進化計算在復雜機電系統設計自動化中的應用綜述
2021-08-28 04:55:20范衠朱貴杰李文姬游煜根李曉明林培涵辛斌
自動化學報 2021年7期
范衠 朱貴杰 李文姬 游煜根 李曉明 林培涵 辛斌
機電系統是一類由機械、電子、氣動、液壓和控制系統相互作用而組成的復雜系統,它融合了機械、電子、計算機及信息技術的優勢,將多個子系統進行有機融合.它的涵蓋面極廣,已滲入到我們生活中的方方面面.如汽車、手機等,都可以認為是機電系統的典型代表.其他典型的機電系統還包括工業機器人、無人機、機電系統設備等等.其中機電系統設備是制造業的基礎,目前已大量應用于工業制造、農業生產和國防科技等領域,幫助人們完成重復、繁重和危險的工作.2015 年5 月8 日,國務院正式發布實施《中國制造2025》,明確提出了將“高檔數控機床和機器人”作為大力推動的重點領域之一[1].在中國的制造能力不斷提升的情況下,提升我國機電系統的設計水平,關鍵在于提出一套能夠系統地持續優化機電系統的設計自動化方法.
機電系統設計是一類不同于常規機械、電子和液壓系統的多能域物理系統的設計問題,在其設計過程中,需要融合多種類型的能量轉換行為[2],并在系統中還可能包含如連續的或離散的控制器,因此機電系統設計自動化(Mechatronic design automation,MDA)的研究需要考慮多能域物理系統的控制器和被控對象的自動并行設計.由于此類系統的強耦合性和復雜性,對機電系統的設計往往比較困難.傳統的設計方法通常依賴于工程人員長期的經驗積累和探索,不僅設計周期長、需要進行頻繁修改,而且不能保證所設計的機電系統性能是全局最優的.
機電系統設計自動化是指采用智能的優化設計方法對機電系統進行人機協同的自動設計.具體而言,是在數字孿生體系[3?5]結構下,借助機器學習和進化計算等人工智能技術在知識處理和模型優化上的強大能力,有效地支持設計人員進行系統化的機電系統設計優化.設計自動化能提供強大的人機交互功能,使人機協同的混合增強智能[6?7]成為可能.此外,機電系統設計自動化也是知識自動化的一個重要分支.知識自動化是驅動未來經濟發展的一項顛覆性技術[8].它通過把各種工業技術體系模型化,然后將模型移植到智能設計與制造平臺上,并通過平臺來驅動各種軟件,包括設計、仿真、計算、試驗、制造系統等,從而可以由機器完成原先需要人去完成的大部分工作,而由人完成高級的創造性、決策性工作.其中,在智能設計與制造平臺中各部分的關系如圖1 所示,通過數據連接與驅動使各軟件系統協同作用,可自上而下地實現產品或系統從設計到生產制造的整個過程.在該過程中,通過將專家體系和知識庫中的知識融入到各軟件系統的處理過程,以及將各軟件系統處理過程中產生的大量數據進行提取、挖掘從而形成及豐富相應的庫,如此不斷地迭代可以使產品或系統的整個設計-制造過程更加高效化、而所得到的產品或系統也更加智能化.因此,在知識自動化體系下開展機電系統的設計自動化研究與應用是一項非常有意義的工作.

圖1 智能設計與制造平臺中各部分間的關系圖Fig.1 The relationship between the components of the intelligent design and manufacturing platform
機電系統的設計優化既包含拓撲結構的優化又包含參數的優化,設計變量既包括離散變量(如電機和減速器的選型)也包含連續變量(如機電系統的幾何尺寸),設計目標通常包含多個相互沖突的目標(如系統能耗、工作效率等),約束條件通常是相互交叉耦合的.機電系統的設計優化問題可以描述為一類帶約束的多目標優化問題,即
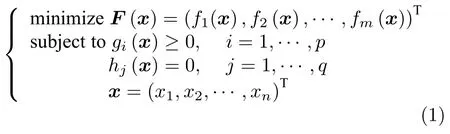
其中,F(x)(f1(x),···,f m(x))T為一個m維的目標向量,gi(x)≥0 和hj(x)0 分別為不等式約束和等式約束,p和q分別為不等式約束和等式約束的個數,x(x1,x2,···,x n)T為決策向量,x1,x2,···,x n為n個設計變量.等式約束可以通過一個極小值σ >0轉變為不等式約束,即

針對實際工程設計優化問題,尤其是涉及離散變量的優化問題時,其設計目標和約束條件通常不具備連續可微的特點[9?10],造成傳統的優化方法無法很好地求解這類優化問題.例如,當多目標優化問題的目標之間的沖突關系為非凸形狀時,傳統的優化方法只能夠獲得整個最優解集中的兩個端點.這是因為傳統的優化方法通常是采用單點進行迭代,單次優化通常是對所有的目標函數進行加權后再統一進行求解.從圖2 可以看出,無論怎樣去設置加權向量(V1和V2),傳統的優化方法只能求解到整個Pareto 前沿中的兩個端點,A點或B點.Pareto 前沿上的解,傳統通過加權的優化方法無法求得.而采用多目標進化計算的方法,通過一組種群進行同時迭代搜索,可以同時找到整個Pareto 前沿上的所有解.此外,與傳統的優化算法相比,多目標進化算法只需要運行一輪就可以找到所有的最優解集,而傳統的優化方法需要運行多次,且不一定能完全搜索到整個Pareto 解集.因此,相比傳統的優化算法,進化算法,特別是多目標進化算法具有顯著的優勢,特別是在求解非凸形狀Pareto 前沿的多目標優化問題時.
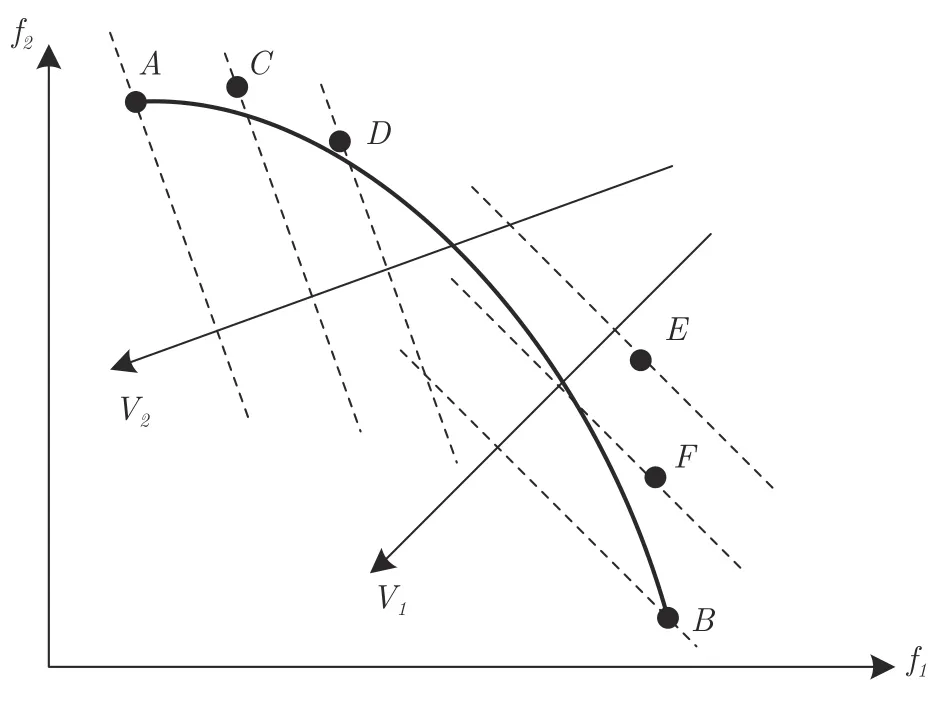
圖2 具有非凸Pareto 前沿的優化問題的示意圖Fig.2 A non-convex Pareto front of a multi-objective optimization problem
近年來,進化算法(Evolutionary algorithms,EAs)由于具有潛在的并行性(通過種群來搜索)、良好的全局搜索能力以及不需要梯度信息就能很好地求得一組近似最優解等優點,已成為研究熱點.目前進化算法已經應用于大規模優化[11]、車間調度[12?13]、電力系統調度[14?15]、電子系統設計[16?17]、微機電系統設計[18?19]、機電系統設計[20?21]及其性能評價和故障分析[22?23]等領域,成功解決了從分子遺傳學到天文學等領域的優化問題.然而現有文獻暫無對近年來進化計算在復雜機電系統設計自動化方面的綜合討論.因此,本文試圖彌補這一空缺,對進化計算在復雜機電系統設計自動化方面的應用進行了系統的綜述,為對此領域感興趣的研究人員提供一個更為清晰的思路.
本文內容安排如下:第1 節對機電系統設計自動化中常用的進化計算方法進行簡要描述;第2 節綜述進化算法在復雜機電系統設計自動化中的應用進展;第3 節對一類典型的復雜機電系統—機器人系統的設計自動化進行更加深入的討論與展望;第4 節討論進化計算應用于復雜機電系統設計自動化時存在的問題,并對未來進化算法的發展方向進行展望;第5 節對全文進行總結.
1 進化計算
進化計算是一系列受生物進化啟發的全局優化算法,它是計算智能的一個重要分支,同時也是人工智能的子領域之一.從技術層面而言,進化計算是一類具有啟發式或隨機優化特點的采用種群進行問題試錯的求解器.它受生物進化過程中“優勝劣汰”的自然選擇機制和遺傳規律的影響,通過程序模擬這一過程,把要解決的問題看作環境,通過對種群進行自然演化來尋求最優解[24].
進化計算一般包括種群初始化、種群適應度評價、遺傳算子(選擇、交叉和變異)等基本操作,其基本的計算流程框架如圖3 所示.與傳統基于梯度的優化算法相比,進化計算是一種具有廣泛適用性的全局優化方法.它具有自組織、自適應、自學習的特性,能夠不受問題性質的限制(如連續、可導、凸性),有效地求解傳統的基于梯度優化算法難以解決的復雜問題[25].
圖3 進化計算的基本流程框架Fig.3 Basic flow framework of evolutionary computation
機電系統設計自動化中常用的進化計算方法主要包含以下幾種:1)遺傳算法[26](Genetic algorithm,GA);2)基因編程[27?28](Genetic programming,GP);3)進化策略[29](Evolution strategies,ES);4)粒子群算法[30](Particle swarm optimization,PSO);5)差分進化算法[31](Differential evolution,DE);6)蟻群算法[32](Ant colony optimization,ACO).下面分別對上述6 種算法進行簡要介紹.
遺傳算法是一種基于種群的隨機搜索算法.它采用定長的線性字符串對種群中的個體進行編碼(主要包括二進制編碼、序列編碼和浮點型編碼),通過選擇、交叉、變異對種群進行不斷進化,最終求得優化問題的最優解或滿意解[26].
基因編程是由遺傳算法發展延伸而來的,它與遺傳算法最大的不同是以“樹”型結構對種群中的個體進行編碼,而且樹的結構和大小都是動態自適應調整的[28].此外,在應用GP 解決具體問題時,需要根據問題特性定義終止符集和運算符集.基因編程能同時對系統的拓撲結構和參數進行優化.
進化策略是于1963 年由德國學者Schwefel 等在研究流體動力學中的優化問題時,共同開發的一種適合于實數變量的、模擬生物進化的優化算法[29].它與遺傳算法不同之處在于子代的產生過程.在ES 中,種群中的每個個體通過高斯變異來產生一個新的子代.此外,在進化策略中,個體的選擇是按照完全確定的方式進行,而在遺傳算法中,個體的選擇具有一定的隨機性(如輪盤賭選擇).
粒子群算法是一種受到鳥類覓食行為啟發而提出的一種基于群體智能的隨機搜索算法.該算法把問題的搜索空間類比為鳥類的飛行空間,將每只鳥表征為優化問題的一個候選解,將鳥群尋找食物的過程類比為優化問題最優解的搜索過程[30].它與遺傳算法最大的區別在于新解的產生機制不同.在粒子群算法中,通過每個粒子(鳥)在空間中的位置移動來產生新解.每個粒子的位置更新是在原來位置的基礎上在加上粒子的飛行速度.而粒子飛行的速度需要同時考慮自身的歷史最優位置和群體內其他粒子的歷史最優位置.
差分進化算法是由美國學者Storn 等于1995年提出的一種基于種群的全局搜索算法.它的基本思想是利用從種群中隨機成對選擇的個體向量的差分對選定的基準向量施加擾動來產生新的向量(變異個體),變異個體再與當前個體進行雜交產生試驗向量,試驗向量與當前個體向量競爭,適應值較優的向量被保留到下一代[31].與其他進化算法相比,DE 算法結構簡單,控制參數較少,易于實現.
蟻群算法是一種由某些螞蟻在經過的路徑上釋放信息素和對信息素的跟蹤行為啟發得到的元啟發式算法[32].它的基本思路為:用螞蟻的行走路徑表示待優化問題的可行解,整個螞蟻群體的所有路徑構成待優化問題的解空間.路徑較短的螞蟻釋放的信息素量較多,隨著時間的推進,較短的路徑上累積的信息素濃度逐漸增高,選擇該路徑的螞蟻個數也愈來愈多.最終,整個螞蟻會在正反饋的作用下集中到最佳的路徑上,此時的最佳路徑便是待優化問題的最優解.
2 進化計算在復雜機電系統設計中的應用
通過大量的文獻調研發現:在國內外將進化算法用于復雜機電系統設計自動化方面的研究報導相對較少,而將進化算法用于電子系統設計自動化方面的研究卻受到了大量學者的廣泛關注.盡管電子系統的設計自動化專注于單一物理域,但也可以認為電子系統是機電系統的一個特殊分支,特別是其中對于模擬電路的設計自動化研究的許多方法可以被借鑒于復雜機電系統的設計自動化研究中.
圖4 給出了廣義機電系統(包括電子系統、微機電系統、狹義機電系統和純機械系統)中各系統在耦合度和模塊化兩個方面的不同特點,以及各系統設計自動化之間的關系.
圖4 中,EDA、mDA、MDA 和M*DA 分別表示電子系統、微機電系統、狹義機電系統和純機械系統的設計自動化.廣義機電系統中各組成系統在模塊化和耦合度上表現各異,其中電子系統具有高度模塊化、低耦合度的特點,易于進行設計自動化,而且已經在工業界和學術界取得了巨大的成功;而純機械系統模塊化最低,耦合性最強,相比于其他系統的設計自動化則要困難得多.
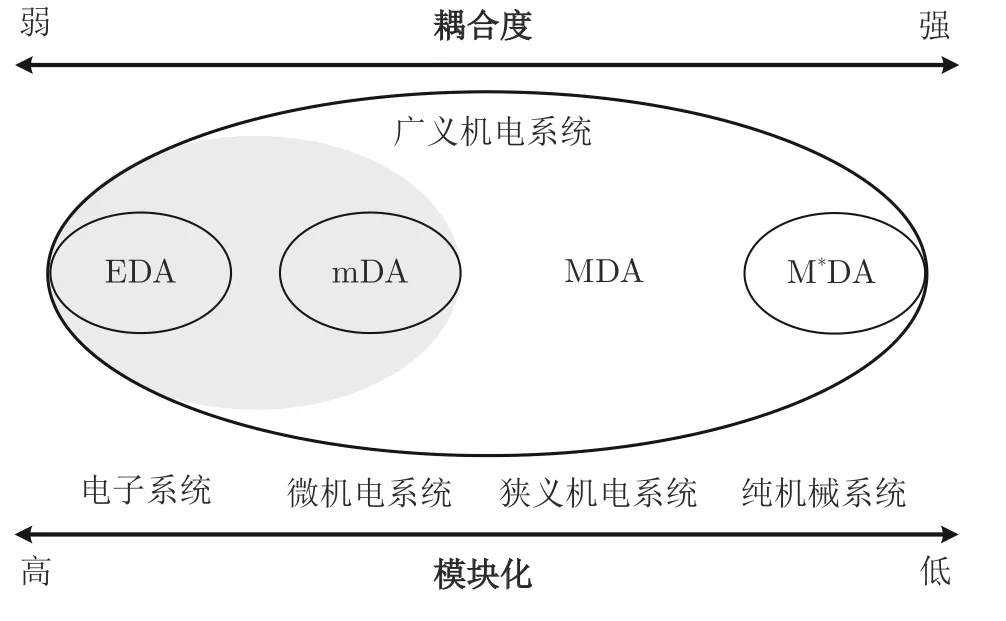
圖4 不同系統的設計自動化之間的關系Fig.4 The relationships of design automation of different systems
2.1 電子系統設計自動化
電子系統主要包括模擬電子系統和數字電子系統,由于數字電子系統易于模塊化,因此非常適合進行自動化設計.而相比于數字電子系統的設計自動化,模擬電子系統的設計自動化要困難得多,主要是因為以下兩個原因:
1)模擬電子系統中各模塊間具有更強的耦合性;
2)模擬電子系統的性能評估要比數字電子系統的性能評估更為復雜.
電子系統的設計自動化在工業界和學術界取得了巨大的成功,并在工業界產生了一個名為電子設計自動化(Electronic design automation,EDA)的產業[33].其中在工業界具有代表性的企業,如全球知名的三大EDA 軟件巨頭:Cadence、Mentor Graphics 和Synopsys 公司在EDA 領域做出了很多突破性研究,并成功地把他們的研究成果應用到各類電子產品中.Cadence 公司的產品涵蓋了電子設計的整個流程,包括系統級設計,IC 綜合及布局布線,模擬、混合信號及射頻IC 設計等.Mentor Graphics 公司主要提供EDA 軟件和硬件的設計解決方案.Synopsys 公司致力于復雜的芯片上系統(SoCs)的開發,其擁有全球電子市場先進的IC 設計與驗證平臺.
在學術界,進化算法在電子系統設計自動化方面得到了廣泛應用[34?39].如Zhang 等[40]應用遺傳算法對電力電子系統進行了設計,他們采用自適應搜索機制來協調控制器的設計空間搜索和被控對象的設計空間搜索.但是這種方法只能對具有固定拓撲結構的電氣系統進行參數優化.Castejón 等[41]提出了一種基于語法式進化的模擬電路自動合成方法,該方法采用巴科斯范式(BNF)語法對染色體進行解碼獲得模擬電路的網絡列表,并利用遺傳算法對解空間進行搜索,最后自動設計出7 種基準電路的最優電路的拓撲結構和規模.Rojec 等[42]提出了一種全局參數優化方法來對模擬電路進行優化設計,該方法既可以進行結構拓撲搜索又可以對給定的電路進行參數優化.Koza 等[16]采用基因編程對模擬電路進行自動設計,可以同時進行結構拓撲搜索和參數優化,成功地設計出了8 種不同拓撲結構類型的模擬電路,但這種方法沒有考慮同時對控制器和被控對象進行并行設計.Dupuis 等[43]提出了一種名為HBGGP 的混合動力學系統的設計自動化方法,采用混合鍵合圖來描述帶有離散和連續事件的混合動態系統,并結合基因編程來搜索系統的開放式設計空間,自動生成滿足預定義設計規范且拓撲結構和參數同時優化的混合動力學系統.最后通過DC-DC 變換器電路的自動設計驗證了該方法的可行性和有效性.
除上述工作外,其他具有代表性的工作還包括:解光軍等[44]用遺傳算法對運算放大器進行了自動設計.朱繼祥等[45]提出了一種并行遞歸分解算法,該算法將目標電路的進化設計過程轉化為其多個子電路的并行進化過程.最后,通過實驗表明了該分解策略能有效提高演化邏輯電路的設計效率和成功率.Mallick 等[46]提出了一種基于混合種群的引力搜索算法和粒子群算法相結合的優化設計方法,用于對CMOS 的差分放大電路和二級運算放大電路進行設計優化.該方法利用混合種群中粒子間的萬有引力加速了收斂過程,可以快速得到性能參數最優、MOS 面積最小的放大電路.Zheng等[47]提出一種兩步子種群策略,即根據評價指標對當前種群中的個體進行排序,并將其分為優勢子種群和劣勢子種群,子種群進化生成后代,如果生成的后代比優勢子種群中個體具有更好的評價值,則它們取代優勢子種群中的個體,并作為突變策略的載體.該策略與差分進化算法相結合用于解決單目標和多目標優化問題.最后,通過微波電路設計驗證了該策略的有效性.受到Koza 等[16]所提出的基因編程的啟發,Mattiussi 等[48]提出了一種稱為模擬基因編碼的基因表達方法,主要用于電路和網絡(如模擬電子電路、神經網絡和基因調控網絡)的進化設計和逆向工程.
綜上可知,EDA 在工業界和學術界均取得了廣泛的成就,這些成就對復雜機電系統設計自動化研究具有重要的借鑒意義.
2.2 微機電系統設計自動化
微機電系統(Micro-electro-mechanical systems,MEMS)作為一種特殊類型的機電系統,是由微電子器件與微機械部件兩者緊密結合而成的微系統.
目前,進化算法在MEMS 設計自動化方面也已經取得了很大的進步[49?53].如在綠色化MEMS 設計自動化方面,Nabavi 等[54]提出了一種基于MEMS 的壓電能量采集器的自動化設計與優化方法,采用遺傳算法對壓電能量采集器的物理參數進行優化,得到輸出功率較大的壓電能量采集器.最后,對優化后的壓電能量采集器進行有限元分析和原型測試,表明遺傳算法在增大壓電能量采集器的電壓幅值和減少計算時間方面具有較高的優化效率.此后,他們還提出了一種基于GA 的設計自動化技術[55],利用GA 對能量采集器的物理尺寸進行優化設計,從而來調整采集頻率和提升能量采集效率,并通過自制原型機證明了GA 的有效性.針對傳統MEMS 能量采集器工作帶寬窄、頻率高的情況,他們采用GA 來優化能量采集器的幾何形狀,并結合多模態和非線性兩種機制得到了具有多自由度振動能力的壓電能量采集器[56].最后,經實物分析與測試表明通過GA 優化得到的壓電能量采集器可以大大提高能量采集效率.此外,Wen 等[57]利用多目標遺傳算法對一種MEMS 壓電能量采集器中基于集成的多級力放大裝置的主要結構參數進行優化.針對受制造工藝引起的幾何不確定性限制的MEMS 的設計,Fan 等[18]提出了一種基于改進差分進化算法的MEMS 自動魯棒設計方法,并通過對一梳狀驅動微諧振器的布局設計,驗證了該方法在魯棒設計問題上的有效性.
一般而言,復雜的MEMS 由成千上萬的微機電元件組成,其設計過程往往也比較復雜,對其進行優化也較為困難,而目前有不少學者采用分層設計的思想結合進化算法對MEMS 進行設計優化.相關工作有:Fedder 等[58]借用來自超大規模集成電路和模擬電路設計中的分層設計概念,提出了一種用于MEMS 的分層級設計方法.Mukherjee 等[59]利用該分層級設計方法對梳狀驅動微諧振器的布局設計進行了研究,對梳狀驅動微諧振器功能構件的幾何參數進行了自動設計和優化.但是他們的方法不能同時優化MEMS 的拓撲結構和參數.Fan 等[60]提出了一種MEMS 的分層級設計自動化方法,首先利用基因編程的拓撲搜索能力和鍵合圖的統一建模能力來自動優化MEMS 系統級的行為模型,然后運用帶約束的遺傳算法來自動優化元器件的幾何尺寸參數.利用這種MEMS 的分層級設計自動化方法,設計出了一種由多個微諧振器耦合而成的濾波器.
MEMS 的設計涉及多個學科領域,且常含有一些相互沖突的目標,因此在實際工程設計過程中,可以把MEMS 的設計優化問題描述為一類多目標優化問題,并采用對應的多目標進化算法進行求解.如在文獻[57]中,利用多目標遺傳算法進化出一種基于集成的力放大裝置的MEMS 壓電能量采集器.Farnsworth 等[61]提出了一種基于等效電路法的MEMS帶通濾波器建模與優化方法,采用兩種多目標進化算法NSGA-II 和SPEA2 分別對MEMS 帶通濾波器進行多層級設計優化.還提出了一種多級評估策略來擴展搜索過程,降低計算成本.最后,通過對三種不同頻率的MEMS 帶通濾波器的優化設計驗證了NSGA-II 和SPEA2 的有效性.Di 等[62]將生物地理學算法運用到多目標問題中,提出一種基于生物地理學的多目標進化算法,利用生境的非支配排序,在目標空間中近似求得帕累托最優解.通過對一種靜電微電機的形狀進行設計驗證了該方法的有效性.大多數現有MEMS 設計優化方法能處理設計變量的數量較少,且依賴于耗時長的數值模擬或依賴于特別的分析模型.針對此類挑戰,Liu等[63]提出一種在線自適應代理模型輔助優化框架,將差分進化算法融入到該框架下開發出一種自適應高斯過程輔助差分進化算法,并在線建立高斯過程代理模型對昂貴的數值模擬結果進行預測.通過對兩個MEMS 驅動器的設計優化,表明該算法比其他方法在效率、優化能力方面更具優勢.此外,針對MEMS 驅動器在設計優化過程中,其建模和仿真消耗計算成本高、耗時長、效率低等問題,Liu 等[64]將伴隨靈敏度法和高斯過程相結合提出了一種基于替代模型輔助的混合優化方法對一種硅材料微驅動器的結構進行優化設計.在設計過程中,將伴隨靈敏度法得到的計算成本低廉的偏導數用來解決替代模型優化中計算成本高昂的采樣問題,從而提升設計效率.
除上述研究工作外,還有一類比較有代表性的研究是同時對MEMS 的結構和參數進行設計優化.如Kamalian[65]提出了一種能集成人類設計知識并對候選設計進行主觀評價的交互式進化算法,該算法也可以對MEMS 的拓撲結構和參數進行并行優化.Zhang[66]對文獻[65]的工作進行了進一步研究并提出了一種交互式混合進化算法,該算法集成了一種多目標遺傳算法和一種基于梯度的局部優化方法,可以更為靈活地幫助設計者積極地找到有潛力的設計拓撲結構,然后再優化它們的參數.關于進化計算在MEMS 設計優化中的最新進展工作可以參見文獻[67].
2.3 復雜機電系統設計自動化
機電系統在本質上是集成有控制系統的多物理域系統[68].機電系統是現代化產品演化的一個必經階段,包含許多來自不同工程領域的組件,如機械、電氣、液壓和控制系統.在機電系統中,控制器作為控制中樞(大腦),其性能的好壞直接影響機電系統的優劣.本節分別從機電系統本體設計、控制器設計、控制器與被控對象并行設計三個方面展開討論.
2.3.1 機電系統本體設計
在機電產品的形成過程中,本體結構的概念設計是產品詳細設計及產品開發之前一個非常重要的階段,其生成滿足設計問題功能需求的解決方案.
在機電系統本體概念設計方面的研究有:Chakrabarti 等[69]提出了一個對于機械系統的概念設計進行自動綜合的方法框架.該方法框架能夠自動給出一系列可能滿足系統功能設計要求的概念設計,但沒有對所設計系統的動力學特性進行分析.Campbell[70]開發了一種基于Agent 的機電系統自動概念設計框架,該方法框架能夠適應動態變化的設計環境,其缺點也是缺乏對所設計系統的動力學特性進行全面分析的能力.
鍵合圖(Bond graph,BG)是一種能夠統一描述各個物理子系統和控制器的建模語言,能夠對所設計的機電系統的動力性特性進行全面綜合的分析,能夠有效解決涉及多能域耦合的復雜系統的動態分析與建模問題[71],可以有效解決上述機電系統概念設計自動化方面的不足.它已被廣泛應用于各種各樣的現實物理動態系統的建模與分析[72],如機器人[73?74]、電動汽車[75]、飛行器[76]和風力發電系統[77]等.圖5 給出了一個鍵合圖模型的示例,該模型能統一地代表在三個不同應用領域(包括機械、電子、微機電系統)的諧振器單元.
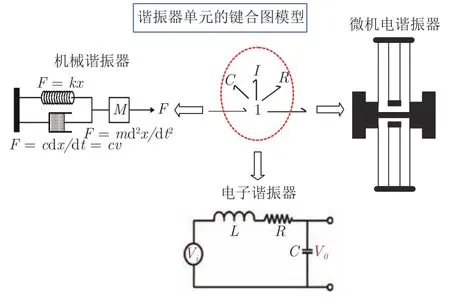
圖5 不同應用領域的諧振器鍵合圖表示Fig.5 One bond graph represents resonators in different application domains
由于鍵合圖能夠表示系統的拓撲結構,從而使得鍵合圖在開放式搜索設計中成為一個非常好的候選工具.Tay 等[78]結合鍵合圖和遺傳算法自動生成了滿足預先定義好設計規范的減震系統和空氣壓縮機等兩類機電系統.Seo 等[79]提出一種結合鍵合圖和基因編程(Bond graph and genetic programming,BG/GP)的機電系統自動設計方法.相較于其他設計方法,BG/GP 方法在拓撲結構的搜索方面具有明顯的優勢.不同設計方法的特性如表1所示.

表1 不同設計方法的對比[80]Table 1 Comparison of various design approaches[80]
由表1 可知,BG 方法具有為多能域系統進行建模和有效評估的特性;GP 方法與GA 方法均能對設計對象進行自動綜合,且能進行進化設計得到最優的設計方案.但GP 方法更有優勢,它極強的拓撲搜索能力,使它更能得到具有不同拓撲結構的設計.BG/GA 集成了BG 和GA 方法的特性,而BG/GP 集成了BG 和GP 方法的特性.與BG/GA相比,BG/GP 具有更強的開放式拓撲搜索能力.
在BG/GP 方法中,BG 被用于多能域系統的建模,而GP 被用于對開放式設計空間的自動搜索.圖6 通過電子領域的一個電路設計優化實例示出了BG/GP 方法中基因型到表現型的映射過程,其中,鍵合圖作為以胚胎為起點的基因編程樹到最終的物理實現的中間媒介,起到了基因型到表現型的映射作用.在BG/GP 方法中,通常以胚胎為起點,通過各種鍵操作(如Insert_J0、Insert_J1)和節點操作(如add_I、add_C、add_R)對胚胎進行拓撲生長得到如圖6(d)所示的GP 樹.然后轉化為如圖6(e)所示的BG 模型,其中兩┊間為胚胎的可生長區域(拓撲結構生長點),該拓撲結構由不同的節點(0-節點和1-節點)和含不同參數的鍵合圖元件(I元件和C 元件,其他情況下還包含R 元件)通過連接鍵組合而成.圖6(a)、6(b)和6(f)給出了以電路胚胎為起點進化出來的基因型通過對應的鍵合圖模型再轉換成為最終電路圖(表現型)的過程,從該過程中反映出BG/GP 方法不僅能自動進行開放式的拓撲結構搜索,還能同時進行參數優化.

圖6 基因型-表現型的映射實例Fig.6 An instance of genotype-phenotype mapping
Fan 所提出的BG/GP 方法已被用于電子電路和微機電系統的設計[81],在機電系統設計方面也取得了成功.機電系統設計不同于傳統的電子電路、機械系統和流體動力系統的設計,且難于各單一領域系統的設計.為了實現機電系統的自動綜合設計,Seo 等[79]利用BG/GP 方法對打字機驅動子系統重設計問題進行了設計優化,結合控制領域特征值配置問題和電子電路領域模擬濾波器的設計展示了基于BG 和GP 的設計方法在自動化、多領域以及開放式拓撲結構設計方面的潛在優勢.在此基礎上,Fan 等[82]以打字機驅動機構的重設計為例,以鍵合圖表示的簡單胚胎為起點,采用GP 的一種分等級公平競爭模型來增加拓撲結構設計的多樣性,最后獲得幾種新穎的驅動機構的候選設計方案,說明了該BG/GP 方法的有效性和高效性.
此外,Wang 等[20]對BG/GP 方法進行了進一步研究,將BG/GP 方法與人類知識相結合,提出一種基于知識交互的機電系統進化設計框架,如圖7所示.圖7 中左側部分為BG/GP 方法的基本流程,即在預定義機電系統相關設計指標條件下,人類設計者首先利用鍵合圖方法對機電系統進行建模,然后結合基因編程方法通過子代生成、適應度評價、重組、引導等迭代操作得到最優的候選設計方案,最終制造出滿足預定義設計指標的最優設計方案.但與一般的BG/GP 方法相比,該框架中進化設計過程與人類知識庫具有良好的交互性,主要體現在兩個方面:1)通過知識提取從進化過程得到的成功的候選概念設計方案中獲取鍵合圖模塊,在知識庫中組成一套基本的構建模塊庫,再融入到進化設計過程中可以提取有用的模塊化設計知識,增強設計的可重用性,并減少GP 的搜索空間,快速找到成功的候選設計方案.2)可以將從人類經驗中或從進化設計過程中提取并經過迭代驗證、重組后獲得的設計知識融入到進化過程中,以提高基因編程的開放式拓撲搜索能力,得到性能最優的設計方案.通過車輛懸掛控制系統和微機電系統帶通濾波器的進化設計,驗證了該基于知識交互的集成設計方法的有效性.

圖7 機電系統的進化設計框架Fig.7 The framework of evolutionary synthesis of mechatronic systems
2.3.2 機電系統控制器設計
近些年,出現了一些使用進化算法對控制器進行優化的設計方法[83?88].其中,包含了GA、DE、PSO等常用進化算法及一些混合進化優化算法.
如Yousfi 等[89]使用GA 對電機矢量PI 控制參數進行設計.Li 等[90]提出了一種結合增強遺傳算法(Enhanced GA,EGA)和模擬退火算法(SA)的新型混合算法(Hybrid GA,HGA),模擬退火過程應用于EGA 操作后的較好的半種群,引入自適應冷卻時間表,并且采用正交設計方法、自適應交叉和變異概率機制來加強收斂,維持種群多樣性.對于插電式混合動力總線的動力總成和參數設計,HGA的收斂速度和全局搜索能力更好.Moharam 等[91]將DE 算法和PSO 算法相結合提出了一種用于優化PID 控制器參數的混合元啟發式算法(ALC-PSODE 算法),該PSO 算法具有眾多挑戰者和一個老化的領導者.該ALC-PSODE 算法結合了兩種算法的優點,在12 個基準函數測試實驗中獲得了比其他單一進化算法更優的解,此外對三罐液位系統PID 控制器的參數進行整定優化,表明該算法在保持快速收斂的同時,具有較強的魯棒性和較高的效率.
徐國政等[92]針對機器人輔助患肢進行康復訓練時患肢病情的變化對系統穩定性造成的影響,提出了一種基于進化模糊神經網絡的自適應阻抗控制方法,對阻抗控制器的參數進行優化.王福斌等[93]采用小生境粒子群算法對自抗擾控制器參數進行整定優化,設計出適合挖掘機器人的基于圖像的自抗擾視覺伺服控制器,從而提高挖掘機器人的自主挖掘能力.Zhang 等[94]將混沌原理與循環交換鄰域機制相結合,提出了一種改進的人工蜂群算法,用于設計優化自動電壓調節系統的分數階PID 控制器.利用混沌的遍歷性,防止搜索陷入局部最優;利用循環交換鄰域機制來擴大求解范圍,加快找到控制器參數的最優解.陳啟鵬等[95]針對純電動汽車穩定性和制動能量回收問題,對車輛制動能量回收系統以及車身穩定性能做了研究,采用帶精英策略的非支配排序遺傳算法對車身穩定控制器的參數進行了優化設計.Zheng 等[96]基于差分進化算法提出了一種永磁同步電機分數階PI 速度控制器的參數整定優化方法,進一步的Zheng 等[97]基于時域和頻域要求規范的考慮,利用差分進化算法對控制器參數進行整定優化,獲得的PIλDμ控制器具有較好的魯棒性和最優動態響應性能.
上述方法均是在控制器結構固定的前提下,基于進化算法對控制器的參數進行優化設計,這對控制器的性能有較大限制.為提升控制器的性能,國內外學者在對控制器參數和結構進行同步優化方面也進行了相應的研究.如Koza 等[98?101]提出一種基因編程的方法在控制器的設計自動化方面做了大量的研究和嘗試.一種基于基因編程的自動設計方法[98],用基因編程的程序樹來表示控制器的拓撲結構和參數.通過基因編程自行決定組成控制器的信號處理模塊,模塊類型,模塊間的連接方式以及模塊的控制參數.Bruijnen 等[102]在Koza 等的研究基礎上,進一步提出了結合遺傳算法和基因編程的混合優化算法,其中遺傳算法用于優化控制器的參數,基因編程用于優化控制器的結構.Lapa 等[103]結合GA和擴展的PSO(ePSO)算法提出了一種柔性模糊PID 控制器的構造方法,其中GA 用于選擇控制器的結構,同時ePSO 算法用于選擇控制器的結構參數.仿真結果表明,該控制器結構設計過程可以實現自動化.此外,在對控制器結構和參數進行同步優化方面,Lapa 等[104]還提出了一種基于多種群的優化方法,用不同的進化算法來同步處理子種群,對控制器的參數和結構進行同步優化.最后通過對1/4 車輛主動懸架控制器的設計說明了該方法的有效性.
在國內,北京理工大學辛斌等在對控制器參數和結構進行同步優化方面開展了一系列研究.2015 年,孫振路等[105]提出了一種基于“庫”和進化算法的最大結構控制器設計方法,并提出了一種結構和參數雙層優化的設計策略,控制器的結構可針對控制系統優化調節,具有靈活多變的特點.控制器結構和參數分別通過參數自適應遺傳算法和自適應差分進化算法進行優化,控制器自動設計水平較高,且計算代價較文獻[98]有了明顯降低.通過對多個控制系統的控制仿真,驗證了該方法的有效性和先進性.2017 年,展嬌楊等[106]提出了一種改進差分進化算法對控制器結構和參數進行同時優化設計,突破了控制器結構對性能的限制,提升了設計的自動化水平.通過對磁懸浮球控制系統的仿真和實驗,說明了該控制器針對不同擾動皆具優良的抗擾性能,驗證了該方法的可行性和優越性.2019 年,展嬌楊[107]提出了如圖8 所示的一種通用的結構可優化抗擾控制器的設計框架,可針對不同被控對象,結合進化算法的搜索進化能力自動確定控制器的結構形式和參數.文中研究了控制器結構組成及控制器的表達方式,設計出一套控制器結構生成規則,通過一種高效的編解碼策略,以壓縮冗余的解空間,提高算法的搜索效率.在該框架下,對具有參數不確定性的球桿系統、單級倒立擺以及受到外部擾動的磁懸浮小球系統這幾種具有不同特性的典型非線性系統,進行專門的結構可優化抗擾控制器設計,通過仿真及實驗,驗證了結構可優化抗擾控制器智能優化算法的可行性、先進性和通用性.
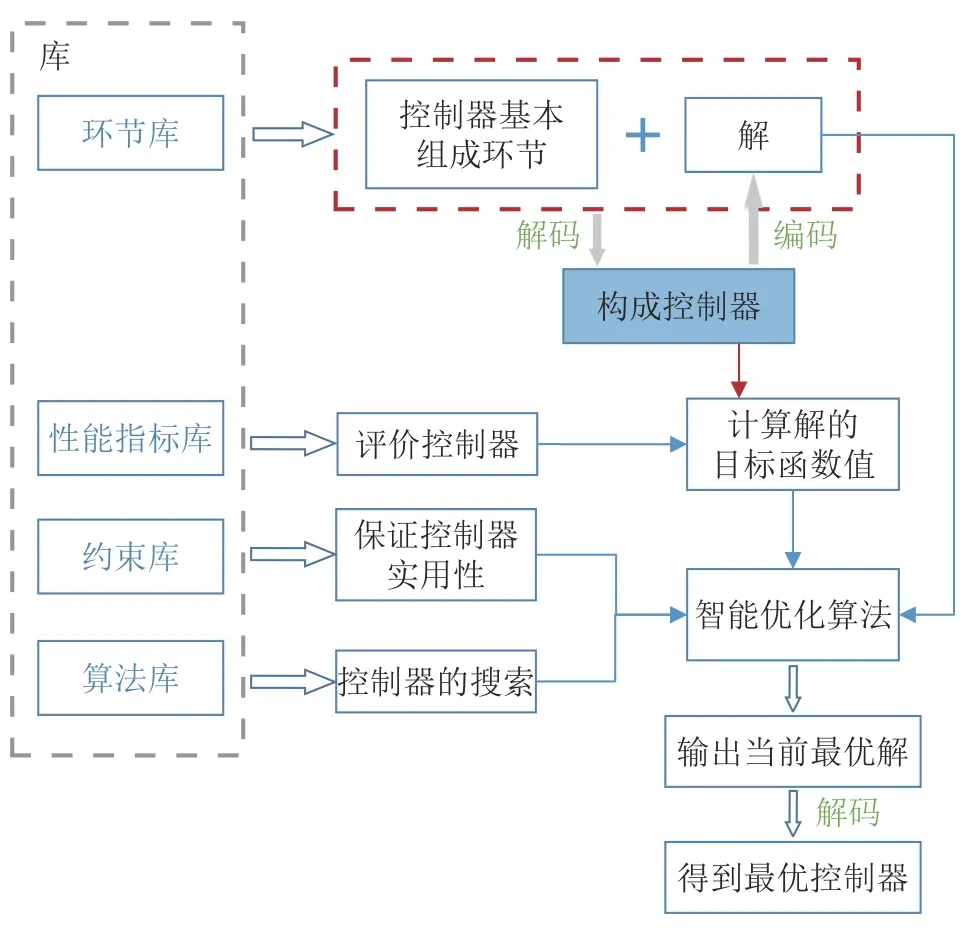
圖8 結構可優化抗擾控制器的設計框架[107]Fig.8 The framework of disturbance rejection controllers with optimized structures[107]
眾所周知,控制系統在我們的生產、生活中無處不在,基于人工智能的技術也逐漸成為控制器優化領域的熱點.從上可知,進化計算作為一種人工智能技術為機電系統控制方面的優化設計提供了新的思路,關于進化算法在過程控制、電氣工程、機電系統控制方面的最新研究工作可參見文獻[108].
2.3.3 機電系統控制器和被控對象并行設計
機電系統由多個不同工程學科的子系統組成,由于不同工程學科的子系統設計往往需要采用所屬學科的設計語言,難以形成一種對涉及多工程領域的系統進行集成設計的統一化方法,且采用傳統設計方法難以保證機電系統的整體性能是最優的.機電系統是一種受控的復雜工程系統,在以往的研究中,關于如何對機電系統控制器和被控對象進行并行設計優化的報導并不多.但近年來,計算綜合領域的研究取得了巨大成功,尤其是對進化算法的研究,推動了機電系統并行設計方面的發展.受到自然界共生現象的啟發,Potter 等[109]提出了一種協同進化的一般性架構,用于進化設計系統中相互作用且互相適應的子組件,并利用該協同進化方法設計出了一種仿真自主機器人的基于規則的控制系統.針對協同進化過程中如何選擇協作者用于評估,Wiegand 等[110]提供了協同進化方法中各種協作機制的實驗驗證分析,并提出了一些關于如何選擇適用于特定問題的機制的基本建議.
針對單一領域的設計優化方法無法解決由多領域子系統組成的機電系統的設計優化問題,Wang等[111]提出了統一的機電系統建模和基于腦?肢協同的進化綜合方法,利用鍵合圖對車輛懸掛系統的連續控制器和被控對象進行描述,采用腦?肢協同進化算法自動設計出了車輛懸掛系統.與傳統方法相比,該種方法集成了鍵合圖的多領域統一建模特性和基因編程的開放式拓撲搜索能力,能夠幫助設計者獲得更為廣泛且全面的優化設計方案,并可以靈活地確定一個最終的設計.
由于鍵合圖只能表達連續的控制器,對含有離散控制器的系統,需要用其他方式來表示離散控制器,如:有限狀態機、前向控制器(一種模型預測控制器)[112?114]等.針對含有離散和連續系統的混合動力學系統的設計優化問題,Dupuis 等[43]提出了一種名為HBGGP 的設計自動化方法.文中采用混合鍵合圖來描述帶有離散和連續事件的混合動力學系統,采用一種單步前向控制器來控制DC-DC 變換器,并結合基因編程來搜索系統的開放式設計空間,自動生成滿足預定義設計規范且拓撲結構和參數同時優化的DC-DC 變換器電路.此后,他們還提出了一種混合機電系統中離散控制器的進化設計方法[115],用有限狀態機表示離散邏輯控制器,混合鍵合圖表示混合被控對象,結合遺傳算法對混合機電系統的控制器和被控對象進行協同進化設計.通過對一雙罐系統的離散控制器,在被控對象結構固定和可變情況下,利用有限狀態機控制器和一種單步前向控制器表示的離散控制器進行設計比較,闡述了兩種控制器的優劣,驗證了該進化設計方法的有效性.上述應用案例說明了基于BG/GP的自動設計方法可以為傳統的機電系統的創新設計提供新的思路,并具有改進現有設計方案的潛力.
我們將上述機電系統設計自動化中的一些代表性設計方法總結在表2 中.其中,由于GP 方法具有同時進行開放式拓撲結構搜索和參數優化的能力得到了學者們的廣泛關注.此外,多目標進化算法也被越來越多地用于求解實際機電系統優化設計問題.
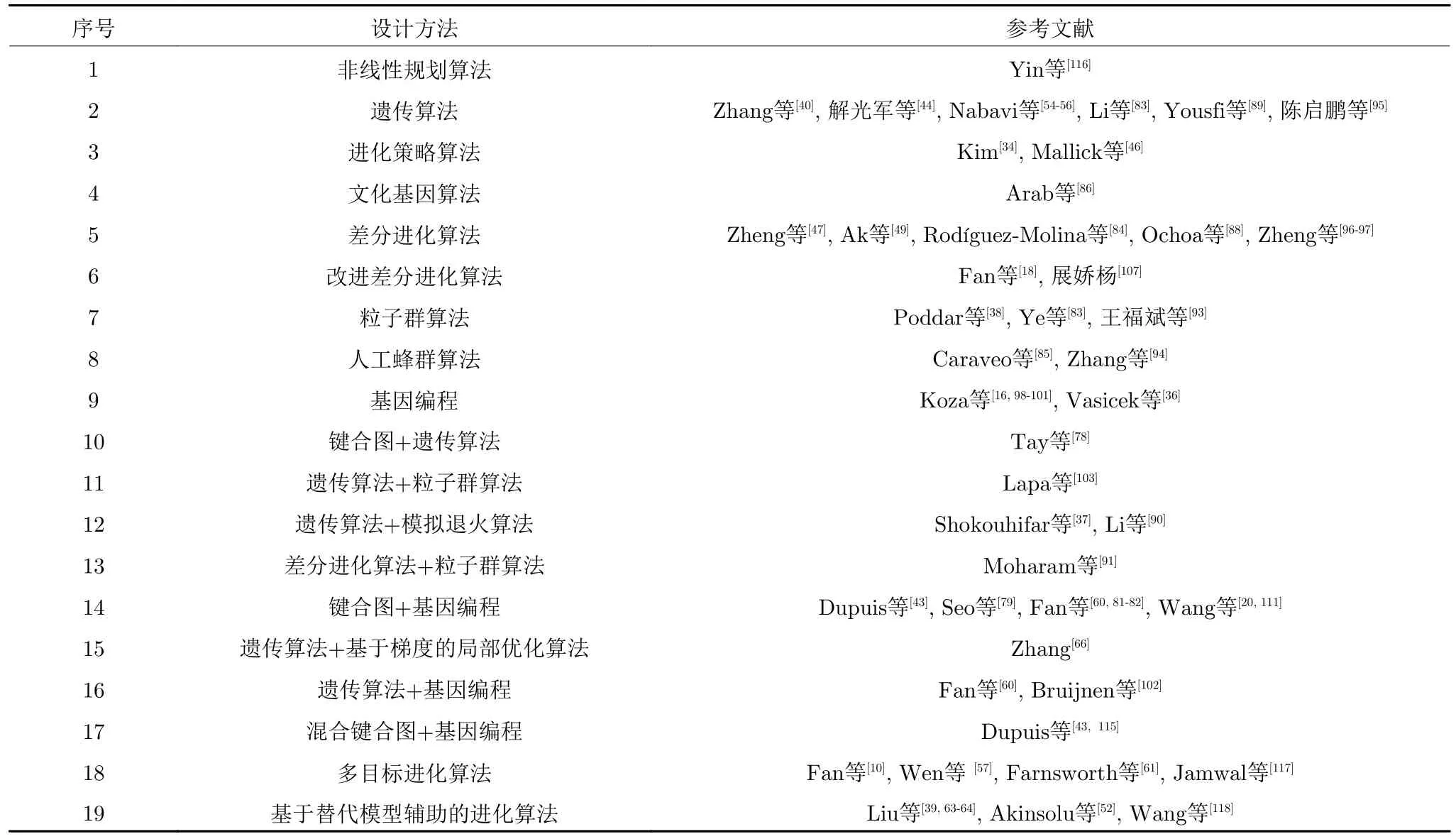
表2 機電系統設計自動化中設計方法的總結Table 2 A survey of design methods for MDA
3 機器人系統設計自動化
機器人系統作為集機械、電力電子、軟件和控制于一體的復雜機電系統的典型代表,通過手工設計一個具有自主能力和自適應的機器人系統是及其困難的,而進化計算方法為機器人系統的自動化設計提供了巨大可能,且在該方面的研究得到了工業界和學術界的高度關注.如著名機器人公司ABB,該公司研發團隊和瑞典著名的林雪平大學Peter Krus 教授小組建立了長期的合作關系,在機器人系統自動化設計優化方面開展了深入的研究.Tarkian[119]明確定義了“設計自動化”的概念,并采用經典的多目標進化算法對機器人的設計進行優化.
2000 年,Lipson 等[120]利用進化計算的方法設計出了第一個用計算機生成的機器人系統,并用3D 打印技術進行了物理實現,該工作發表在Nature期刊上.后續Lipson 教授團隊在軟體機器人和模塊化自重構機器人的研究上取得了一系列成就.如在文獻[121]中提出了一種軟體機器人的設計自動化方法,結合進化算法和高斯混合模型表示法對軟體機器人進行開放式拓撲結構搜索,得到了滿足高級功能要求的、材料可自由分配且構型多樣的軟體機器人.
在機器人本體結構設計方面,學者們利用進化計算方法取得了一系列成果,在機械臂[122?124]、機械手爪[125?126]、傳動裝置[127?128]等的設計優化問題上展現了進化計算的巨大優勢.West 等[129]針對一種七自由度機械臂的動態建模和參數評估問題,利用遺傳算法開發出一種機制,使得在噪聲和未知運行情況下可以對機械臂模型參數進行估計和更新.為獲得高性能的機械臂,Xiao 等[122]從機器人運動學和動力學出發,采用NSGA-II 對機械臂的幾何臂長和電機、變速箱的選型進行優化.實驗結果表明,該算法可以優化出比UR5 質量更輕、可操作性更高的機械臂.Hassan 等[130]對一機械手爪的建模和設計優化問題進行了深入研究.首先,對機械手爪進行詳細的建模分析,構建了相應的幾何模型、運動學模型和動力學模型;然后,結合功能需求和模型中的幾何約束及力約束,將機械手爪的設計問題描述成為一個多目標優化問題,采用NSGA-II 求解出機械手爪的最優結構.Fan 等[10]采用基于Push 和Pull Search(PPS)框架的算法[131]對一種六自由度示教機械臂進行設計優化,獲得了比人類工程師設計更優的設計方案.通過實驗,表明了PPS-MOEA/D方法比其他幾種約束多目標進化算法更具優勢,同時也說明了采用PPS 框架,可以有效提升對應算法在解決機器人優化設計問題上的性能.
在機器人設計自動化方面,進化算法不僅可對具有不同幾何約束條件的本體結構進行自動設計優化,進化計算方法在機器人控制器的設計優化方面也取得了不少成果,尤其是對PID 控制器的設計優化.如Sharma 等[132]采用布谷鳥搜索算法對一種分數階模糊PID 控制器進行參數整定用于解決一種二連桿機械臂的軌跡跟蹤問題.實驗結果表明通過該算法優化的控制器不僅能保證機械臂具有最佳的軌跡跟蹤,而且能改善系統對模型不確定性、噪聲干擾和外部干擾的魯棒性.針對自主移動機器人的軌跡跟蹤問題,Ali 等[133]采用人工蜂群和遺傳算法分別對機器人的PID 控制器參數進行修正,并通過固定的測試軌跡驗證了控制器的有效性.實驗表明,采用人工蜂群算法優化的PID 控制器比采用遺傳算法優化的PID 控制器性能更優.Taherkhorsandi等[134]采用多目標遺傳算法對一種兩足機器人控制器的參數進行整定優化,得到一種PID 控制和滑模控制相結合的自適應魯棒混合控制器,可以有效地控制兩足機器人在斜坡側平面上平穩地行走.Son等[135]將改進的差分進化算法和神經網絡相結合,提出了一種自適應前饋神經網絡控制器和PID 控制器相結合的用于控制SCARA 并聯機器人關節角位置的控制器.其中改進的差分進化算法用于訓練優化一種逆神經網絡自回歸模型,進而產生一種自適應前饋神經網絡控制器用于識別SCARA 并聯機器人的非線性動態特性,通過實驗表明,經優化得到的自適應前饋神經網絡PID 控制器具有自適應自整定能力,且能對SCARA 并聯機器人進行精確、魯棒的位置控制.此外,針對移動機器人姿態變形問題,Hai 等[136]提出了一種基于進化博弈論的鴿子優化算法,對一種用于控制機器人姿態變形的自抗擾控制器的參數進行自動優化整定.該方法中,優化算法中的個體會隨著進化博弈過程而動態調整,最終得到的最優解作為自抗擾控制器的主要參數用于控制移動機器人.通過仿真實驗表明,該優化方法能有效提高自抗擾控制器的魯棒性.進化計算在機器人控制器方面的應用,除上述幾種機器人外,還可應用于車型機器人[137]、柔性機器人[138]、水下機器人[139]、挖掘機器人[140]和手術機器人[141]等的設計優化.
綜上,采用進化算法對機器人本體結構和控制器參數進行設計優化可以得到滿足一定性能要求的機器人系統.但在機器人設計自動化領域,機器人系統作為一種具有本體結構(肢體) 和控制器(大腦)復雜系統,如果僅僅考慮機器人本體或控制器的單一化設計優化,無法得到整體性能最優的機器人系統,而對機器人本體結構與控制器進行肢-腦協同優化設計是一種生成性能更優機器人系統的方法.通常的做法是首先手工設計機器人本體結構,然后對具有固定本體結構的機器人進行控制策略的設計與優化[142].近年來,研究者將生物進化論的思想引入到機器人本體結構與控制器的并行優化設計研究中,取得了一系列成功的應用.如Endo 等[143]采用遺傳算法對一種雙足類人機器人結構和控制器進行協同進化,結合機器人伺服模塊的特點,得到了詳細的機器人結構和行走模式.Marbach 等[144]結合基因編程和遺傳算法對同質模塊化機器人的形態結構和控制器進行協同進化設計,突破了在手動設計方法中人類自覺的局限性.文中采用基因編程的開放式拓撲結構搜索能力自動配置模塊,生成可以自主適應不同環境和任務的機器人;同時采用遺傳算法優化控制器參數,生成穩健的非線性振蕩控制器使在相對較小區域內快速搜索到機器人的不同運動策略.Villarreal-Cervantes 等[145]提出了一種混合梯度進化算法對平面并聯機器人結構及其控制系統進行協同設計優化,得到了最優的結構設計參數和控制器參數.實驗結果表明,該結構?控制器協同設計優化方法比順序設計方法收斂性更好、所設計出來的機器人性能更優.Valdez 等[146]采用三種啟發式算法分別對兩種串聯機械臂進行設計優化,通過對機械臂臂長和PID 控制器參數進行并行優化設計和序列優化設計的比較得出,并行優化設計方法比序列優化設計方法具有更好的全局搜索能力,優化過程更加高效,且可以同時得到最優的幾何參數和控制器參數.關于進化算法用于機器人本體?控制器的肢?腦協同進化的更為全面的工作總結可參見文獻[147].
綜上所述,進化計算在機器人系統設計自動化中的應用已經非常廣泛.但是同時對機器人本體和控制器設計的工作還比較有限,而且控制器的設計往往只考慮了連續類型的控制器.因此,同時考慮機器人本體、連續控制器和離散控制器的并行自動設計,是值得繼續研究的重要內容.
4 問題與展望
4.1 復雜機電系統設計自動化中存在的問題
雖然進化計算在復雜機電系統設計自動化方面取得了很多成果,但由于機電系統的復雜性,目前已有算法在約束處理、多指標優化、計算效率、知識運用等方面仍存在不足,距離廣泛的工業應用尚存在明顯的差距.本節將對復雜機電系統設計自動化中存在的問題進行分析,對未來進化計算的發展方向及其在復雜機電系統設計自動化上的應用進行展望,具體如下.
1)復雜機電系統的統一建模問題
復雜機電系統通常是一個包含多個領域的系統,且不同領域的子系統之間通常存在相互的耦合,缺乏一套能有效對機電系統進行統一建模的方法.
2)復雜機電系統優化問題的求解
復雜機電系統的優化問題通常是帶約束條件的沖突的多目標優化問題,目前在該領域的研究成果相對較少.此外,復雜機電系統中的目標和約束可能是計算昂貴的,設計變量既包含連續變量又包含離散變量,使得求解的問題十分復雜.如何設計高效的約束處理機制、設計離散與連續變量混合的求解機制、設計高效的約束多目標進化算法[148?149]和設計基于替代模型的約束多目標進化算法[150?151]是復雜機電系統優化問題中仍然存在的問題.
3)進化計算用于復雜機電系統智能化、網絡化、綠色化等方向中的問題
智能化是21 世紀復雜機電系統發展的重要方向,它的目的是使機電系統具有一定的判斷思維、邏輯思維、決策思維等能力.復雜機電系統智能化涉及智能控制、任務規劃與決策、故障診斷等多個方面,其中很多問題可以歸結為具有挑戰性的復雜優化問題,可以在建模的基礎上采用進化算法進行直接求解.涉及復雜機電系統判斷、邏輯與決策的問題,需要結合進化算法和神經網絡[152?155]、模糊推理[156]、決策樹[157]等技術來實現復雜機電系統的智能化.
網絡技術的飛速發展對復雜機電系統有重大影響,使其朝著網絡化方向發展.機電系統網絡化發展過程中的一個核心問題是網絡資源的調度.使用進化算法可以對網絡資源進行調度[158?159],一定程度上可以幫助機電系統更好地實現網絡化,但網絡資源的調度對于大規模[160?161]、高并發[162]和實時性[163]等方面的要求給進化算法帶來新的挑戰.
降低復雜機電系統的能耗消耗、降低其對環境的污染、提高機電系統的回收性,實現機電系統的綠色化是未來復雜機電系統發展的必要方向.綠色化涉及了機電系統的設計、運用、維護、回收等諸多環節甚至需要多階段綜合考慮,一個共同的特點是建模復雜、優化指標多、約束條件多.而進化算法特別適合求解這類優化問題,特別是約束高維目標進化算法[164?167].另外,對于建模復雜或優化目標與約束條件難以顯式建立的問題,開展基于數據驅動的建模與優化[168?170]是一個新的值得研究的方向.
4.2 進化計算在復雜機電系統設計自動化中的展望
針對復雜機電系統設計自動化中存在的問題,我們擬從以下5 個方面進行展望:
1)復雜機電系統的多角度統一建模
構建綜合鍵合圖模型、幾何建模與方程式機理模型的統一建模方法,將是實現機電系統統一建模的有效手段.這是因為鍵合圖模型雖然可以很好地支持自動優化設計,但卻難以表達系統的幾何尺寸及裝配關系等信息,因此需要加入系統的幾何建模來幫助進行自動設計.而另一方面,幾何建模雖然可以產生細節的模型并嚴格定義子系統間的裝配關系,但同時其可搜索的設計空間也受到限制,因此難以作為唯一的建模方法滿足設計自動化的要求.方程式機理模型是和優化算法可以進行無縫對接的最高效的一種模型表達形式.因此,綜合了多種建模方法的多角度統一建模方法是一個非常有潛力的研究方向.
2)復雜機電系統優化問題的約束處理機制
在約束處理機制方面,主要開展以下4 個方面的研究.a)針對等式約束開展研究.機電系統建模過程中,可能會涉及到一系列等式約束.目前專門針對等式約束的優化方法非常有限,通常的做法是引入一個較小的正數ε,把一個等式約束變換為2個不等式約束.但是對具有較高維度的搜索空間而言,ε的值往往難以確定.b)針對約束的類型設計合適的約束處理機制.在進化過程中會產生大量數據,對這些數據進行挖掘可以進一步用來對約束條件進行分類.例如,通過數據擾動和統計的方法可以把約束分為可行性困難、收斂性困難和多樣性困難三種難度的類型,針對每種難度類型的約束設計合理的約束處理機制進行動態的求解.c)開展昂貴約束條件的優化問題研究.在復雜機電系統中,有些優化問題的約束條件通常需要調用仿真軟件,計算昂貴,而傳統的優化方法無法對這類問題進行有效的求解.因此,對約束條件建立替代模型,研究基于代理模型的約束處理方法是一條可行的路徑.d)開展約束邊界搜索的研究.優化問題的最優解往往集中在無約束的Pareto 前沿或約束的邊界上,可以通過進化算法很容易求解.而約束邊界的求解目前仍然是一大難題,如何能快速有效地對約束的邊界進行定位是一個值得深入研究的方向.
3)針對復雜機電系統優化問題的約束多目標優化方法
通常,在實際設計過程中,設計者考慮的不僅僅是單一設計目標,而且會同時考慮多個相互沖突的設計目標,因此對機電系統的優化設計往往可以描述為多目標優化問題.在機電系統的自動設計研究中,多目標進化算法(Multi-objective evolutionary algorithms,MOEAs)[171?180]已逐步成為一種解決上述多目標優化問題的常用方法.在多目標進化算法中,常常需要采用不同的約束處理技術[181?184]來解決帶約束的多目標優化問題.此外,目前用于評價約束多目標進化算法的測試問題集不僅由于其難度大而相對較少,甚至缺乏能夠有效測試約束多目標進化算法性能的測試問題集.針對現有約束多目標測試問題的不足,Fan 等[185]首次對約束問題的難度類型進行定義,提出了可行性困難、收斂性困難和多樣性困難等三種難度的約束類型.每種約束類型的難度都可以自由調整,問題可以進行自由定制,能夠全面綜合評估約束多目標進化算法在單一難度或多種難度下的性能.
在工程優化領域,大多數工程設計問題需要通過實驗或仿真來評估與設計變量相關的設計目標函數和約束函數.而這些設計中普遍存在單次仿真耗時長、適應度值評估時間長和計算昂貴的問題,例如機翼外形設計、結構設計等.目前,針對這類優化設計問題,一種典型的解決方案是基于替代模型輔助的進化算法[186?189],通過在進化算法中使用替代模型,可以減少代價很高的目標函數的評估,從而減少對昂貴問題進化優化的計算時間和成本.
綜上可知,盡管在多目標優化算法研究方面已取得了一些成果,但在對實際機電系統進行設計的過程中,設計人員除要考慮多個設計目標外,還要考慮大量的設計約束、設計評估以及計算成本,因此為了更好地解決復雜機電系統的優化設計問題,得到最優設計方案,進一步加強對帶有復雜約束的多目標優化算法的研究將會是一項非常有意義的工作.
4)融合約束多目標進化算法和知識提取的設計自動化方法
在采用進化算法進行優化設計過程中,會產生大量的數據,這些數據蘊含著大量與優化設計問題相關的隱含知識.在采用進化算法進行優化設計的過程中,通過數據挖掘與知識提取可以挖掘出有效的知識,一方面能幫助設計者提升對優化問題的認識,精簡優化問題的模型;另一方面,這些獲取的知識可以嵌入到進化算法中,進一步提升進化算法的求解精度和效率.機器學習作為一種常用的知識提取方法,得到了廣泛的應用.將機器學習方法融入到進化算法中,不僅提升了算法的性能,而且可以挖掘出進化設計過程中隱含的設計知識[190?191],甚至還可以將獲得的知識有效地轉化、遷移到其他場景中,用于解決新的優化設計問題[192].另外,機器學習中分類[193]和聚類[194?195]方法可在群體選擇和新解產生等方面輔助多目標進化算法提高搜索效率.因此通過對約束多目標進化算法與設計知識的提取進行合理融合,構建出一套對復雜機電系統進行自動優化設計的方法,是復雜機電系統設計自動化研究的一個極具潛力的發展方向.
5)基于基因編程和深度神經網絡的機電系統視覺感知系統的設計自動化
隨著智能化時代的到來,對復雜機電系統智能水平的要求越來越高,特別是大量的智能機電系統都包含了視覺處理的模塊.因此,未來實現復雜機電系統設計自動化的關鍵內容之一將是對其視覺系統進行設計自動化.具體而言,針對不同的應用場景,設計自動化方法將可以自動構建性能最優的視覺處理模型(如各種深度神經網絡[153,196?197]等)來實現復雜機電系統的視覺感知功能.在這項研究中,如何針對不同的應用場景,自動進行模塊庫的選擇與構建至關重要.這是因為一旦確定了神經網絡的基本模塊庫及其構建規則,其設計空間也完全確定.神經網絡的設計空間定義了在當前編解碼方式下可以表達的所有神經網絡架構的集合.更大的設計空間可能包含了更好的解,但同時也意味著可能需要更多的計算資源以及計算時間來進行空間的自動搜索.這個對設計空間自動搜索的過程其實就是對神經網絡的拓撲結構和參數進行同時優化的過程.現有的深度神經網絡的結構主要是依賴人的經驗進行設計,是一個反復試驗的過程(主要是手動完成),比較受限于人類的經驗和直覺,在發現突破性的創新結構方面效率不高,而采用設計自動化的方法可以大大提高這方面的效率.另一方面是深度神經網絡的參數優化主要是通過梯度算法進行(例如SGD[198]、Adam[199]).雖然它們在提高參數空間的搜索效率方面比較有效,但容易被局部最優、鞍點和嘈雜的梯度所困.而采用基于多場景(多任務)的基因編程(Multi-tasking genetic programming)方法[200?201],可以針對不同應用場景,同時對神經網絡的拓撲結構和參數進行自動優化,并有可能產生創新的神經網絡結構,系統化持續提升復雜機電系統的視覺感知模塊的處理能力及智能水平.
5 結論
隨著機電系統在工業中的重要性日益凸顯,尤其是機器人這一典型的復雜機電系統大量應用于工業制造、農業生產、服務業和國防科技等領域,機電系統設計自動化擁有巨大的發展潛力,并有可能成為繼電子系統設計自動化后的下一個大的發展浪潮,推動機電系統在學術界及產業界的進一步發展.
復雜機電系統是一類由機械、電子電路、控制、液壓等多個學科領域綜合而成的多能域系統,其設計優化問題往往被描述為一類帶約束的多目標優化問題[10,123,202],而進化算法對解決約束多目標優化問題具有天然的優勢.本文對進化計算在復雜機電系統設計自動化方面的應用研究做了較為全面的回顧,并對進化計算在機器人這一典型的復雜機電系統中的應用從機器人本體、機器人控制器、機器人本體結構與控制器協同設計優化三個方面進行了詳述.針對復雜機電系統設計優化過程中缺少統一建模方法、復雜機電系統優化問題評估代價昂貴等突出問題以及進化計算用于復雜機電系統智能化、網絡化、綠色化等方向中的問題,本文從構建復雜機電系統多角度統一建模方法、復雜機電系統優化問題的約束處理機制、約束多目標優化方法、融合約束多目標進化算法和知識提取的設計方法以及基于基因編程和深度神經網絡的機電系統視覺感知系統的設計自動化等5 個方面進行了總結與展望.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34