多星敏感器協(xié)同觀測(cè)的短弧關(guān)聯(lián)算法
2021-09-02 06:27:36黃秋實(shí)張雅聲
西安電子科技大學(xué)學(xué)報(bào) 2021年4期
關(guān)鍵詞:關(guān)聯(lián)
黃秋實(shí),張雅聲,馮 飛
(1.航天工程大學(xué) 航天指揮學(xué)院,北京 101400;2.中國(guó)人民解放軍61646部隊(duì),北京 100085)
隨著航天器和空間碎片的增加,日益擁擠的空間環(huán)境成為各國(guó)爭(zhēng)相搶奪的寶貴戰(zhàn)略資源,其中地球同步軌道(GEosynchronous Orbit,GEO)的衛(wèi)星往往承擔(dān)著通信、導(dǎo)彈預(yù)警、數(shù)據(jù)中繼、廣播等重要任務(wù),具有極高的戰(zhàn)略價(jià)值[1]。對(duì)地球同步軌道目標(biāo)的監(jiān)視是空間態(tài)勢(shì)感知的重要一環(huán),關(guān)系著國(guó)家的太空安全。目前,中國(guó)對(duì)地球同步軌道目標(biāo)的探測(cè)及監(jiān)視主要依賴于地基光學(xué)監(jiān)視系統(tǒng)[2],地基監(jiān)視系統(tǒng)工作會(huì)受到大氣及氣象條件的影響,無(wú)法全天時(shí)觀測(cè),特別是由于地理和政治因素,中國(guó)不具備美國(guó)的全球布站條件。相比于地基觀測(cè),天基監(jiān)視系統(tǒng)不受大氣、地理位置的制約,具有觀測(cè)距離遠(yuǎn)、設(shè)備復(fù)雜度低、功耗小等優(yōu)勢(shì)[3]。美國(guó)以光學(xué)衛(wèi)星組網(wǎng)構(gòu)建天基空間目標(biāo)監(jiān)視系統(tǒng)(Space-Based Surveillance System,SBSS)[4],耗資巨大。中國(guó)的天基目標(biāo)監(jiān)視系統(tǒng)有待發(fā)展。基于星敏感器的空間目標(biāo)泛在感知即挖掘星敏感器在定姿任務(wù)中拍攝的空間目標(biāo)信息,利用在軌衛(wèi)星數(shù)量多、星敏感器資源豐富的優(yōu)勢(shì),在完成星敏感器定姿任務(wù)的同時(shí)實(shí)現(xiàn)對(duì)空間目標(biāo)的監(jiān)視[5],可節(jié)約發(fā)射專用監(jiān)視衛(wèi)星組網(wǎng)的高昂成本。

圖1 多星敏感器協(xié)同觀測(cè)模型
星敏感器是一種高精度的衛(wèi)星姿態(tài)傳感器,同時(shí)具備光學(xué)元件。根據(jù)存儲(chǔ)的星表匹配星圖中的恒星,進(jìn)而確定衛(wèi)星的三軸姿態(tài),定姿精度可達(dá)1″~3″。目前星敏感器僅作為姿態(tài)傳感器應(yīng)用于航天器。由于星敏感器不同于專用監(jiān)視衛(wèi)星,其固連安裝在衛(wèi)星本體無(wú)法主動(dòng)跟蹤目標(biāo),但勢(shì)必存在多顆星敏感器視場(chǎng)交疊的時(shí)刻。此時(shí),視場(chǎng)中出現(xiàn)的空間目標(biāo)處于多星敏感器的同步觀測(cè)下,如圖1所示。
文獻(xiàn)[5]提出一種基于星敏感器的空間目標(biāo)監(jiān)視網(wǎng)絡(luò)構(gòu)型,并通過(guò)仿真驗(yàn)證了多星敏感器同步觀測(cè)空間目標(biāo)的可行性。文獻(xiàn)[6]提出一種基于星敏感器僅測(cè)角數(shù)據(jù)的空間目標(biāo)定軌方法,該方法的前提是對(duì)多星敏感器在相同或不同時(shí)刻拍攝的空間目標(biāo)進(jìn)行關(guān)聯(lián),將相同目標(biāo)的測(cè)角信息用于后續(xù)計(jì)算。當(dāng)前初始軌道的確定方法(比如改進(jìn)拉普拉斯方法)至少需要 3 min的連續(xù)測(cè)角數(shù)據(jù)方能定出較為精確的軌道。由于太空環(huán)境的復(fù)雜性,空間目標(biāo)的觀測(cè)受到光照、遮擋、噪聲等條件制約,將連續(xù)觀測(cè)時(shí)長(zhǎng)不足以確定空間目標(biāo)初始軌道的航跡段稱為短弧,其觀測(cè)時(shí)長(zhǎng)一般小于180 s。
文獻(xiàn)[7]中提出一種自適應(yīng)中值濾波方法,能夠較為有效地去除星圖中的椒鹽噪聲,并依據(jù)運(yùn)動(dòng)補(bǔ)償算法對(duì)星圖中的空間目標(biāo)、噪點(diǎn)、恒星進(jìn)行區(qū)分,提取空間目標(biāo)的質(zhì)心坐標(biāo)。文獻(xiàn)[8]中根據(jù)同一時(shí)刻下多星敏感器協(xié)同觀測(cè)幾何構(gòu)型與多目視覺(jué)類似,利用對(duì)極幾何原理實(shí)現(xiàn)空間目標(biāo)的同步關(guān)聯(lián),在考慮星敏感器的抖動(dòng)、測(cè)角測(cè)距誤差、噪聲的基礎(chǔ)上,關(guān)聯(lián)準(zhǔn)確率可達(dá)90%。依據(jù)關(guān)聯(lián)結(jié)果,通過(guò)最小二乘法來(lái)求解空間目標(biāo)的坐標(biāo)。文獻(xiàn)[9]能夠以改進(jìn)拉普拉斯方法確定初始軌道的航跡,利用模糊關(guān)聯(lián)原理實(shí)現(xiàn)中斷航跡間的關(guān)聯(lián)。文獻(xiàn)[10]提出一種基于正弦擬合的空間目標(biāo)關(guān)聯(lián)方法,可區(qū)分來(lái)自不同軌道的空間目標(biāo),但是航跡間隔超過(guò)3 h時(shí)關(guān)聯(lián)準(zhǔn)確率不高,對(duì)非地球同步軌道關(guān)聯(lián)效果并不好。
為解決光學(xué)測(cè)量短弧段的初始軌道估計(jì)問(wèn)題,MILANI等[11]提出了容許域的概念,將空間目標(biāo)按約束條件限制在由測(cè)量斜距、斜距變化率構(gòu)成的二維平面內(nèi),平面中的每一點(diǎn)可代表一條軌道。文獻(xiàn)[12]通過(guò)對(duì)容許域進(jìn)行剖分,將其網(wǎng)格化,再?gòu)挠邢薜木W(wǎng)格節(jié)點(diǎn)搜索出目標(biāo)初始軌道,進(jìn)行目標(biāo)關(guān)聯(lián)。該方法有一些明顯的缺陷:容許域的約束條件較為寬松,搜索初始軌道過(guò)程繁瑣;在進(jìn)行多對(duì)多的空間目標(biāo)關(guān)聯(lián)時(shí),軌道外推環(huán)節(jié)導(dǎo)致算法復(fù)雜度較高,運(yùn)行時(shí)間長(zhǎng);在噪聲下空間目標(biāo)關(guān)聯(lián)的準(zhǔn)確率較低[12-13]。
筆者以上述研究為基礎(chǔ),提出一種基于假設(shè)邊值的空間目標(biāo)短弧關(guān)聯(lián)算法,不僅關(guān)聯(lián)準(zhǔn)確率更高,而且能適用于多種軌道類型的航跡關(guān)聯(lián)。利用文獻(xiàn)[8]中的空間目標(biāo)同步關(guān)聯(lián)方法及多星敏感器聯(lián)合定位算法,將僅測(cè)角數(shù)據(jù)轉(zhuǎn)換成觀測(cè)目標(biāo)的空間坐標(biāo),并假設(shè)新舊航跡關(guān)聯(lián)的所有情況,從新舊航跡中各取觀測(cè)點(diǎn)作為邊值,求解假設(shè)邊值條件下的目標(biāo)軌道,再以馬氏距離衡量假設(shè)條件下的軌道與實(shí)際觀測(cè)的相似程度,最終從可能關(guān)聯(lián)的閾值中選擇最優(yōu)關(guān)聯(lián)結(jié)果。
1 基于假設(shè)邊值的空間目標(biāo)短弧關(guān)聯(lián)算法
將間隔一定時(shí)長(zhǎng)的航跡片段進(jìn)行關(guān)聯(lián),先觀測(cè)的航跡定義為舊航跡,后觀測(cè)的航跡定義為新航跡。算法步驟如下:
(1) 獲取m條舊航跡與n條新航跡在J2000坐標(biāo)系下的位置坐標(biāo)。
(2) 構(gòu)造m×n的矩陣,其中元素代表以對(duì)應(yīng)舊航跡一點(diǎn)為起點(diǎn)、新航跡一點(diǎn)為終點(diǎn)作為邊界確定的軌道。
(3) 計(jì)算基于假設(shè)邊值確定的軌道與相應(yīng)新舊航跡觀測(cè)值之間的馬氏距離。
(4) 選擇合適的閾值,小于閾值則接受關(guān)聯(lián)假設(shè),相應(yīng)新舊航跡進(jìn)行預(yù)關(guān)聯(lián);大于閾值則拒絕假設(shè),相應(yīng)新舊航跡不關(guān)聯(lián)。
(5) 進(jìn)行關(guān)聯(lián)多義性處理,僅選擇相似度最高的航跡組合關(guān)聯(lián),保證每條航跡最多與一條其他航跡關(guān)聯(lián)。
上述步驟涉及空間目標(biāo)的同步關(guān)聯(lián)、多星敏感器協(xié)同定位、蘭勃特定軌問(wèn)題求解、基于馬氏距離與卡方檢驗(yàn)的關(guān)聯(lián)判定,基本原理如下。
1.1 基于對(duì)極幾何的空間目標(biāo)同步關(guān)聯(lián)方法
在某一時(shí)刻,兩臺(tái)及以上星敏感器的視線自然交匯時(shí),相當(dāng)于對(duì)重疊視野內(nèi)的目標(biāo)進(jìn)行多角度的觀測(cè)。由于空間目標(biāo)距離星敏感器達(dá)數(shù)萬(wàn)公里,因此星圖上的空間目標(biāo)成像與恒星類似,為不具備細(xì)節(jié)特征的亮點(diǎn)。對(duì)極幾何描述的是兩視圖內(nèi)在的射影關(guān)系。當(dāng)目標(biāo)較遠(yuǎn)時(shí),將目標(biāo)抽象為一點(diǎn),該點(diǎn)在兩個(gè)不同視角下像的坐標(biāo)存在約束關(guān)系[8]:
(1)
式(1)為對(duì)極幾何約束,p1和p2代表空間目標(biāo)在星圖上的像素坐標(biāo),第三維補(bǔ)1占位。3階方陣F稱為基礎(chǔ)矩陣:
(2)
(3)
F可根據(jù)相機(jī)標(biāo)定原理求解,如式(2)所示。M1,M2分別代表星敏感器相機(jī)的內(nèi)參矩陣,由式(3)求解。R,S分別代表兩臺(tái)星敏感器的旋轉(zhuǎn)和平移矩陣。星敏感器的相機(jī)參數(shù)已知,星敏感器平臺(tái)定位誤差在百米內(nèi),測(cè)角誤差在2″內(nèi),因此每一時(shí)刻兩臺(tái)星敏感器間基礎(chǔ)矩陣可求解,每一時(shí)刻兩星敏感器拍攝空間目標(biāo)是否關(guān)聯(lián)可判定。
式(3)中,fovx×fovy代表相機(jī)角度,Nx×Ny代表照片分辨率,f代表相機(jī)焦距,dx、dy代表像素的長(zhǎng)度和寬度,u0、v0為主點(diǎn)像素坐標(biāo)。上述變量均已知。
由于存在星圖噪聲、星敏感器抖動(dòng)、測(cè)角測(cè)距誤差,關(guān)聯(lián)坐標(biāo)代入式(1)后結(jié)果并不嚴(yán)格為零。設(shè)定關(guān)聯(lián)閾值ε,某一時(shí)刻坐標(biāo)代入式(1)后結(jié)果小于閾值的目標(biāo)判定為關(guān)聯(lián)。重復(fù)上述過(guò)程,最終整理出所有時(shí)刻下,所有空間目標(biāo)的關(guān)聯(lián)結(jié)果[8]。
1.2 多星敏感器協(xié)同定位求解
當(dāng)同一時(shí)刻多星敏感器下的空間目標(biāo)關(guān)聯(lián)問(wèn)題得到解決時(shí),利用空間目標(biāo)在同一時(shí)刻的多視角觀測(cè),根據(jù)多目視覺(jué)原理可求解空間目標(biāo)的具體位置。本文空間目標(biāo)的坐標(biāo)在J2000坐標(biāo)系中描述。J2000是經(jīng)典的地心慣性坐標(biāo)系,其X軸指向平春分點(diǎn),Z軸指向北天極。空間目標(biāo)位置的確定采用一種基于最小二乘的多星敏感器協(xié)同定位方法[8]。

(4)
方向向量與赤經(jīng)赤緯轉(zhuǎn)換關(guān)系為
(5)
(6)
(7)
為求解未知量r(x,y,z),將其寫(xiě)成線性方程組的形式,為
A·X=b,
(8)
其中,
上述3N個(gè)方程中2N個(gè)相互獨(dú)立。求解3個(gè)未知量,最少需兩個(gè)星敏感器觀測(cè)才可求解。當(dāng)N>2時(shí),其解為
X=(ATA)-1ATb。
(9)
1.3 基于假設(shè)邊界的蘭勃特問(wèn)題求解
經(jīng)上述過(guò)程,待關(guān)聯(lián)空間目標(biāo)的觀測(cè)數(shù)據(jù)轉(zhuǎn)換成了J2000坐標(biāo)系下的坐標(biāo),且待關(guān)聯(lián)航跡的間隔時(shí)間已知。這是一個(gè)典型的蘭勃特問(wèn)題,即當(dāng)已知空間目標(biāo)起點(diǎn)和終點(diǎn)的位置和運(yùn)行時(shí)間時(shí),可求解起點(diǎn)和終點(diǎn)的運(yùn)行速度,繼而求解空間目標(biāo)的運(yùn)動(dòng)軌道[14]。BATTIN對(duì)此類問(wèn)題進(jìn)行了充分的研究。BATTIN法是求解蘭勃特邊界問(wèn)題的經(jīng)典解法。

圖2 蘭勃特問(wèn)題幾何關(guān)系

圖3 蘭勃特問(wèn)題轉(zhuǎn)換形式
由圖2所示,蘭勃特問(wèn)題中若起始位置ri、終點(diǎn)位置rf確定,飛行時(shí)間是轉(zhuǎn)移軌道半長(zhǎng)軸a的函數(shù),即
t=f(a,ri,rf) 。
(10)
根據(jù)蘭勃特問(wèn)題理論,若轉(zhuǎn)移軌道開(kāi)始和結(jié)束位置p1,p2固定,則|ri|+|rf|和半長(zhǎng)軸在運(yùn)行中不變,轉(zhuǎn)移軌道初始焦點(diǎn)和虛焦點(diǎn)可以不受飛行時(shí)間約束,轉(zhuǎn)移軌道形狀不變。
如圖3所示,轉(zhuǎn)換后軌道p2點(diǎn)的真近點(diǎn)角為
(11)
其中,θ為圖2中ri與rf之間的夾角。
飛行時(shí)間函數(shù)為
(12)
其中,偏心率為e;μ=398 600.44 m3/s2,代表地球引力常數(shù)。根據(jù)式(12),可推導(dǎo)出式(13)~(15):
(13)
(14)
(15)
可通過(guò)迭代方法求解y[15]。最終軌道起始位置的速度vi為
(16)
中間量p為
(17)
1.4 基于馬氏距離與卡方檢驗(yàn)的中斷航跡關(guān)聯(lián)判定
從舊航跡取一點(diǎn)作為起點(diǎn),從新航跡取一點(diǎn)作為終點(diǎn)。若有m條舊航跡,n條新航跡,則共有mn種可能的運(yùn)動(dòng)情況;若舊航跡i與新航跡j屬于同一目標(biāo),則在相同觀測(cè)時(shí)刻,軌道上目標(biāo)的理論位置必與舊航跡i和新航跡j的觀測(cè)值接近,航跡的相似度利用馬氏距離衡量[16]。在觀測(cè)時(shí)刻k,舊航跡i和新航跡j關(guān)聯(lián)理論值與觀測(cè)值的馬氏距離為
(18)
其中,Σ為協(xié)方差矩陣,可根據(jù)星敏感器的誤差獲得。
求出N個(gè)觀測(cè)時(shí)刻的馬氏距離,并求均值:
(19)
由于可能存在某條新航跡無(wú)法與任意一條舊航跡關(guān)聯(lián)的情況,因此設(shè)置門(mén)限d。當(dāng)新舊航跡平均馬氏距離大于d,則判定為相應(yīng)新舊航跡不關(guān)聯(lián)。門(mén)限d的選取參考χ2檢驗(yàn)法[17]。空間目標(biāo)坐標(biāo)為三維,應(yīng)服從三自由度的卡方分布。顯著性水平α=0.01,門(mén)限d=11.344。
對(duì)任一條航跡,從其滿足門(mén)限d的所有候選關(guān)聯(lián)航跡中選擇平均馬氏距離最小的航跡判定為關(guān)聯(lián),并保證每條航跡至多有一條關(guān)聯(lián)航跡。
2 仿真校驗(yàn)
2.1 多星敏感器協(xié)同定位精度仿真
利用衛(wèi)星工具包(Satellite Tool Kit,STK)平臺(tái)構(gòu)建觀測(cè)模型。觀測(cè)平臺(tái)位于太陽(yáng)同步軌道,軌道參數(shù)參考美國(guó)優(yōu)思科學(xué)家聯(lián)盟的觀測(cè)數(shù)據(jù)。觀測(cè)平臺(tái)的軌道傾角范圍為96.8°~98.5°,軌道半長(zhǎng)軸為6 778.14 km,偏心率為0,每個(gè)平臺(tái)正交安裝兩臺(tái)視場(chǎng)為2°×2°的星敏感器。觀測(cè)目標(biāo)位于軌道半長(zhǎng)軸為42 126.1~42 805.9 km的地球同步軌道,軌道傾角為0°~2°。共進(jìn)行了200次地球同步軌道目標(biāo)的協(xié)同定位,計(jì)算了空間目標(biāo)定位坐標(biāo)與實(shí)際坐標(biāo)的誤差。為模擬任務(wù)中星敏感器定姿誤差及平臺(tái)自身的位置誤差,對(duì)測(cè)角、測(cè)距數(shù)據(jù)加入噪聲。仿真中設(shè)置了3種噪聲水平,(a″,b)意味著對(duì)星敏感器的測(cè)角數(shù)據(jù)加入均值為零、標(biāo)準(zhǔn)差為a″的高斯白噪聲,對(duì)星敏感器的位置矢量加入均值為零、標(biāo)準(zhǔn)差為b的高斯白噪聲。圖4反映了200次計(jì)算中空間目標(biāo)在X,Y,Z軸的定位誤差情況。

(a) X軸誤差

(b) Y軸誤差

(c) Z軸誤差
三軸定位誤差的標(biāo)準(zhǔn)差如表1所示。當(dāng)噪聲(1″,100 m)增大到(2″,100 m)時(shí),定位誤差改變了0.922 3 km;當(dāng)噪聲(2″,100 m)時(shí)增大到(2″,1 000 m)時(shí),定位誤差僅改變了0.794 4 km。測(cè)角誤差多1″,就會(huì)對(duì)定位結(jié)果產(chǎn)生明顯的影響。可見(jiàn)協(xié)同定位算法對(duì)測(cè)角誤差更為敏感。星敏感器測(cè)角越準(zhǔn),定位精度越高,后續(xù)關(guān)聯(lián)效果將越好。

表1 三軸定位誤差的標(biāo)準(zhǔn)差
2.2 空間目標(biāo)短弧關(guān)聯(lián)仿真
采用實(shí)測(cè)數(shù)據(jù)與仿真相結(jié)合的研究方法,將真實(shí)的地球同步軌道數(shù)據(jù)導(dǎo)入衛(wèi)星工具包。軌道半長(zhǎng)軸為42 126.1~42 805.9 km,軌道傾角為0°~2°。圖5為2019年12月1日0時(shí)在軌533個(gè)地球同步軌道目標(biāo)在J2000坐標(biāo)系下的分布密度圖,縱軸代表1°×1°區(qū)域內(nèi)空間目標(biāo)個(gè)數(shù)。可知目標(biāo)在中國(guó)、俄羅斯、美國(guó)的上空較為密集。據(jù)統(tǒng)計(jì),大多數(shù)地球同步軌道目標(biāo)分布的赤道緯度接近于0°,且都為近圓軌道,最大偏心率為0.075,其中80%目標(biāo)的軌道傾角小于1°。
仿真中觀測(cè)平臺(tái)建立在傾角范圍為96.8°~98.5°、軌道半長(zhǎng)軸為6778.14 km、偏心率為0的30個(gè)太陽(yáng)同步軌道上,每個(gè)平臺(tái)正交安裝兩臺(tái)視場(chǎng)為2°×2°的星敏感器,組成空間目標(biāo)監(jiān)視網(wǎng)。利用衛(wèi)星工具包平臺(tái)獲取連續(xù)時(shí)刻及對(duì)應(yīng)時(shí)刻坐標(biāo)作為航跡數(shù)據(jù)。根據(jù)節(jié)2.1的結(jié)果對(duì)航跡坐標(biāo)添加噪聲,每組噪聲下共進(jìn)行了500次的關(guān)聯(lián)仿真。定義觀測(cè)時(shí)長(zhǎng)180 s以下的弧段為短弧。為著重突出短弧關(guān)聯(lián)效果,選擇觀測(cè)時(shí)長(zhǎng)為50~120 s的航跡數(shù)據(jù)進(jìn)行關(guān)聯(lián)。一般空間目標(biāo)的重訪時(shí)間為20~50 min,可關(guān)聯(lián)的航跡間隔時(shí)間越長(zhǎng),數(shù)據(jù)的利用率越高。仿真中最大間隔時(shí)間為10 h,可滿足絕大部分的中斷航跡關(guān)聯(lián)需求。在雙核Intel 2.5 GHz的MacBook pro上,采用Matlab2018a版本進(jìn)行航跡關(guān)聯(lián)仿真。
關(guān)聯(lián)性能由真正類(True Positive,TP)、真負(fù)類(True Negative,TN)、假正類(False Positive,F(xiàn)P)、假負(fù)類(False Negative,F(xiàn)N)4個(gè)量來(lái)描述,TP指正確關(guān)聯(lián)相同目標(biāo),TN指正確拒絕不同目標(biāo),F(xiàn)P為誤關(guān)聯(lián)不同目標(biāo),F(xiàn)N指漏關(guān)聯(lián)相同目標(biāo)。圖6所示為基于假設(shè)邊值的關(guān)聯(lián)算法在不同噪聲條件下的關(guān)聯(lián)正確率。隨著間隔時(shí)間增加,關(guān)聯(lián)準(zhǔn)確率呈下降趨勢(shì)。根據(jù)現(xiàn)有星敏感器的性能,測(cè)角誤差為2″、位置誤差為100 m的噪聲更符合工程應(yīng)用實(shí)際。參考三角記號(hào)折線,航跡間隔10 h,關(guān)聯(lián)準(zhǔn)確率達(dá)95%。表2展示了在此噪聲條件下,不同間隔時(shí)間下的具體關(guān)聯(lián)結(jié)果。

圖5 地球同步轉(zhuǎn)道目標(biāo)分布密度圖

圖6 關(guān)聯(lián)準(zhǔn)確率與間隔時(shí)間的關(guān)系

表2 關(guān)聯(lián)結(jié)果統(tǒng)計(jì)
仿真中的關(guān)聯(lián)門(mén)限值d取11.344。若新舊航跡平均馬氏距離大于d,則判定為不相關(guān)航跡。門(mén)限值與關(guān)聯(lián)同一目標(biāo)的概率有關(guān)[18]。門(mén)限值取得過(guò)小,會(huì)將同一目標(biāo)拒絕,造成漏關(guān)聯(lián);門(mén)限值取得過(guò)大,則可能將不同的目標(biāo)誤判為關(guān)聯(lián)。關(guān)聯(lián)同一目標(biāo)概率隨門(mén)限取值變化如圖7所示,曲線先增大后緩慢減小。由于來(lái)自于同一目標(biāo)觀測(cè)數(shù)據(jù)與預(yù)測(cè)數(shù)據(jù)的馬氏距離往往比來(lái)自不同目標(biāo)的馬氏距離小,因此達(dá)到最大關(guān)聯(lián)概率后的下降趨勢(shì)相較于上升趨勢(shì)平緩得多。
圖8為目標(biāo)關(guān)聯(lián)的可視化展示。圖中3個(gè)方塊代表3個(gè)觀測(cè)時(shí)刻,依次間隔為1 h,觀測(cè)目標(biāo)為地球同步軌道目標(biāo),成功關(guān)聯(lián)的目標(biāo)用相同標(biāo)記表示,可知共有4個(gè)地球同步軌道目標(biāo)。地球同步軌道目標(biāo)繞地心運(yùn)動(dòng)的角速度約15°/h,與圖8中地球同步軌道運(yùn)動(dòng)狀態(tài)相吻合。

圖7 關(guān)聯(lián)概率與閾值的關(guān)系
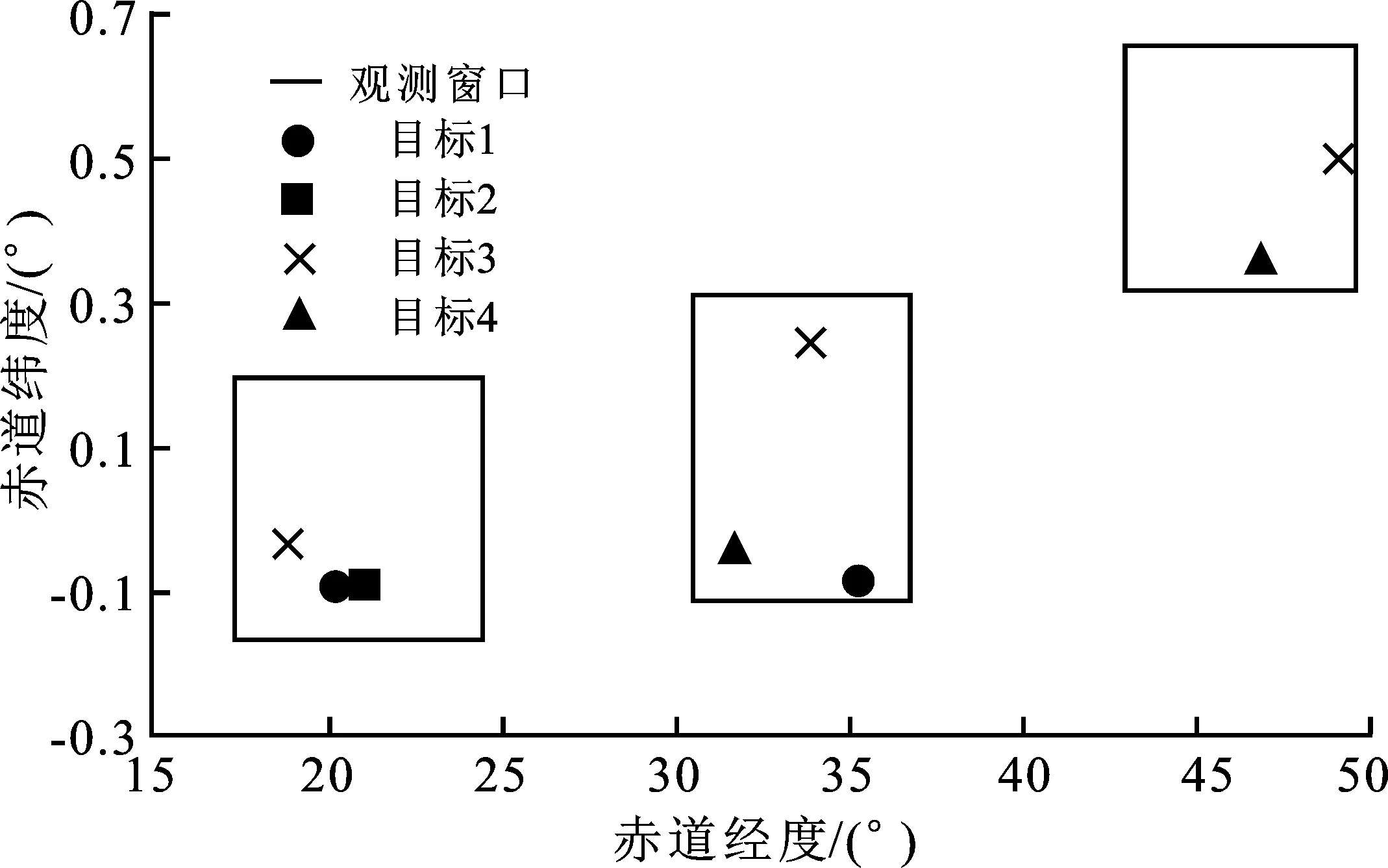
圖8 關(guān)聯(lián)結(jié)果示例
3 短弧關(guān)聯(lián)算法對(duì)比
為測(cè)試基于假設(shè)邊值的航跡關(guān)聯(lián)算法解決短弧關(guān)聯(lián)問(wèn)題的性能,通過(guò)仿真從關(guān)聯(lián)準(zhǔn)確率、運(yùn)行時(shí)間兩個(gè)角度,與基于正弦擬合和基于容許域的短弧關(guān)聯(lián)算法進(jìn)行對(duì)比。容許域算法通過(guò)將目標(biāo)的軌道限制在測(cè)量斜距與斜距變化率的平面的一定范圍內(nèi),以尋找和觀測(cè)值誤差最小的軌道作為初軌,根據(jù)目標(biāo)的半長(zhǎng)軸、軌道傾角等特點(diǎn)可以進(jìn)一步縮小約束范圍。基于正弦擬合的關(guān)聯(lián)算法利用同一軌道的赤道經(jīng)緯度的變化,近似正弦分布的規(guī)律,區(qū)分軌道傾角不同的軌道。仿真中添加噪聲為(2″,100 m)的高斯白噪聲,仿真中的關(guān)聯(lián)閾值d取11.344。3種算法分別對(duì)不同間隔時(shí)間進(jìn)行100次仿真,統(tǒng)計(jì)關(guān)聯(lián)準(zhǔn)確率如圖9所示,并在上述仿真過(guò)程中對(duì)5、10、30、60個(gè)目標(biāo)同時(shí)關(guān)聯(lián)的平均運(yùn)行時(shí)間進(jìn)行計(jì)算,如圖10所示。
基于假設(shè)邊值的短弧關(guān)聯(lián)算法與基于正弦擬合的短弧關(guān)聯(lián)算法[10]利用了多星敏感器同步關(guān)聯(lián)結(jié)果,融合了多星敏感器的同步觀測(cè)數(shù)據(jù),而容許域方法針對(duì)單平臺(tái)僅測(cè)角數(shù)據(jù),因此基于容許域方法的關(guān)聯(lián)準(zhǔn)確率最低,且容許域約束相對(duì)寬松。基于容許域方法對(duì)每個(gè)觀測(cè)目標(biāo)都需要在容許域內(nèi)尋找最優(yōu)初軌,再外推到下一時(shí)刻與后一時(shí)刻的目標(biāo)進(jìn)行關(guān)聯(lián),過(guò)程復(fù)雜,關(guān)聯(lián)時(shí)間也是最長(zhǎng)的。基于正弦擬合的空間目標(biāo)關(guān)聯(lián)算法[10]可以較為便捷地區(qū)分傾角不同的軌道,對(duì)于同軌道不同相位或僅軌道高度不同的空間目標(biāo)需增加額外約束條件,因此難以適應(yīng)多種軌道類型的目標(biāo)關(guān)聯(lián),并且隨關(guān)聯(lián)間隔時(shí)間增加,關(guān)聯(lián)準(zhǔn)確率下降明顯;由于無(wú)須進(jìn)行軌道確定及軌道外推,運(yùn)算最快。基于假設(shè)邊值關(guān)聯(lián)算法的運(yùn)算時(shí)間略高于基于正弦擬合關(guān)聯(lián)算法,但關(guān)聯(lián)準(zhǔn)確率在3種算法中最高;從仿真結(jié)果看,當(dāng)航跡間隔在10 h內(nèi)時(shí),進(jìn)行關(guān)聯(lián)的準(zhǔn)確率均比較高。

圖9 準(zhǔn)確率的對(duì)比
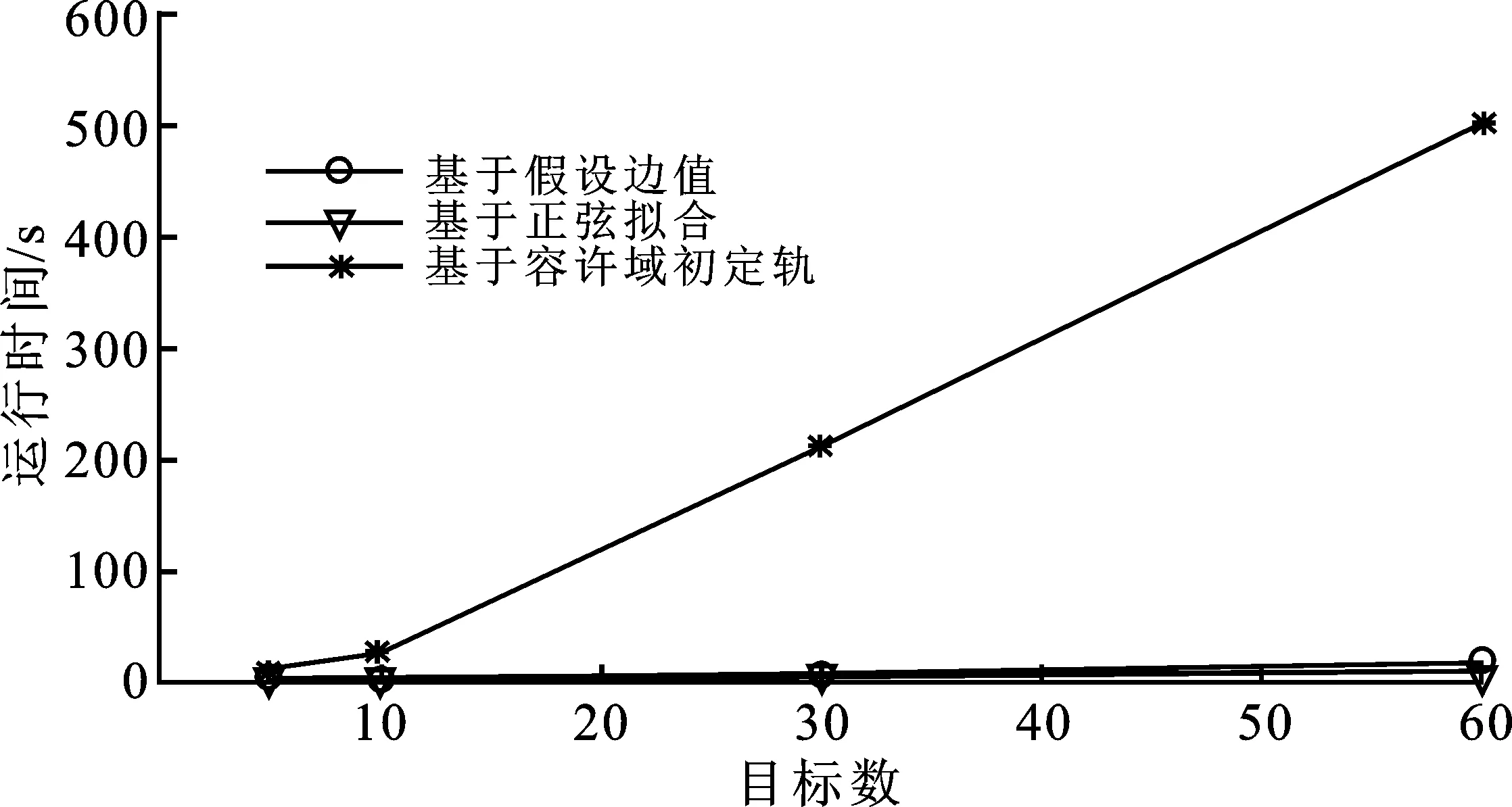
圖10 運(yùn)行時(shí)間對(duì)比
4 結(jié) 論
在多星敏感器觀測(cè)的空間目標(biāo)同步關(guān)聯(lián)結(jié)果基礎(chǔ)上,使用最小二乘方法將相同時(shí)刻多星敏感器觀測(cè)的測(cè)角數(shù)據(jù)融合,解算出各空間目標(biāo)在J2000坐標(biāo)系下的坐標(biāo)。當(dāng)星敏感器位置誤差的標(biāo)準(zhǔn)差為100 m、測(cè)角數(shù)據(jù)誤差的標(biāo)準(zhǔn)差為2″時(shí),空間目標(biāo)定位誤差的標(biāo)準(zhǔn)差為1.977 1 km,足以滿足后續(xù)關(guān)聯(lián)步驟的精度需求。基于假設(shè)邊值和基于正弦擬合關(guān)聯(lián)算法的應(yīng)用前提是需至少兩臺(tái)星敏感器對(duì)空間目標(biāo)進(jìn)行觀測(cè),根據(jù)文獻(xiàn)[5]相關(guān)研究,90%同步軌道帶目標(biāo)可被兩臺(tái)以上星敏感器同步觀測(cè)。
從新舊航跡中各取一點(diǎn)作為邊界,建立所有假設(shè)邊界的集合,計(jì)算出所有假設(shè)邊界條件下空間目標(biāo)軌道的理論值,并利用馬氏距離與卡方檢驗(yàn)作為航跡關(guān)聯(lián)準(zhǔn)則。經(jīng)仿真驗(yàn)證,當(dāng)噪聲為(2″,100 m)的高斯白噪聲時(shí),對(duì)兩組間隔10 h航跡關(guān)聯(lián)的準(zhǔn)確率可達(dá)95%。與其他短弧關(guān)聯(lián)算法相比,基于假設(shè)邊值的航跡關(guān)聯(lián)算法在關(guān)聯(lián)準(zhǔn)確率上具有明顯優(yōu)勢(shì),同時(shí)保持了較快的運(yùn)行速度。
仿真中采用的最短觀測(cè)僅50 s,無(wú)法用常規(guī)軌道確定方法確定初始軌道,符合短弧定義。基于假設(shè)邊值的航跡關(guān)聯(lián)算法實(shí)現(xiàn)了因觀測(cè)弧段過(guò)短無(wú)法確定初軌的航跡關(guān)聯(lián)問(wèn)題,而且算法不僅局限于短弧關(guān)聯(lián),對(duì)一般的航跡關(guān)聯(lián)問(wèn)題同樣適用。若未來(lái)星間鏈路能夠?qū)崿F(xiàn)衛(wèi)星間數(shù)據(jù)共享,則空間目標(biāo)關(guān)聯(lián)的過(guò)程可在衛(wèi)星上實(shí)現(xiàn),無(wú)需再將大量數(shù)據(jù)下傳回地面。由于衛(wèi)星的運(yùn)算資源是有限的,因此算法不宜過(guò)于復(fù)雜。在3種短弧關(guān)聯(lián)算法中,基于假設(shè)邊值的航跡關(guān)聯(lián)算法更有利于實(shí)現(xiàn)星上數(shù)據(jù)處理。
考慮到各平臺(tái)的實(shí)際測(cè)量誤差可能有所不同,后續(xù)將對(duì)不同平臺(tái)的觀測(cè)誤差賦予相應(yīng)的權(quán)重,進(jìn)一步提高空間目標(biāo)的定位精度。目前,工程中星敏感器僅作為姿態(tài)傳感器應(yīng)用,通過(guò)實(shí)測(cè)數(shù)據(jù)與仿真軟件相結(jié)合的手段,可為后續(xù)工程應(yīng)用提供借鑒。隨著新型小視場(chǎng)、高極限星等星敏感器的研發(fā),后續(xù)將在真實(shí)星圖下進(jìn)一步進(jìn)行空間目標(biāo)提取研究。
猜你喜歡
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:30
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當(dāng)代陜西(2019年15期)2019-09-02 01:52:00
中國(guó)非營(yíng)利評(píng)論(2018年2期)2018-06-18 10:48:50
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
自動(dòng)化學(xué)報(bào)(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動(dòng)工程學(xué)報(bào)(2015年1期)2015-03-01 01:15:42
