CJ1飛行訓練設備操縱系統故障淺析
2021-08-31 02:14:25李會茹
航空維修與工程 2021年4期
摘要:操縱系統是飛行模擬訓練設備的重要組成部分,本文介紹了CJ1飛行模擬訓練器操縱系統的組成、工作原理和控制法則,最后以CJ1飛行模擬訓練器的左側方向舵卡阻故障為例,介紹了典型的操縱故障的排除方法,故障排除后進行方向舵的QTG測試。測試結果表明,左側方向舵故障得到了解決,滿足飛行要求。
關鍵詞:飛行模擬訓練器;操縱系統;方向舵卡阻;QTG測試
Keywords:flight simulation;control loading system;rudder jamming;QTG test
0 引言
飛行訓練設備一般由模擬艙、運動系統、視景系統、計算機系統、操縱系統及教員控制臺六大系統組成。其中操縱系統是安裝在駕駛艙中,通過連桿等與飛機的執行機構(駕駛盤、駕駛桿、腳蹬等)連接,用來模擬飛行桿力、腳蹬力等的駕駛艙力操作與反饋的系統。先進的操縱系統能夠使飛行員感知到與真實駕駛艙一樣大小的力反饋,因此可仿真飛機在不同飛行狀態下的力、阻尼特性等[1-3]。
飛行訓練設備上將飛機操縱系統分為主操縱系統和輔助操縱系統[4]。主操縱一般為主要的控制,輔助操縱一般為較次要的控制。根據模擬機機型的不同,主操縱系統和輔助操縱系統的分類也不同。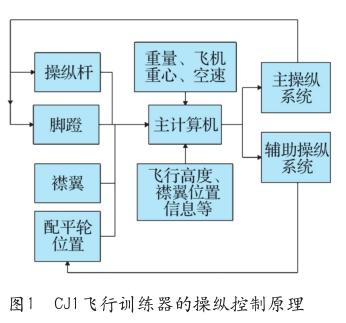
1 操縱系統的組成
在CJ1飛行訓練器上,飛行員通過操縱訓練設備的腳蹬、操縱桿、襟翼和配平輪位置,產生作用力或者位置信息。模擬設備將這種作用信息作為輸入信號,輸入到主計算機(SimHost),主計算機再將采集的信號與飛機當前的重量、飛機重心、空速、飛行高度、襟翼位置信息等進行綜合處理分析,計算出輸出信號,傳輸給主操縱計算機和輔助操縱計算機,主操縱計算機和輔助操縱計算機輸出驅動信號,驅動相應的控制設備作動,以反饋與真實飛機同樣大的力到腳蹬、操縱桿和模擬的飛機舵面,實現對模擬設備的操縱控制。主操縱系統控制俯仰、橫滾和偏航的操作。輔助操縱系統控制俯仰配平輪和襟翼位置指示。在所有模擬環境和模擬時機下,操縱系統必須響應飛行員的操作命令,激活相應的操作執行機構,操縱系統的控制原理見圖1。
1.1 主操縱系統
CJ1飛行訓練設備的主操縱系統,由主操縱控制計算機、3個伺服驅動組件(伺服放大器)、3個操縱控制組件電機及其位置、力傳感器和相應的鉸鏈桿組成。主操縱計算機采用Linux操作系統,安裝有SATA接口的4G內存的SM卡。主操縱計算機有兩個網口,一個網口LAN與主計算機(SimHost)相連,另一網口與交換機相連后,分出三個網線接口,分別連接3個伺服驅動組件,每個伺服驅動組件與操縱控制組件相連,操縱控制組件與其下一級的鉸鏈桿連接。由于操縱系統要實現操縱的精確控制,操縱控制組件CLU將作用力的值和其控制的舵面的位置信息反饋給伺服驅動組件,以更好實現伺服驅動組件對操縱控制組件CLU的控制。具體實現原理見圖2。
1.2 輔助操縱系統
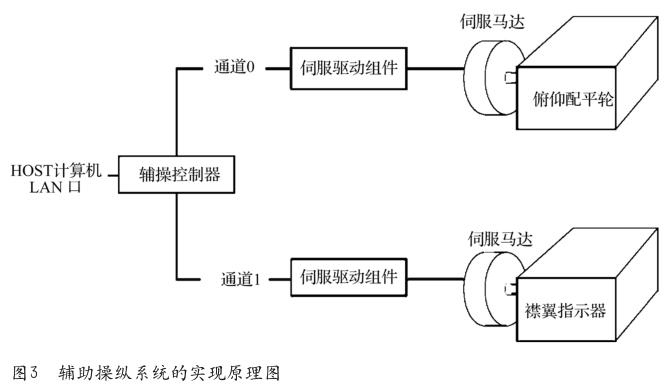
CJ1飛行訓練設備的輔助操縱系統,是飛行員操作的機械控制裝置,由輔助操縱控制器、伺服驅動組件和控制設備組成,如圖3所示。飛行員的操作信號為輸入信號,首先傳遞給控制計算機,輔助操縱控制器為一臺單板機,其接收來自主計算機(HOST)的SimLAN信號、驅動兩個伺服驅動組件,實現對俯仰配平輪和襟翼指示器的控制。見圖3。
2 主操縱系統的控制法則
主操縱系統包含兩條控制法則:內環法則(控制系統的執行機構)和外環法則(模擬機的飛行控制系統)。在正常的系統操作中,一般不會進入內環的控制法則和參數設置。在模型啟動時,內環的控制便被加載。內環的控制數據存儲在操縱計算機的硬盤里,除非機械方面的改變才需要進行內環數據的修改。但遇到操縱數據丟失時,可以在操縱系統的控制軟件(MoogExplorer)中進行數據參數的修改。外環控制主要是外部機械操縱的力與信號的控制,這里重點介紹內環控制的工作原理。
內環控制中的重點是執行機構,執行機構的主要作用是通過記錄飛行員施加到控制系統上的力的大小和位置,在飛行控制操作時產生一個連續的實時穩定的作用力。為了實現這一精準控制,在計算機軟件里將每一個執行機構分成一個單獨的控制通道。每個控制通道由相應的執行機構控制,并單獨工作。在控制軟件里面可以監控主操縱系統三個通道的參數值,并根據實際情況進行參數值的修改。一般可以修改的參數值為伺服放大器的參數值(根據電機/馬達參數值修訂)、力傳感器放大器值(增益、偏移、行程)、位置傳感器放大器值(增益、偏移、行程)、速度傳感器放大器值(增益、偏移、行程)。
執行機構的控制參數集成在操縱計算機軟件內,是一種PID控制器,其分為比例控制通道、積分通道和微分通道三個通道進行偏差調節[6],其中比例控制通道是主控制通道,其輸出與輸入誤差成比例關系,用于減少錯誤的反饋值。積分通道與比例通道一起工作,用于消除靜態誤差。微分控制通道產生相位前置,增加頻率響應。
3 操縱系統的故障排除實例
操縱系統一旦發生故障,將會中斷訓練。同時模擬設備的操縱系統故障也是維護工作中的重點和難點。隨著飛行訓練設備的老化,故障發生概率明顯提高。下面以一起操縱故障為例進行故障排除的闡述。
故障現象:CJ1飛行訓練設備左側方向舵不工作,腳蹬沒有反應。
排故流程:
1)CJ1飛行訓練設備左側方向舵屬于主操縱系統,首先查看操縱控制軟件,沒有發現故障信息提示,見圖4。
2)檢查與左側方向舵相連接的執行機構有無連接松動或斷開的情況。由于飛行訓練設備長期帶運動飛行,其六自由度的運動強度大,持續時間長,難免會引起連接線路(機構)的松動或者斷開。對照維護手冊,找到左側方向舵的控制機構,通過目視檢查機械連接,并緊固。
3)通過萬用表檢查連接電路。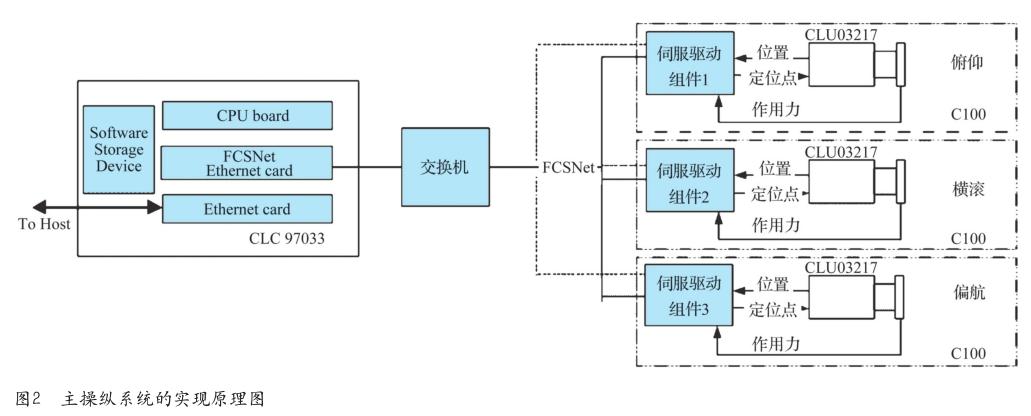
4)檢查確保機械和電路連接正常后,故障依舊存在。
5)打開控制軟件,一邊操縱左右兩側方向舵,一邊查看左右側方向舵的實時數據值。發現在操作左側方向舵時,其MeasutedForce的輸出值在2~5之間,而操作右側方向舵時,其右側方向舵MeasutedForce值為-51左右。根據以往的維修經驗,懷疑是伺服放大器或者是電機故障。
6)對伺服放大器和電機進行更換后故障依舊。
7)連接維護筆記本電腦到座艙,左右腳踩下方向舵,左側方向舵變化幅度小,右側方向舵變化幅度正常。分析操縱系統的控制法則,懷疑是內環的控制數據值丟失,嘗試對內環控制數據值進行更改。
8)在FCS軟件中修改MeasureForce的GAIN增益值,本身為1,現逐漸調整增加到38。在調試值得過程中,一邊修改增益值的大小,一邊操作腳蹬操作檢查力的反饋。直至測試正常,其修改工作頁面見圖5。
9)在教員操縱臺上,進行方向舵QTG測試項目,其測試的目的是自動檢測在方向舵上施加不同的力,其產生的位置變化量是否與主QTG測試包線基本一致,只有測試值與主QTG包線基本一致,才能保證CJ1飛行訓練設備的正常適航運行,如圖6所示。
方向舵故障停機維修中,其開始遵循了傳統的排故方式,通過檢查控制軟件沒有故障提示,然后對機械結構、電路連接進行查看,確保機械和電路連接正常后,懷疑是電機或者是伺服放大器故障,對電機和伺服放大器進行更換,故障依舊。通過仔細觀察研究,分析其工作原理,發現伺服放大器力傳感器存儲放大倍數丟失,通過在FCS-EXPLORER中重新設置放大系數,排除了故障,使飛行訓練快速恢復。
4 總結
操縱系統維護是模擬設備維護工作中的重要內容,保證操縱系統的工作正常是保證飛行訓練的關鍵。本文所舉排故案例中,通過對內環控制數據值重新設定完成了此次故障的排除,積累了十分寶貴的維修經驗。此內環控制數據丟失故障發生概率低,需要有一定維護經驗才能迅速判斷。因此。此排故經驗可為以后的故障排除提供指導性的意見,提高維護效率,減少系統宕機時間。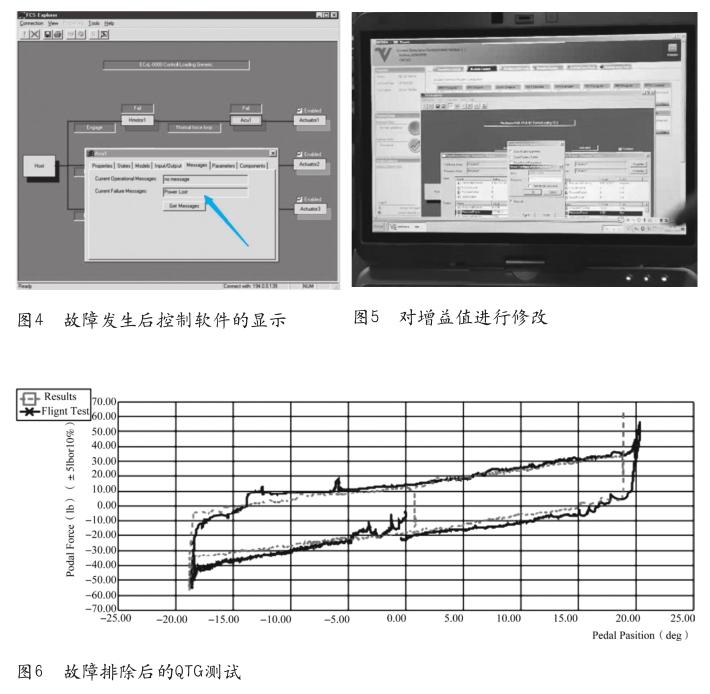
參考文獻
[1] 肖志堅. CJ1飛行模擬器運動系統與故障分析指針式儀表研制[J]. 機電技術,2013(10):8-10.
[2] 陳又軍,蘇斌. 民用飛行模擬技術與應用[M].成都:西南交通大學出版社. 2020.
[3] 陳又軍. 現代飛行模擬機技術發展概述[J].中國民航飛行學院學報,2011,22(2):25-27.
[4] Maintenance manual CJ1 FFT for CAFUC [Z]. Mechtronix. 2013.
[5] Maintenance manual Control Loading. 2013.
[6] PID control system analysis,design,and technology [J]. IEEE Trans Control Systems Technology. University of Glasgow CAutoD. 2005.
作者簡介
李會茹,工程師,研究方向:模擬機維護與仿真。