考慮輸出約束的機(jī)械臂自適應(yīng)神經(jīng)網(wǎng)絡(luò)魯棒控制
2021-08-30 02:04:20王鵬飛姚建勇周海波方靖荃
測(cè)控技術(shù) 2021年8期
王鵬飛,胡 健,,姚建勇,周海波,方靖荃,李 曦
(1.南京理工大學(xué) 機(jī)械工程學(xué)院,江蘇 南京 210094;2.中南大學(xué) 高性能復(fù)雜制造國(guó)家重點(diǎn)實(shí)驗(yàn)室,湖南 長(zhǎng)沙 410083)
機(jī)械臂的高精度運(yùn)動(dòng)控制在當(dāng)今工業(yè)自動(dòng)化領(lǐng)域中起著重要作用。隨著計(jì)算機(jī)技術(shù)和控制理論的飛速發(fā)展,基于模型的控制方法逐漸成為機(jī)械臂控制的主流方法,如反饋線性化控制方法[1-2]。但是,在實(shí)際工程中,往往難以獲得精確的系統(tǒng)數(shù)學(xué)模型[3],繼而又發(fā)展出了自適應(yīng)控制(Adaptive Control,AC)方法[4-6]和自適應(yīng)魯棒控制(Adaptive Robust Control,ARC)方法[7-8],但是這些方法都存在一定的缺點(diǎn)。傳統(tǒng)的機(jī)械臂自適應(yīng)控制大都采用滑模自適應(yīng)的方法,這種方法在系統(tǒng)存在時(shí)變參數(shù)時(shí)往往會(huì)失效,并且在控制過(guò)程中容易出現(xiàn)抖振的現(xiàn)象。ARC在系統(tǒng)存在強(qiáng)干擾時(shí)則需要不斷調(diào)大增益,而過(guò)高的增益會(huì)使系統(tǒng)振蕩劇烈甚至完全不穩(wěn)定。
神經(jīng)網(wǎng)絡(luò)已經(jīng)被證明是處理系統(tǒng)參數(shù)不確定性和復(fù)雜外部干擾的有力工具[9]。例如,Lewis在這一領(lǐng)域做了很多研究[10],并提出了一套基于高斯基函數(shù)的單層神經(jīng)網(wǎng)絡(luò)控制策略。但是這種網(wǎng)絡(luò)只能實(shí)現(xiàn)函數(shù)的局部逼近,其近似精度受到了限制。另外,在構(gòu)建神經(jīng)網(wǎng)絡(luò)的過(guò)程中,神經(jīng)網(wǎng)絡(luò)的重構(gòu)誤差是難以避免的,但是許多文章中只是把重構(gòu)誤差看作一個(gè)有界值的擾動(dòng)。在本文中將設(shè)計(jì)一個(gè)多層的前饋神經(jīng)網(wǎng)絡(luò)逼近器對(duì)模型進(jìn)行逼近,不但提高了近似精度,并且考慮了一個(gè)可以在線更新的魯棒項(xiàng)來(lái)減小神經(jīng)網(wǎng)絡(luò)的重構(gòu)誤差,而不需要知道其界值。相比于傳統(tǒng)的自適應(yīng)方法,不僅可以很好地處理系統(tǒng)中可能存在的時(shí)變參數(shù)和外部強(qiáng)干擾,而且無(wú)須知道系統(tǒng)的名義值參數(shù)。另外,神經(jīng)網(wǎng)絡(luò)本身也可以避免系統(tǒng)的高增益控制。
另一方面,機(jī)械臂的約束控制問(wèn)題正在成為控制界的關(guān)注熱點(diǎn)。考慮到機(jī)械臂系統(tǒng)在實(shí)際工程中存在的各種約束問(wèn)題,往往要對(duì)系統(tǒng)的輸出或者某個(gè)狀態(tài)進(jìn)行約束。另外,為了提高機(jī)械臂的控制精度和收斂速度,也要對(duì)系統(tǒng)的輸出加以約束[11-12]。為了處理輸出約束問(wèn)題,已經(jīng)有許多學(xué)者開(kāi)始研究不同的技術(shù)[13-14]。文獻(xiàn)[15]中使用了不變集定理的概念處理輸出約束,文獻(xiàn)[16]提出了一種自適應(yīng)位置力控制器用于處理機(jī)器人操縱器的約束問(wèn)題。相比于其他實(shí)現(xiàn)約束控制的方法,基于障礙李雅普諾夫函數(shù)實(shí)現(xiàn)的約束控制[17]對(duì)于高階非線性系統(tǒng)尤其適用,并且具有計(jì)算量小和結(jié)構(gòu)簡(jiǎn)單等優(yōu)點(diǎn)[18]。
本文通過(guò)在反步控制中引入障礙李雅普諾夫函數(shù)實(shí)現(xiàn)輸出約束,不僅提高了機(jī)械臂的控制精度和收斂速度,同時(shí)進(jìn)一步降低了控制器的增益。另外,通過(guò)在魯棒項(xiàng)中使用雙曲正切函數(shù),避免了出現(xiàn)符號(hào)函數(shù),從而可獲得光滑的控制律。
1 問(wèn)題描述和預(yù)備知識(shí)
1.1 符號(hào)和定義

1.2 問(wèn)題描述
對(duì)于n自由度的剛性機(jī)器人系統(tǒng),其動(dòng)力學(xué)模型可以表示如下:

(1)

特性1:慣性矩陣D(q)是一個(gè)對(duì)稱且正定的矩陣。

1.3 控制目標(biāo)與假設(shè)
控制目標(biāo)是為機(jī)器人系統(tǒng)設(shè)計(jì)一個(gè)魯棒性較強(qiáng)的控制器,使其可以跟蹤上預(yù)定的期望軌跡,并且它的輸出是有界的,基于目標(biāo)給出如下假設(shè)。

假設(shè)2:假設(shè)期望跟蹤軌跡已知,且是連續(xù)有界的。
1.4 相關(guān)引理
引理1[9]:對(duì)于前饋神經(jīng)網(wǎng)絡(luò),如果有兩個(gè)權(quán)值矩陣同時(shí)在線更新,則神經(jīng)網(wǎng)絡(luò)的估計(jì)誤差為
(2)

引理2:在引理1的基礎(chǔ)上,下面的不等式成立:
|δ(t)|≤ξ*p
(3)

引理3[11]:b∈R是任意正常數(shù),對(duì)于任意滿足|x|<|b|的x∈R,下面的不等式成立:
(4)
引理4:不等式0≤|a|-atanh(a/ρ1)≤0.2785ρ1成立,其中ρ1>0,a∈R。
2 控制器設(shè)計(jì)
(5)
定義期望軌跡xd,則系統(tǒng)的誤差函數(shù)可以表示為
(6)

(7)
2.1 基于系統(tǒng)模型的反饋線性化控制器設(shè)計(jì)
選擇障礙李雅普諾夫函數(shù):
(8)
對(duì)李雅普諾夫函數(shù)求導(dǎo)得:
(9)
選擇第二個(gè)李雅普諾夫函數(shù):
(10)
求導(dǎo)可得:
(11)
設(shè)計(jì)基于模型的反饋線性化(Feedback Linearization,FL)控制器如下:
(12)
代入式(11)中可得:
(13)
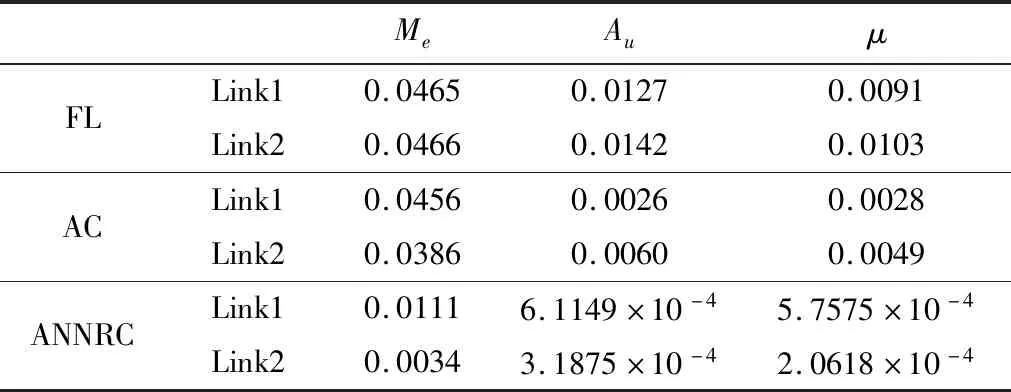
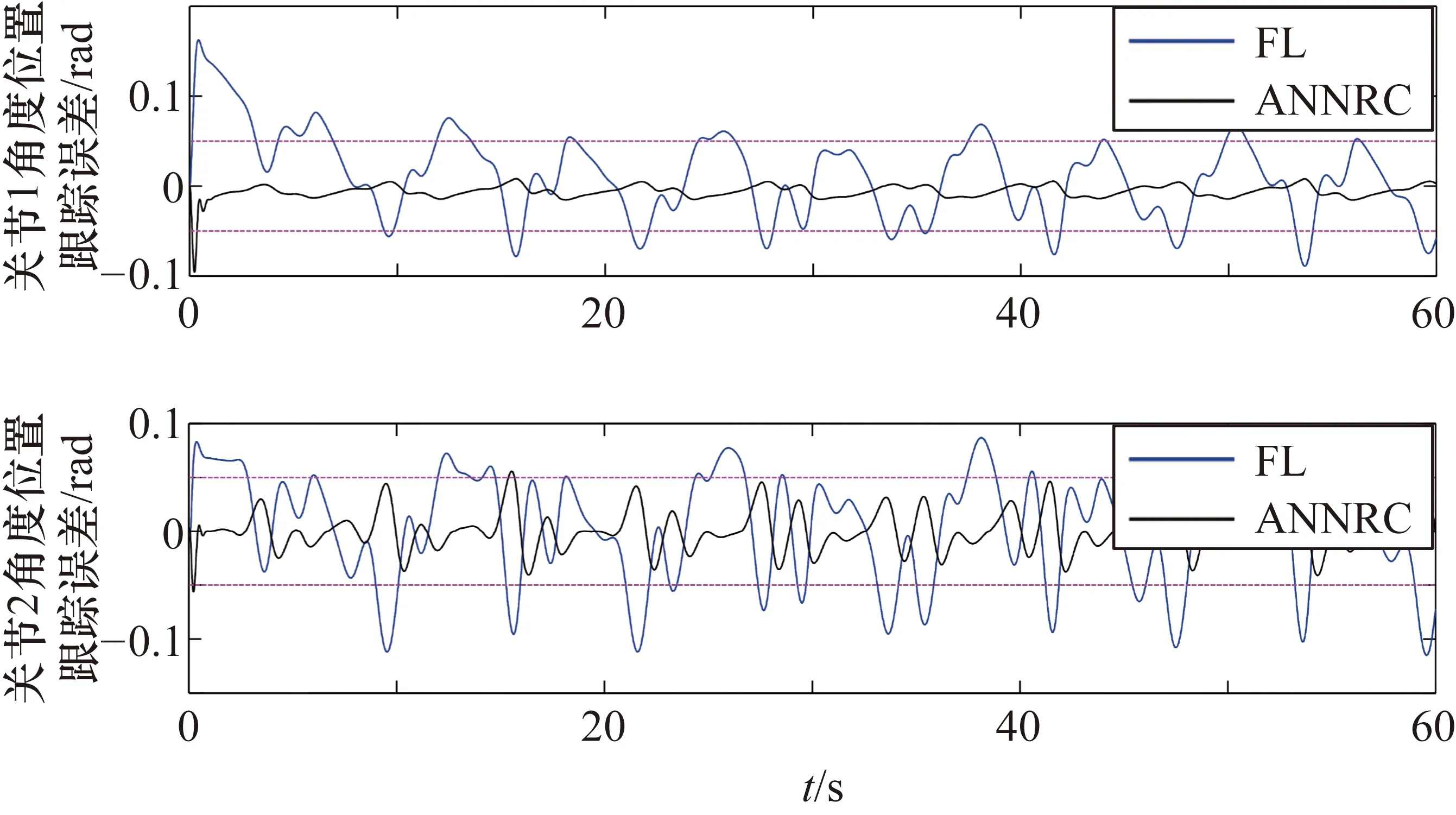
式中,K2為正對(duì)角矩陣。?t>0,誤差信號(hào)e1保持在-bi 由于模型參數(shù)和擾動(dòng)未知,用一個(gè)前饋神經(jīng)網(wǎng)絡(luò)來(lái)近似這些不確定項(xiàng),設(shè)計(jì)自適應(yīng)神經(jīng)網(wǎng)絡(luò)魯棒控制器如下: (14) 式中,ur為一個(gè)魯棒項(xiàng),用于減小神經(jīng)網(wǎng)絡(luò)的重構(gòu)誤差和未知擾動(dòng)對(duì)系統(tǒng)性能的影響,后面會(huì)對(duì)它進(jìn)行設(shè)計(jì)。 (15) (16) (17) 設(shè)計(jì)神經(jīng)網(wǎng)絡(luò)的權(quán)值自適應(yīng)律: (18) (19) γW,γV為給定的正常數(shù),設(shè)計(jì)ur: (20) (21) (22) 定義李雅普洛夫函數(shù): (23) 對(duì)李雅普諾夫函數(shù)求導(dǎo)得: (24) (25) 代入式(20)~式(22),并由引理4可得: (26) 由引理3和引理5可得: ≤-ρV3+C (27) 其中: (28) (29) 為了確保ρ>0,ki需要滿足min(ki)>0。 由式(27)可知,閉環(huán)系統(tǒng)的跟蹤誤差和神經(jīng)網(wǎng)絡(luò)的權(quán)值參數(shù)一致最終有界,并且可以通過(guò)調(diào)節(jié)設(shè)計(jì)參數(shù)使跟蹤誤差收斂到零附近的一個(gè)任意大小的領(lǐng)域內(nèi)。圖1為自適應(yīng)神經(jīng)網(wǎng)絡(luò)魯棒控制器的控制策略。 圖1 自適應(yīng)神經(jīng)網(wǎng)絡(luò)魯棒控制器控制策略 為了驗(yàn)證所提出控制器的有效性,以2自由度的機(jī)械臂為例進(jìn)行了模擬仿真實(shí)驗(yàn),其系統(tǒng)矩陣可以表示為 (30) (31) (32) 在所有仿真中,機(jī)械臂的期望跟蹤軌跡選擇為qd=[(1-e-0.5t)sin(0.5t),(1-e-0.5t)sin(0.5t)],仿真時(shí)間t∈[0,60],單位為s。機(jī)械臂系統(tǒng)參數(shù)為m1=5 kg,m2=2 kg,r1=0.5 m,r2=0.5 m,g=9.8。圖2為2自由度機(jī)械臂的模型示意圖。 圖2 2自由度機(jī)械臂模型示意圖 為了對(duì)比所設(shè)計(jì)的控制器的控制效果,在仿真中選擇反饋線性化(FL)控制器(式(12))和文獻(xiàn)[4]中使用的一種自適應(yīng)(AC)控制器與所設(shè)計(jì)的自適應(yīng)神經(jīng)網(wǎng)絡(luò)魯棒(ANNRC)控制器(式(14))做比較。分別對(duì)比了在有擾動(dòng)和無(wú)擾動(dòng)兩種情況下3種控制器的跟蹤性能。另外,通過(guò)改變位置初始條件和控制器增益大小,凸顯了約束控制器的優(yōu)越性能。 (1)對(duì)比3種控制器分別在有無(wú)擾動(dòng)時(shí)的跟蹤性能。 圖3和圖4為無(wú)擾動(dòng)時(shí)約束控制器在低增益下的仿真結(jié)果,圖5~圖8為有擾動(dòng)時(shí)約束控制器在低增益下的仿真結(jié)果。其中,圖8中縱坐標(biāo)f是式(15)中的系統(tǒng)真值,fn是式(16)中的神經(jīng)網(wǎng)絡(luò)的估計(jì)值。表1為有擾動(dòng)時(shí)仿真數(shù)據(jù)的性能指標(biāo),Me表示誤差絕對(duì)值的最大值,Au表示平均值,μ表示標(biāo)準(zhǔn)差。 圖3 無(wú)擾動(dòng)時(shí)約束控制器在低增益下的跟蹤性能 圖4 無(wú)擾動(dòng)時(shí)約束控制器在低增益下的跟蹤誤差 圖5 有擾動(dòng)時(shí)約束控制器在低增益下的跟蹤性能 圖6 有擾動(dòng)時(shí)約束控制器在低增益下的跟蹤誤差 圖8 神經(jīng)網(wǎng)絡(luò)的估計(jì) 表1 有擾動(dòng)時(shí)約束控制器在低增益下的性能指標(biāo) 單位:rad 結(jié)論:① ANNRC無(wú)論是在有擾動(dòng)時(shí)還是無(wú)擾動(dòng)時(shí),它的跟蹤性能和收斂速度都要遠(yuǎn)遠(yuǎn)優(yōu)于FL和AC,這得益于所引入的前饋神經(jīng)網(wǎng)絡(luò)和約束控制;② 相比于AC,ANNRC對(duì)時(shí)變擾動(dòng)依然能有很好的處理能力;③ 相比于FL和AC,ANNRC的控制律更為光滑。 (2)測(cè)試控制器增益和初始條件對(duì)系統(tǒng)約束的影響。 圖9、圖10分別為有擾動(dòng)時(shí)無(wú)約束控制器在低增益下和高增益下的仿真結(jié)果;圖11為位置初始條件e1(0)=0.15時(shí),約束控制器在低增益有擾動(dòng)時(shí)的仿真結(jié)果。 圖9 有擾動(dòng)時(shí)無(wú)約束控制器在低增益下的跟蹤誤差 圖10 有擾動(dòng)時(shí)無(wú)約束控制器在高增益下的跟蹤誤差 圖11 e1(0)=0.15時(shí),約束控制器的位置輸出誤差對(duì)比 結(jié)論:① 無(wú)約束時(shí)控制器明顯產(chǎn)生了違規(guī)輸出,且跟蹤性能下降;② 增大增益時(shí),無(wú)約束控制器的跟蹤性能有所改善,但是跟蹤性能還不如約束控制器在低增益下的表現(xiàn);③ 在給定初始條件e1(0)=0.15時(shí),約束控制器ANNRC的收斂速度明顯快于AC,表明所設(shè)計(jì)的約束控制器在初始條件不在給定約束范圍之內(nèi)時(shí),依然有很好的適應(yīng)能力。 以反步控制理論為基礎(chǔ),引入障礙李雅普諾夫函數(shù)實(shí)現(xiàn)輸出約束,介紹了一種自適應(yīng)神經(jīng)網(wǎng)絡(luò)魯棒控制器,利用神經(jīng)網(wǎng)絡(luò)在線估計(jì)機(jī)械臂系統(tǒng)的動(dòng)力學(xué)模型,并引入魯棒項(xiàng)減小了神經(jīng)網(wǎng)絡(luò)的重構(gòu)誤差。仿真結(jié)果表明所設(shè)計(jì)的控制器具有極強(qiáng)的抗干擾能力,不僅提高了機(jī)械臂的控制精度,而且在低增益和初始誤差較大的情況下,依然能保持極快的收斂速度。2.2 基于多層前饋神經(jīng)網(wǎng)絡(luò)的控制器設(shè)計(jì)



2.3 穩(wěn)定性證明


3 仿真研究









4 結(jié)束語(yǔ)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
電腦報(bào)(2019年40期)2019-09-10 07:22:44
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45