松弛建模結(jié)果是需要一個(gè)瞬時(shí)無(wú)窮大的力使系統(tǒng)產(chǎn)生應(yīng)變量(圖16(a)所示),這不符合自然規(guī)律,因此該模型不能表現(xiàn)應(yīng)力松弛現(xiàn)象.其蠕變建模結(jié)果是給定一個(gè)恒定應(yīng)力,模型應(yīng)變量漸進(jìn)上升并趨于穩(wěn)定(圖16(b)所示).綜上所述,該模型能夠表示蠕變但不能表示應(yīng)力松弛.
Maxwell 模型是把彈簧和阻尼器串聯(lián)起來(lái)組成的,其模型表達(dá)式為:
Maxwell 模型的應(yīng)力松弛建模結(jié)果是給定一個(gè)應(yīng)變量,應(yīng)力漸進(jìn)下降并趨于穩(wěn)定(圖16(c)所示).其蠕變建模結(jié)果是給定恒定應(yīng)力,應(yīng)變量由一定初始形變量開(kāi)始沿某一斜率上升(圖16(d)所示),而實(shí)際彈性元件的形變量不能無(wú)限增大,因此該模型不能表現(xiàn)蠕變現(xiàn)象.綜上所述,該模型能夠表示應(yīng)力松弛但不能表示蠕變.

圖16 Kelvin-Voigt 模型和Maxwell 模型對(duì)應(yīng)力松弛和蠕變的建模結(jié)果[97]Fig.16 Stress relaxation and creep behaviour of the Kelvin-Voigt model and the Maxwell model[97]
Standard Linear Solid 模型、Burger's 模型以及其他更復(fù)雜的模型是上述基本模型的組合體,能夠表現(xiàn)蠕變和應(yīng)力松弛現(xiàn)象.值得注意的是,一個(gè)有更多元素的模型可以提供更高的建模精度,但是代價(jià)是數(shù)學(xué)模型更復(fù)雜且具有更高的階導(dǎo)數(shù).
基于實(shí)驗(yàn)觀測(cè)建模的方法主要有指數(shù)模型[99]、非線性間隙模型[100]、多項(xiàng)式模型[101]、黑盒建模法[102]及多種函數(shù)組合[66,68]等.首先根據(jù)阻尼和彈性特性元件的應(yīng)力-應(yīng)變曲線的影響因素(頻率、振幅等因素)確定E-DSEA 的輸入信號(hào),然后通過(guò)力傳感器記錄其輸出力,最后確定數(shù)學(xué)模型,并依據(jù)輸入-輸出數(shù)據(jù)使用優(yōu)化方法確定數(shù)學(xué)模型中的參數(shù).例如,文獻(xiàn)[66]采用幅值不同的信號(hào)作為輸入,記錄驅(qū)動(dòng)器系統(tǒng)相應(yīng)的輸出,其輸入-輸出的特性曲線如圖17所示.采用多項(xiàng)式函數(shù)描述其加載過(guò)程,采用的三階多項(xiàng)式形式如下:

圖17 基于粘彈性元件串聯(lián)彈性驅(qū)動(dòng)器角形變量與輸出力矩曲線[66]Fig.17 The curves of angle deformation and output torque of an series elastic actuator based on viscoelastic element[66]

其中,三階多項(xiàng)式函數(shù)由參數(shù)p1、p2、p3和p4表示,Tload為E-DSEA 加載過(guò)程的輸出力矩,?為粘彈性元件的角形變量.應(yīng)用指數(shù)函數(shù)描述其卸載過(guò)程,采用的指數(shù)函數(shù)形式如下:

其中,指數(shù)函數(shù)由參數(shù)a、b、c和d表示,滿足彈性體的超彈性性能;Tunload為E-DSEA 卸載過(guò)程的輸出力矩.加載過(guò)程和卸載過(guò)程的轉(zhuǎn)換是通過(guò)載荷方向的變化來(lái)判斷的,加載和卸載過(guò)程的過(guò)渡階段是通過(guò)恒定剛度的胡克定律來(lái)描述.
橡膠彈簧等非金屬?gòu)椈傻膭偠认禂?shù)是隨著形變量而變化的,其阻尼特性導(dǎo)致遲滯現(xiàn)象以及存在的應(yīng)力松弛、蠕變現(xiàn)象使其輸出力模型為非線性模型,所需確定的模型參數(shù)多.模型參數(shù)隨著輸出力/力矩峰值、頻率等因素的變化而變化,并且各個(gè)非金屬?gòu)椈傻哪P蛥?shù)因制造加工過(guò)程的差異而不同.這些因素導(dǎo)致難以建立基于粘彈性元件的E-DSEA的力/力矩估計(jì)模型.相比于ESEA 和DSEA 的估計(jì)模型,其輸出力估計(jì)模型所需計(jì)算量大.
2)彈性與阻尼元件并聯(lián)組合裝置
彈性與阻尼元件并聯(lián)組合裝置是由阻尼器和彈性元件并聯(lián)組合而成.因此其力傳感器的模型為彈性和阻尼所產(chǎn)生力的相加,具體形式可根據(jù)阻尼器和彈性元件具體性質(zhì)得出.其一般化的模型可以表示為[103]:

其中,Tsd為E-DSEA 的輸出力矩,bsd為彈性與阻尼元件并聯(lián)組合裝置中阻尼元件的阻尼系數(shù),?ωsd為其阻尼器兩端的相對(duì)速度,ksd為彈性與阻尼元件并聯(lián)組合裝置中彈性元件的剛度系數(shù),?θsd為其彈性元件的角形變量.
基于彈性與阻尼元件并聯(lián)組合裝置的E-DSEA力/力矩模型需要確定阻尼系數(shù)和剛度系數(shù).類(lèi)似于ESEA 和DSEA 的建模方法,該模型需要克服彈性元件的安裝間隙、阻尼系數(shù)與剛度系數(shù)不準(zhǔn)確性、速度波動(dòng)等因素所導(dǎo)致的估計(jì)誤差,對(duì)模型進(jìn)行修正.
3)彈性元件放置位置
基于彈性元件放置位置的E-DSEA 主要存在兩種機(jī)械實(shí)現(xiàn)方式.該類(lèi)型E-DSEA 的彈性特性是由彈性元件實(shí)現(xiàn)的,而阻尼特性是由電機(jī)或減速器的自身阻尼實(shí)現(xiàn)的.特別地,此類(lèi)SEA 作為力傳感器的模型需考慮電機(jī)或減速器的慣性特性,以及彈性元件與末端執(zhí)行器之間減速器的減速比.因此其作為力傳感器的模型應(yīng)該是彈性、阻尼、慣性以及減速比的組合形式.
文獻(xiàn)[104]介紹了一種彈性元件放置于減速器之前的E-DSEA,并分析其作為力傳感器的模型.EDSEA 的輸出力矩Tpb與放置于電機(jī)與地面之間的彈性元件剛度系數(shù)kpb、電機(jī)轉(zhuǎn)子及減速器轉(zhuǎn)動(dòng)部分的慣量Jpb以及阻尼系數(shù)Bpb有關(guān),其作為力傳感器的模型為:

其中,N為減速器的減速比,θs為 彈性元件的角形變量.
文獻(xiàn)[83]提出一種彈性元件放置于行星齒輪的太陽(yáng)輪與地面之間的E-DSEA,并分析其作為力傳感器的模型.E-DSEA 的輸出力矩Tpm與放置于太陽(yáng)輪與地面之間的彈性元件剛度系數(shù)kpm、減速器轉(zhuǎn)動(dòng)部分的慣量Jpm以及阻尼系數(shù)Bpm有關(guān),其作為力傳感器的模型為:

基于彈性元件放置位置的力學(xué)模型需要確定電機(jī)或減速器的轉(zhuǎn)動(dòng)慣量、阻尼系數(shù)、減速比以及彈性元件的剛度系數(shù).其中減速裝置的摩擦力、間隙等因素易造成參數(shù)的不準(zhǔn)確性,導(dǎo)致估計(jì)誤差.
2.4 小結(jié)
表2 展示了各類(lèi)SEA 的建模方法及特點(diǎn).ESEA和DSEA 的基本建模方法主要是線性模型,分別采用胡克定律和線性粘性阻尼法進(jìn)行建模,都只需要確定一個(gè)模型參數(shù).E-DSEA 依據(jù)實(shí)現(xiàn)方式不同而具有不同的建模方法,各種建模方法都需要確定多個(gè)模型參數(shù),較復(fù)雜.基于粘彈性元件的E-DSEA主要是采用Maxwell 模型等物理建模法和指數(shù)模型等實(shí)驗(yàn)建模法;基于彈性和阻尼元件并聯(lián)組合裝置的E-DSEA 采用胡克定律和線性粘性阻尼法相疊加進(jìn)行建模;基于彈性元件放置位置的E-DSEA依據(jù)系統(tǒng)動(dòng)力學(xué)對(duì)輸出力進(jìn)行估計(jì).

表2 各類(lèi)串聯(lián)彈性驅(qū)動(dòng)器建模方法Table 2 Modeling methods of various series elastic actuators
3 串聯(lián)彈性驅(qū)動(dòng)器在機(jī)器人系統(tǒng)中的應(yīng)用
SEA 作為一種模擬人或者其他動(dòng)物肌肉組織的柔順性驅(qū)動(dòng)器,廣泛地應(yīng)用于機(jī)器人系統(tǒng)中,大大提高了機(jī)器人對(duì)非結(jié)構(gòu)化、復(fù)雜化環(huán)境的適應(yīng)能力.文章介紹SEA 最常見(jiàn)的幾種應(yīng)用,分別是力傳感器、安全保護(hù)以及降低能耗.特別地,DSEA 表現(xiàn)為阻尼特性,不具備降低能耗的作用.
3.1 力傳感器
隨著機(jī)器人面對(duì)的環(huán)境向著非結(jié)構(gòu)化、復(fù)雜化發(fā)展,SEA 作為力傳感器應(yīng)用于仿人型機(jī)器人、腿足式機(jī)器人等系統(tǒng)中,感知機(jī)器人與外界的交互力大小,增強(qiáng)機(jī)器人對(duì)復(fù)雜環(huán)境的處理能力,同時(shí)有助于解決帶有力傳感器的機(jī)器人系統(tǒng)體積大、重量大以及成本高等問(wèn)題.SEA 所測(cè)得的輸出力能夠作為機(jī)器人力控制的反饋量,實(shí)現(xiàn)力控制.具體地,SEA通過(guò)在彈性元件或阻尼器兩端安裝位置傳感器,測(cè)量彈性元件的形變量或阻尼器兩端的相對(duì)速度,得到其輸出力,從而將原力控制問(wèn)題轉(zhuǎn)化為位移控制問(wèn)題.目前為止,研究人員已經(jīng)提出多種基于SEA的力控制方法,例如帶有擾動(dòng)觀測(cè)器的比例積分微分(Proportional integral derivative,PID)控制法[105],魯棒控制法[106],基于加速器的魯棒運(yùn)動(dòng)控制法[107],修正模型參考自適應(yīng)控制法[108],模型逆時(shí)延控制法[85]等.一般而言,力控制可以采用電流環(huán)控制電機(jī)驅(qū)動(dòng)力,再經(jīng)齒輪等傳動(dòng)系統(tǒng)輸出期望力,或者可以采用位置環(huán)或速度環(huán)控制電機(jī)位移、速度等運(yùn)動(dòng)量,再經(jīng)齒輪等傳動(dòng)系統(tǒng)控制SEA柔性元件的形變量或相對(duì)速度而輸出期望力.因齒輪等傳動(dòng)系統(tǒng)中存在的摩擦力等噪聲相比于位移等運(yùn)動(dòng)量難于估計(jì),因此與基于電流環(huán)的力控制相比,把SEA 應(yīng)用于力控制中,能夠大大提高控制精度.
3.2 安全保護(hù)
SEA 具有被動(dòng)柔順性,能夠?qū)崿F(xiàn)機(jī)器人與外界的沖擊保護(hù),提高機(jī)器人與人交互的友好性[109].當(dāng)剛性機(jī)器人與具有高慣量的剛體發(fā)生快速碰撞時(shí),機(jī)器人與剛體之間會(huì)產(chǎn)生持續(xù)極短的高峰值撞擊力[110].因機(jī)器人存在慣性特性,無(wú)法通過(guò)控制方法消除撞擊力,因此機(jī)器人本身需具備緩沖或吸收沖擊的能力.不同于采用剛性驅(qū)動(dòng)器與末端執(zhí)行器直接相連的剛性機(jī)器人,基于SEA 的機(jī)器人能夠利用具有彈性或阻尼特性裝置,實(shí)現(xiàn)電機(jī)與末端執(zhí)行器的解耦,吸收或者緩沖機(jī)器人與外界的撞擊沖擊.
當(dāng)機(jī)器人與外界的撞擊所產(chǎn)生的撞擊力高于具有彈性或阻尼特性裝置的承受范圍時(shí),需要通過(guò)設(shè)計(jì)控制器控制機(jī)器人作出反應(yīng),即通過(guò)控制電機(jī)沿著機(jī)器人所受到的撞擊力方向驅(qū)動(dòng)末端執(zhí)行器以撞擊后的速度運(yùn)動(dòng),防止超過(guò)具有彈性或阻尼特性裝置的無(wú)源偏轉(zhuǎn)極限.無(wú)源偏轉(zhuǎn)極限是指電機(jī)和末端執(zhí)行器之間的具有彈性或阻尼特性裝置所能產(chǎn)生的最大形變量.需要注意的是,DSEA 不存在無(wú)源偏轉(zhuǎn)極限,因此無(wú)需為其設(shè)計(jì)控制算法緩沖撞擊.一般來(lái)說(shuō),SEA 的無(wú)源偏轉(zhuǎn)極限在幾度范圍內(nèi),能夠大大增加機(jī)器人運(yùn)動(dòng)反應(yīng)所需要的時(shí)間.與剛性機(jī)器人的力矩控制相比,這將降低控制器和電機(jī)的力帶寬需求.當(dāng)然,SEA 的無(wú)源偏轉(zhuǎn)極限越大,其抗沖擊保護(hù)作用越好,但是這將使SEA 的零運(yùn)動(dòng)力帶寬偏小,因此這是一個(gè)工程權(quán)衡問(wèn)題,而不是單方面的最小化.
3.3 降低能耗
ESEA 和E-DSEA 都具有彈性特性,能夠利用其彈性元件實(shí)現(xiàn)儲(chǔ)存能量和釋放能量,從而降低機(jī)器人的能源消耗以及電機(jī)的峰值力矩[111].剛性機(jī)器人的能量流動(dòng)是電機(jī)接收到電池或者驅(qū)動(dòng)器的電能,然后將其轉(zhuǎn)化為電機(jī)以及末端執(zhí)行機(jī)構(gòu)的機(jī)械能和熱能,這部分能量被耗散.而基于彈性特性SEA的機(jī)器人能量流動(dòng)是電機(jī)接收到電池或者驅(qū)動(dòng)器的電能,一部分能量轉(zhuǎn)化為電機(jī)的機(jī)械能和熱能被耗散,另一部分傳遞給彈性裝置.彈性裝置可以儲(chǔ)存這部分能量,也可以傳遞給末端執(zhí)行機(jī)構(gòu),從而通過(guò)合理利用儲(chǔ)存的能量能夠降低機(jī)器人系統(tǒng)的能量損耗.特別地,腿足式機(jī)器人在跳躍過(guò)程中利用基于彈性特性SEA 的儲(chǔ)能特性,在相同的跳躍高度時(shí)能夠有效地降低機(jī)器人的能源損耗以及減小電機(jī)的峰值力矩[11].當(dāng)腿足式機(jī)器人從飛行狀態(tài)向支撐狀態(tài)過(guò)渡時(shí),基于彈性特性SEA 的彈性元件受到?jīng)_擊產(chǎn)生形變量,機(jī)械能作為彈性勢(shì)能被儲(chǔ)存.當(dāng)腿足式機(jī)器人從支撐狀態(tài)向飛行狀態(tài)轉(zhuǎn)變時(shí),基于彈性特性SEA 的彈性元件形變量減小,其儲(chǔ)存的彈性勢(shì)能轉(zhuǎn)化為機(jī)器人的機(jī)械能.從而,腿足式機(jī)器人在跳躍過(guò)程中能夠減少所需的能量以及降低電機(jī)的峰值力矩.相似地,腿足式機(jī)器人在行走過(guò)程中,利用基于彈性特性SEA 彈性元件的儲(chǔ)能作用,也能有效地降低機(jī)器人能耗.
4 串聯(lián)彈性驅(qū)動(dòng)器的未來(lái)發(fā)展方向
隨著機(jī)器人面對(duì)的環(huán)境向著非結(jié)構(gòu)化、復(fù)雜化發(fā)展,SEA 作為一種模擬生物肌肉的柔順性驅(qū)動(dòng)器,能夠克服傳統(tǒng)機(jī)器人采用剛性驅(qū)動(dòng)器的不足,從而對(duì)于提高機(jī)器人對(duì)復(fù)雜環(huán)境的適應(yīng)能力具有積極意義.盡管SEA 已經(jīng)廣泛地應(yīng)用于機(jī)器人系統(tǒng)中,但是SEA 仍然面臨著輕量化、小型化、精確力感知、參數(shù)選擇等方面的不足.因此仍需要對(duì)SEA的幾個(gè)方面展開(kāi)研究.
4.1 輕量化、小型化以及降低成本
SEA 廣泛地應(yīng)用于外骨骼機(jī)器人、仿人型機(jī)器人、假肢機(jī)器人等系統(tǒng)中,因這些機(jī)器人需要穿戴于人體上或者外形及重量像一個(gè)成年人或者更小,其尺寸和重量是非常有限的.而在機(jī)器人中SEA的重量和體積是一個(gè)主要因素.因此,SEA 必須實(shí)現(xiàn)輕量化、小型化,以適應(yīng)這樣的系統(tǒng).與剛性驅(qū)動(dòng)裝置相比,SEA 因增加柔性裝置以及位置傳感器,導(dǎo)致其體積、重量以及成本較高.合適的柔性裝置對(duì)實(shí)現(xiàn)SEA 的小型化、輕量化以及降低成本是有積極作用的.橡膠彈簧等非金屬?gòu)椈梢蚓哂袆偠?體積比和剛度-質(zhì)量比高的特點(diǎn),有利于實(shí)現(xiàn)SEA 小型化、輕量化.但是現(xiàn)有的設(shè)計(jì)方法未對(duì)橡膠彈簧等非金屬?gòu)椈蛇M(jìn)行優(yōu)化,因此需要像設(shè)計(jì)金屬結(jié)構(gòu)彈簧一樣,依據(jù)SEA 的應(yīng)用要求,對(duì)橡膠彈簧的拓?fù)浣Y(jié)構(gòu)及尺寸參數(shù)進(jìn)行優(yōu)化選擇.相比于標(biāo)準(zhǔn)化彈簧,橡膠彈簧等非金屬?gòu)椈墒嵌ㄖ苹瘡椈?設(shè)計(jì)復(fù)雜且成本高,阻礙其廣泛應(yīng)用于SEA 中.因此,研究標(biāo)準(zhǔn)化橡膠彈簧等非金屬?gòu)椈赏負(fù)浣Y(jié)構(gòu)及尺寸參數(shù)的優(yōu)化設(shè)計(jì)方法,促進(jìn)SEA 的小型化、輕量化以及降低設(shè)計(jì)成本,是一個(gè)有待探究的問(wèn)題.
4.2 精確力感知模型研究
橡膠彈簧的輸出輸入特性會(huì)受到頻率、振幅、預(yù)緊力等因素影響,存在遲滯現(xiàn)象,這引入了粘彈性非線性,使E-DSEA 的精確力感知和控制復(fù)雜化.為了實(shí)現(xiàn)基于橡膠彈簧E-DSEA 的精確力控制并提高機(jī)器人與外界環(huán)境安全交互的質(zhì)量,必須有一個(gè)考慮影響橡膠彈簧輸出輸入特性的所有因素且定義良好的精確力感知模型.盡管研究者已經(jīng)提出了各種遲滯建模方法來(lái)解決橡膠彈簧的遲滯問(wèn)題,但是受限于未考慮影響橡膠彈簧輸出輸入特性的各個(gè)因素以及模型非線性擬合局限性,它們對(duì)于執(zhí)行精確的力矩控制還不夠精確.近年來(lái),神經(jīng)網(wǎng)絡(luò)、模糊系統(tǒng)、支撐向量機(jī)等智能建模方法對(duì)非線性系統(tǒng)建模取得了良好的效果.因此,研究如何綜合考慮頻率、振幅、預(yù)緊力等影響因素,利用智能化方法對(duì)基于橡膠彈簧E-DSEA 的遲滯非線性現(xiàn)象進(jìn)行建模,實(shí)現(xiàn)精確感知機(jī)器人與外界環(huán)境的交互力,是一個(gè)值得研究的方向.
4.3 參數(shù)選擇
SEA 的彈性系數(shù)和阻尼系數(shù)對(duì)提高人與機(jī)器人交互的安全性、零運(yùn)動(dòng)力帶寬、力傳感器的分辨率,減小能量損耗、電機(jī)的峰值力矩以及避免系統(tǒng)震蕩具有決定性作用.Nieto 等設(shè)計(jì)一種以系統(tǒng)能量損耗和電機(jī)的峰值力矩最小化為目標(biāo)的非參數(shù)凸優(yōu)化方法來(lái)決定SEA 的彈性系數(shù)[111].Roozing 等基于關(guān)節(jié)應(yīng)用要求提出了一種以最大化系統(tǒng)的零運(yùn)動(dòng)力帶寬為目標(biāo)的SEA 最佳彈性系數(shù)選擇準(zhǔn)則[112].盡管這些參數(shù)優(yōu)化方法已經(jīng)對(duì)SEA 的參數(shù)選擇提供解決方案,但是現(xiàn)有方法僅以SEA 幾個(gè)應(yīng)用性能為目標(biāo)進(jìn)行優(yōu)化.因此依據(jù)應(yīng)用需求,綜合考慮SEA在機(jī)器人系統(tǒng)中的各種性能,優(yōu)化設(shè)計(jì)SEA 彈性系數(shù)和阻尼系數(shù),使SEA 最大化提高機(jī)器人性能,是未來(lái)需要開(kāi)展的研究方向.
5 結(jié)束語(yǔ)
本文首先依據(jù)彈性和阻尼特性把SEA 劃分為三種類(lèi)型,介紹各類(lèi)SEA 在避免系統(tǒng)震蕩、零運(yùn)動(dòng)力帶寬等方面的優(yōu)缺點(diǎn),詳細(xì)概述各類(lèi)SEA 的彈性和阻尼特性的機(jī)械實(shí)現(xiàn)方式.除了DSEA 發(fā)展較慢外,其他兩種SEA 的機(jī)械實(shí)現(xiàn)方式都得到充分發(fā)展.然后依據(jù)各類(lèi)SEA 表現(xiàn)的物理特性以及機(jī)械實(shí)現(xiàn)方式不同,對(duì)SEA 作為力傳感器的一般建模方法及其典型案例進(jìn)行敘述,以輔助設(shè)計(jì)者對(duì)SEA 進(jìn)行建模.最后本文介紹了SEA 在機(jī)器人系統(tǒng)中作為力傳感器、安全保護(hù)以及降低能耗等方面的應(yīng)用,并討論了SEA 在小型化、輕量化、力感知模型以及參數(shù)選擇等方面所需要進(jìn)一步開(kāi)展的研究?jī)?nèi)容.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19