自動駕駛汽車乘員個性化乘坐舒適性辨識方法*
2021-08-31 03:20:46蘭鳳崇李詩成陳吉清沈宗卯
汽車工程 2021年8期
蘭鳳崇,李詩成,陳吉清,沈宗卯
(1.華南理工大學機械與汽車工程學院,廣州510640;2.廣州小鵬自動駕駛科技有限公司,廣州510640)
前言
自動駕駛汽車是集環境感知、智能規劃決策、跟蹤控制等為一體的復雜系統[1-2]。隨著車輛智能化程度不斷提高,車輛環境感知傳感器識別精度不斷提升,離自動駕駛的終極目標越來越近,若把環境識別當成人的眼睛,智能規劃決策則是人的大腦,如何規劃既滿足安全舒適又滿足個性化需求的軌跡,是目前亟需解決的問題。
自動駕駛車輛的路徑規劃/軌跡規劃方法主要有線插值方法、采樣方法、機器學習方法和最優控制方法等[3-7],這些軌跡規劃方法根據環境感知信息和車輛自身狀態判斷車輛所處的場景,根據不同的駕駛場景構建安全無碰撞行駛軌跡,其約束條件主要為軌跡曲率、與其他交通車安全距離、通行時間和加速度等,規劃的軌跡需滿足車輛的安全性、舒適性和通行效率等要求。部分學者以規劃過程中加速度變化率來表征車輛乘坐舒適性,以此來構造兼顧舒適性和安全性的最優控制軌跡規劃算法[8-9],但是此方法缺乏對乘員個性化需求的考慮。多樣化的規劃和控制方法帶來了不同的自動駕駛汽車乘坐體驗,為滿足個性化駕駛要求,一些研究從駕駛員駕駛習性入手,對駕駛風格進行聚類分析,以安全約束和駕駛風格為條件,搭建考慮駕駛風格的自動駕駛汽車換道軌跡規劃算法[10-12]。隨著駕駛員逐步被替代,自動駕駛汽車的個性化和多樣性最終將面向乘員,傳統的平順性評價方法更注重不同路譜和乘員座位材料等因素在振動下對乘員舒適性的影響[13-14],但此種評價存在滯后,無法實時對自動駕駛汽車規劃和控制質量做出全面的評價。故須搭建評價自動駕駛汽車軌跡規劃乘員舒適性的算法,辨識行駛參數與乘員舒適性的關系,為考慮乘員個性化舒適性軌跡規劃算法的搭建做鋪墊。
1 乘員乘坐舒適性辨識方法
1.1 乘員乘坐舒適性評價
車輛自動駕駛是橫縱向規劃控制耦合的過程,控制參數直接影響乘員乘坐舒適性,不同乘員對于振動的反應不同,評價指標主要包括轉向修正時主車橫擺特性、轉向修正中車輛側傾表現、轉向修正末期車輛橫擺收斂、轉向修正(頻繁)超調現象、轉向盤擺振現象、系統轉向修正強度、縱向加速度柔和度等,可以通過主觀感覺和客觀測量兩個方面評價。
1.1.1 主觀感覺評價
對比SAE主觀評價標準[15],根據自動駕駛規劃控制系統的差異,按行駛過程分階段對舒適性進行評價,以換道過程為例對初始、中間和結束3個階段與換道整體舒適性進行評價打分,制定乘員主觀感受評價方式,見表1。

表1 駕駛員駕駛主觀舒適性評價方法
1.1.2 客觀時域頻域評價
標準ISO2631—1:1997根據座椅支撐面xs、ys、zs三方向振動時域和頻域加權均方根評判乘員乘坐舒適性。
(1)頻域加權
對各向加速度時間歷程a(t)進行頻譜分析得到功率譜密度函數Ga(f),頻譜離散值為式中N為傅里葉變換點數,則


式中Fs為采樣頻率。
進而各軸加權均方根為

式中ω(f)為加權函數,其在xs、ys方向為wd(f),在zs方向為wk(f),在0.5~80 Hz頻率范圍有
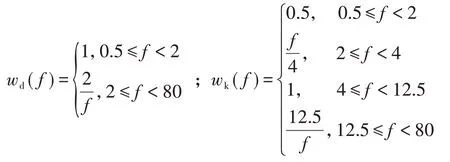
總的加權加速度均方根值為

式中ki為各方向加權系數,在xs、ys方向為1.4,在zs方向為1。
(2)時域加權
規劃評價往往持續時間較短,采樣點較少,存在頻域分析的頻譜估計誤差和噪聲較大的問題,為確保客觀舒適性數據的準確性,對此加速度進行時域分析。
當峰值系數aw(t)的峰值與aw的比值大于9時,認為車輛舒適性較差;當其小于9時,設計頻率加權濾波器獲取加權加速度時間歷程aw(t),對采集的a(t)進行加權濾波,基于IIR無限長沖激響應濾波器理論[16-17],得到加權加速度時間歷程aw(t),再對各軸aw(t)進行積分得到均方根值:

1.2 考慮乘員舒適性的軌跡規劃辨識方法
自動駕駛規劃控制參數最后作用于車輛輸出行駛參數,當前軌跡規劃過程主要考慮橫縱向位置和加速度指標,忽略了垂向加速度和不同乘員在不同軌跡規劃控制下的乘坐感受。為了滿足自動駕駛車輛乘員乘坐舒適性,提出一種考慮乘員舒適性的軌跡規劃方案(見圖1),綜合考慮乘員主客觀舒適性評價指標、軌跡規劃車輛狀態參數、操作參數和環境場景參數,搭建系統規劃控制參數和乘員舒適性的辨識模型,進而生成滿足不同乘員個性化乘坐需求的最優軌跡。
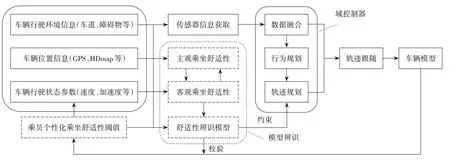
圖1 考慮乘員舒適性的軌跡規劃辨識方案
2 舒適性評價數據采集
2.1 數據采集平臺和參數標定
2.1.1 數據采集平臺搭建
為了采集自然駕駛過程中車輛行駛狀態舒適性評價參數,搭建了實車試驗參數采集平臺,如圖2所示。
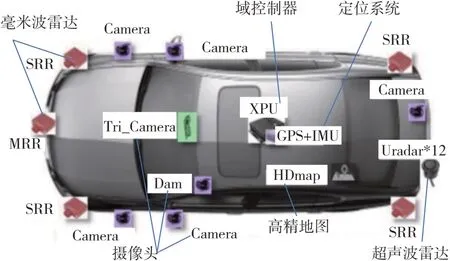
圖2 數據采集平臺
通過攝像頭識別分類環境目標、毫米波雷達獲取周圍目標運動和位置信息、定位系統和高精地圖獲取自動駕駛車輛當前位置和運動等信息,域控制器接收并處理傳感器信息,并傳入下層決策控制模塊;此外數采系統包括CANape、NOVATEL、Linux工控機、數據處理電腦等設備,可采集車輛位置信息、轉向盤轉角、電門、制動踏板、車速,縱向和側向加速度,橫擺、側傾、俯仰角加速度等車輛行駛狀態信息。
2.1.2 舒適性采集參數標定
高級別自動駕駛主要采用視覺和激光雷達+高精地圖方案,根據車道線和行駛環境生成參考行駛軌跡,基于局部環境信息生成一條車道保持或換道超車的局部規劃行駛軌跡,自動駕駛系統對車輛速度和跟車距離進行控制,使車輛保持車道行駛。當遇到前方慢車或車輛行駛路徑與車道功能不匹配時,車輛執行換道超車動作,不同乘員對于車輛的駕駛風格和乘坐舒適度要求不同。
自動駕駛系統主要操控電門、制動踏板和轉向盤,對應輸出為橫縱向行駛參數。基于車輛平臺通信架構,對車輛輸入和輸出參數進行標定和校正。
對電門踏板、制動踏板行程(mm)、俯仰角((°))和縱向加速度(m/s2)進行標定;其中電門踏板為電門行程占電門總行程的百分比,又稱電門開度(如20%)。分析各參數變化規律,將電門踏板開度縮小10倍,制動踏板行程縮小5倍并取反,進行類歸一化得圖3。
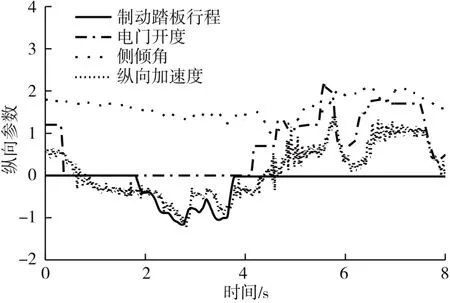
圖3 縱向參數標定
對轉向盤轉角((°))、橫擺角加速度((°)/s)、側傾角((°))和側向加速度(m/s2)進行標定;將轉向盤轉角縮小10倍,橫擺角加速度縮小3倍并取反,進行類歸一化得圖4。
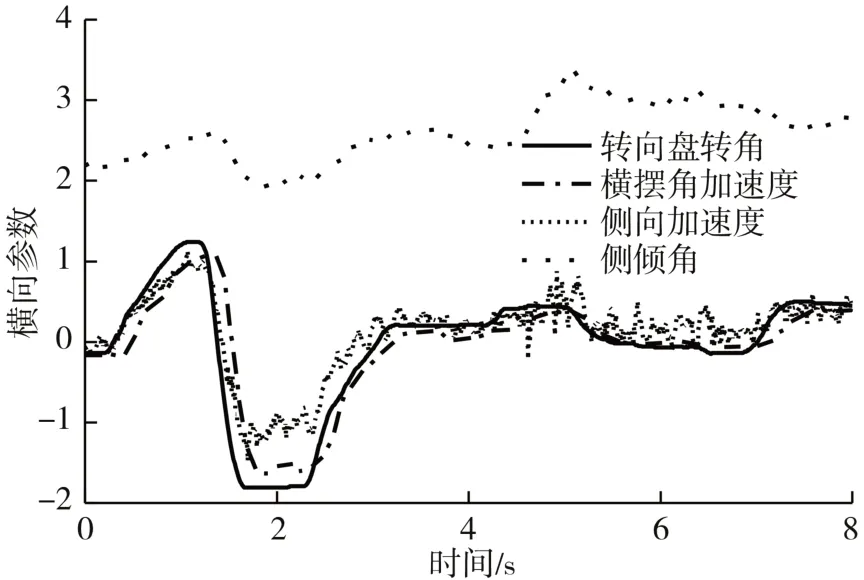
圖4 橫向參數標定
電門踏板開度、制動踏板行程、俯仰角與縱向加速度正相關,轉向盤轉角、橫擺角加速度、側傾角與側向加速度正相關,加速度響應及時,滯后較小。
隨機選取10組加速度信號進行處理得到時頻域加權方均根,見表2。兩種方法的運算誤差較小,根據軌跡規劃中車輛操縱穩定性對舒適性影響[18]和舒適性參數采集標定車輛參數變化規律,采用側向車輛加速度變化率、三軸向加速度大小等過程特征參數來評價乘員舒適性。

表2 頻域時域加速度加權均方根
2.2 舒適性影響參數采集
2.2.1 舒適性數據采集
道路激勵和駕駛員或自動駕駛系統的操作均影響乘坐舒適性,換道超車基于車道保持實現不同車道的切換,是乘坐舒適性評價的典型場景,故以換道超車對舒適性影響參數進行采集。
招募5年無事故的駕駛員,采集車配備記錄員和乘員。在高速公路高精度地圖下,設置導航到目的地,數采設備開始記錄數據,基于導航指引沿高速公路行駛,當駕駛員換道超車時,記錄換道時間點和乘員主觀舒適性。為提升樣本的豐富性,1名乘員最少體驗5輛數據采集車,每輛車換道體驗不少于15次。自然駕駛數據包含車輛位置(經度、緯度和高度),縱向、側向、垂向加速度,轉向盤轉角,轉向盤轉角速度,橫擺角速度,橫縱向車速,制動主缸壓力,電門開度,質心側偏角,航向角,俯仰角,側傾角,換道時與前車的相對距離,相對速度等數據,乘員主觀舒適度和座椅支撐面三軸向加速度等。例如,加速度、換道時車速與前車距離的變化如圖5和圖6所示。
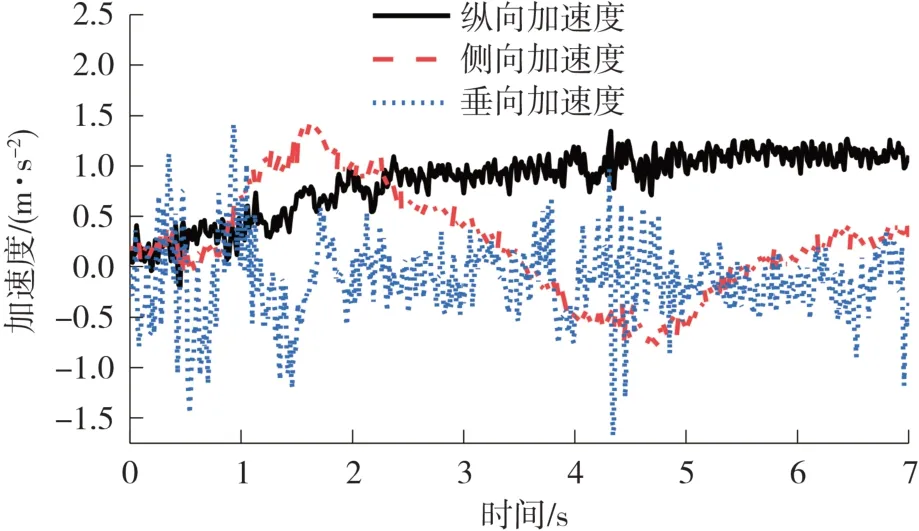
圖5 橫縱向和垂向加速度
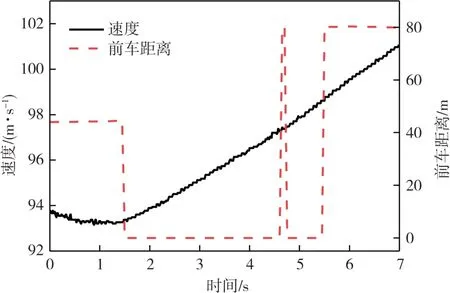
圖6 換道速度與前車距離
2.2.2 換道評價數據獲取
以記錄時間點切割前后10 s數據(見圖7),基于轉向盤轉角和位置變化信息確定車輛換道過程初始和結束時間點。
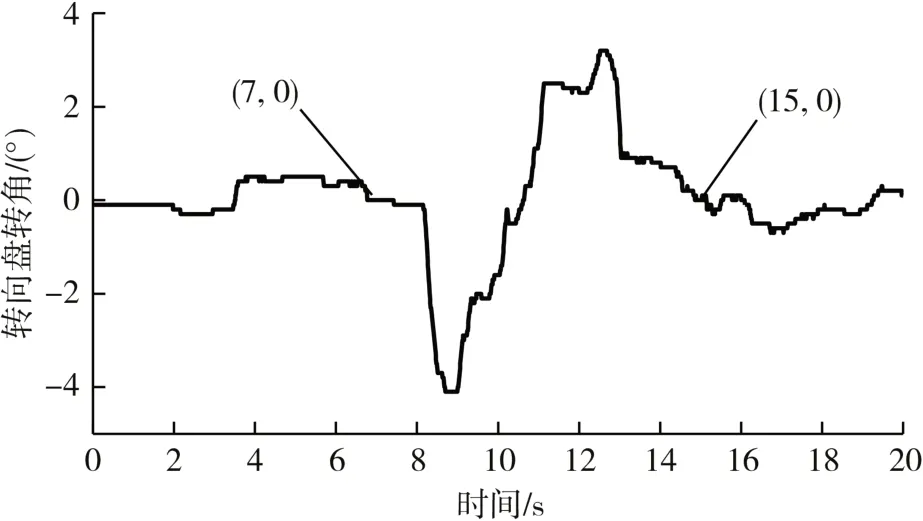
圖7 轉向盤轉角變化信息
利用經緯度計算車輛位置變化,先將LLA坐標(lon,lat,alt)轉化為ECEF下的地心坐標(X,Y,Z)
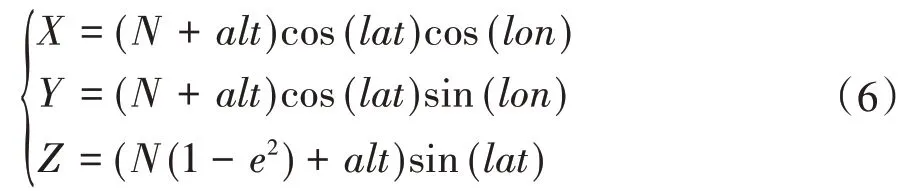
其中:e=
式中:a、b分別為地球長短半徑,取值6 378 160和635 677 m;e為第一偏心率;N為橢球體的曲率半徑。
以換道起點ECEF坐標為原點(X0,Y0,Z0),LLA坐標原點為(lon0,lat0,alt0),計算得到換道軌跡ENU坐標,以換道原點車頭航向(θ)為X1軸正方向進行坐標轉換,得到換道局部軌跡坐標(X1,Y1,Z1):
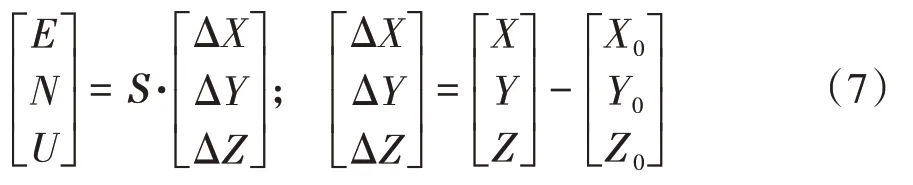
式中S為ECEF坐標到ENU坐標系的坐標變換矩陣:
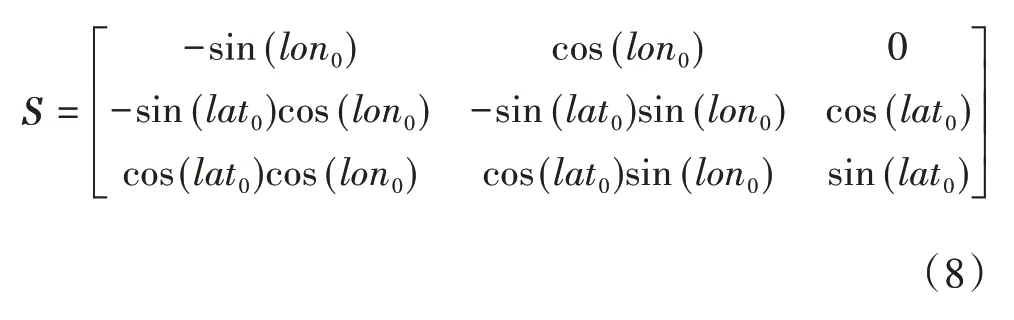
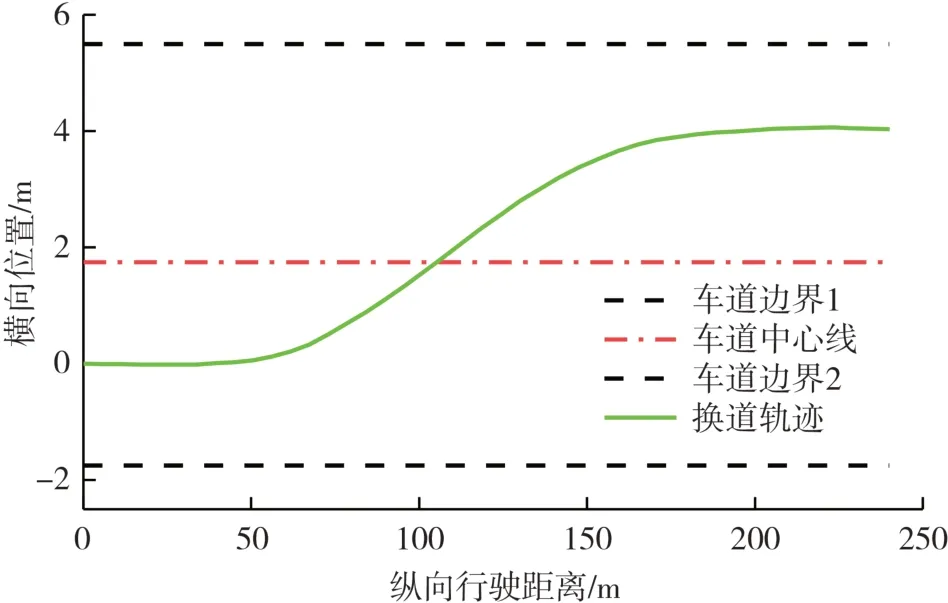
圖8 車輛換道軌跡
2.2.3 換道舒適性參數提取
對換道初始、中間和結束過程分數取均值,得到最不舒適階段和整體舒適度評價情況,乘員舒適性主客觀參數包括換道整體舒適度分數、換道過程舒適度分數均值、換道過程最不舒適最大值、換道時域和頻域加權方均根共5個參數。
為辨識自動駕駛汽車軌跡規劃約束參數與舒適性參數的關系,隨機獲取300組數據。基于標定數據相關性分析對參數進行降維,以換道側向加速度代表側向輸入輸出指標(轉向盤轉角、橫擺角加速度、側傾角);以縱向加速度代表縱向輸入輸出指標(電門踏板開度、制動踏板行程、俯仰角)。為了充分反映過程參數變化特征,橫、縱、垂向參數取最大值、均值,其中橫向加速度變化加入標準差,最終得到參數如表3。
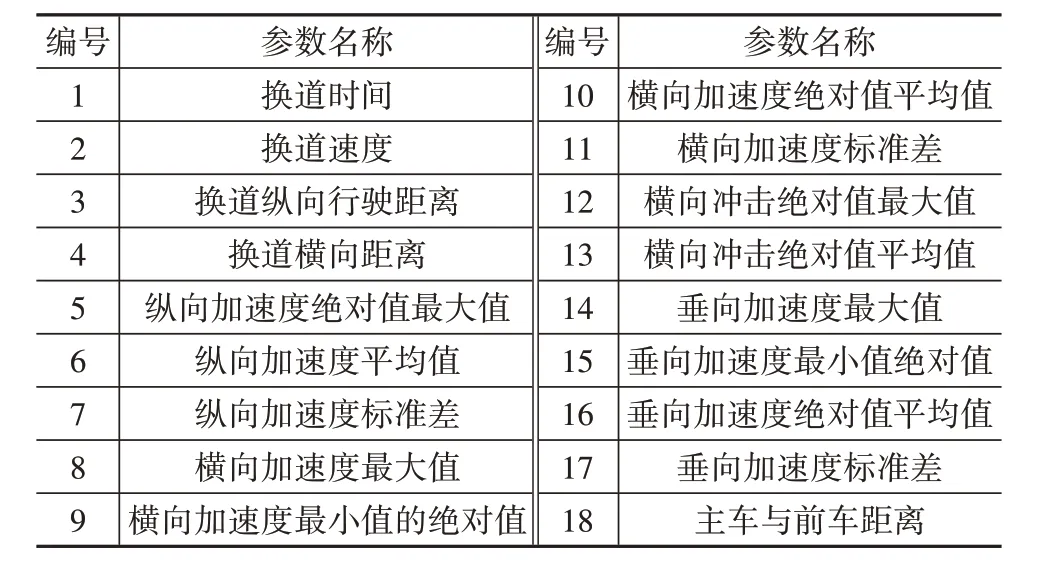
表3 換道過程參數
3 乘員舒適性綜合評價方法
3.1 舒適性參數特征提取
根據行駛參數相關性,提取換道過程參數特征。設有p個原始變量xi(i=1,2,…,p)相關或者獨立,將xi標準化得到zi為

式中:Fj(j=1,2,…,m)為公因子;εi為特殊因子;系數aij為因子載荷。
歸一化原始行駛參數并求得各個參數之間的相關系數:
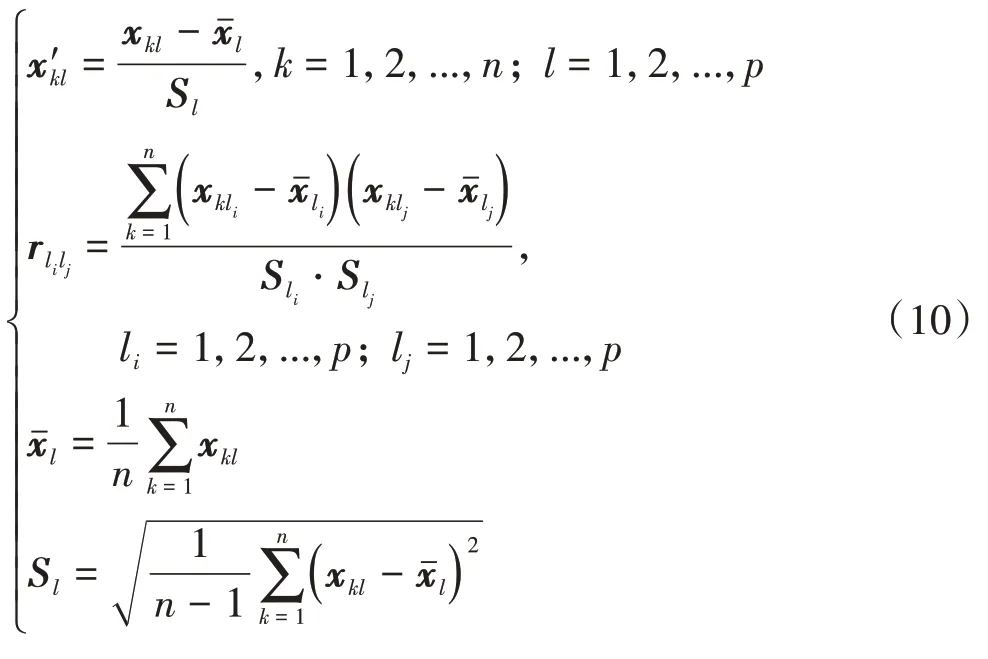
式中:n為樣本總數;xkl、x′kl為原始行車數據和標準化數據;rlilj為相關系數。
對車輛行駛參數KMO進行檢驗,結果見表4,其中,KMO值為0.756 1,接近1;Bartlett檢驗的卡方統計值較大,相伴概率為0.00,小于0.005,適合因子分析。
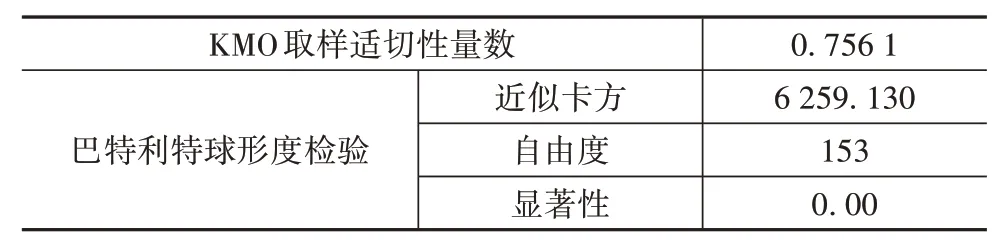
表4 KMO和巴特利特檢驗
在原始特征參數相關系數矩陣rlilj的基礎上,利用標準特征方程|λI-R|=0,得到相關系數矩陣的特征根λ(定義λ1≥λ2≥···≥λ18>0)和特征向量eig,且得載荷矩陣A:
式中ω為標準化特征向量。
利用特征根占比得到公共因子的方差貢獻率(vari)和累積方差貢獻率(VARi),見表5,前5個特征根大于1的公因子方差累積貢獻達80.6%,包含原始特征參數的大部分信息。
因子載荷矩陣各因子載荷系數差異較小,無法對因子命名,借助最大方差法旋轉因子載荷矩陣得到因子載荷旋轉矩陣RA,見表6,參數8-13為公因子1,主要為橫向加速度的過程特征參數,故稱為橫向沖擊因子;參數14-17為公因子2,主要為行駛過程垂向振動過程參數,稱為垂向振動因子;參數5-7為公因子3,主要為縱向運動的過程參數,稱為縱向加速因子;參數2、3和18為公因子4,主要和行駛過程的安全有關,稱為風險因子;參數1、4為公因子5,主要影響換道行駛效率,稱為效率因子。
公因子確定后,計算因子得分,忽略特殊因子ε,則因子得分系數和得分為
式中:SCi為公因子得分系數;Scorei為公因子得分。
3.2 舒適性客觀參數與行駛參數辨識
3.2.1 因子加權和非線性加權模型辨識
對影響舒適性的5個公因子得分進行加權,并旋轉因子貢獻率,換道得分與舒適性加權方均根的關系見表7。
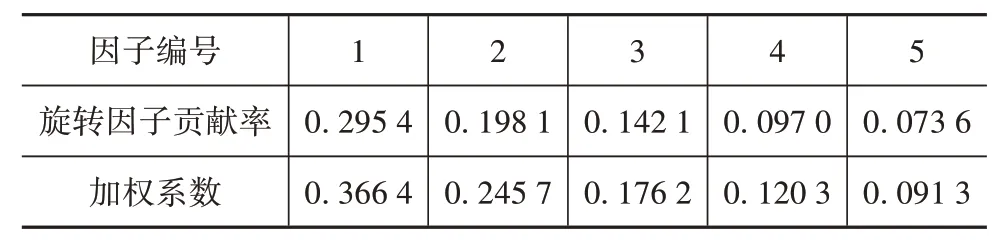
表7 貢獻率和加權系數
從表7加權系數可得,行駛參數中,橫向、縱向、垂向因子對乘員舒適性影響大于行駛風險和效率因子,將因子得分加權排序后與對應舒適性加權均方根均值得分見圖9,對因子分析得分Tscore和加權均方根aw的相關性進行分析得rTa=0.73,因子貢獻率加權相關性達73%,但不滿足建立車輛行駛參數與舒適性客觀指標的要求。
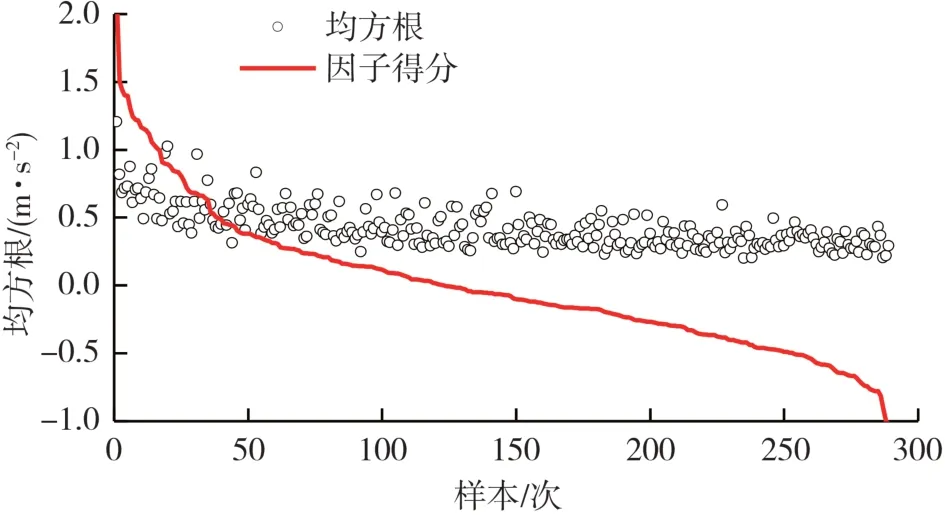
圖9 Tscore和aw得分
為了辨識車輛行駛參數與乘員舒適性客觀參數(舒適性加權均方根)的關系,基于因子貢獻加權的思想,對因子得分進行非線性擬合:

式中k為多元非線性擬合加權數,得到的回歸系數估計值和Scorei加權比例見表8。
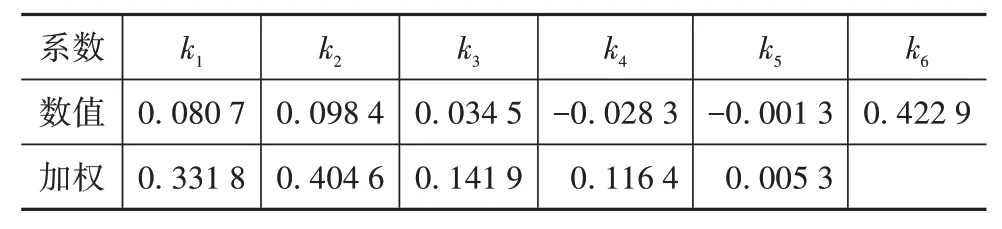
表8 非線性擬合回歸系數估計值
多元非線性加權ap和aw的相關性rpw=0.871(見圖10),擬合誤差均值為0.057,大于0.05,且存在誤差較大的點,無法辨識乘員舒適性。
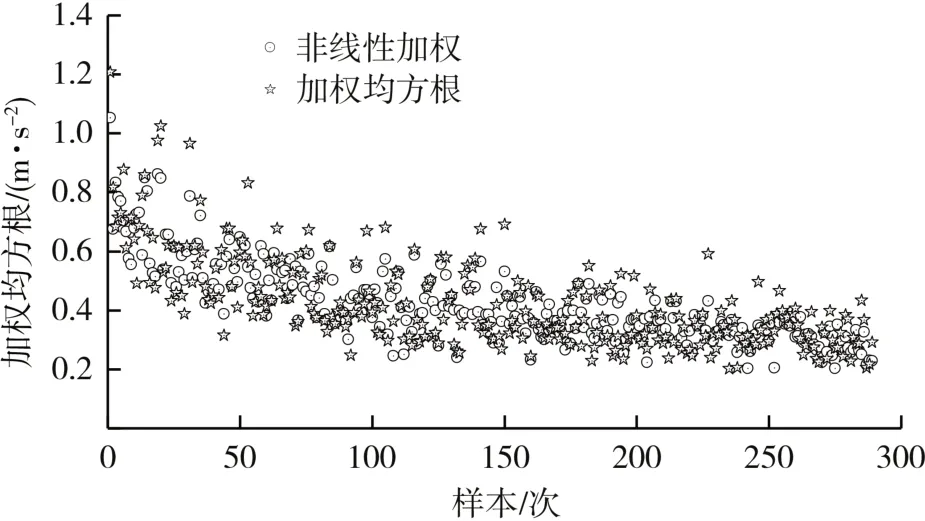
圖10 多元非線性加權ap和aw
3.2.2 BP神經網絡加權模型辨識
利用神經網絡分布式并行信息處理,調整內部相互連接的關系,最大程度還原參數基本特征。
選取最速下降L?M算法為訓練函數,設置兩個隱含層。第1層激活函數選用雙極S形函數、隱含層第2層和輸出層為線性函數、訓練誤差為10-7、學習率為0.01、訓練迭代次數為500次。為使訓練函數快速收斂和選取最優化訓練參數,結合最優粒子群算法原理,以隱含層節點數為自變量,輸出anet和aw相關性為目標,尋求最優參數。最終確定隱含層第1層為5個節點,第2層為6個節點。
神經網絡輸出anet和aw相關性為0.939(見圖11),誤差均值為0.003。非線性加權誤差與神經網絡加權誤差對比見圖12,神經網絡加權誤差遠小于非線性加權誤差,既神經網絡加權的準確率高,且樣本可以隨時擴充,魯棒性強。
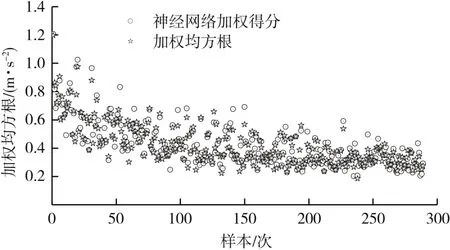
圖11 神經網絡輸出anet和aw
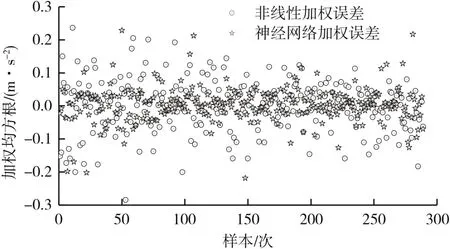
圖12 多元非線性加權與神經網絡加權誤差
3.3 基于乘員閉環的個性化舒適性評價
傳統乘員舒適性評價方法通過加速度均方根的閾值范圍來評價,不能夠定量定性對不同乘員的個性化舒適性進行評價。為了定量定性地研究乘員個性化乘坐舒適性,基于辨識模型估計乘員乘坐個性化舒適性,對92組乘員主觀舒適度參數(換道整體舒適度分數、換道過程舒適度分數均值、換道過程最不舒適最大值)進行分析,見圖13。其中,換道得分as1在2-8(分數越高舒適性越好)分之間,對分數進行等比例縮放得到as1=-as+0.95(分數越高舒適性越差),對as1和aw的相關性進行分析得rsw=0.858,主觀舒適度和客觀舒適度的相關性很高,能夠辨識主客觀舒適度關系。
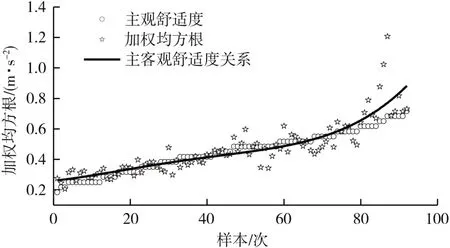
圖13 換道得分as1和aw
為了匹配不同乘員的個性化需求,降低主觀統計的主觀因素和噪聲,基于卡爾曼濾波對不同乘員舒適性和個性化乘坐體驗進行辨識,尋求不同乘員不同乘坐體驗下舒適性加權參數閾值,基于系統的過程模型,對上一狀態預測有
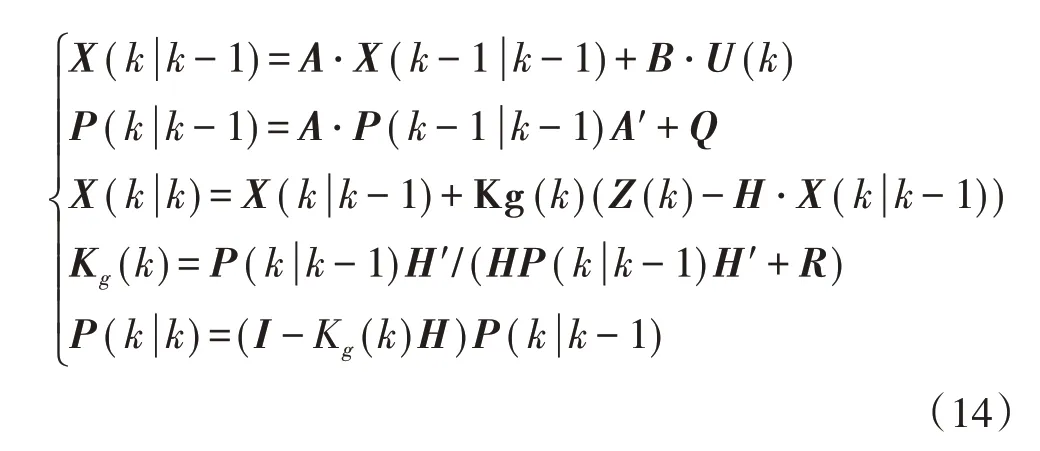
式中:X(k)為k時刻的系統狀態;U(k)為k時刻對系統的控制量,由于舒適性測量值沒有控制輸入,U為0;A和B為系統參數,對于單變量系統,A和B均為1;Z(k)為k時刻的測量值;H為測量系統的參數(等于1);Q和R分別為高斯白噪聲的協方差;X(k|k-1)為利用上一狀態預測的結果;X(k-1|k-1)為上一狀態最優的結果;P(k|k-1)為X(k|k-1)對應的協方差;P(k-1|k-1)為X(k-1|k-1)對應的協方差;X(k|k)為現在狀態k的最優化估算值;Kg為卡爾曼增益;P(k|k)為k狀態下X(k|k)的協方差。
乘員舒適性和乘坐體驗需求分為保守、平穩、激進風格,不同風格對于不同乘坐體驗的舒適性約束閾值不同,基于卡爾曼濾波對某乘員平穩乘坐需求進行分析。其中輸入參數為乘員體驗主觀平穩舒適評分所對應的舒適性加權均值,故卡爾曼濾波參數為:測量值Z(k)(舒適度加權均值);Q為0;R為0.1(加權函數誤差);初始狀態協方差P(1)為0.1;X(1)為乘員體驗平穩舒適的多次客觀舒適性加權均值。
從某乘員舒適性體驗中評價為舒適且平穩的30組數據中,客觀舒適性加權均值X(1)為0.313 3;隨機抽取15組進行運算,15次運算后結果為0.312 2(見圖14),誤差小于0.001。
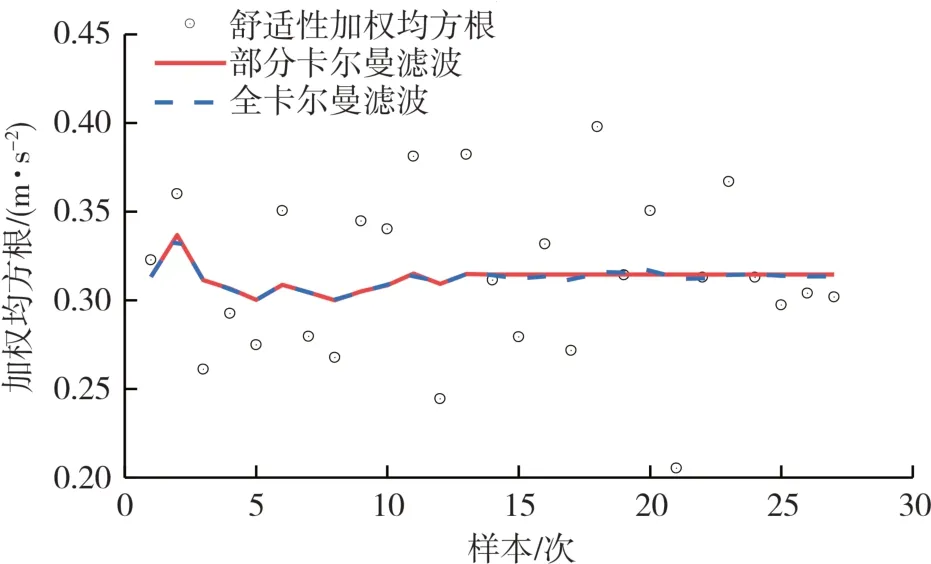
圖14 卡爾曼濾波乘員舒適性識別
因此神經網絡模型能夠準確辨識行駛參數和乘員客觀舒適性的關系,利用卡爾曼濾波能夠快速對乘員的個性化需求進行識別。區別傳統舒適性方法,對不同乘員乘坐舒適性需求進行了定量定性的研究,能夠為考慮乘員舒適性的個性化軌跡規劃和個性化駕駛風格進行定制。
4 結論
(1)為了滿足自動駕駛系統對乘員乘坐個性化舒適性的需求,基于傳統乘員乘坐舒適性理論,對舒適性影響參數和軌跡規劃參數的關系進行分析,搭建了乘員閉環的個性化舒適性辨識理論體系。
(2)分析乘員乘坐舒適性理論,搭建自動駕駛系統數據和乘員舒適性采集平臺,采集得到18個車輛行駛特征參數和量化乘員主客觀舒適性參數。對行駛特征參數進行降維分析,得到橫向沖擊、縱向加速、垂向振動、行駛風險和行駛效率5個舒適性影響因子,利用因子加權、非線性加權和神經網絡加權算法和卡爾曼濾波對行駛參數和主客觀舒適性參數進行辨識,得到規劃行駛參數對乘員舒適性的辨識模型。
(3)辨識模型的乘員主客觀舒適度相關性高達85.8%;行駛參數中,橫向、縱向、垂向因子對乘員舒適性影響大于行駛風險和效率因子,且個性化乘員舒適性辨識率高達93.9%;可為搭建考慮乘員舒適性的個性化軌跡規劃控制算法提供理論依據。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
領導決策信息(2018年50期)2018-02-22 06:17:16
池州學院學報(2017年3期)2017-10-16 01:38:35
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
消費者報道(2016年3期)2016-02-28 19:07:32
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
汽車零部件(2014年6期)2014-09-20 06:24:48