基于分數階自適應滑模的船舶非線性減搖控制
2021-08-31 00:46:04方瓊林
中國艦船研究 2021年4期
方瓊林
集美大學 航海學院,福建 廈門 361021
1 引 言
船舶橫搖是指以船舶重心所在的前、后軸線(縱軸線)為中心的回轉搖晃,若幅度過大將嚴重影響船舶的適航性、適居性和安全性及其艦上設備的使用。此外,艦舶橫搖還會對艦艇的戰斗性能產生嚴重影響,若橫搖角超過某一個限值時會帶來船舶傾覆的危險。因此,安裝船舶減搖裝置是現代船舶設計的焦點之一,例如減搖水艙、舭龍骨和減搖鰭。目前,采用的減搖控制算法包括有神經網絡控制、預測控制、H∞控制等。
20 世紀50 年代前,蘇聯學者提出了滑模控制(SMC) 方法,其是變結構控制的一個分支,屬于非線性控制,通過切換函數來實現,根據系統狀態偏離滑模的程度切換控制律或控制器參數。近年來,滑模控制方法在船舶運動領域得到了較快發展。例如,Lavieri 等[1]采用滑模技術來減小小型船舶的橫搖運動;Moradi 等[2]針對船舶航行中影響減搖鰭系統的問題,采取了滑動模態控制;Ngo 等[3]為移動式港口起重機設計滑動面為期望的軌跡,針對滑模函數及其變化率,采用模糊邏輯調整滑模控制的增益抖動;Carletti 等[4-5]為減搖和航向保持問題設計了滑膜控制器,并介紹一種基于自適應神經網絡的海洋機動艇鰭片橫搖穩定滑模控制方法,采用徑向基函數神經網絡自適應學習系統的不確定性界,利用網絡輸出調整滑模控制增益;Fang 等[6]設計了一種由滑模控制器和視線導引技術,來研制自動駕駛儀系統;Koshkouei 等[7]設計了包括滾翼、滾舵和自動駕駛儀的船舶減搖滑模控制器;謝克峰[8]針對浮動平臺的搖擺實驗臺設計了積分滑模控制器;王世凱等[9]運用滑模控制方法設計了同步橫搖阻尼和航向保持控制器來調節一階波浪擾動;梁利華等[10]為減搖鰭設計了切換模糊化非線性自適應滑模控制(ASMC)器;劉文帥[11]設計了滑模反演控制器,通過操控減搖鰭運動來抵消干擾;沈曉[12]設計了反步滑模自適應控制器,并將其應用于舵鰭聯合減搖控制;胡建章等[13]充分考慮了不確定性干擾來設計欠驅動水面無人艇集群的自適應反步滑模控制器;劉志全等[14]提出帶有航速損失約束的自動舵控制系統,依據舵角協同控制方法設計了航向和舵減搖滑模控制律。
然而,滑模變結構控制仍存在因為不連續開關特性所引起的系統抖振等問題。例如,當系統運動到滑模面且靠近平衡點時具有一定速度,在慣性等因素的影響下滑模面的兩側會出現反復運動,產生諸如抖振這樣的負面效應。
誕生于1695 年的分數階微積分(fractional order calculus)方法是一個重要的數學分支,其可處理擾動問題且控制性能良好,具有較快響應速度、較低超調量、更寬控制參數范圍的特點。為此,趙蕊等[15]提出一種基于分數階PID 技術的航向控制器,結合遺傳算法完成了控制參數的自動整定,提高了控制器的實用性;Zhou 等[16]提出了一種基于深卷積神經網絡的分數階終端滑模控制策略,用于剛性機器人的跟蹤控制,并采用深度學習方法對系統的不確定性進行補償;Fei 等[17]提出的遞歸神經網絡分數階滑模控制方案結合了分數階控制方法和遞歸神經網絡結構;Modiri 等[18]采用具有分數階滑動面的終端滑模控制器,對2 個具有參數不確定性和外部干擾的分數階混沌系統狀態進行了同步;Han[19]將分數階滑模面與分數階非線性擾動觀測器結合,提出一種基于分數階指令濾波器的反推控制方法,引入基于分數階的命令濾波器。
鑒于分數階自適應滑模控制(FOASMC)算法已在其他領域獲得應用,但在國內外尚未有將分數階自適應滑模控制算法應用到船舶橫搖減搖領域的相關文獻報道,本文擬在減搖滑模控制中引入分數階算法,以便更好地降低橫搖角的均值和標準差,獲得更佳的減搖控制效果,從而進一步克服模型不確定性和外界環境擾動所導致的系統不確定性。
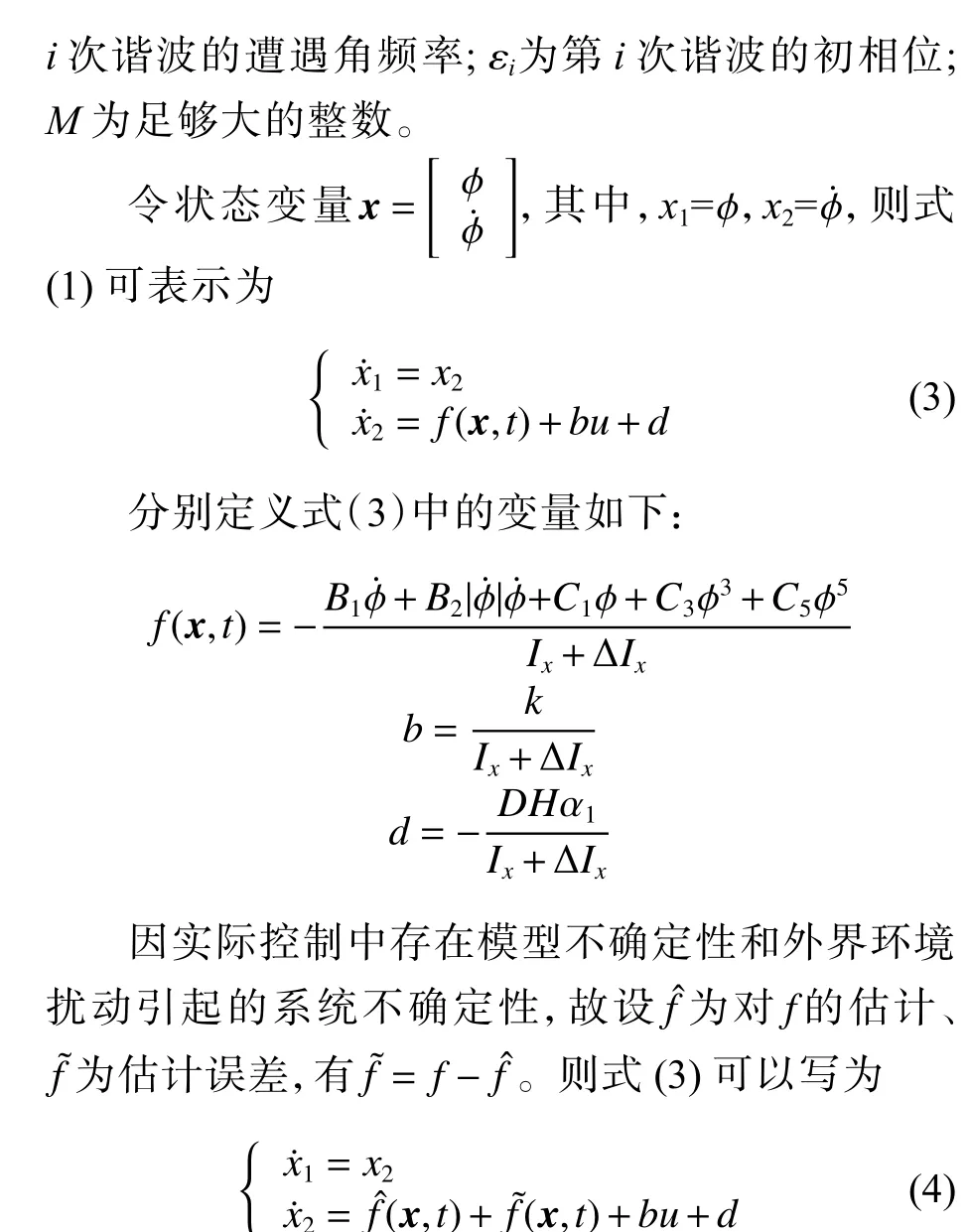
2 船舶非線性橫搖運動模型
本文以船舶質心為原點Ob,船舶前進方向為xb軸 ,橫蕩方向為yb軸,垂蕩方向為zb軸,建立船體的坐標系。如圖1 所示。圖中, φ為船舶橫搖角。

圖1 船舶橫搖模型Fig. 1 Ship rolling model
船舶非線性橫搖運動模型為[20]

3 分數階自適應滑模控制
3.1 分數階微積分
Caputo 形式的分數階微積分定義如下[21-22]:

3.2 分數階自適應滑模控制

式中,c為控制律增益,且滿足下式:

3.3 穩定性分析
定理:基于Lyapunov 穩定性理論,考慮船舶非線性橫搖系統運動學方程式(4)和基于分數階自適應滑模控制器式(8) 及自適應控制律式(9),則系統的橫搖角跟蹤誤差將漸進穩定。

為了防止造成抖振,采用如下飽和函數代替符號函數。

式中: Δ為邊界層參數; s at(h) 為h的飽和函數,其中h為任意實數。
4 實例與分析
4.1 實例介紹
為驗證基于分數階自適應滑模控制的算法在船舶橫搖中的控制效果,采用表1 所示主要參數[1]。

表1 船模參數Table 1 Parameters of ship model
4.2 閉環橫搖控制與比較
實驗測試采用Intel(R) Core(TM) i3-4150T CPU@ 3.00 GHz、內存4.00 GB 的64 位操作系統、基于x64 的處理器完成。圖2 為船速v=10 m/s、不同遭遇浪向角(μe)下海浪的Pierson-Moscowitz (PM)譜曲線,圖3 為遭遇浪向角70°時不同船速下海浪的P-M 譜曲線。

圖2 不同遭遇浪向角下海浪P-M 譜(v=10 m/s)Fig. 2 P-M spectrum of waves in different directions at v=10 m/s

圖3 不同船速下海浪P-M 譜( μe=70°)Fig. 3 P-M spectrum of waves at different ship speeds when μe=70°
圖4 為船速5 m/s、遭遇浪向角60°時開環控制與閉環控制時的橫搖角曲線。
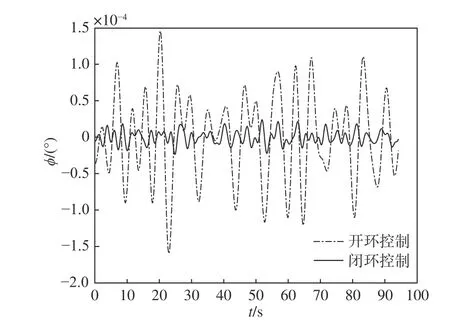
圖4 開環控制與閉環控制時的橫搖角曲線Fig. 4 Rolling angle curve of open-loop control and closed-loop control
參數設置如下: α=0.9,c=0.16,λ=1。圖5 為船速5 m/s、遭遇浪向角80°時的橫搖角滑模閉環控制曲線, 圖6 為船速5 m/s、遭遇浪向角90°時的橫搖角滑模閉環控制曲線,圖7 為船速5 m/s、遭遇浪向角100°時的橫搖角滑模閉環控制曲線。

圖5 橫搖角滑模閉環控制曲線(v=5 m/s, μe=80°)Fig. 5 Sliding mode closed loop control curve of rolling angle (v=5 m/s, μe=80°)

圖6 橫搖角滑模閉環控制曲線(v=5 m/s, μe=90°)Fig. 6 Sliding mode closed loop control curve of rolling angle (v=5 m/s, μe=90°)

圖7 橫搖角滑模閉環控制曲線(v=5 m/s, μe=100°)Fig. 7 Sliding mode closed loop control curve of rolling angle (v=5 m/s, μe=100°)
圖8 為船速10 m/s、遭遇浪向角80°時的橫搖角滑模閉環控制曲線,圖9 為船速10 m/s、遭遇浪向角90°時的橫搖角滑模閉環控制曲線,圖10 為船速10 m/s、遭遇浪向角100°時的橫搖角滑模閉環控制曲線。

圖8 橫搖角滑模閉環控制曲線(v=10 m/s, μe=80°)Fig. 8 Sliding mode closed loop control curve of rolling angle (v=10 m/s, μe=80°)

圖9 橫搖角滑模閉環控制曲線(v=10 m/s, μe=90°)Fig. 9 Sliding mode closed loop control curve of rolling angle (v=10 m/s, μe=90°)

圖10 橫搖角滑模閉環控制曲線(v=10 m/s, μe=100°)Fig. 10 Sliding mode closed loop control curve of rolling angle (v=10 m/s, μe=100°)
圖11 為本文所提分數階自適應滑模控制算法與基本滑模控制算法、自適應滑模控制算法計算結果的比較。
圖12 為本文所提分數階自適應滑模控制算法與基本滑模控制算法控制輸入的比較。由圖可見,本算法能減少控制輸入的抖振現象。

圖12 不同控制算法的控制輸入比較Fig. 12 Input comparison of of different control algorithms
圖13 所示為系統相空間控制曲線。由圖可見,系統被控后穩定在原點,相空間的軌跡是收縮的,逐漸趨近于原點,運動穩定,且對初始條件不敏感。

圖13 系統相空間控制曲線(v=5 m/s, μe= 120°)Fig. 13 System phase space control curve (v=5 m/s, μe= 120°)
綜合以上各圖可以看出,對于不同的船速、遭遇浪向角等情況,分數階自適應滑模控制均有更好的減搖控制效果。
為了驗證本文所提算法的有效性,將本文所提算法與基本滑模控制算法進行了比較。表2 給出了不同船速和遭遇浪向角下控制系統橫搖角的均 值 和 標 準 差。參 數 設 置 如 下:c=1, α=0.5,λ=1。表中數據均為計算20 次后的平均值,具有統計意義。其中,EFOASMC和 σFOASMC表示用分數階自適應滑模控制算法計算的橫搖角均值和方差,ESMC和 σSMC表示用基本滑模控制算法計算的橫搖角均值和方差,EOpen和 σOpen表示用開環控制算法計算的橫搖角均值和方差。

表2 不同算法計算結果比較Table 2 Result comparison of different control algorithms
由以上結果的比較可見,與基本滑模控制算法相比,在相同實例和運行條件下,分數階自適應滑模控制算法得到的橫搖角均值和標準差更小,控制效果更好,減搖控制結果令人滿意。
4.3 參數影響分析
為了了解各個主要參數對算法計算性能的影響,分別對分數階、控制律增益、滑模面增益等參數取不同的數值,分別比較其對控制效果的影響。
4.3.1 分數階的影響分析
對4.3 節所述運動情況,取c=1,λ =1,v=5 m/s,μe=90°,其他參數不變。不同分數階微分階數計算的橫搖角均值和方差如表3 所示。
由表3 可見:當分數階微分的階數較小時,橫搖角均值較小,即系統穩態誤差較小;當分數階積分的階數較大時,橫搖角標準差較小,即系統波動較小,與穩定期望值的偏離程度較小。
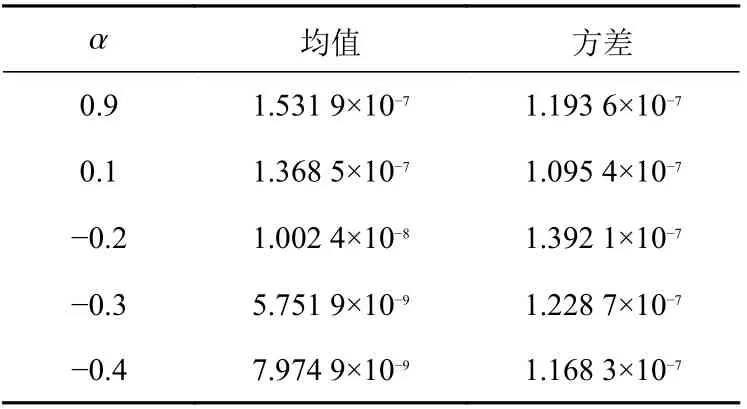
表3 不同分數階階數計算的結果比較Table 3 Result comparison of fractional orders
基于分數階滑模控制能使系統收斂。不同分數階下調節過程的性能有異,故可根據實際情況,選取不同分數階微積分算子,使系統滿足不同的動態和靜態,控制效果更好。因整數階微分是特例,整數階積分是分數階微積分的特例,故整數階微積分是分數階微積分的特例。分數階微積分參數選擇范圍更大、更靈活。
4.3.2 控制律增益影響分析
對 于4.3 節 所 述 運 動 情 況,取 α=0.5, λ=1,v=5 m/s, μe=90°,其他參數不變,不同控制律增益c情況下船舶橫搖角的均值和方差值見表4。

表4 不同控制律增益的計算結果比較Table 4 Result comparison of control law gains
由表4 可見:當c值較大時,橫搖角均值較小(系統穩態誤差較小)且橫搖角標準差較小(系統波動較小),與穩定期望值的偏離程度較小。
4.3.3 滑模面增益影響分析
對4.3 節所述運動情況,取 α=0.5,c=1,v=5 m/s, μe=90°,其他參數不變,不同滑模面增益λ 情況下的船舶橫搖角的均值和方差值見表5。

表5 不同滑模面增益計算的結果比較Table 5 Result comparison of sliding mode surface gains
由表5 可見:當λ 的值較小時,船舶橫搖角均值較小,即系統穩態誤差較小;而且橫搖角標準差較小,即系統波動較小,與穩定期望值的偏離程度較小。
5 結 語
本文針對船舶非線性橫搖運動控制問題,提出了一種分數階自適應滑模控制算法,證明了閉環系統的穩定性。對分數階微積分的階數、控制率增益和滑模面增益系數進行了比較,分析其對控制效果的影響。實驗結果證明,新算法在不同船速、遭遇浪向角的情況下,相對于基本滑模控制算法都有更好的減搖控制效果。與基本滑模控制算法相比,在相同的實例和運行條件下,分數階自適應滑模控制的橫搖角均值和標準差更小,控制效果更好。例如,當船速10 m/s、遭遇浪向角5°時,本文控制算法控制的橫搖角均值是基本滑模控制的25.89%,均方差是基本滑模控制的14.32%,減搖控制結果令人滿意。當分數階微分的階數較小時,橫搖角均值較小,即系統穩態誤差較小; 當分數階積分的階數較大時,橫搖角標準差較小,即系統波動較小,與穩定期望值的偏離程度較小; 控制率增益較大時,船舶橫搖角均值較小(即系統穩態誤差較小)且橫搖角標準差也較小(即系統波動較小),與穩定期望值的偏離程度較小; 當滑模面增益較小時,船舶橫搖角均值較小(即系統穩態誤差較小)且橫搖角標準差也較小,即系統波動較小,與穩定期望值的偏離程度較小。
下一步將繼續改進本控制算法,以進一步提高非線性橫搖運動的控制精度和魯棒性能。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年2期)2022-03-29 01:12:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
裝備制造技術(2019年12期)2019-12-25 03:06:46
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
