基于一致性的分布式變結構多模型方法
2021-08-28 04:55:32王昱淇盧宙蔡云澤
自動化學報 2021年7期
王昱淇 盧宙 蔡云澤
機動目標跟蹤(Maneuvering target tracking,MTT)是狀態估計領域的重要研究方向之一,廣泛應用于雷達跟蹤、飛行目標監測、導航等領域.目前機動目標跟蹤方法的研究主要基于卡爾曼濾波(Kalman filter,KF).卡爾曼濾波是一種基于先驗模型的估計方法,要求先驗模型準確,即目標運動模式已知.然而,機動目標的機動性就體現在其運動模式未知且劇烈變化,因此單模型方法難以有效解決機動目標跟蹤問題.基于多模型的跟蹤方法是目前機動目標跟蹤的重要研究領域.以交互式多模型(Interacting multiple model,IMM)[1]為代表的多模型機動目標跟蹤方法結合隱馬爾科夫模型(Hidden Markov models,HMM),利用模型轉移概率提高對機動目標的狀態估計精度.IMM 方法采用模型集,但Li 認為實際模式空間與模型集合不一定匹配,且模型集合應適應外界條件變化,并提出變結構多模型方法(Variable structure multiple model,VSMM)[2?5].由于其良好的狀態估計效果和靈活性,VSMM 方法被國內外學者廣泛關注.
隨著傳感器、計算機和通信技術發展,多傳感器信息融合逐漸成為研究熱點,可分為集中式(Centralized)、分布式(Distributed)與混合式(Hierarchical)三種融合架構[6].基于一致性的分布式融合架構無需融合中心,具有通信帶寬要求低、通信能量損耗低、且對復雜網絡適應性強等優點,日益受到國內外學者關注.基于一致性的分布式狀態估計包括多種實現形式,例如卡爾曼一致濾波(Kalman consensus filter,KCF)[7?9]、信息一致濾波(Information consensus filter,ICF)[10?11]等.
目前對一致性濾波的研究主要基于單模型方法,主要關注傳感器網絡內丟包[12]、時延[13]、動態網絡拓撲[14]、自適應一致性濾波[15]、網絡能量優化[16]以及帶牽引控制[17]等問題.近年來,考慮到多模型方法比單模型方法有更好的機動目標跟蹤效果,Chisci等學者結合多模型思想,提出分布式交互式多模型估計方法(Distributed interacting multiple model,DIMM)[18?20].雖然變結構交互式多模型比交互式多模型具有更好的跟蹤精度,但由于VSMM 方法中模型集隨時可能擴增或刪減,難以直接應用于基于一致性的分布式估計方法,因此目前已發表的相關研究成果不多.
本文重點研究如何將變結構多模型方法有效地引入分布式非線性狀態估計方法,具體研究內容如下:首先為了解決量測方程非線性的問題,研究了一類無跡信息濾波方法(Unscented information filter,UIF);通過對變結構多模型方法進行改進,提出基于可能模型集的期望模式擴增方法(Expected-mode augmentation based on likely model-set,EMA-LMS),進而將VSMM 應用于分布式狀態估計,提出分布式變結構多模型方法(Distributed variable structure multiple model,DVSMM).仿真實驗結果驗證了本文提出方法的有效性.
1 問題模型
本節介紹分布式傳感器網絡的圖論表示以及雷達和紅外傳感器的量測模型.
1.1 傳感器網絡模型
通常用圖G(V,E) 對傳感器網絡建模.頂點集V{1,2,···,n}表示網絡中的傳感器節點.如果傳感器節點i和j可以通信,則認為圖中這兩個節點之間存在邊,即 (i,j)∈E.鄰接矩陣A是n行n列的布爾矩陣,記A[a ij],如式1 所示:

記Ni{j:(v i,v j)∈E}為傳感器節點i可以通通信的節點集,JiN i ∪{i}.如圖1 所示:包含6 節點的分布式傳感器網絡.

圖1 用無向圖表示的傳感器網絡Fig.1 A sensor network expressed by undirected graph
該傳感器網絡對應的鄰接矩陣如式(2)所示:

1.2 量測模型
本文研究二維平面內直接坐標系中的機動目標跟蹤問題.記視線與直角坐標系x軸正方向的夾角記為方位角θ,傳感器與目標的距離記為ρ.雷達可獲得目標距離ρ與方位角θ量測值,而紅外傳感器僅獲得目標方位角θ,如圖2 所示.
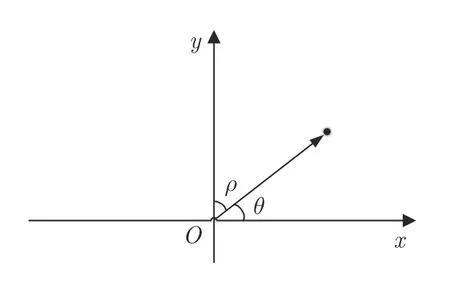
圖2 雷達和紅外傳感器量測模型Fig.2 Measurement model of radar and infrared
構造極坐標 (ρ,θ) 與二維平面上直角坐標描述(x,y)一一映射,如式(3)所示,方位角的范圍須為θ ∈[0,2π)或θ ∈(?π,π] :

當θ ∈[0,2π)時,直角坐標 (x,y) 轉換為極坐標(ρ,θ)的映射關系如式(4)所示.

式中,x t和y t表示目標位置;x s和y s表示傳感器位置.式(4)中的映射關系不具有連續性,即存在一組由奇異點構成射線y0,x>0. 且目標方位角在該射線兩側發生突變,導致目標方位角誤差增大,影響濾波器的狀態估計結果.
為避免由反正切函數不連續引起的誤差,需判斷映射關系是否奇異.
首先計算相鄰兩個時刻目標方位角的順時針變量?θacw與逆時針變量 ?θcw,構造具有連續性的映射關系,如式(5)所示,計算方位角的變化量.


圖3 θ1 ?θ2 的定義Fig.3 Definition ofθ1 ?θ2
2 無跡信息濾波
本節介紹下一節中DVSMM 方法所采用的無跡信息濾波UIF[21]原理.無跡信息濾波與無跡卡爾曼濾波(Unscented Kalman filter,UKF)均通過Sigma 點采樣計算狀態向量的一階矩與二階矩,區別在于UIF 采用信息矩陣與信息狀態向量進行量測更新.
設x為n維隨機向量,其均值和協方差分別為和Px.f(·) 為非線性函數:
1)計算 2n+1個Sigma 點ξι:

式中,λ為尺度參數;表示用(n+λ)P x平方根的第i行或第i列來構造Sigma 點[22?24].
2)每個Sigma 點通過非線性函數傳播,得到y i:

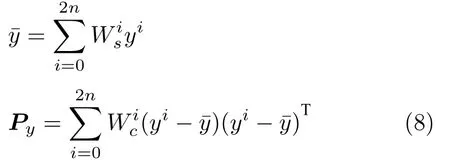
3)計算y的均值和協方差Py.
設離散時間非線性系統的狀態方程和量測方程如式(9)所示:

式中,x k表示目標狀態向量;z k表示傳感器量測向量;fk(·) 和hk(·) 分別表示非線性的狀態函數和量測函數;wk~N(0,Q k) 表示過程噪聲;v k~N(0,R k)表示量測噪聲.
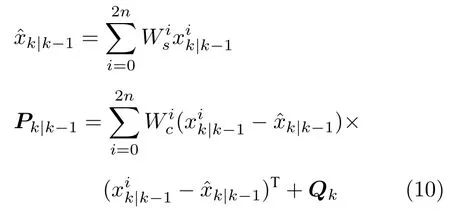
1)一步狀態預測

2)量測更新


計算量測預測和狀態?量測協方差矩陣:
引入偽測量矩陣計算信息狀態貢獻i k和對應的信息矩陣I k[21]:

通過i k和I k計算后驗信息向量和對應的信息矩陣Yk|k:

考慮到第1.2 節所述的方位角突變的問題,需要按照如下兩個步驟修改UIF:

3 分布式變結構多模型方法
本節將分析變結構多模型方法應用在分布式狀態估計所面臨的關鍵問題.通過結合期望模式擴增方法和可能模型集方法,提出基于可能模型集的期望模式擴增方法EMA-LMS 與分布式變結構多模型跟蹤方法DVSMM.
3.1 VSMM 方法在分布式估計的關鍵問題
在DIMM[18?20]方法框架下,將每個模型對應的預測信息或傳感器后驗估計信息與通信鄰域中其他傳感器對應模型中的信息進行一致性加權融合,如圖4 所示:
圖4 中,每個傳感器具有相同的交互式多模型集,且模型數量為M.假設傳感器s和j相鄰,本地傳感器與相鄰傳感器進行一致性加權融合的變量可分為三類:1)本地先驗信息向量及其對應的信息矩陣Yk|k?1;2)本地信息狀態貢獻i k和對應的信息矩陣I k[18];3)本地后驗信息向量和對應的信息矩陣Yk|k[19].此外,分布式交互式多模型方法將對每個模型下的模型似然對數與相鄰傳感器對應模型下的模型似然對數進行一致性加權融合[18].

圖4 交互模型預測信息的DIMM 方法示意圖Fig.4 Diagram of DIMM with mode-matched PDFs
但上述DIMM 方法框架并不適用于分布式變結構交互式多模型方法.VSMM 方法中不同時刻模型集的模型種類與數量可能不同.即在每個方法周期內,每個傳感器所使用的模型可能不一樣.因此實現分布式VSMM 方法主要有面臨兩個難點:
1)信息濾波器中先驗及后驗的信息向量y k、對應的信息矩陣Y k和多模型方法中的模型似然都依賴于模型和傳感器本地量測向量z k來計算.由于VSMM 方法每個時刻使用的模型種類和數量都在變化,因此無法像分布式IMM 方法那樣對每個模型對應的這些信息使用一致性加權融合.
2)在線性系統中與非線性系統中,信息狀態貢獻i k和對應的信息矩陣I k的計算不但依賴于本地量測z k,也依賴于模型.
如圖5 所示,每個傳感器每個時刻所交互的模型不同(VSMM 方法核心特點),因此無法采用DIMM方法的思路實現分布式狀態估計.

圖5 分布式變結構多模型方法面臨難題Fig.5 The difficulty in achieving DVSMM
3.2 分布式變結構多模型方法
由于VSMM 方法在不同時刻選用不同的模型集進行交互,因此難以在相鄰傳感器之間直接交互模型的信息向量和信息矩陣.為解決這一問題,本文對Li 提出的VSMM 方法結合無跡信息濾波UIF進行改進,提出分布式變結構多模型跟蹤方法(DVSMM).通過在相鄰傳感器之間直接傳遞量測向量,并在每個傳感器內部平行計算采用不同模型的UIF對應的信息向量、信息矩陣和模型似然函數,最后進行一致性加權融合.DVSMM 具體方法如下:
假設本地傳感器為傳感器s,通過MSA 方法可得k時刻本地用于狀態估計的新模型集合假設每個方法周期開始時,每個傳感器已經向相鄰的傳感器發送本時刻自身的本地量測z k和位置p k,且每個傳感器可知其他傳感器量測向量來自的傳感器類型(雷達或紅外).記JsN s ∪{s},則傳感器s在本方法周期可用的傳感器量測為,m ∈J s.
對模型i,目標的狀態轉移方程為:

傳感器s的量測方程為:

假設k ?1時刻基于的本地目標狀態估計、狀態估計誤差協方差模型概率均已知.分布式變結構多模型方法的模型集合包括J s{N s ∪s}中所有傳感器的量測信息m ∈J s,以及一致性加權融合過程.
在k時刻,傳感器s內模型集合的一步預測和量測更新方法流程如下 (πij為模型轉移概率):
1)模型交互(對?m(i) ∈
計算模型預測概率:

計算交互權值:

計算交互估計和方差:
2)模型條件濾波(對?m(i) ∈
狀態預測:
量測更新:

式中,Nm為傳感器m的量測向量維度;|·|表示矩陣的行列式.
對模型似然求對數

至此,獲得模型m(i)下,關于J s內的所有量測數據m ∈J s的信息狀態貢獻、對應的信息矩陣和模型似然的對數
進行一致性加權融合:

式中,w為一致性加權系數.常用的一致性加權系數有最大度加權和Metropolis 加權[25],本文采用Metropolis 加權系數.
更新每個模型下的信息向量和信息矩陣更新:
進而得到每個模型下的狀態估計和狀態估計協方差:

至此,DVSMM 方法具有明確的輸入和輸出結構與遞推公式:

每個傳感器通過與臨近傳感器交互量測信息及傳感器位置,通過計算和][2],即可將各種單傳感器下的VSMM 機動目標跟蹤方法遷移到傳感器網絡中,進行分布式狀態估計.
DVSMM 更新模型集方法流程如圖6 所示.

圖6 DVSMM 更新模型集方法流程圖Fig.6 Diagram of DVSMM updating model set
3.3 基于可能模型集的期望模式擴增方法
VSMM 方法所使用的模型集合隨時可能擴增和刪減,其核心在于模型集自適應方法(Model-set adaptation,MSA)[3]和基于模型集序列狀態估計方法(Model-set sequence conditioned estimation,MSE)[2,25].目前,模型集自適應方法包括可能模型集(Likely-model set,LMS)方法[4]、期望模式擴增(Expected-mode augmentation,EMA)方法[5]等.其中,LMS 方法根據模型概率,在一個包含較多模型的模型集中選擇部分模型來參與濾波估計,能夠減少每個方法周期參與濾波的模型數量,降低多模型方法的計算量.EMA 方法適用于模型具有可加性,模式空間連續的情況.它在每個方法周期對已有的模型求加權和(權值為模型概率),計算得到期望模型,并把期望模型擴增到模型集中參與濾波估計.當目標的運動模式不落在基礎模型上時,能夠顯著改善跟蹤效果.而當目標的運動模式恰好落在基礎模型上時,跟蹤效果相較于IMM 方法有所下降.EMA 方法取決于模型集的準確程度,若目標運動模式恰好符合模型集,EMA 方法跟蹤效果.然而,考慮到實際條件下目標真實運動模式未知且難以預測,大部分情況下目標真實運動模式并不符合EMA 模型集.
針對目標真實運動模式未知且難以預測的問題,本節提出基于可能模型集的期望模式擴增方法EMA-LMS,并通過仿真分析及仿真實驗結果說明分布式DVSMM 方法框架的通用性和易于實現的特點.
EMA-LMS 方法的優點在于,既能夠達到EMA方法跟蹤精度,又能降低每個時刻參與濾波的模型數量,即降低運算時間復雜度.本文提出的DVSMM方法通過拓展VSMM 的輸入,將本地傳感器的量測信息拓展為通信鄰域內其他傳感器的所有量測信息,并進行一致性融合估計.
EMA-LMS 方法流程如下:

3)統計與Mp毗鄰(轉移概率不為0)的模型集合Ma,得到本時刻需要添加的基礎模型M nM a ∩.本時刻需要刪除的候選基礎模型M dM u ?M a.
4)若Mn?,轉到第5) 步.否則計算[M n,M k?1],{得到Mn各模型狀態估計值、協方差和模型概率:.然后進行期望模型的再次更新,計算估計融合 [M f,M n,E k;M k?1],由得到的模型概率計算新的期望模型.再計算一致性融合估計 [M f,M n,;M k?1],得到本算法周期的總體估計結果并令MkM f ∪M n ∪,且記Ek
4 仿真分析
本節通過仿真分析說明本文提出的DVSMM方法的有效性.考慮一個雷達和紅外傳感器網絡,所有傳感器在仿真過程中始終能觀察到目標.
通過4 種方法驗證本文提出的分布式VSMM框架的有效性.DIMM1 和DIMM2 分別使用了文獻[18]和[19]的分布式IMM 方法框架.DIMM 3表示用本文提出的DVSMM 框架實現的分布式IMM方法.DEMA-LMS 為用本文提出的DVSMM 框架實現的分布式EMA-LMS.
假設目標為二維平面機動目標,目標的狀態變量為x,x與y分別表示目標在x軸、y軸方向上的位置,與分別表示目標在x軸、y軸方向上的速度.目標狀態轉移方程如式(32)所示:

式中,uk[a x a y]T為目標加速度,可以進行階躍變化;wk為過程噪聲,wk~N(0,Q k)Q k) ;Fk表示狀態轉移矩陣;Gk為加速度輸入矩陣;Γk為噪聲傳遞矩陣.

式中,T為采樣周期;III2×2表示二階單位矩陣;?表示矩陣的直積.
目標初始狀態x0[0 1500 0 1500]T,過程噪聲方差Qkdiag{0.01,0.01}.仿真時長為300s,T1s.目標運動加速度輸入如表1 所示:

表1 目標運動模式的變化Table 1 Target mode switching
仿真中使用的基礎模型集均為文獻[4]中包含13 個模型的基礎模型集,是具有固定加速度輸入的二維CV 模型.對于模型j,目標狀態轉移方程為:

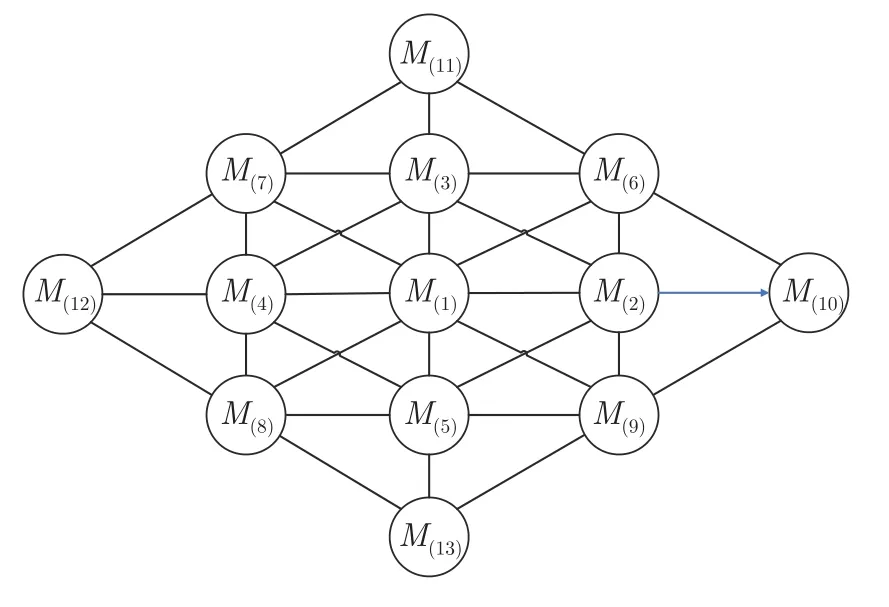
圖7 模式空間內的13 個基礎模型Fig.7 Basic model-set with 13 models


雷達傳感器位置量測誤差標準差為50 m,角度量測誤差標準差為0.01°.紅外傳感器角度量測誤差標準差為0.01°.雷達傳感器共4 個,坐標分別為(1,0.4),(2,1.7),(3.7,1.7),(5.5,2).紅外傳感器共8 個,坐標分別為(2,1.2),(0.8,1.4),(3,1.4),(2.5,1),(4.1,3),(3,2),(4.5,1.8),(4,2.5).目標運動軌跡和傳感器位置如圖8 所示.
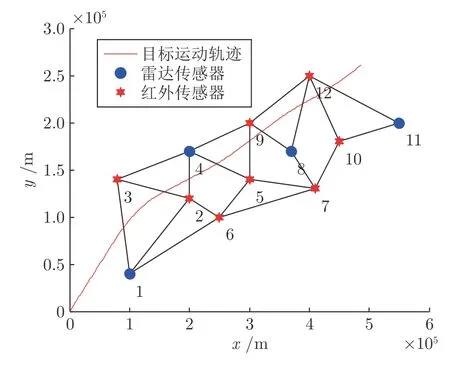
圖8 目標運動軌跡與傳感器類型Fig.8 Target positions and sensors types
為了比較一致性濾波的跟蹤效果使用兩類指標作為方法性能的衡量指標:平均位置Ep(k) 和速度估計誤差Ev(k) 用來衡量傳感器節點狀態估計準確性;平均位置估計一致性誤差Dp(k) 和平均速度估計一致性誤差Dv(k) 衡量每個傳感器節點狀態估計的一致程度.評價指標計算見式(37)和(38).

式中,N為傳感器節點數量;x與y、與分別表示狀態向量中的位置和速度;和分別表示節點位置和速度估計的平均值:

進行50 次蒙特卡洛重復試驗,三種方法的一致性權值都使用Metropolis 加權.仿真結果如圖9~圖12 所示:

圖9 平均位置估計誤差Fig.9 Average position estimation error
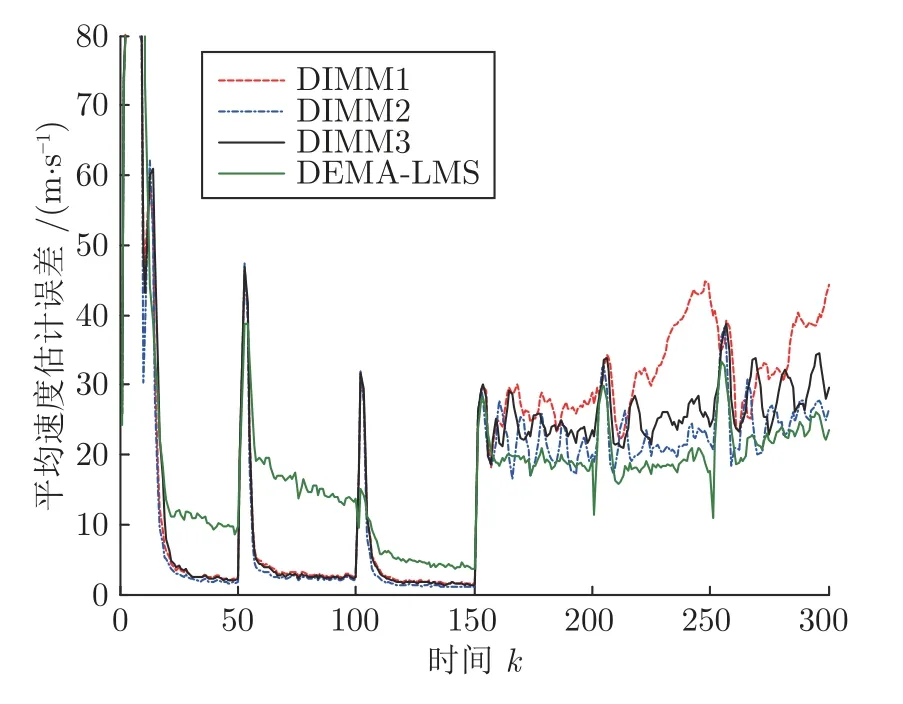
圖10 平均速度估計誤差Fig.10 Average velocity estimation error

圖11 平均位置估計一致性誤差Fig.11 Average position estimation consensus error

圖12 平均速度估計一致性誤差Fig.12 Average velocity estimation consensus error
在圖9~12中所示仿真實驗結果中,當k <150時,目標運動模式突變前后均符合EMA 方法13 個基礎模型.而當 150 1)盡管EMA-LMS 方法比較復雜,包含很多的模型擴增和刪除步驟,但還是能非常方便地將其應用于分布式狀態估計中,說明了本文提出的分布式VSMM 方法的有效性; 2)當目標的運動模式落在基礎模型上時,通過DVSMM 實現的分布式IMM 與信息狀態貢獻和對應的信息矩陣一致的分布式IMM 方法效果類似; 3)當目標的運動模式落在基礎模型間隙時,使用DVSMM 方法實現的分布式IMM 在運動模式位于基礎模型間隙時效果比兩種分布式IMM 方法更好; 4)EMA-LMS 方法運用在分布式狀態估計中,效果顯著,體現在當目標的運動模式落在基礎模型間隙時,具有高于另外三種方法的狀態估計準確性和一致性. 通過上述仿真實驗結果與分析,驗證了本文提出的分布式VSMM 方法的有效性.相比于分布式IMM 方法,分布式VSMM 能夠根據需要靈活調整模型集結構,具備更好的適應性和狀態估計效果. 本文根據一致性理論,對變結構交互式多模型方法進行改進,與無跡信息濾波相結合,提出基于一致性的分布式變結構多模型狀態估計方法框架.本文方法能夠在基于一致性的分布式狀態估計中引入各種已有的變結構多模型方法,具有良好的跟蹤精度和狀態估計一致性.5 結論
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
燕山大學學報(2015年4期)2015-12-25 02:19:49
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32