基于FPGA的夏克-哈特曼探測器實時波前處理機
2021-08-31 00:54:54劉召慶金偉其
紅外技術 2021年8期
劉召慶,李 力,,董 冰,金偉其
〈系統與設計〉
基于FPGA的夏克-哈特曼探測器實時波前處理機
劉召慶1,李 力1,2,董 冰2,金偉其2
(1. 西安應用光學研究所,陜西 西安 710065;2. 北京理工大學 光電學院,北京 100081)
夏克-哈特曼波前傳感器是目前自適應光學系統中應用最為廣泛的實時波前探測器。本文針對具有高分辨、高幀速、大規模子孔徑數的夏克-哈特曼傳感器,根據其波前處理計算量和實時性的要求,提出了一種基于現場可編程門陣列(FPGA,field-programmable gate array)的實時波前處理機結構及波前斜率計算方法。該方法利用核心處理模塊重復利用的方式完成子孔徑內光斑質心的計算,并通過USB3.0將處理后的質心數據實時傳輸給PC機。處理機以一片XILINX公司Kintex7-XC7K325T的FPGA作為處理芯片進行了設計,結果表明:該算法可對560幀/s的1020×1020圖像(580MB/s數據量),56×56子孔徑哈特曼傳感器,進行低延時實時光斑質心計算,提高了系統的波前處理速度和整個自適應光學系統的控制速度。
夏克-哈特曼探測器;實時波前處理機;FPGA
0 引言
自適應光學的基本思想是在光學系統中引入一個表面形狀可變的光學元件(波前校正器)和一個波前誤差傳感器,用波前傳感器測量出不斷變化的波前誤差,根據測量結果由控制系統控制波前校正器對波前誤差進行校正。如果這一過程足夠快,就可以用不斷變化的波前校正量來校正不斷變化的動態波前誤差。
夏克-哈特曼波前傳感器是目前自適應光學系統中應用最為廣泛的實時波前探測器。自適應光學系統將夏克-哈特曼波前傳感器所測到的波前畸變信息轉化成校正器的控制信號,以實現自適應光學系統的閉環控制。用于補償大氣湍流引入像差的天文自適應光學系統的空間分辨力和時間分辨力應分別與大氣相干長度和時間常數相匹配。優秀觀測站址的大氣相干長度0和時間常數分別約十幾厘米和幾毫秒,隨著望遠鏡口徑的增大,要求自適應光學系統有更多的子孔徑數。以直徑8m的望遠鏡為例,若0取15cm,則要求夏克-哈特曼傳感器在直徑方向上至少有53個子孔徑。由此給波前處理系統帶來的問題是計算量大、實時性要求高。為提高自適應光學系統的控制帶寬,必須提高自適應光學系統的波前采樣頻率和波前校正速度。在系統采樣頻率一定的情況下,波前處理系統的計算延時會直接影響系統的控制帶寬。在當前圖像幀結束的情況下,越早給出波前校正量越能更好地補償波前像差,實現準實時的波前校正。
2002年中科院光電所研制的2900Hz、61單元的波前處理機[1]共用17片DSP,計算延時為340ms;2011年中科院電子技術研究所研制的基于FPGA的22×22子孔徑波前斜率處理器[2]完成一幀所有子孔徑斜率計算的延遲時間為0.33ms;2015年中科院電子技術研究所研制的基于PC機的949個子孔徑的系統[3]進行2000 Hz的處理,處理延遲低于240ms;2016年中科院長春光機所研制的基于GPU的液晶自適應光學系統的波前處理[4]斜率延時為18ms,其相機像素為240×240,幀率2000幀/s,40×40個子孔徑。以上夏克-哈特曼傳感器所產生的圖像數據大致在每秒100M像素數左右,現代的FPGA都可以在單周期內完成波前斜率計算,因此只要FPGA運行在100MHz的時鐘頻率下都可以進行實時處理。面對自適應光學對傳感器分辨率、幀率要求的不斷提高,夏克-哈特曼傳感器所產生的圖像數據大致在500M/s以上的像素數,傳感器為達到傳輸帶寬的要求,都采用多通道(8~10通道)同時傳輸的方式,FPGA難以運行在如此高的時鐘頻率。
本文針對具有高分辨率(1020×1020),高幀速(560幀/s),大規模子孔徑數(56×56單元)的夏克-哈特曼傳感器,提出一種基于現場可編程門陣列(field-programmable gate array,FPGA)的實時波前處理機,在有效降低硬件資源的前提下,可在當前子孔徑數據進入FPGA后延遲10行完成當前子孔徑波前處理運算,提高了系統的波前處理速度。
1 夏克-哈特曼波前傳感器原理
夏克-哈特曼波前傳感器由微透鏡陣列和探測器組成,每個微透鏡對應探測器上的一個子探測區。當以參考波前(近似平面波)入射到微透鏡陣列時,在探測區域形成近似等間距排列的光斑陣列,此時記下光斑質心位置作為參考。當以畸變波前入射時,每個子透鏡對應的光斑質心位置相對參考光斑可能產生和兩個方向的移動,移動量即對應于畸變波前在子孔徑內的平均斜率。獲得畸變波前在子孔徑內的平均斜率后,通過波前重構算法(模式法或區域法)即可獲得波前相位。
圖1為夏克-哈特曼波前傳感器的工作原理。光波場被陣列透鏡分解成許多小孔徑光斑,這些小孔徑光斑匯聚到夏克-哈特曼探測器焦平面上。假定不同的子孔徑的光成像在探測器靶面的不同位置上,任意兩個子孔徑所產生的鄰近像點沒有重疊,這樣每個子孔徑在像平面上都對應的一塊專用的成像面積。進入陣列透鏡的光束在探測器上形成一陣列衍射光斑。

圖1 夏克-哈特曼波前傳感器結構
根據光斑質心的定義可寫出離散采樣情況下光斑質心的計算公式為:

式中:x和y分別為探測器各子孔徑位置坐標;I,j為第(,)個探測器像元灰度值。
在每一個子孔徑內進行光斑質心計算,可以得到參考波前質心(c0,c0)和畸變波前質心(c,c)。波前斜率g和g定義為信標光波在和方向的偏導數在該子孔徑上的平均,波前斜率和光斑質心變化量滿足如下關系:

式中:為探測器像元尺寸;為子透鏡焦距。
綜上所述,夏克-哈特曼波前傳感器波前處理的核心為子孔徑內光斑質心的計算。
2 基于FPGA的實時波前處理機結構
基于Kintex7-XC7K325T的FPGA實時波前處理機組成如圖2所示,夏克-哈特曼傳感器將實時采集的圖像數據發送給以FPGA為核心的自適應光學波前處理機,FPGA處理完后將數據發送給上位機,同時上位機可以發送控制指令對處理機的參數進行控制。

圖2 處理機系統組成
夏克-哈特曼傳感器的FPGA處理硬件結構如圖3所示。采用具有高幀速、大面陣CMOS探測器的EoSens CL型相機,在Camera Link Extended-Full傳輸模式下以1020×1020分辨率可實現560幀/s的幀率。為了傳輸高達4.4 Gbit/s的數據,需要3對Camera Link數據鏈,因此處理機數據接收端采用3片DS90CR288MTD芯片將Camera Link數據轉成LVCMOS信號傳輸給FPGA。
本夏克-哈特曼傳感器微透鏡整列數為56×56,每個子孔徑在和方向上用8bit表示整數坐標位置,16bit表示小數坐標位置,則每秒至少需要傳輸560×56×56×2×24=84295680bit數據,大大超過了通信常用的異步串行通信(RS232/422)的傳輸極限。因此在傳輸波前質心數據時,本文采用Cypress公司CYUSB2014-BZXI與上位機間進行USB3.0數據傳輸(USB3.0的最大速率5Gbit),為了降低USB數據傳輸開發復雜性,本文將USB3.0傳輸設置為單向傳輸,上位機與波前處理質心計算系統的控制由RS422完成。
3 基于FPGA的子孔徑光斑質心計算
夏克-哈特曼傳感器采用的EoSens CL相機工作在1020×1020分辨率,幀頻為560幀/s,采用Camera Link Extended-Full模式傳輸,像素時鐘為75MHz。每時鐘同時輸出10個像素,每個像素為8bit,共80bit,行有效周期為102個像素時鐘。其行時序如圖4所示(圖中每一個方塊代表一個像素,方塊中的數字表示像素的行方向坐標,T代表第個時鐘周期)。
如果實時將并行輸入的10個像素轉成串行的單個像素進行處理FPGA需要750MHz的處理時鐘,大大超過了FPGA能夠達到的最高時鐘,因此本文設計了一個行緩沖將高速多像素并行輸入的圖像數據變成低速像素為單位的串行的數據(如圖5所示),FPGA程序設計中將每一行數據按10個像素(80bit)75MHz時鐘頻率寫入兩個FIFO(64bit位寬和16bit位寬兩個FIFO組成一個80bit位寬的FIFO)中,再以1個像素(8bit)頻率FPGA(75MHz~200MHz,FPGA一般時鐘頻率)從FIFO中讀出,FIFO深度為128。每行數據的處理時間為1020個FPGA時鐘。
每一個質心計算核心模塊如圖6所示,由一個如圖6的行緩沖FIFO和兩個乘法累加器分別進行子孔徑內和方向的乘法運算及累加運算組成,質心計算核心模塊將FIFO讀出點在對應子孔徑參數進行運算。該運算為兩周期流水運算。質心計算核心模塊將計算后該行對應在子孔徑的3個乘積累計結果進行輸出。圖中YPos為當前質心計算核心模塊處理行在整個圖像中的行位置,XPos為當前處理像素在整個圖像中的列位置,Sum輸出為質心計算核心模塊處理完當前行后輸出的行像素值總和,IntgX為每一個子塊在行方向的乘法累加值,IntgY為每一個子塊在列方向的乘法累加值。
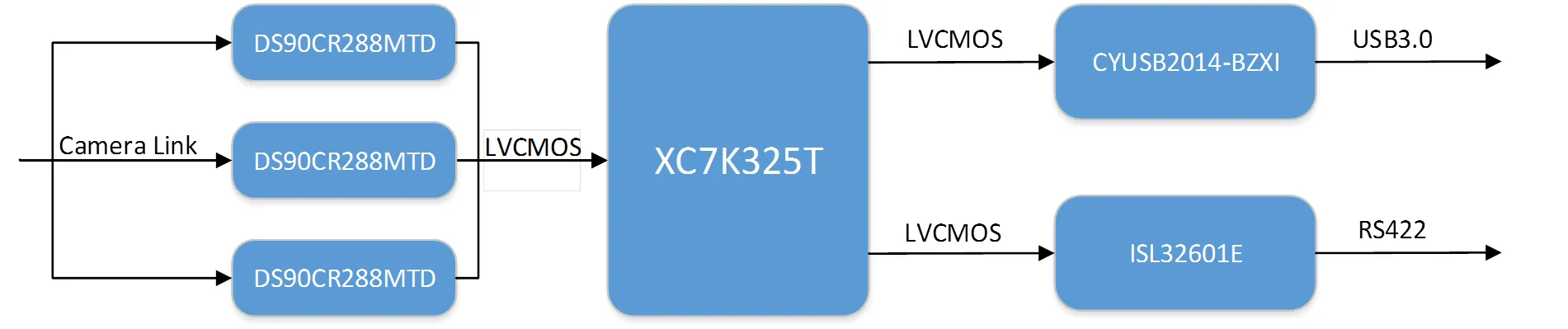
圖3 處理機硬件結構圖

圖4 EoSens CMOS探測器一行像素輸出時序

圖5 行緩沖將10像素80bit輸入轉成串行1像素8bit
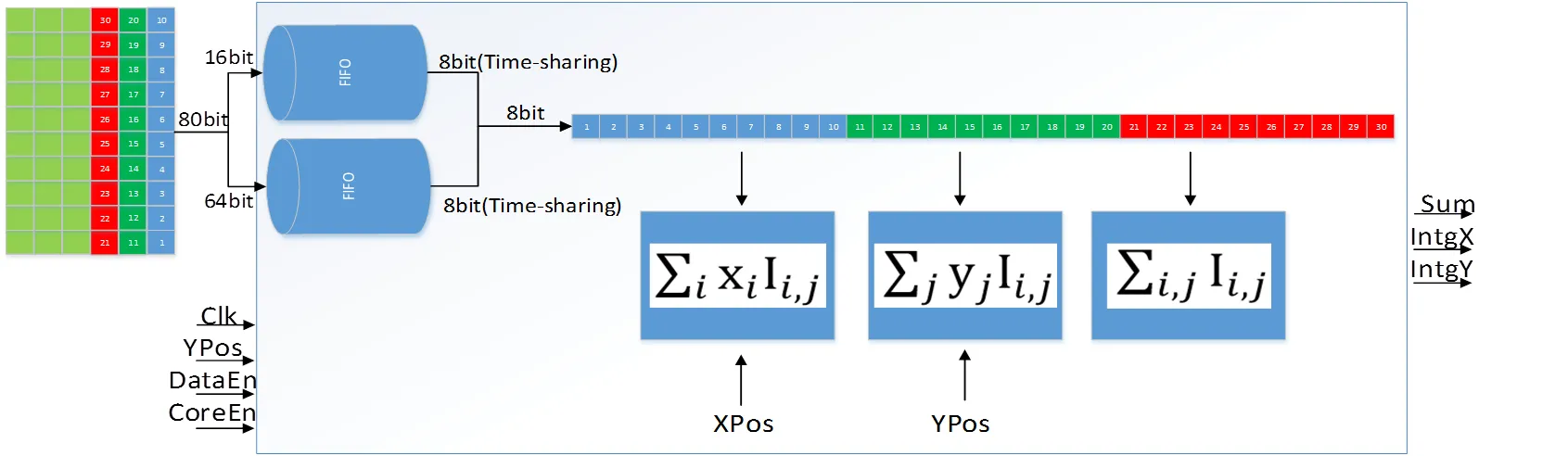
圖6 質心計算核心模塊
質心計算核心模塊工作在相機的像素時鐘頻率下(75MHz),相機行有效時間為lv時,質心計算核心模塊需要10lv的時間來處理一行的數據,因此一個質心計算核心模塊是顯然不夠的,但是如果每一行都有一個質心計算核心模塊會浪費大量的FPGA資源,甚至導致FPGA由于資源不夠而無法完成布局布線。為了滿足功能的需要又不造成FPGA資源的浪費,如圖7所示,本文采用核心模塊復用的質心計算方法,設計了共10個質心計算核心模塊,通過核心模塊選擇器分時復用使用這10個質心計算核心模塊,實現質心計算核心模塊的復用,減少FPGA資源的使用。
最終FPGA資源使用情況如圖8所示,FPGA資源使用中最重要的幾個指標LUT,FF,BRAM的使用量都在30%以下。
使用QuestaSim對圖9實際采集的夏克-哈特曼傳感器成像圖進行了仿真,仿真時序如圖10所示,每一行子孔徑質心位置結果可以在當前子孔徑所有行均輸入后延時10行時間輸出,采用的EoSens CL型相機工作在1020×1020分辨率560幀時,行周期小于1/(560×1020)=1.75ms,因此本系統的計算輸出延遲小于17.5ms。同時將QuestaSim仿真結果與Matlab計算的結果進行了對比,結果一致。

圖7 質心計算核心模塊復用

圖8 FPGA使用資源情況
表1將本文所采用的系統和方法與所查到文獻中其他處理系統與方法進行了比較,比較主要包括子孔徑的數量、傳感器的數據量和處理延時,本文所采用的系統和方法在子孔徑數量最多,數據量最大的情況下,也能夠將延時控制得最小。

圖9 夏克-哈特曼傳感器成像圖

圖10 時序仿真結果

表1 處理能力比較
4 實驗系統
實驗系統光路如圖11所示。光纖耦合輸出激光光源(635nm)經準直后通過分束鏡1垂直入射到變形鏡上。變形鏡用于產生畸變波前。畸變波前在分束鏡2處分為兩路,一路用于夏克-哈特曼傳感器進行波前探測,一路用于檢測遠場光斑的變化。由于變形鏡的通光口徑一般大于哈特曼傳感器的探測區域尺寸,實驗系統采用透鏡組L3和L4將變形鏡出射的光進行縮束,焦距之比等于變形鏡口徑與哈特曼探測區域直徑之比。夏克-哈特曼傳感器獲得的光斑陣列圖像經Cameralink接口發送給FPGA波前處理機進行實時質心計算,質心計算結果由上位機進行波前重構后得到畸變波前分布。

圖11 實驗光路圖
5 結論
目前夏克-哈特曼傳感器所用的高分辨率、高幀率探測器大多采用多通道并行傳輸的方式才能滿足自適應光學所要求的高分辨率、高幀頻的需求,本文提出的一種基于FPGA的夏克-哈特曼波前處理機,采用核心模塊復用的質心計算方法,兼顧了處理效率和FPGA資源的平衡,可以實時處理1020×1020分辨率、560幀/s圖像的成像器件和56×56子孔徑數微透鏡整列組成的夏克-哈特曼傳感器,數據輸出延遲小于17.5ms(10個行周期),而且FPGA資源占用率不到30%,由此推算用該FPGA至少可以處理圖像分辨率或圖像幀率增加1倍的哈特曼傳感器。
[1] 周璐春, 王春鴻, 李梅, 等. 基于FPGA技術的波前斜率處理方法[J]. 光電工程, 2002, 29(3): 28-31.
ZHOU Luchun, WANG Chunhong, LI Mei, et al. A wavefront slope processing method based on FPGA technique[J]., 2002, 29(3): 28-31
[2] 樊志華, 王春鴻, 姜文漢. 基于累加器的哈特曼-夏克波前斜率處理器[J]. 光學精密工程, 2011, 19(3): 501-507.
FAN Zhihua, WANG Chunhong, JIANG Wenhan. Accumulator -based wavefront slope processor for Shack-Hartmann sensors[J]., 2011, 19(3): 501-507.
[3] 陳善球, 劉超, 許冰, 等. 通用自適應光學波前實時處理機的設計[J]. 中國激光, 2015, 42(12): 1212001
CHEN Shanqiu, LIU Chao, XU Bing, et al. Design of generic adaptive optics wave-front real-time processor[J]., 2015, 42(12): 1212001
[4] 李大禹. 基于多GPU的液晶自適應光學波前處理器[J]. 液晶與顯示, 2016, 31(5): 491-496.
LI Dayu. Liquid crystal adaptive optics wavefront processor based on multi-GPU[J]., 2016, 31(5): 491-496.
[5] 賈建祿, 王建立, 趙金宇. 基于FPGA的自適應光學系統波前處理機[J]. 光學精密工程, 2011, 19(8): 1716-1722.
JIA Jianlu, WANG Jianli, ZHAO Jinyu, et al. Adaptive optical wave-front processor based on FPGA[J]., 2011, 19(8): 1716-1722.
[6] Mauch S, Reger J. Real-time spot detection and ordering for a Shack-Hartmann wavefront sensor with a low-cost FPGA[J]., 2014, 63(10): 2379-2386.
[7] 王建立. 349單元自適應光學波前處理器[J]. 光學精密工程, 2018, 26(5): 1007-1013.
WANG Jianli. Three hundred and forty-nine unit adaptive optical wave front processor[J]., 2018, 26(5): 1007-1013.
[8] Avinash Surendran, Mahesh P Burse, Ramaprakash A N, et al. Scalable platform for adaptive optics real-time control (SPARC) part 2: field programmable gate array (FPGA) implementation and performance[J].,,, 2018, 4(3): 039002.
Shack-Hartman Detector Real-time Wavefront Processor Based on FPGA
LIU Zhaoqing1,LI Li1,2,DONG Bing2,JIN Weiqi2
(1.,710065,; 2.,,100081,)
The Shack-Hartman wavefront sensor is the most widely used real-time wavefront detector in adaptive optics systems. In this study, a Shack-Hartmann sensor with high resolution, high frame rate, and a large-scale sub-aperture number is proposed. Based on the requirements of wavefront processing calculations and real-time performance, a field-programmable gate array (FPGA) is also proposed. The real-time wavefront processor structure and wavefront slope calculation method are investigated. The system employed the core processing module to reuse the method to calculate the centroid of the spot in the sub-aperture and transmitted the processed centroid data to the PC in real time through USB 3.0. The processor was designed with a XILINX Kintex7-325T FPGA processing chip. The results demonstrate that the algorithm can perform low-latency, real-time operations on 1020′1020 images and 56′56 sub-aperture Hartmann sensors at 560 frames per second. The spot centroid calculation increased the wavefront processing speed of the system and the control speed of the entire adaptive optics system.
Shack-Hartmann sensor,real-time wavefront detector,FPGA
TN219
A
1001-8891(2021)08-0717-06
2019-12-12;
2021-04-26.
劉召慶(1979-),男,研究員,主要研究方向為光電系統總體技術。E-mail:12134171@qq.com。
李力(1982-),男,講師,主要研究方向為數字圖像處理。E-mail:lili@bit.edu.cn。
國家自然基金(11874087)。
