三維激光倒置掃描關鍵技術研究
2021-08-31 00:56:34張志鵬邵學君
紅外技術 2021年8期
張志鵬,邵學君,龐 慶
三維激光倒置掃描關鍵技術研究
張志鵬,邵學君,龐 慶
(中國鐵道科學研究院集團有限公司,北京 100081)
對比常規三維激光正置掃描技術,研究了三維激光倒置掃描關鍵技術。研究倒置掃描入射角技術,確定了硬件三腳架倒置安裝條件,滿足合理的掃描入射角,達到點云的較好采集效果。在軟件方面研究了高效自動去除噪點技術,實現倒置掃描噪點的自動高效去除。通過試驗比較,采用三維激光倒置掃描關鍵技術,能夠較好實現倒置掃描且掃描效果較好,降低了現場工作強度,提高了工作效率,拓展了三維激光掃描技術應用領域,為采用倒置掃描技術、自動高效噪點處理技術等方面提供參考,同時,也為紅外技術在圖像融合、影像信息識別、圖像降噪等方面提供借鑒。
三維激光;倒置掃描;點云;噪點;紅外技術
0 引言
三維激光掃描技術是一種先進的全自動高精度立體掃描技術[1],以非接觸、快速掃描、獲取信息量大、實時性強、自動化測量等特點逐漸在工程測量、文物保護、醫學研究等領域得到推廣應用[2-3]。測量過程一般采用正置的掃描方式。隨著三維掃描技術應用的拓展,在對一些以鐵路罐車為代表的大型容器掃描時,發現正置掃描方式難以滿足現場測量要求。正置掃描方式需要操作人員進入容器內,而容器內常常含氧量不足,有毒、有害、腐蝕介質會對人身安全造成危害,如不進入容器內掃描則需要多次移站掃描,多次移站掃描一方面耗時效率低,同時受現場場地限制,另一方面后續海量點云拼接等處理耗時且效果不好。倒置掃描技術憑借其技術優勢,應用需求不斷擴大。倒置掃描無需操作人員進入容器內,人員安全有保障,一站掃描,不受外界場地等影響,現場工作量小且工作效率高,點云質量相對高,后續點云處理快速高效。目前,倒置掃描技術在國內外研究較少,為了解決以上迫切需求,開展了三維激光倒置掃描關鍵技術研究,通過研究設計倒置掃描硬件入射角關鍵技術和軟件自動高效快速去噪關鍵技術,實現三維激光倒置掃描。
1 三維激光掃描技術原理
三維激光掃描技術采用激光測距技術和精密分度技術,用激光作為光源進行高速電子測距,水平方向按照預定分度緩慢旋轉,垂直方向按照預定分度高速旋轉,接收器接收反射回來的激光,實現對被測對象三維掃描,掃描示意圖如圖1所示。三維激光掃描獲取高準確度、高密度的(,,)三維坐標點云[4-5],通過將海量點云進行配準、合并、去雜、平滑、數據分割、三維變換[6-8],并將經過以上處理的點云進行數據精簡、模型構建等[9-10],最終形成由點云組成的被掃描對象的數據模型,依據該數據模型進行相關后期計算處理[11-12],具體流程如圖2所示。
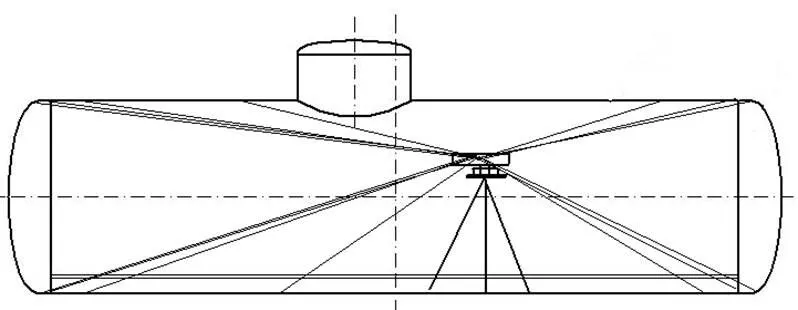
圖1 正置掃描示意圖

圖2 三維激光掃描流程圖
2 倒置掃描硬件關鍵技術
倒置掃描硬件除三維激光掃描儀具備倒置補償功能、三腳架具備倒置使用功能外,主要考慮掃描儀倒置后采集點云的質量問題,在此主要考慮掃描入射角問題,倒置掃描示意圖如圖3所示。
當三維激光掃描儀激光發射器發射出激光到達被掃描對象表面時會發生漫反射[13],其中一部分激光會經掃描對象表面反射后回到掃描儀激光接收器[14-15]。能否有效反射回掃描儀激光接收器直接影響掃描效果。我們在研究時注意到,當激光發射光軸與目標漫反射面法線重合時,主要反射能量集中在一定角度區域內,相比較之下,發射的激光束越傾斜、發射的距離將會越遠、發射的激光能量也將會越弱,直接導致激光接收器接收到反饋回來的激光能量衰減,甚至沒有到達接收器能量已消耗殆盡,從而導致掃描儀能識別的點云較少,反映在點云圖上就是黑洞和噪點。我們開展大量試驗,經過試驗對比,針對同一掃描對象得到截然不同的掃描效果,如圖4所示,左側掃描點云由于沒有合理設置入射角導致點云缺失嚴重,右側掃描點云在合理設置入射角后,對應位置沒有出現相似的情況且點云效果良好。
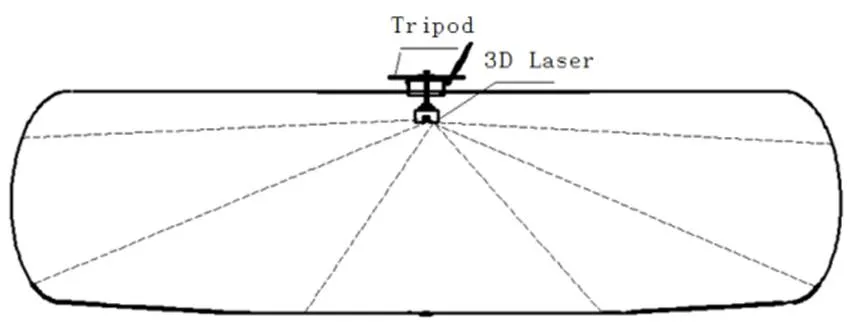
圖3 倒置掃描示意圖
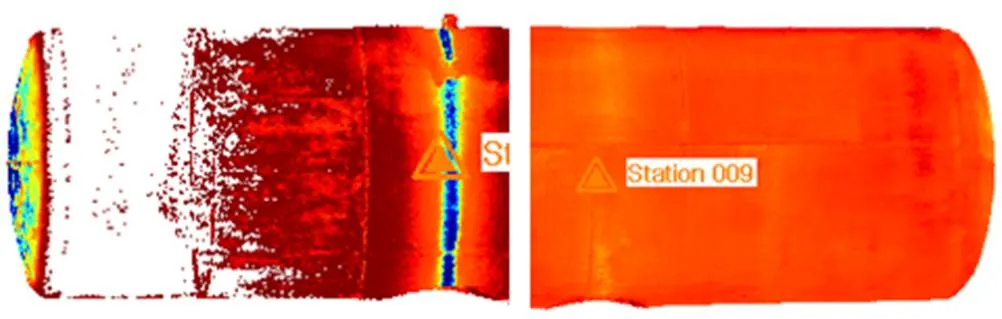
圖4 掃描點云對比圖
通過調整三維激光掃描儀與被掃描對象之間的位置關系,避免出現不合理的入射角。以鐵路罐車(箱)為例,在掃描過程中調整三腳架安裝條件,即通過調整三腳架的位置和中軸的長度使得三維激光掃描儀倒置后在軸、軸、軸方向發生變換,實現合理的掃描入射角。經過大量試驗,我們研究得到,對于一定功率的發射激光,在激光束與被掃描對象的夾角保持35°入射角掃描時,掃描效果較好,所以在倒置掃描時,需要確定三腳架的固定位置以及調整中軸長度,實現在條件最苛刻的位置倒置掃描入射角滿足35°。以25°入射角、以35°入射角、以45°入射角為例,掃描標靶點云效果如圖5所示,相比圖(a)25°入射角掃描標靶點云和圖(c)45°入射角掃描標靶點云,圖(b)35°入射角掃描標靶點云效果較好。
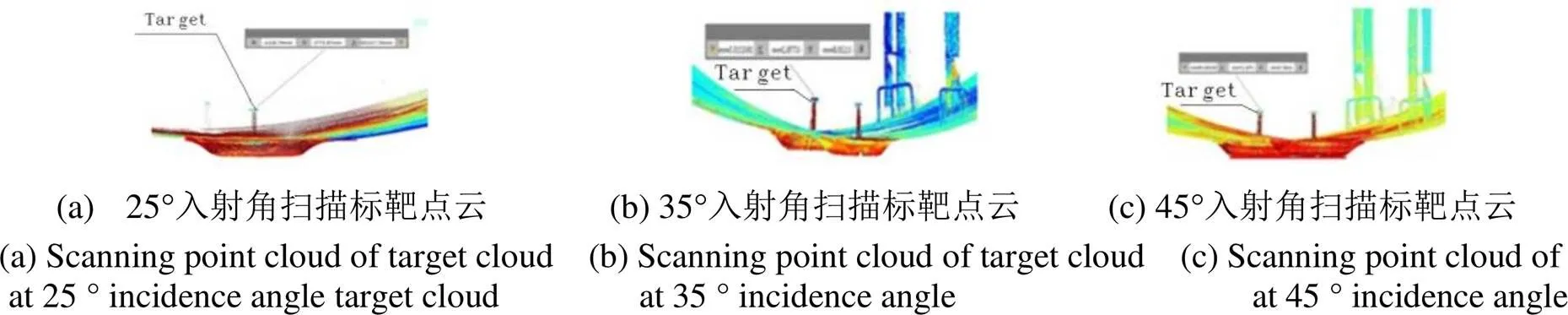
圖5 不同入射角掃描點云效果
3 倒置掃描軟件關鍵技術
常規的點云處理過程需要大量人工參與、步驟繁瑣、工作量大[16-17],倒置掃描軟件關鍵技術主要針對倒置掃描實現自動高效快速去噪處理。
首先,倒置坐標轉換。由于倒置掃描,掃描的點云圖與正常視覺正好相反,需要將倒置的點云翻轉,采用圍繞坐標軸旋轉的復合來表示旋轉。沿著坐標軸旋轉180°,實現點云的正置。
繞軸旋轉的矩陣表示式如(1)所示:
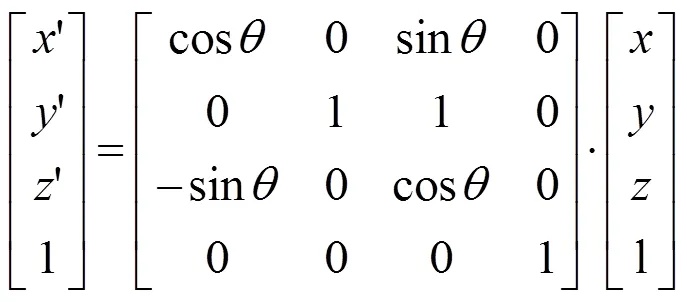
式中:表示指定的旋轉角。
其次,去除孤立的噪點。由于三維激光掃描的軌跡是基于螺旋式的激光點高速往返完成的,我們設置一站內的掃描對象一般為連續過渡且可見,所以在一條掃描的螺旋線軌跡上的任何相鄰的若干個點云(,,)之間都應有較強的一致性。即點云按照、、方向排列具有一致性,該一致性基于掃描設置的參數和掃描精度而確定,在對點云處理時,首先,按照順序依次查看三維空間中有點云的部位,記錄有點云部位并劃分為不同的點云集合{1,2,3,4,5,6,7,…},在不同的點云集合中依次以點云為中心,向周圍擴展并查看其周圍點云部位坐標(,,),判斷是否存在、、方向排列一致性,這樣直到查看完所有劃分的點云部位和點云集合{1,2,3,4,5,6,7,…},從而可以有效剔除非連續的內部和外部的孤立的噪點,如圖6所示為存在噪點的點云圖,圖(a)為外部非連續的孤立噪點,圖(b)為內部非連續的孤立噪點。
最后,主要去除點云貼合較為緊密的噪點即對較厚的點云“墻”進行“瘦身”。依據上一步對點云進行區域劃分后形成的點云集合{1,2,3,4,5,6,7,…},對每個集合的邊緣數據(,,)進行比較分析,由于點云一致性的特點,通過逐項計算區域內、、直到n、n、n,從而可以確定該區域實際物體的走向±、±、±,按照走向我們設定前后±、左右±、上下±三維的變化,預設點云前后、左右、上下三維閾值范圍為,∈[min,max],其中min為點云集內點云前后、左右、上下最小值,max點云集內點云前后、左右、上下最大值。通過∈[min,max]將點云集合內有效點云進行確定,然后在該三維范圍內分別對、、在同一坐標的前后、左右、上下計算其平均值A、A、A,在該點云集合內按照A、A、A結合實際物體走向生成一個較薄的點云層,該點云層經過處理后的“薄”點云,去除了噪點,掃描點云更接近掃描真實結構。通過以上操作實現了噪點的有效處理,獲取了較好點云模型,如圖7所示去噪前后對比圖,圖(a)為去噪前較厚的點云,圖(b)為去噪后較薄的點云。
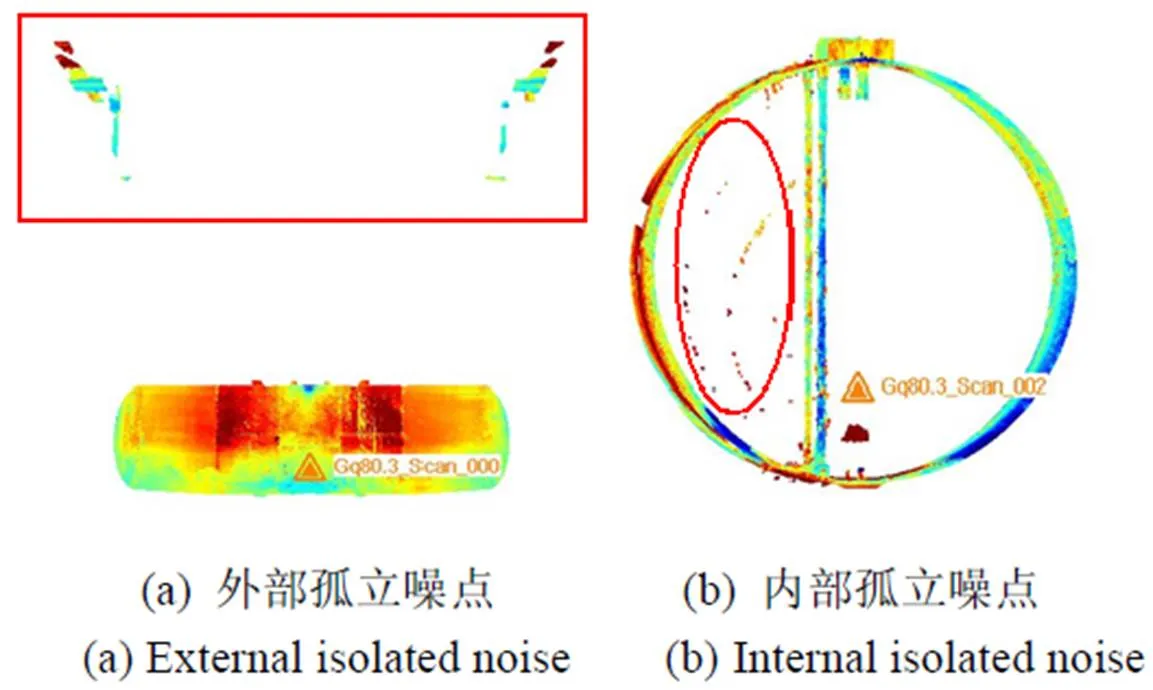
圖6 存在噪點的點云
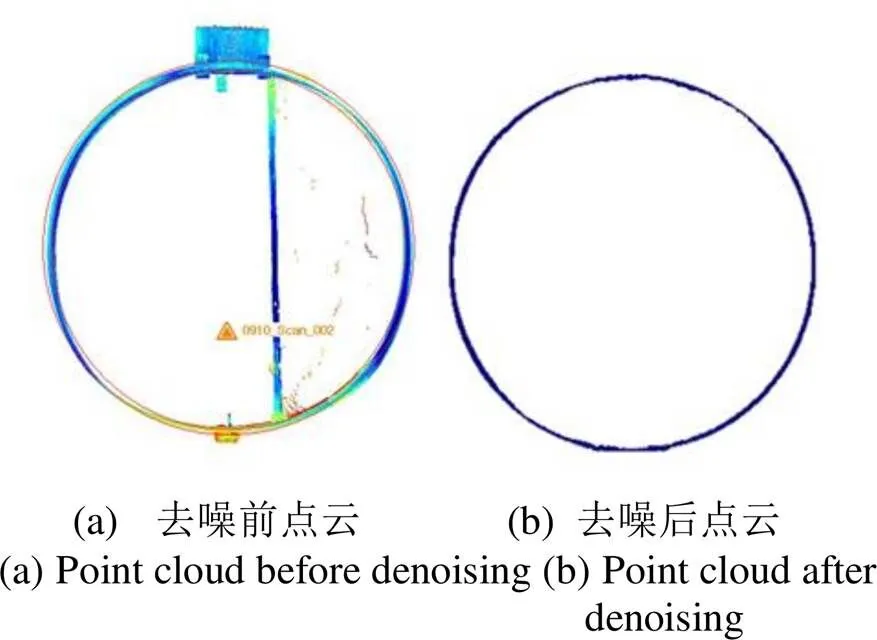
圖7 噪點比較圖
4 試驗
通過對同一掃描對象進行比較試驗,圖8為采用正置掃描后采集的點云圖,掃描過程移站5次。圖9為采用倒置掃描后采集到的點云圖,掃描過程中確定好三腳架倒置的位置,然后將中軸長度調整為1.2m,滿足入射角35°的要求。掃描獲取點云后,采用新方法進行點云噪點處理,最終得到處理好的點云圖。通過試驗比較發現,在點云采集階段,正置掃描需要移站5次,需要尋找特征對象,耗時45min。倒置掃描僅需掃描1站,用時4min。相比較可知,正置掃描工作量是倒置掃描的5倍、耗時11倍。在點云處理方面,正置掃描需要拼站且點云數據量龐大,通用軟件處理耗時約50min,對于噪點處理需要大量的人工處理且效果不理想,最終的點云圖與實際結構誤差大,而采用倒置掃描軟件技術,點云無需拼接,點云量小,處理速度快,自動高效去除噪點,最終的點云圖效果較好且與實際結構誤差小。
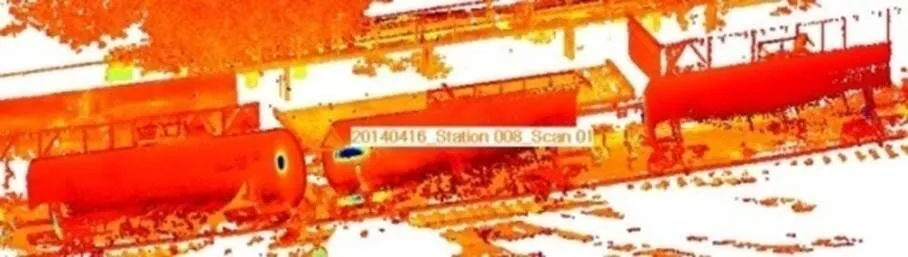
圖8 正置掃描點云圖
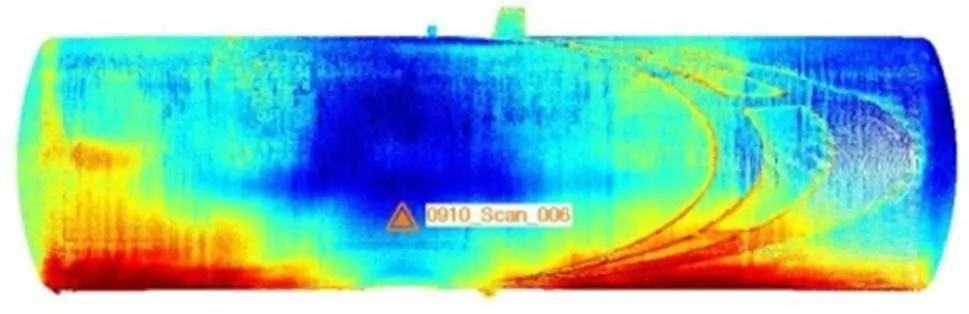
圖9 倒置掃描點云圖
采用倒置掃描技術處理后的點云效果如圖10所示,點云效果較好,為后續計算奠定較好的基礎。
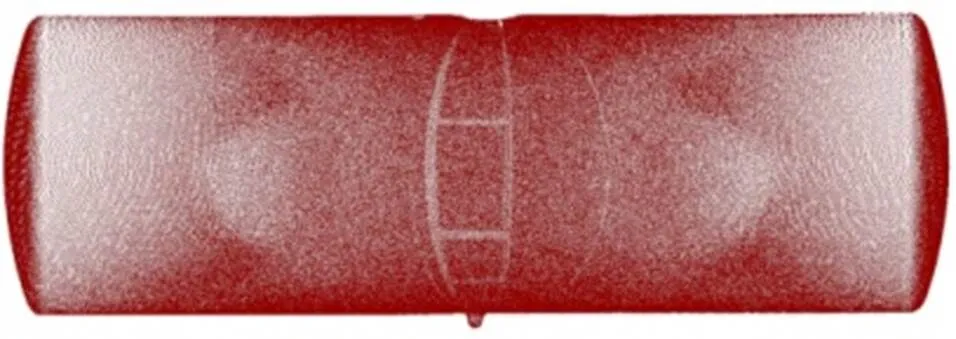
圖10 去噪后的點云圖
5 結論
通過研究三維激光倒置掃描硬件、軟件關鍵技術,較好實現了三維激光準確、快速倒置掃描,試驗表明采集點云數據質量較高,可自動高效去除噪點,極大地降低了現場工作強度,提高了工作效率,促進了三維激光掃描技術的推廣應用,為紅外技術在數據采集和降噪等方面提供借鑒,具有較好的技術價值和經濟意義。
[1] 國家市場監督管理總局. 鐵路罐車和罐式集裝箱容積三維激光掃描儀校準規范[S]. JJF1719-2018: 北京: 中國質檢出版社, 2019.
State Administration of market supervision. Calibration Specification for 3D Laser Scanner for Volume Measurements of Rail Tankers and Tank Containers[S]. JJF1719-2018: Beiing: China Quality Inspection Press, 2019.
[2] 白漢學. 三維激光掃描儀伺服控制系統與數據采集系統的設計與實現[D]. 西安: 西北工業大學, 2003: 66-92.
BAI Hanxue. Design and Implementation of Servo Control and Date Acquire System for 3D Laser Scanner[D]. Xi’an: Northwestern Polytechnical University, 2003: 66-92.
[3] 蔡寬. 基于點云的三維重建技術研究[D]. 哈爾濱: 哈爾濱工業大學, 2010.
CAI Kuan. Research on 3D Reconstruction Technology Based on Point Cloud[D]. Dissertation of Harbin Institute of Technology, 2010: 38-86.
[4] 傅青喜. 鐵路罐車容積檢定與計量[M]. 北京: 中國計量出版社, 2005:9-29.
FU Qingxi. Volume Verification and Measurement of Railway Tank Car. Beijing: China Metrology Publishing, 2005: 9-29.
[5] 邵學君. 鐵路罐車(箱)容積三維激光掃描測量方法[J]. 中國鐵道科學, 2014(2): 79-85.
SHAO Xuejun. Three-dimensional laser scanning method for volume measurement of railway tank car (box) [J]., 2014 (2): 79-85.
[6] 孫君頂, 趙慧慧. 圖像稀疏表示及其在圖像處理中的應用[J].紅外技術, 2014(7): 533-537.
SUN Junding, ZHAO Huihui. Sparse representation and applications in image processing[J]., 2014(7): 533-537.
[7] 汪開理. 三維激光點云與全景影像匹配融合方法[J]. 測繪通報, 2013(12): 131-132.
WANG Kaili. A method of matching and fusion of 3D laser point cloud and panoramic image [J]., 2013 (12): 131-132.
[8] Behzad V Farahani, Francisco Barros, Mihai A Popescu, et al. Geometry acquisition and 3D modelling of a wind tower using a 3D laser scanning technology[J]., 2019(9): 712-717.
[9] 張靖, 周明全, 張雨禾, 等. 基于馬爾可夫隨機場的散亂點云全局特征提取[J]. 自動化學報, 2013(12): 131-132.
ZHANG Jing, ZHOU Mingquan, ZHANG Yuhe, et al. Global feature extraction of scattered point cloud based on Markov random field[J]., 2013 (12): 131-132.
[10] 張志鵬. 基于鐵路罐車(箱)容積三維激光回波強度D模型的入射角特性研究[J]. 應用激光, 2017(4): 609-613.
ZHANG Zhipeng. Study on the geometric characters of D-model of the 3D laser scanning [J]., 2017(4): 609-613.
[11] 畢超, 劉京亮, 劉飛, 等. 激光測頭的光束空間矢量標定方法[J]. 紅外與激光工程, 2015(12): 3775-3777.
BI Chao, LIU Jingliang, LIU Fei, et al. Calibration method of space vector of beam for point laser sensor[J]., 2015(12): 3775-3777.
[12] Bruno Silva Marció, Philipp Nienheysen, Daniel Habor, et al. Quality assessment and deviation analysis of three-dimensional geometrical characterization of a metal pipeline by pulse-echo ultrasonic and laser scanning techniques[J]., 2019(10): 30-37.
[13] 謝雄耀, 盧曉智, 田海洋, 等. 基于地面三維激光掃描技術的隧道全斷面變形測量方法[J]. 測繪通報, 2016(2): 143-144.
XIE Xiongyao, LU Xiaozhi, TIAN Haiyang, et al. Development of a modeling method for monitoring tunnel deformation based on terrestrial 3D laser scanning[J]., 2016(2): 143-144.
[14] Siwei Chen, Megan L Walske, Ian J Davies. Rapid mapping and analyzing rock mass discontinuities with 3D terrestrial laser scanning in the underground excavation[J]., 2018(10): 28-35.
[15] Johannes Schauer, Andreas Nüchter. Removing non-static objects from 3D laser scan data[J]., 2018(7): 21-26.
[16] 郭震冬, 黃亮, 顧正東, 等. 三維激光掃描技術在古建筑測量中的應用[J]. 智能城市, 2019(9): 1-2.
GUO Zhendong HUANG liang GU Zhengdong et al. Application of 3D laser scanning technique in ancient building survey[J]., 2019(9): 1-2.
[17] Daniel N?fors, Maja B?rring, Maxime Estienne, et al. Supporting discrete event simulation with 3D laser scanning and value stream mapping: benefits and drawbacks[J]., 2018(7): 1536-1541.
Research on the Key Technology of 3D Laser Inverted Scanning
ZHANG Zhipeng,SHAO Xuejun,PANG Qing
(,100081,)
The key technologies of 3D laser inverted scanning are mainly studied through the introduction of conventional 3D laser positive scanning technology. The inverted scanning incident angle technology was researched, and the hardware tripod inverted installation conditions were determined to attain a reasonable scanning incident angle and achieve a good acquisition effect of point clouds. On the software side, the technology of efficient and automatic noise removal was examined to realize the automatic and efficient removal of noise in inverted scanning. Through experimental comparison, the key technology of 3D laser inversion scanning can be used to achieve better inversion scanning and scanning results. Moreover, it can be used to reduce the intensity of work, improve work efficiency, and expand the application field of 3D laser scanning. The application fields of 3D laser scanning technology have expanded, and can be used as a reference in the application of inverted scanning technology, automatic and high-efficiency noise processing technology, and so on. Furthermore, this method provides a reference for infrared technology in image fusion, image information recognition, image noise reduction, and so on.
3D laser, inverted scanning, point clouds, noise point, infrared technology
TP391
A
1001-8891(2021)08-0752-05
2020-07-08;
2021-07-30.
張志鵬(1982 -),男,內蒙古巴盟人,副研究員,碩士,主要從事鐵路三維激光掃描技術研究,E-mail:zhangzp@rails.cn。
中國鐵路總公司科技研究開發計劃重點項目(2016D001-C)。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
中老年保健(2021年12期)2021-11-30 02:58:01
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
汽車工程學報(2017年2期)2017-07-05 08:13:02
Coco薇(2016年8期)2016-10-09 02:11:50
