非制冷型640×512面陣紅外導引頭光學系統設計
2021-08-31 01:01:20孫愛平龔楊云浦恩昌李澤民雷旭峰
紅外技術 2021年8期
關鍵詞:設計
孫愛平,龔楊云,浦恩昌,李澤民,雷旭峰
非制冷型640×512面陣紅外導引頭光學系統設計
孫愛平,龔楊云,浦恩昌,李澤民,雷旭峰
(北方夜視科技研究院集團有限公司,云南 昆明 650223)
為了增大視場角、提高探測距離,本文設計了一款采用640×512面陣非制冷機芯的紅外成像導引頭。首先分析了紅外成像導引頭多種結構型式,結合本文設計要求的特點,選擇了萬向支架式的結構型式;其次對紅外導引頭光學系統進行像質優化,并對框架角及盲區的滿足情況開展分析;最后以實物樣機的試驗情況,說明此紅外成像導引頭成像質量良好,能滿足搜索、跟蹤目標的要求。
導引頭;紅外;框架角;盲區
0 引言
現代導彈的制導模式多種多樣,具有單模、雙模和多模3種制導模式,每種制導模式主要使用雷達、毫米波、主動/半主動激光、電視、紅外等制導技術,各種制導技術根據自身的技術特點具有特定的使用范圍。紅外制導技術具有精度高、隱蔽性好、抗干擾能力強、能晝夜作戰,在精確制導武器中備受青睞[1]。紅外導引頭分為熱點式導引頭和紅外成像導引頭[2]。紅外成像導引頭是紅外制導導彈的關鍵部件之一,而紅外導引頭光學系統是紅外成像導引頭的“眼睛”[3]。紅外成像導引頭技術從單像元、線陣發展到面陣成像,其空間分辨率和抗干擾能力得到不斷提高[4-5]。
制冷型紅外探測器由于具有較高的靈敏度和較短的熱響應時間,在早期的紅外成像導引頭中得到廣泛的應用。隨著非制冷型紅外探測器制造技術的快速發展,熱響應時間和靈敏度性能的不斷提升,非制冷型紅外探測器在紅外成像導引頭中逐漸得到應用。非制冷型紅外成像導引頭由于摒棄了體積大、重量重且價格昂貴的制冷機,與制冷型紅外成像導引頭相比具有體積小、重量輕、價格低的優點,可大大地減小導引頭的尺寸和重量,實現了導引頭的小型化,并且已成為紅外成像導引頭的重要成員之一。經過多年的發展,非制冷型紅外成像導引頭已廣泛用于反坦克導彈、精確攻擊導彈、小直徑炸彈、反艦導彈等[6]。
基于以上分析,本文設計了一款適用于152mm中口徑彈徑的非制冷型、紅外導引頭的光學系統,并以仿真及試驗結果說明此款紅外成像導引頭的性能。
1 紅外導引頭系統組成
紅外成像導引頭主要由位標器及電子艙所組成,位標器主要包含紅外成像組及伺服系統;電子艙主要包含伺服控制電路及圖像處理電路。根據紅外成像組與彈體耦合方式的不同,位標器可分為捷聯式、萬向支架式及陀螺式。捷聯式位標器的紅外成像組與彈體直接固定,不具備視場掃描能力;萬向支架式位標器的紅外成像組固定在萬向支架上,可隨萬向支架轉動形成掃描視場;陀螺式位標器的紅外成像組全部或部分隨陀螺轉動形成掃描視場。捷聯式紅外成像導引頭不具備視場掃描能力,只能跟蹤固定大型目標或者運動速度較慢的目標,系統結構簡單、制導精度低;萬向支架式紅外成像導引頭具備視場掃描能力,可跟蹤中速運動的目標,系統結構較復雜、制導精度較高;陀螺式紅外成像導引頭也具備視場掃描能力,可跟蹤速度高的運動目標,系統結構更復雜、制導精度高。
成都鼎屹信息技術有限公司已經開發出采用384×288非制冷型長波紅外機芯的萬向支架式紅外成像導引頭,此款導引頭在保證探測距離的條件下,瞬時視場比較小,需要輔助一定的框架角以提高搜索、跟蹤的視場范圍。紅外成像導引頭為了得到更遠的探測距離、更大的瞬時視場,需要采用更長的光學焦距、更高分辨率的紅外機芯,例如常用的640×512非制冷型長波紅外機芯。
本文所設計的用于152mm中口徑彈徑紅外導引頭光學系統要求跟蹤移動的中型坦克目標,其速度中等,可選用萬向支架式的結構型式,此結構型式復雜度中等,精度也能滿足要求,同時可降低制造的成本。
2 紅外導引頭光學系統設計
2.1 設計指標
為了提高紅外成像導引頭的搜索、跟蹤距離及瞬時視場,本文采用640×512非制冷型長波紅外機芯;為了提高紅外成像導引頭的搜索、跟蹤能力,采取了萬向支架式的結構型式。紅外成像導引頭著重于搜索、跟蹤遠距離的目標,此目標所成圖像為一個具有一定尺寸、一定對比度的熱點圖像。通過增大紅外導引頭光學系統的有效口徑(減小光學系統的F/#),可增加接收的目標輻射能量,增大目標成像對比度及探測概率。640×512面陣、非制冷型紅外導引頭光學系統設計參數如表1所示。
2.2 紅外導引頭光學系統性能優化分析
紅外導引頭光學系統由整流罩及紅外成像組所組成。整流罩的面型大小及外形尺寸受紅外制導導彈的氣動特性及框架角的大小所決定。整流罩材料選用透過率高、工藝性比較好的熱壓ZnS材料。紅外制導導彈在飛行過程中需要搜索、跟蹤運動的目標,紅外成像組在俯仰及偏航方向具有一定的轉動角量。為了保證轉動時光學成像特性不變,則整流罩需要做成同心、等厚的球冠,并且使紅外成像組的轉動中心與整流罩的球心相重合。本文所設計的整流罩內、外半徑分別為72mm、76mm,厚度為4mm,外徑為126mm。
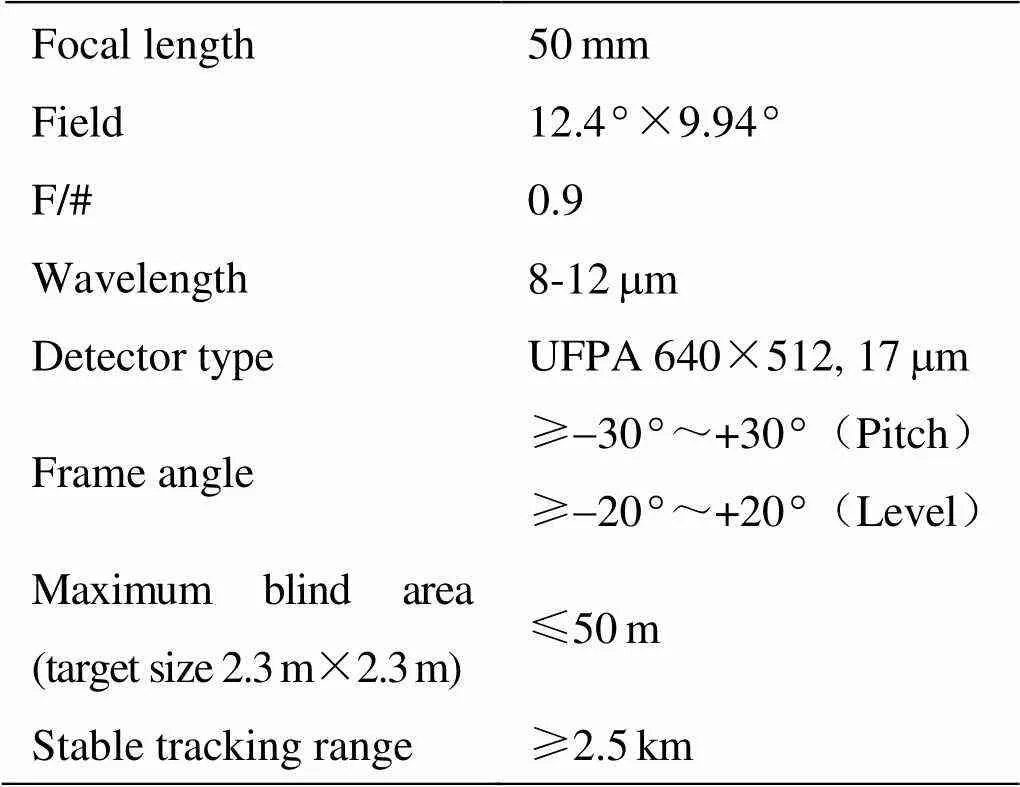
表1 紅外導引頭光學系統設計參數
紅外制導導彈在發射前隨季節及地理位置的變化環境溫度變化較大,發射后飛行段彈體的溫度也會發生比較大的變化,工作溫度的變化使紅外導引頭光學系統的焦面發生一定量的位移并且不易人為調節補償,造成成像模糊、不利于搜索、跟蹤,因此紅外導引頭光學系統需要進行光學被動式消熱差設計。
光學被動式消熱差光學設計的基本原理在孫愛平[7]等相關論文中已有詳細論述。紅外成像組采取三片式設計型式,配合整流罩進行像差優化。在設計過程中加入衍射面,衍射光學元件其特殊的光學特性可單獨作為一種特殊的光學材料參與像差優化。紅外導引頭光學系統選用線膨脹系數較小的Ge材料(=5.8×10-6/K)、線膨脹系數較大的IG6材料(=21.2×10-6/K)、整流罩熱壓ZnS材料(=6.6×10-6/K)及衍射元件配合鏡筒Al材料(=23.6×10-6/K)進行光學被動式消熱差設計。根據光學被動式消熱差的基本原理,需要3種以上的紅外材料進行消熱差設計,本文采用3種光學材料及一種特殊的光學材料——衍射光學元件,足以滿足光學被動式消熱差設計的要求。紅外導引頭光學系統為大孔徑光學系統(F/#=0.9),相應的孔徑像差比較難校正,它需要校正軸向球差、垂軸球差、軸向色差、垂軸色差、慧差、場曲、畸變7種像差及對應的高級像差。由于紅外材料比較昂貴,在設計時需要遵循使用最少透鏡的原則。本文4個透鏡所提供的變量不足以校正7種像差及對應的高級像差,因此在設計時加入非球面以增加變量個數,實現比較好的像差校正效果。
紅外導引頭光學系統的衍射元件為基諾衍射光學元件,此衍射面理論上可放置在除球罩外的任何表面上,經過光學的優化設計結果比對,衍射面放置在第一透鏡的第二表面上,像質效果最優。
紅外導引頭光學系統衍射面的基底面型為偶次非球面,對應衍射效率計算公式如下:
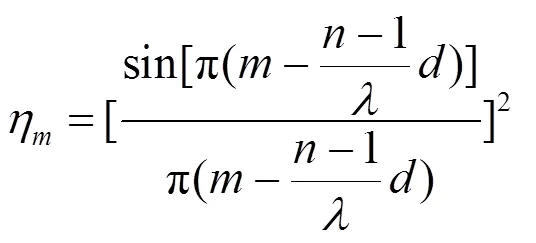
紅外導引頭光學系統衍射面衍射級次為第一級(=1),中心波長為9.6mm,基底材料為IRG206(對應9.6mm波長的折射率為2.77908),對應刻蝕深度計算如下:

則中心波長處的衍射效率為100%。
基諾衍射面可由金剛石車床車削加工,基底可為平面、球面及非球面,其最小尺寸受刀具半徑的限制。此衍射面的最小環帶半徑D間隔為1.055953mm,能滿足加工廠家最小刀具的要求。基諾衍射面加工的理想面型如圖1所示。衍射面可使用輪廓儀進行檢測,由峰-谷值和均方根值來判斷衍射面的加工質量。基諾衍射面檢驗結果如圖2所示。
紅外導引頭光學系統的光學布局型式如圖3所示。使用ZEMAX軟件進行像質優化,在常溫(20℃)、低溫(-40℃)、高溫(60℃)特定工作條件下,中心頻率點30lp/mm處的MTF曲線對比度大部分在0.5以上;通過判讀點列圖及能量包圍曲線,約有85%的能量集中在一個像素內;通過場曲及畸變曲線可知畸變值均小于0.4%。通過以上分析,紅外導引頭光學系統消熱差效果好,能夠滿足設計要求。圖4、圖5、圖6分別為常溫(20℃)、低溫(-40℃)、高溫(60℃)條件下的MTF曲線、點列圖、能量包圍曲線、場曲與畸變曲線。
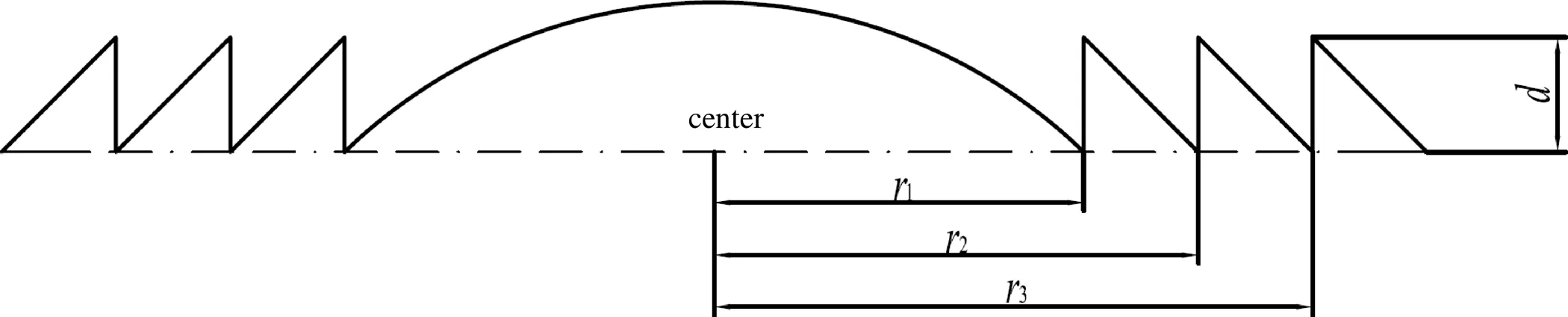
圖1 基諾衍射面理想面型
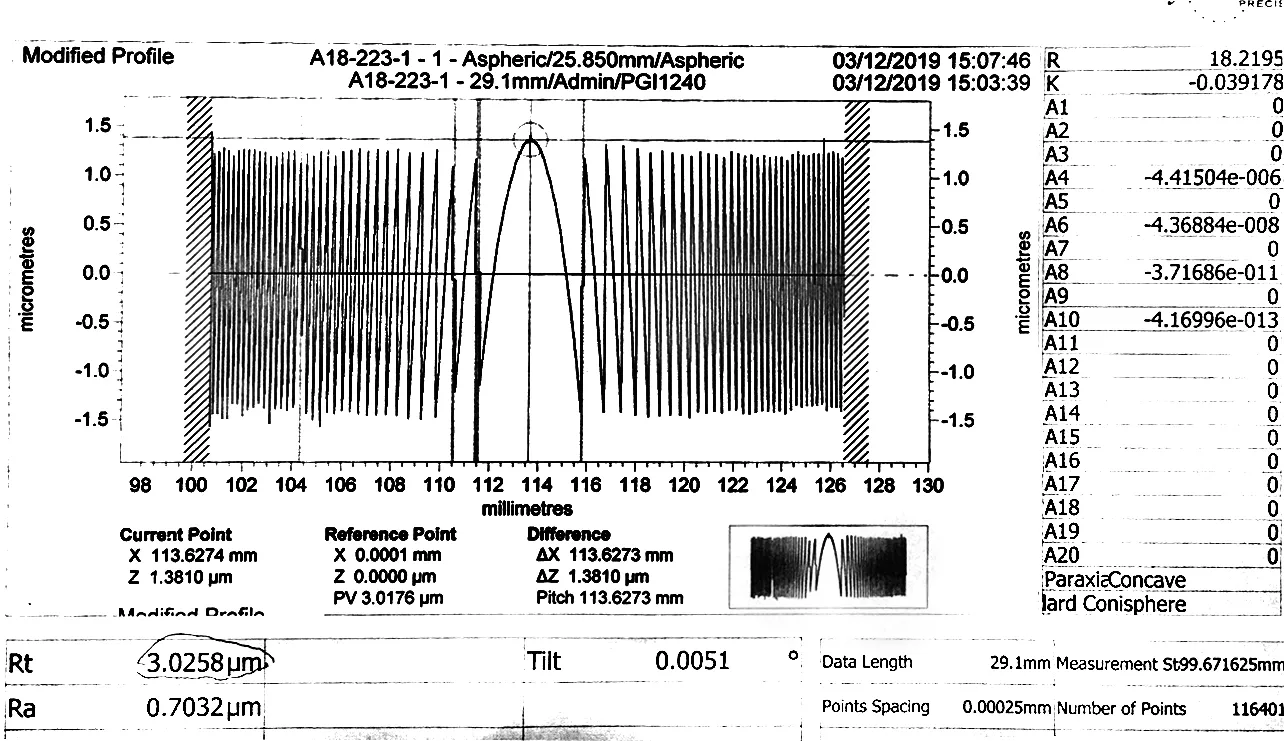
圖2 基諾衍射面檢測結果
圖3 紅外導引頭光學系統布局型式圖
圖4 在20℃工作條件下紅外導引頭光學系統的MTF曲線、點列圖、能量包圍曲線、場曲與畸變曲線
圖5 在-40℃工作條件下紅外導引頭光學系統的MTF曲線、點列圖、能量包圍曲線、場曲與畸變曲線
圖6 在60℃工作條件下紅外導引頭光學系統的MTF曲線、點列圖、能量包圍曲線、場曲與畸變曲線
紅外導引頭光學系統的焦深為±2(F/#)=±2×9.6mm×0.92≈±17.7mm,所設計的光學系統工作在-40℃~60℃范圍內時,離焦量在一個焦深以內,如表2所示,則此光學被動消熱差系統在整個工作溫度內均能清晰成像。
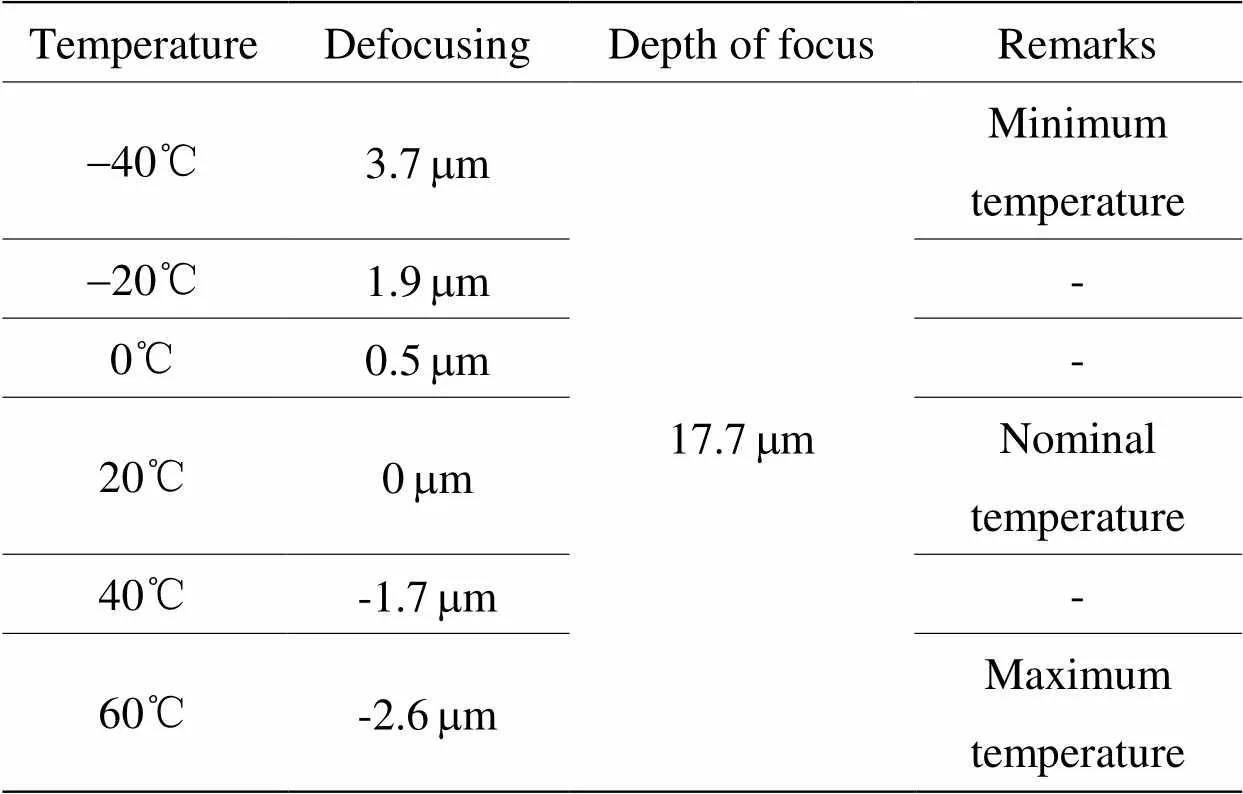
表2 紅外導引頭光學系統離焦量表
2.3 框架角分析
隨著紅外制導導彈及目標的運動軌跡、運動速度的不同,在導彈飛行過程中出現目標移出瞬時視場的現象,造成目標丟失,此時需要紅外導引頭光學系統隨目標移動方向轉動形成一定的掃描視場,使目標始終處于紅外導引頭的瞬時視場內。紅外導引頭光學系統轉動的角量對應著框架角值。
紅外導引頭光學系統轉動角量為0°時,此時上邊緣光線與球罩的交點到光軸的距離為1,對應圓心角為;當轉動角度為時,上邊緣光線與球罩最外邊緣相重合,并且與光軸距離為2,此時對應圓心角為;為球罩外圓半徑,如圖7所示。則框架角計算如下:

本文所設計紅外導引頭光學系統對應的1=29.5mm、2=63mm、=76mm,代入上式可得=33.1°,如圖8所示。由于紅外導引頭光學系統為球對稱系統,故其框架角能夠滿足俯仰±30°、偏航±20°的要求。
圖7 框架角計算示意圖
Fig.7 Schematic diagram of frame angle calculation
2.4 盲區分析
紅外制導導彈是依據目標所成圖像的輪廓特征實現搜索、跟蹤。當目標充滿成像機芯任意一個方向時,形成跟蹤盲區,后續階段依據導彈的慣性制導攻擊目標。盲區距離越小,慣性制導段越短,攻擊成功率就越高。
成像機芯分辨率為640×512,像元間距為17mm,對應的靶面尺寸為10.88mm×8.704mm,2.3m×2.3m的中型坦克目標充滿水平、豎直向的條件下對應的盲區距離計算如下:
水平向盲區距離計算:
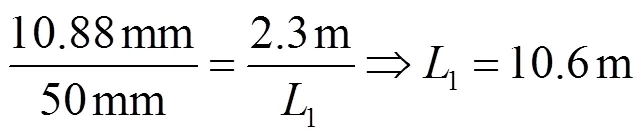
豎直向盲區距離計算:
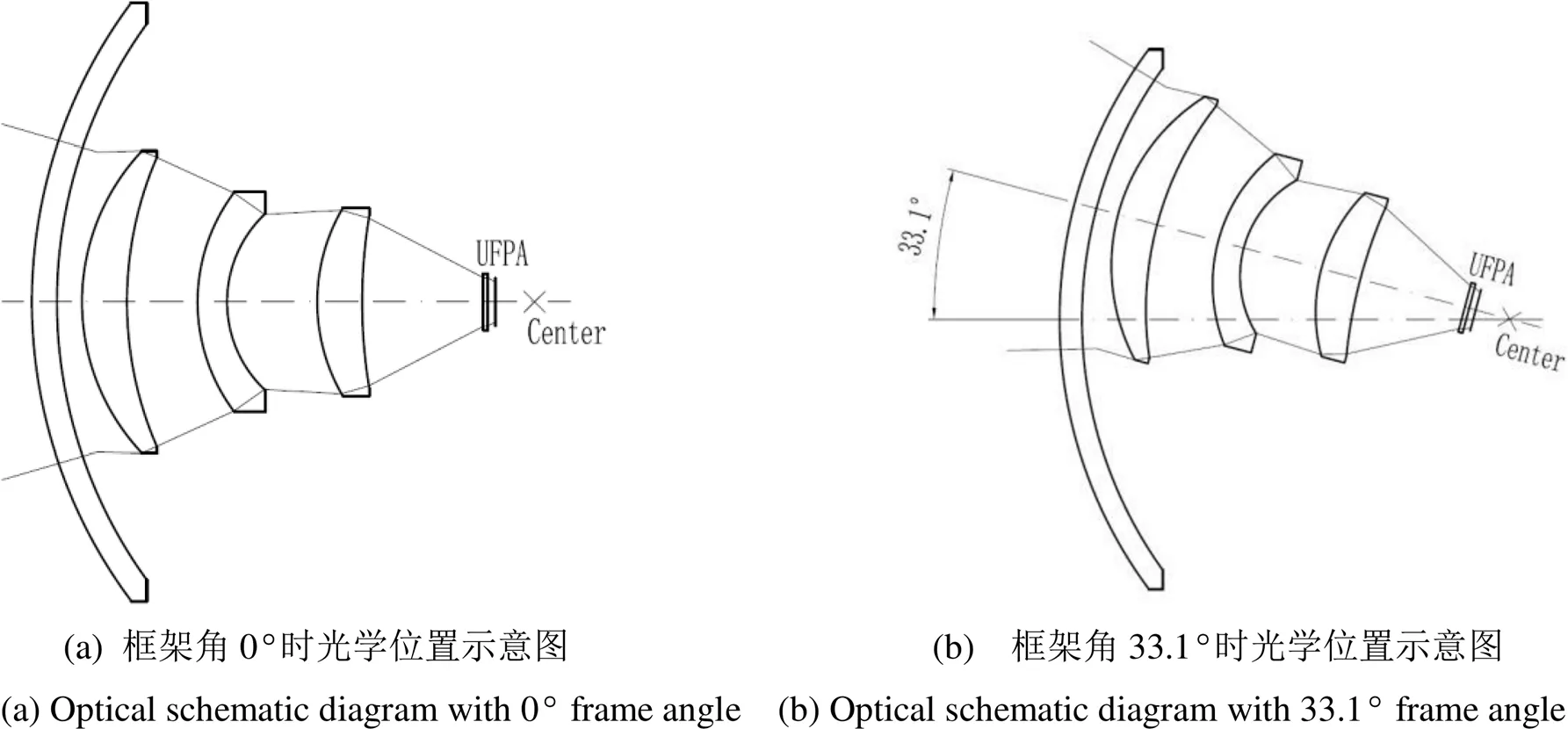
圖8 導引頭框架角在0°、33.1°工作時光學位置示意圖
Fig.8 Optical schematic diagram when seeker frame angle is 0°and 33.1°
綜上所述,2.3m×2.3m的中型坦克目標充滿成像機芯的短邊時,盲區距離最遠(13.2m),此距離值小于50m的要求。
2.5 公差分析
紅外導引頭光學系統按表3分配零件公差,焦面位移作為補償,以平均概率分布方式分配實際裝配及加工時的公差值,并采用蒙特卡羅分析方法模擬加工裝配后的虛擬鏡頭的MTF變化,依此判斷實際鏡頭的成像效果。表4的蒙特卡羅分析結果表明90%的鏡頭在奈奎斯特頻率處具有不小于0.239的MTF值,焦面補償在±0.5mm以內。此鏡頭加工及裝配工藝比較成熟,且整個鏡頭的成像質量較好,即公差分配合理。
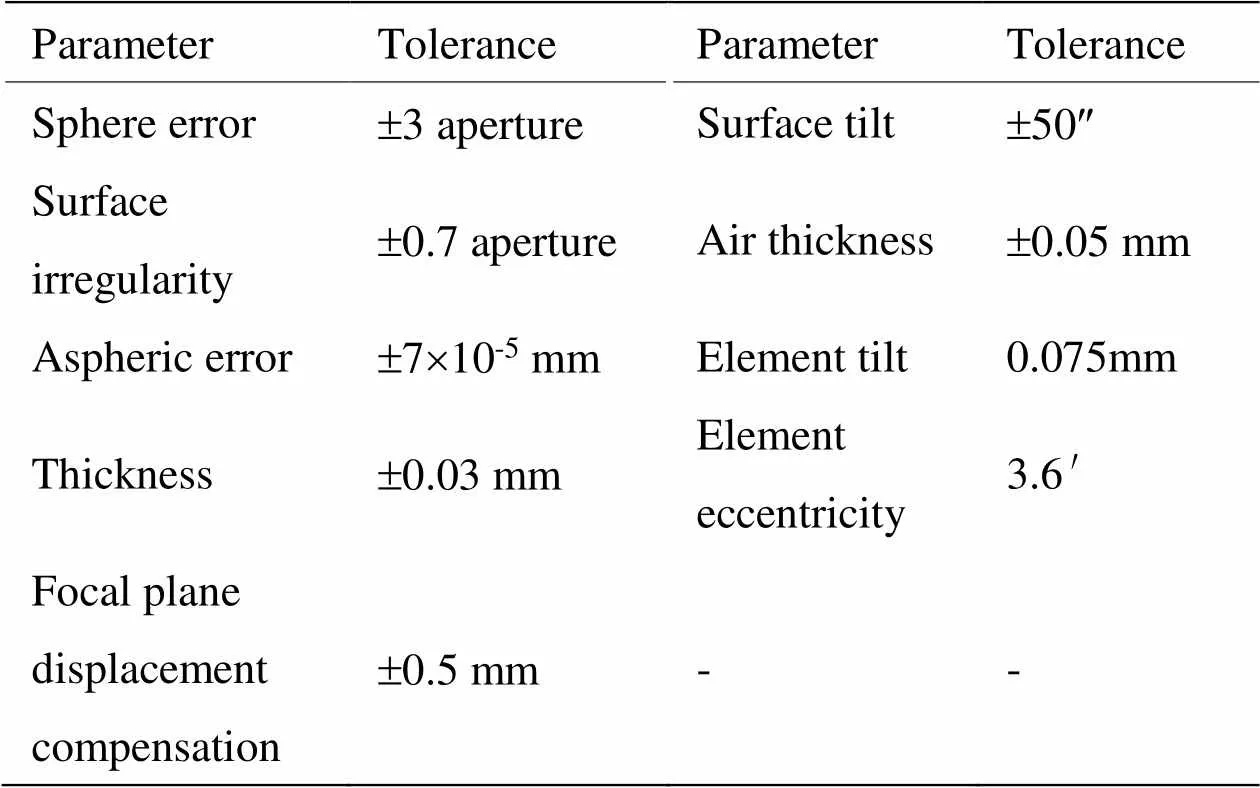
表3 零件公差表
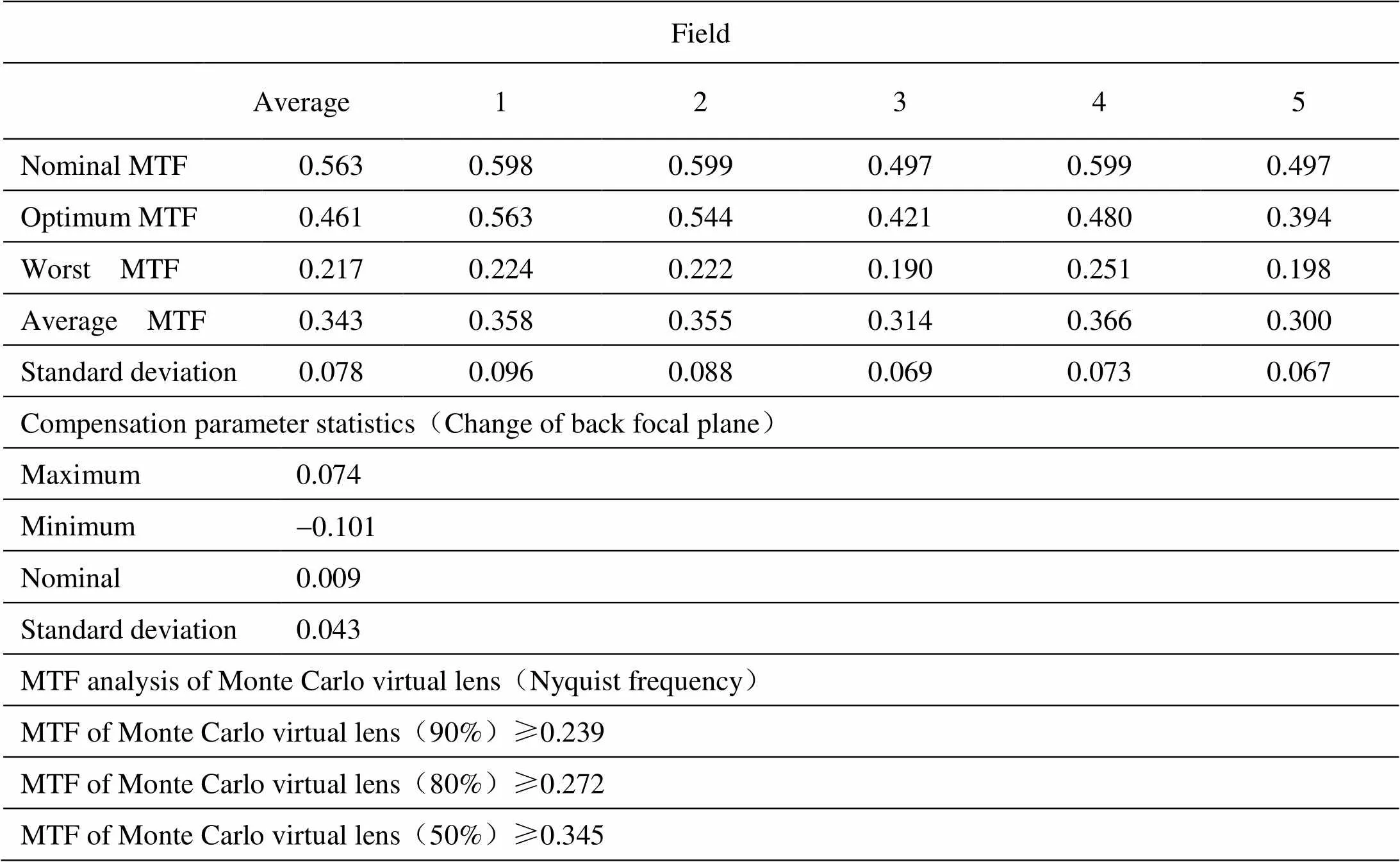
表4 蒙特卡羅虛擬鏡頭分析結果
3 紅外成像導引頭實際效果
圖9是調試時截取觀察到的高架橋上的私家車輛的圖片,可清晰分辨出小尺寸的私家車輛目標;圖10是紅外成像導引頭外場打靶試驗視頻截圖。通過以上試驗可得出此紅外成像導引頭成像質量好,跟蹤捕捉精度高,能夠滿足使用要求。
4 結論
本文設計了一款適用于152mm彈徑的非制冷型、紅外導引頭成像系統。詳細介紹了紅外導引頭各種設計方案的優劣,提出使用萬向支架式的設計方案。根據此方案對紅外導引頭光學系統進行像質優化及分析,得到比較好的成像效果,并對框架角及盲區開展分析計算。通過紅外成像導引頭調試試驗截圖、外場調試試驗截圖及掛飛試驗截圖的分析,得出成像質量良好,能夠實現搜索、跟蹤目標的功能。此紅外導引頭光學系統的設計,可以后類似系統的開發提供參考。

圖9 紅外成像導引頭調試時截圖
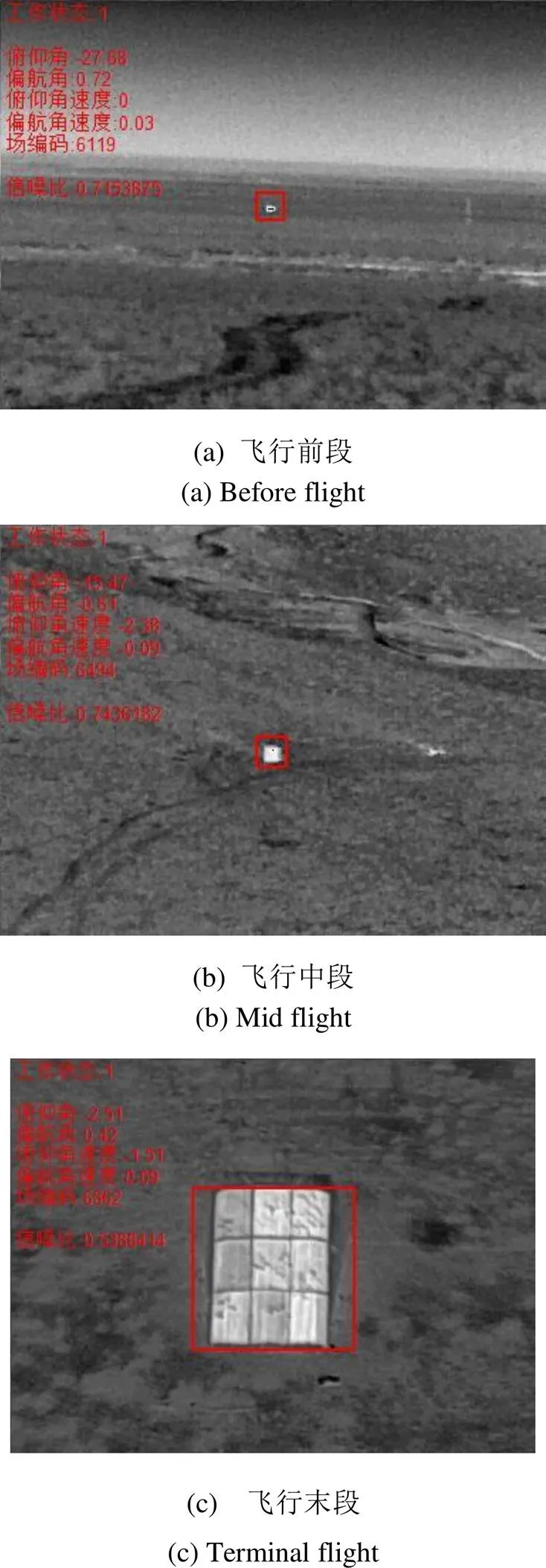
圖10 打靶試驗截圖
[1] 李煜, 白丕績, 陶禹, 等. 應用于紅外成像導引頭的非制冷焦平面探測器[J]. 紅外技術, 2016, 38(4): 280-289.
LI Yu, BAI Piji, TAO Yu, et al. Uncooled focal plane arrays detector applied for infrared imaging seeker[J]., 2016, 38(4): 280-289.
[2] 湯永濤, 林鴻生, 陳春. 現代導彈導引頭發展綜述[J]. 制導與引信, 2014, 35(1): 12-17.
TANG Yongtao, LIN Hongsheng, CHEN Chun. The development and summary of modern missile seeker[J]., 2014, 35(1): 12-17.
[3] 姜成舟, 段萌, 潘國慶, 等. 一種小型化探測器固聯于彈體式導引頭光學系統設計[J]. 紅外技術, 2014, 36(9): 743-747.
JIANG Chengzhou, DUAN Meng, PAN Guoqing, et al. A miniaturized optical system design of seeker with detector fixation[J]., 2014, 36(9): 743-747.
[4] 趙善彪, 張天孝, 李曉鐘. 紅外導引頭綜述[J].飛航導彈, 2006(8): 42-45.
ZHAO Shanbiao, ZHANG Tianxiao, LI Xiaozhong. A summary of infrared seeker[J]., 2006(8):42-45.
[5] 劉珂, 陳寶國, 李麗娟. 空空導彈紅外導引頭技術發展趨勢及關鍵技術[J]. 激光與紅外, 2011, 41(10): 1117-1121.
LIU Ke, CHEN Baoguo, LI Lijuan. Development tendency and key technology of IR seeker for air-to-air missile[J]., 2011, 41(10): 1117-1121.
[6] Fraenkel R, Haski J, Mizrahi U, et al. Cooled and uncooled infrared detectors for missile seekers[C]//, 2014, 9070: 90700P.
[7] 孫愛平, 龔楊云, 朱尤攀, 等. 大孔徑、大視場輔助駕駛儀紅外鏡頭無熱化設計[J]. 紅外技術, 2013, 35(10): 617-622.
SUN Aiping, GONG Yangyun, ZHU Youpan, et al. Optical system design of low-light-level and infrared image fusion hand-held viewer[J]., 2013, 35(11): 712-717.
Optical System Design of Uncooled 640×512 Infrared Seeker
SUN Aiping,GONG Yangyun,PU Enchang,LI Zemin,LEI Xufeng
(,650223,)
In order to increase the angle of field and the detection distance, we designed an infrared imaging seeker using an 640×512 uncooled FPA. Firstly, we analyzed various structural types of infrared imaging seeker. Based on the characteristics of the design requirements, the universal support type structural type is selected. Secondly, we optimized the image quality of the infrared seeker optical system and analyzed the satisfaction of the frame angle and blind area. Finally, the test results of the real prototype show that the infrared imaging seeker has good imaging quality and can meet the requirements of searching and tracking targets.
seeker, infrared, frame angle, blind area
TN219
A
1001-8891(2021)08-0736-07
2019-12-11;
2021-01-19.
孫愛平(1980-),男,碩士,高級工程師,研究方向:光學系統設計。E-mail:50973525@qq.com。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
