基于機(jī)器學(xué)習(xí)的電熱防除冰表面溫度變化趨勢(shì)預(yù)測(cè)
2021-09-03 02:53:02冉林熊建軍趙照左承林易賢
裝備環(huán)境工程 2021年8期
關(guān)鍵詞:模型
冉林,熊建軍,趙照,左承林,易賢
(中國(guó)空氣動(dòng)力研究與發(fā)展中心 結(jié)冰與防除冰重點(diǎn)實(shí)驗(yàn)室,四川 綿陽(yáng) 621000)
飛機(jī)電熱防除冰是指利用電加熱方式使飛機(jī)重要部件表面溫度保持高于冰點(diǎn)溫度,以防止部件表面結(jié)冰,或融化與部件接觸的冰界面,進(jìn)而使冰在外力下脫落,避免飛機(jī)氣動(dòng)外形遭到破壞的一種防護(hù)手段[1]。電熱防除冰的周期性加熱方式[2],具有能耗低、利用率高、加熱元件損耗低[3]等優(yōu)點(diǎn),是機(jī)載電加熱系統(tǒng)常采用的工作方式。處于周期通電狀態(tài)的電加熱系統(tǒng),若溫度隨環(huán)境變化呈上升趨勢(shì),加熱元件保持通電就會(huì)產(chǎn)生過(guò)剩的熱量,易造成元件損壞,系統(tǒng)不能正常工作。如果能根據(jù)當(dāng)前狀態(tài),提前得到部件的表面溫度變化趨勢(shì),可有效避免此類危害的發(fā)生。因此,對(duì)電熱防除冰表面溫度變化趨勢(shì)的預(yù)測(cè)有著重要意義。
飛機(jī)電加熱防除冰主要涉及防除冰系統(tǒng)設(shè)計(jì)[4]、電熱防除冰熱載荷計(jì)算[5-6]、防除冰部件材料性能探究[7]等,都是圍繞著對(duì)象的溫度變化來(lái)開(kāi)展,所以對(duì)電熱防除冰部件表面溫度的研究是非常有必要的。文獻(xiàn)[8]運(yùn)用數(shù)值計(jì)算模擬了某電熱防除冰部件供電工作時(shí)的熱流變化,優(yōu)化了電熱系統(tǒng)的功率分布。文獻(xiàn)[9]研究了旋翼電熱周期控制律防除冰,比較了不同部件使用不同控制律的應(yīng)用效果,表明了周期控制律的有效性。文獻(xiàn)[10]詳細(xì)概述了防除冰溫度控制系統(tǒng)設(shè)計(jì)的具體內(nèi)容。文獻(xiàn)[11]運(yùn)用數(shù)值計(jì)算,以飛機(jī)設(shè)計(jì)標(biāo)準(zhǔn)和飛行工況作為約束條件,提出了多狀態(tài)的電熱系統(tǒng)供電功率的優(yōu)化方法。文獻(xiàn)[12]基于焓法模型,對(duì)周期控制律電熱部件表面溫度變化進(jìn)行了計(jì)算,表明合理的控制律可提升系統(tǒng)的應(yīng)用效果。上述研究工作中,溫度都是通過(guò)計(jì)算的途徑得到的,工程計(jì)算精度有待提高,數(shù)值計(jì)算時(shí)間代價(jià)較大,也無(wú)法對(duì)下一時(shí)刻的溫度進(jìn)行預(yù)測(cè)。
文中提出了基于機(jī)器學(xué)習(xí)的電熱防除冰表面溫度變化趨勢(shì)的快速預(yù)測(cè)方法,以電加熱模型的結(jié)冰風(fēng)洞試驗(yàn)[13]為基礎(chǔ),引用機(jī)器學(xué)習(xí)的有監(jiān)督學(xué)習(xí)方式[14-15],隨機(jī)劃分試驗(yàn)數(shù)據(jù)為訓(xùn)練集和驗(yàn)證集,通過(guò)KNN近鄰回歸[16]、局部加權(quán)回歸[17]兩種機(jī)器學(xué)習(xí)算法做溫度變化率預(yù)測(cè),進(jìn)而獲得溫度變化量,并與前項(xiàng)溫度求和,組成下一輸入特征,以獲得連續(xù)的預(yù)測(cè)溫度。與實(shí)際測(cè)量的溫度進(jìn)行對(duì)比,驗(yàn)證運(yùn)用機(jī)器學(xué)習(xí)方法預(yù)測(cè)飛機(jī)電加熱部件進(jìn)行防除冰時(shí)表面溫度變化趨勢(shì)的可行性。
1 試驗(yàn)
1.1 試驗(yàn)設(shè)備
中國(guó)空氣動(dòng)力研究與發(fā)展中心 3 m×2 m結(jié)冰風(fēng)洞[18-19]是一座閉口回流式高亞音速風(fēng)洞,主要包括噴霧系統(tǒng)、制冷系統(tǒng)、高度模擬系統(tǒng)、風(fēng)機(jī)動(dòng)力系統(tǒng),如圖1所示。該風(fēng)洞擁有主試驗(yàn)段、次試驗(yàn)段和高速試驗(yàn)段等3種類型試驗(yàn)段,文中選用主試驗(yàn)段來(lái)開(kāi)展電加熱防除冰試驗(yàn)。
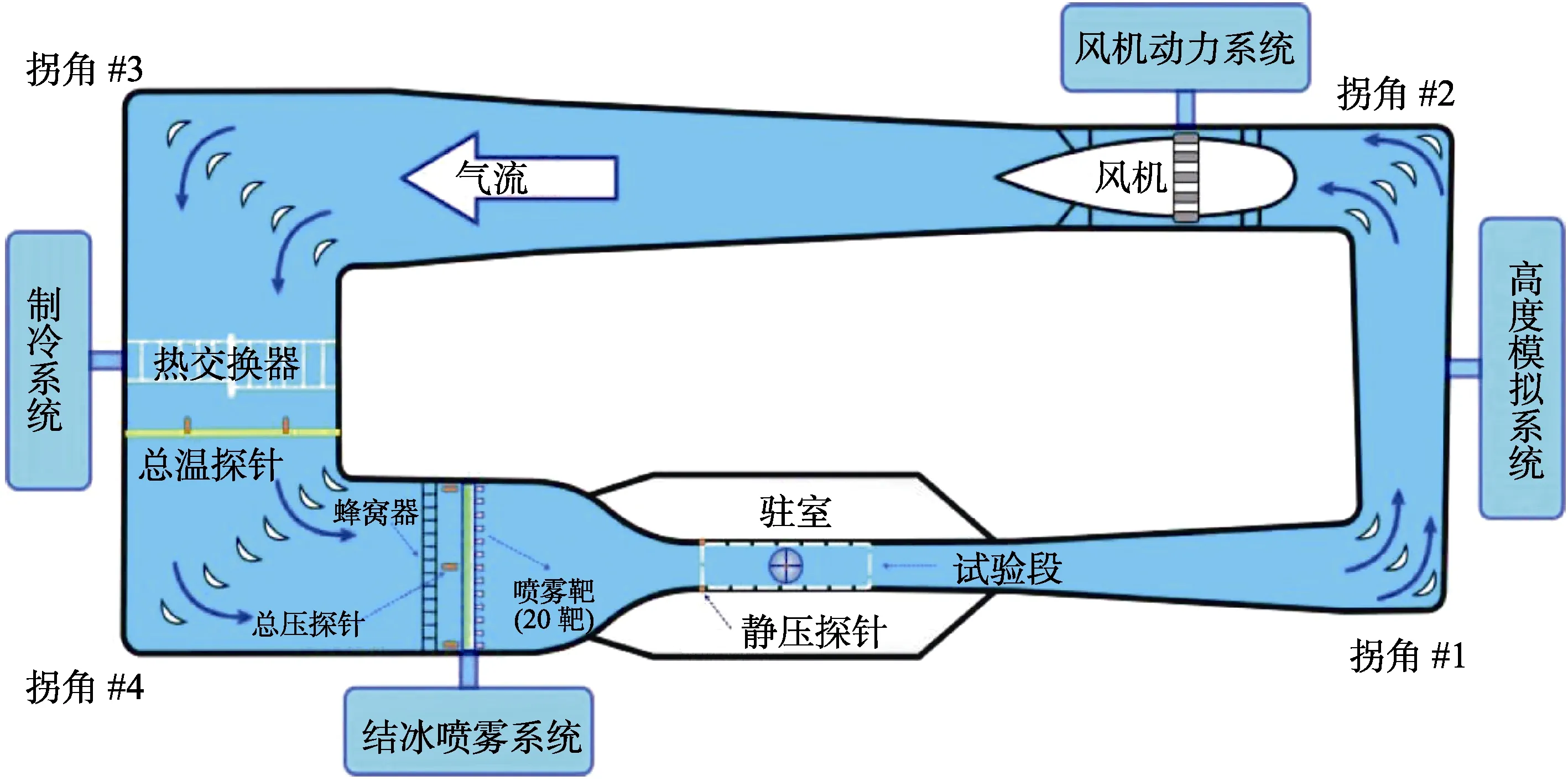
圖1 3 m×2 m結(jié)冰風(fēng)洞Fig.1 3 m×2 m icing wind tunnel
另外,為滿足多種方式電熱防除冰試驗(yàn)需要,3 m×2 m結(jié)冰風(fēng)洞專設(shè)有獨(dú)立的高性能多功能電加熱防除冰控制系統(tǒng)[20],提供DC28 V、DC270 V、中頻400 Hz/AC115 V等實(shí)際機(jī)載使用的可調(diào)電源,接入風(fēng)洞測(cè)控環(huán)網(wǎng),融入整個(gè)風(fēng)洞設(shè)備體系,系統(tǒng)結(jié)構(gòu)如圖2所示。
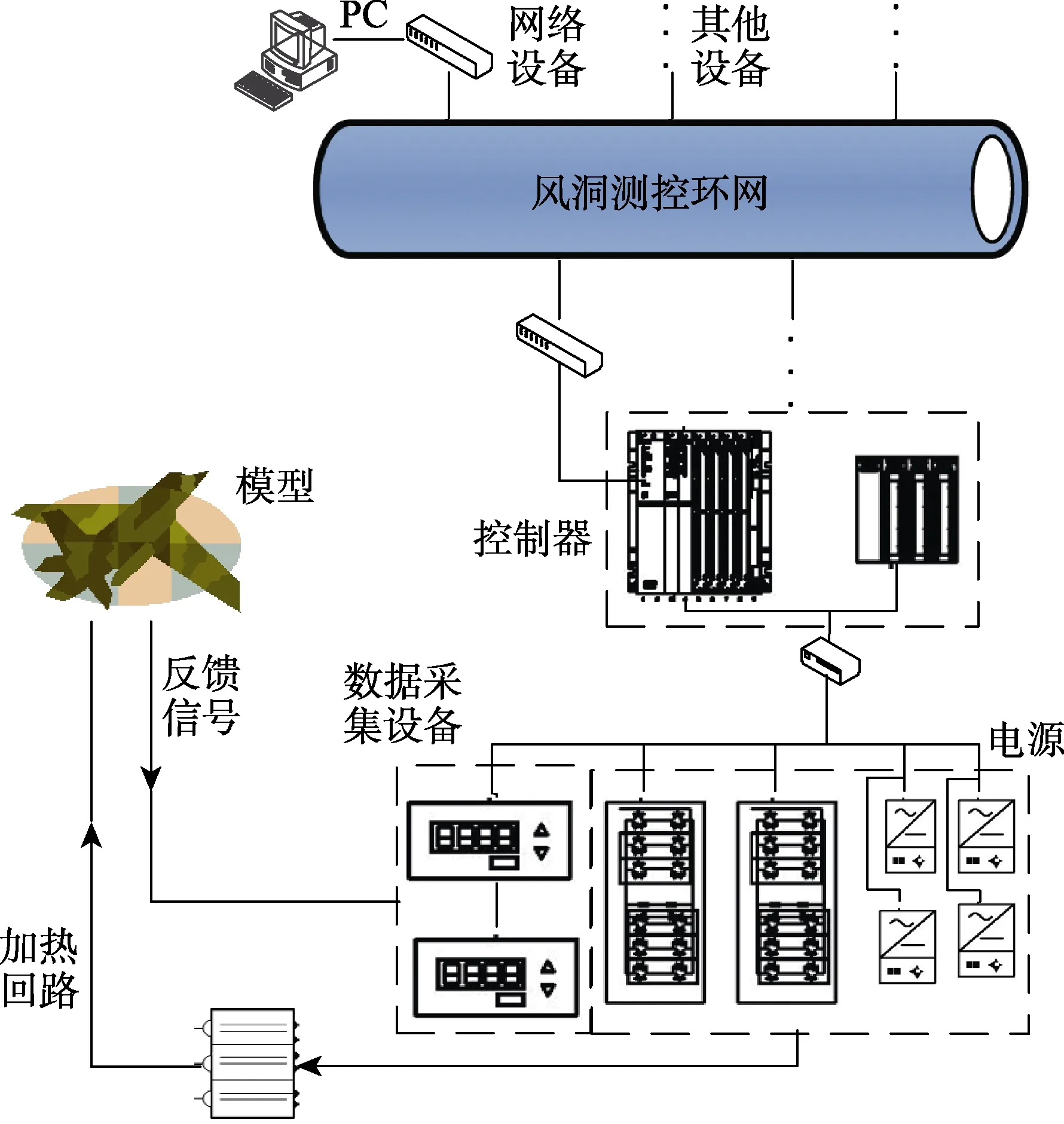
圖2 結(jié)冰風(fēng)洞電加熱防除冰控制系統(tǒng)結(jié)構(gòu)Fig.2 Structure of electric heating anti-icing and de-icing control system for icing wind tunnel
按照電加熱操作流程,設(shè)計(jì)下位機(jī)控制器和上位機(jī)界面的程序,實(shí)現(xiàn)運(yùn)行狀態(tài)監(jiān)視、溫度開(kāi)環(huán)控制、溫度閉環(huán)調(diào)壓或間斷控制、數(shù)據(jù)采集等功能。其中周期性電加熱控制律應(yīng)用系統(tǒng)的溫度開(kāi)環(huán)控制模式,由上位機(jī)配置電加熱的通、斷電延續(xù)時(shí)間,試驗(yàn)?zāi)P偷姆莱鶇^(qū)域被周期性加熱,其表面溫度有規(guī)律地變化。
1.2 試驗(yàn)?zāi)P?/h3>
此次研究的電加熱模型是弦長(zhǎng) 350 mm的螺旋槳,其電加熱元件沿前緣展向兩側(cè)布置,在同一截面垂直距離間距2 cm布置5個(gè)溫度傳感器,測(cè)量截面的溫度分布,傳感器的布置如圖3所示。加熱元件附著于模型前緣兩側(cè),溫度傳感器埋于蒙皮內(nèi)側(cè),溫度測(cè)量點(diǎn)以P3為中心,左側(cè)P1、P2,右側(cè)P4、P5。
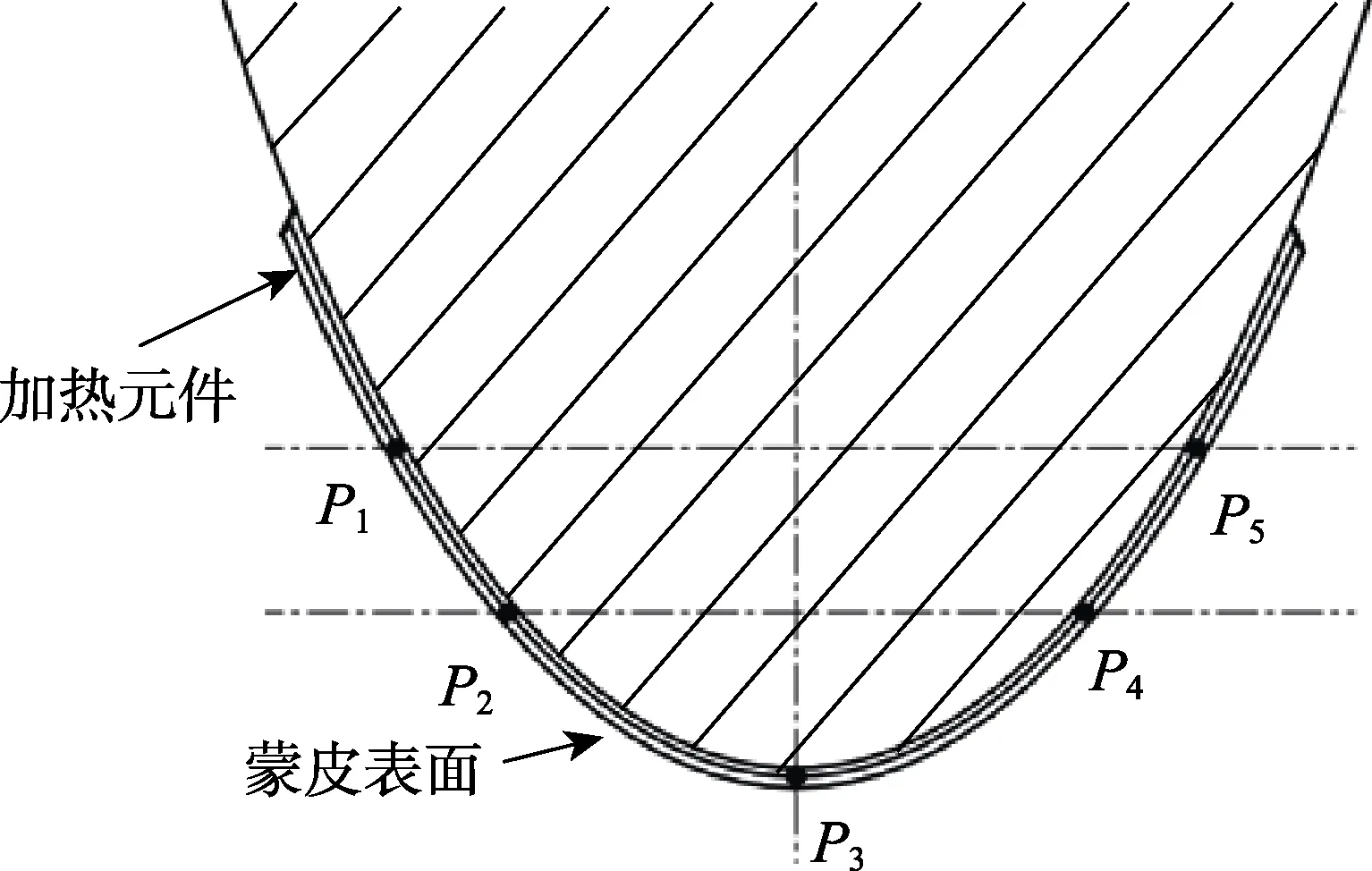
圖3 截面溫度傳感器布置Fig.3 Schematic diagram of cross-section temperature sensor arrangement
1.3 試驗(yàn)條件
模型采用周期電加熱方式進(jìn)行試驗(yàn),單個(gè)加熱周期為50 s,其中通電時(shí)間為25 s、斷電時(shí)間為25 s。模型電熱元件上電輸出的電流變化如圖4所示。共開(kāi)展了4組試驗(yàn),試驗(yàn)參數(shù)主要包括風(fēng)速v、來(lái)流溫度θ∞、粒徑dMVD、液體水含量ρLWC,見(jiàn)表1。
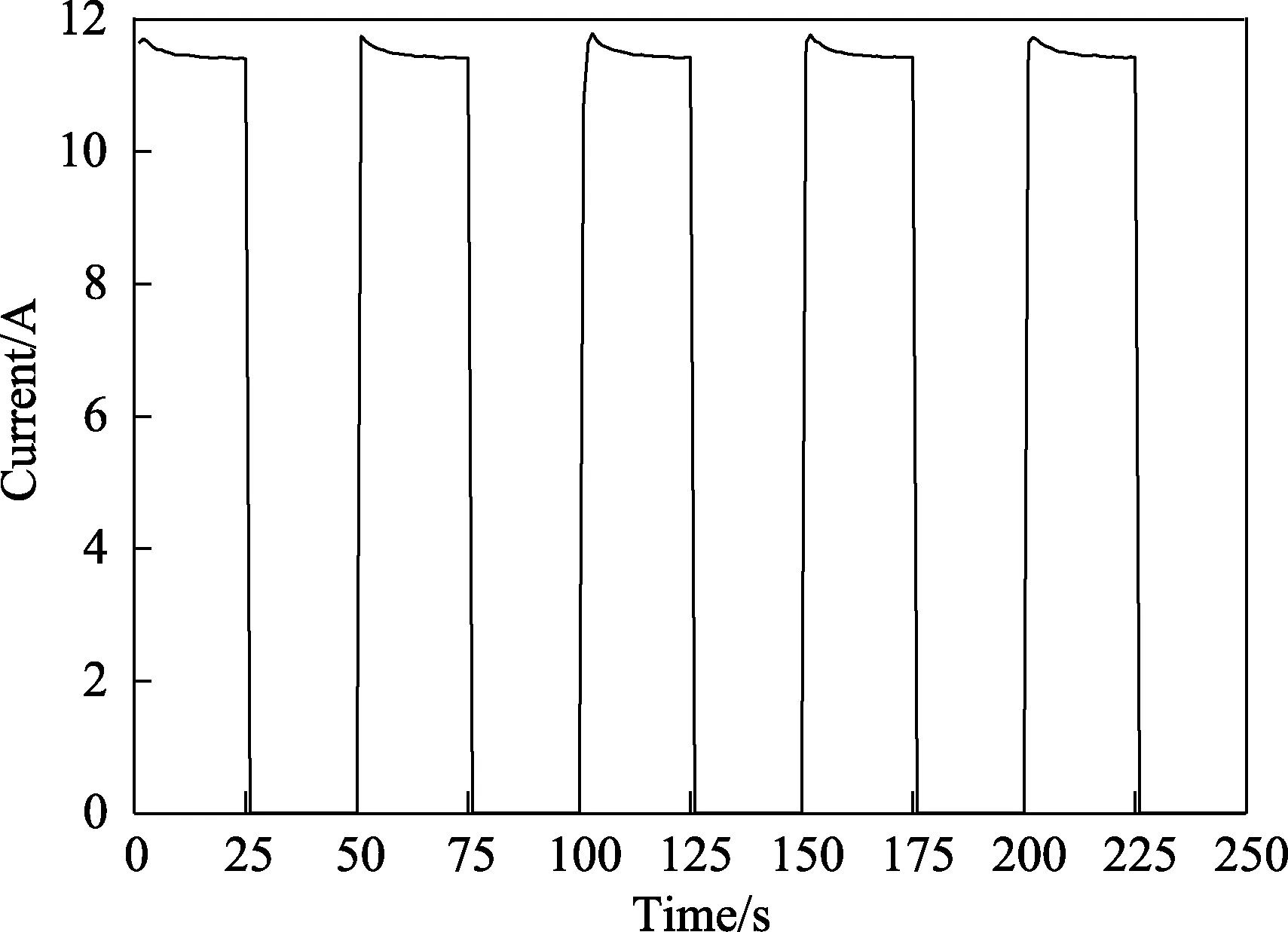
圖4 電熱元件通電25 s、斷電25 s輸出電流變化Fig.4 The output current changes of the heating element is powered on for 25 s and off for 25 s
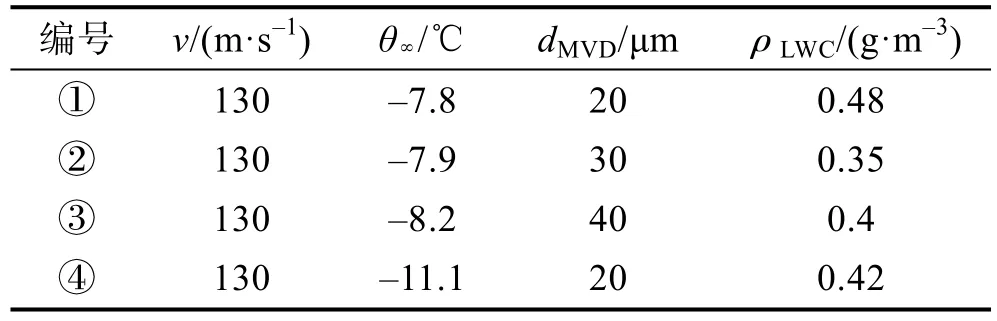
表1 周期電熱防除冰試驗(yàn)工況Tabl.1 Periodic electric heating anti-icing and de-icing test conditions
1.4 試驗(yàn)結(jié)果
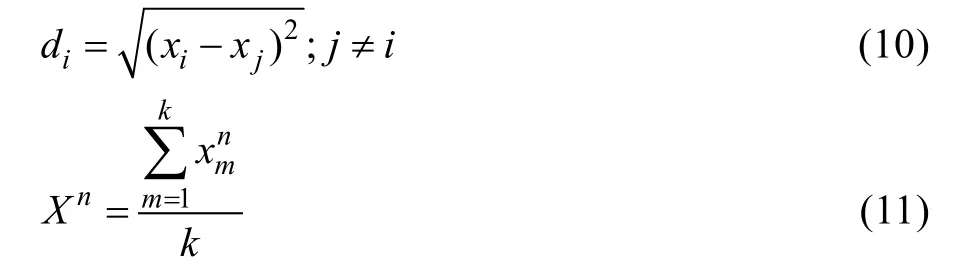
表1的4個(gè)條次試驗(yàn),電加熱系統(tǒng)輸出如圖4所示的加熱周期,并采集、存儲(chǔ)試驗(yàn)相關(guān)參數(shù)數(shù)據(jù)以及表面溫度數(shù)據(jù)。模型測(cè)溫截面5個(gè)點(diǎn)位溫度變化如圖5所示。
由圖5可見(jiàn),截面兩側(cè)P1、P2、P4、P5位置的溫度變化與電流變化規(guī)律一致,通電溫度上升,但通電結(jié)束后延續(xù)約2 s,因剩余熱量,溫度仍在上升,然后下降。由于前緣P3位置液態(tài)水蒸發(fā)量最大,在通電階段出現(xiàn)溫度上升滯后,溫度變化呈現(xiàn)無(wú)次序上升、下降。
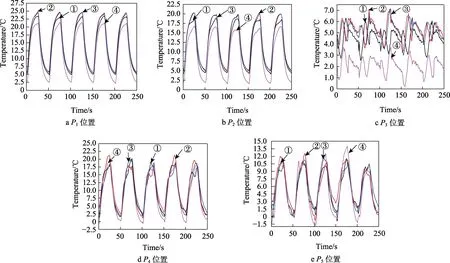
圖5 模型測(cè)溫截面5個(gè)點(diǎn)位溫度變化Fig.5 Model temperature measurement cross-section temperature changes at 5 points: a) P1 position; b) P2 position; c) P3 position; d) P4 position; e) P5 position
2 表面溫度機(jī)器學(xué)習(xí)模型構(gòu)建
2.1 樣本特征參數(shù)的構(gòu)建
此次通過(guò)試驗(yàn)得到表面溫度數(shù)據(jù)及相關(guān)試驗(yàn)參數(shù)數(shù)據(jù),作為用于機(jī)器學(xué)習(xí)的訓(xùn)練集和驗(yàn)證集。飛機(jī)部件在電熱防除冰過(guò)程中,電加熱元件通電提供熱源,所產(chǎn)生的熱量主要通過(guò)加熱區(qū)域表面的對(duì)流換熱、液態(tài)水蒸發(fā)吸熱、部件內(nèi)部熱傳導(dǎo)以及向周圍環(huán)境輻射等方式耗散,并在部件表面的溫度變化上體現(xiàn)出來(lái),所以表面溫度ts與影響其變化的相關(guān)參數(shù)之間的關(guān)系可表示為:

從能量守恒角度出發(fā),模型表面溫度變化量主要與控制律的供電規(guī)律、模型表面溫度、風(fēng)洞環(huán)境溫度相關(guān)。定義同一時(shí)刻供電電流為It、表面溫度為θst、試驗(yàn)環(huán)境溫度為θEt。因此,表面溫度變化率則可表示為:

式(2)中:上標(biāo)t指所有變量在t時(shí)刻的值。引入機(jī)器學(xué)習(xí)的有監(jiān)督學(xué)習(xí)方式,將It、θst、θEt作為輸入特征,溫度變化率sθ˙作為輸出特征,表達(dá)式為:

式(3)為根據(jù)試驗(yàn)所得表面溫度數(shù)據(jù)下一時(shí)刻t+1與當(dāng)前時(shí)刻t的差值來(lái)計(jì)算溫度變化率。
按照通、斷電周期,劃分試驗(yàn)數(shù)據(jù)為若干樣本,從中選出訓(xùn)練集和學(xué)習(xí)集,如式(4)—(6)所示:

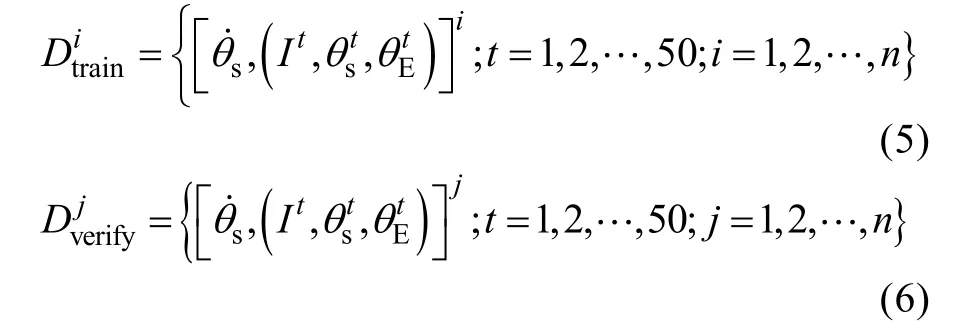
式(4)為總體樣本,式(5)為訓(xùn)練集樣本,式(6)為驗(yàn)證集樣本。根據(jù)表面溫度變化率的特征參數(shù)關(guān)系式,通過(guò)監(jiān)督學(xué)習(xí)算法對(duì)訓(xùn)練集樣本分析推算,得到輸入、輸出特征之間的映射函數(shù):

2.2 表面溫度的有監(jiān)督學(xué)習(xí)方式
由于表面溫度變化率是連續(xù)的,可將其求解轉(zhuǎn)化為有監(jiān)督學(xué)習(xí)中的回歸問(wèn)題,具體流程如圖6所示。驗(yàn)證集通過(guò)特征參數(shù)的映射函數(shù)預(yù)測(cè)表面溫度變化率,從而得到其溫度變化量。然后與當(dāng)前時(shí)刻t的表面溫度求和得到下一時(shí)刻t+1的表面溫度,再與另外的輸入特征變量組合,進(jìn)行下一次預(yù)測(cè),得到驗(yàn)證集樣本的溫度變化率預(yù)測(cè)結(jié)果,并轉(zhuǎn)換為溫度,從而獲得周期電熱防除冰表面溫度的變化趨勢(shì)。
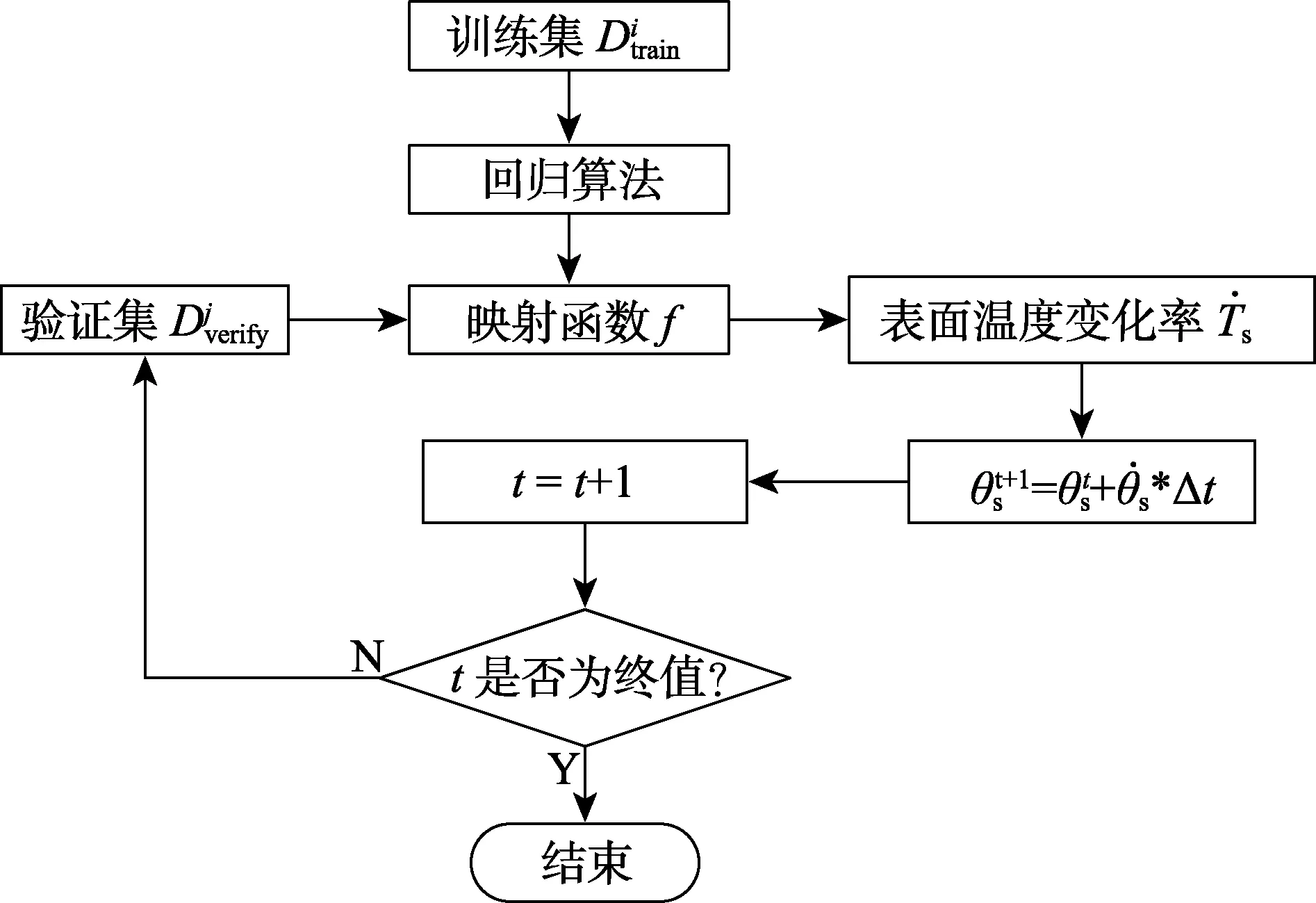
圖6 表面溫度有監(jiān)督學(xué)習(xí)流程Fig.6 Supervised learning process of surface temperature variation
其中,回歸算法選用局部加權(quán)線性回歸算法和KNN近鄰回歸算法。局部加權(quán)線性回歸算法是引入高斯核對(duì)樣本的每個(gè)預(yù)測(cè)點(diǎn),賦予一定的權(quán)重,對(duì)訓(xùn)練集樣本做線性回歸計(jì)算,得到其映射函數(shù)。所述高斯核函數(shù)W和回歸系數(shù)w的表達(dá)式為:
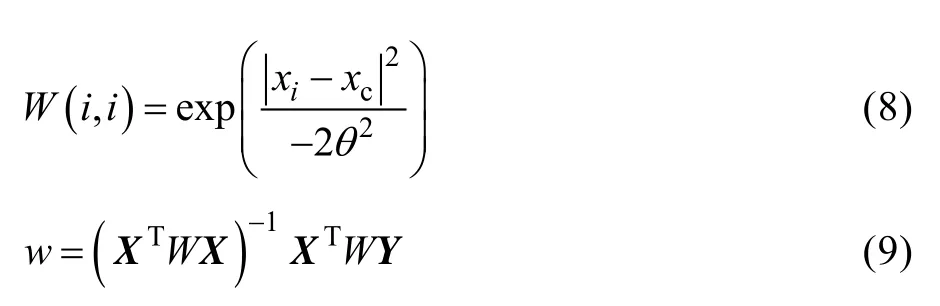
式(8)中:xi為樣本的第i個(gè)點(diǎn);xc為樣本的中心點(diǎn);θ為超參數(shù),用于調(diào)整局部回歸加權(quán)的“局部范圍”。式(9)中,X、Y分別為樣本的輸入、輸出特征矩陣。結(jié)合式(8)和式(9)可知,可改變?chǔ)戎祦?lái)調(diào)節(jié)算法的回歸效果。
KNN近鄰回歸算法原理是找出樣本的k個(gè)最近鄰居,并將這些鄰居的特征平均值賦給該樣本,常用歐氏距離作為“相近條件”,表達(dá)式為:
式(10)中:di表示樣本中其他點(diǎn)xj與預(yù)測(cè)點(diǎn)xi的距離。式(11)中,Xn為預(yù)測(cè)點(diǎn)的第n個(gè)特征;為k個(gè)近鄰點(diǎn)中第m個(gè)點(diǎn)的第n個(gè)特征。KNN近鄰回歸是依據(jù)式(10)搜索樣本預(yù)測(cè)點(diǎn)的k個(gè)近鄰點(diǎn),式(11)則將近鄰點(diǎn)的特征作均值處理,作為預(yù)測(cè)點(diǎn)的特征。
3 預(yù)測(cè)結(jié)果分析及討論
使用Pycharm軟件編寫(xiě)KNN近鄰回歸算法和局部加權(quán)回歸算法程序,導(dǎo)入訓(xùn)練集樣本,得到特征參數(shù)的映射函數(shù)。再對(duì)驗(yàn)證集樣本進(jìn)行預(yù)測(cè)計(jì)算,得到溫度變化率。再根據(jù)前項(xiàng)溫度值轉(zhuǎn)換,獲得學(xué)習(xí)樣本預(yù)測(cè)的溫度變化。圖7給出的是控制律通電25 s、斷電25 s某一學(xué)習(xí)樣本的表面溫度變化預(yù)測(cè)。圖中方形符號(hào)線為KNN近鄰回歸算法預(yù)測(cè)溫度變化,三角形為局部加權(quán)線性回歸算法預(yù)測(cè)溫度變化,圓形為實(shí)際測(cè)量溫度變化。
圖7 控制律通電25 s、斷電25 s某一樣本的表面溫度變化預(yù)測(cè)Fig.7 Prediction of the change of surface temperature of a sample in the control law with power on for 25 s and power off for 25 s: a) P1 position; b) P2 position; c) P3 position; d) P4 position; e) P5 position
由模型測(cè)溫截面 5個(gè)位置的預(yù)測(cè)溫度變化曲線可知,兩種算法對(duì)模型兩側(cè)P1、P2、P4、P5位置預(yù)測(cè)的溫度值與測(cè)量值很接近,而圖7c所示的P3位置溫度變化,為KNN近鄰回歸做的預(yù)測(cè),更符合測(cè)量的變化趨勢(shì)。為進(jìn)一步比較兩種回歸算法的預(yù)測(cè)效果,對(duì)兩種算法的預(yù)測(cè)數(shù)據(jù)分別與測(cè)量數(shù)據(jù)做皮爾遜相關(guān)系數(shù)計(jì)算,反映之間的線性相關(guān)程度。測(cè)溫截面5個(gè)點(diǎn)位溫度變化的相關(guān)系數(shù)及絕對(duì)誤差和見(jiàn)表2。

表2 測(cè)溫截面 5個(gè)點(diǎn)位溫度變化的相關(guān)系數(shù)及絕對(duì)誤差和Tab.2 Correlation coefficient and absolute error sum of temperature changes at 5 points of temperature measurement cross section%
圖7和表2的結(jié)果表明,對(duì)于截面兩側(cè)位置的預(yù)測(cè)效果,局部加權(quán)線性回歸算法得到的預(yù)測(cè)值與測(cè)量值的線性相關(guān)程度較高,比KNN近鄰回歸預(yù)測(cè)效果好。對(duì)于前緣P3位置,局部加權(quán)線性回歸就不適用,預(yù)測(cè)值完全偏離了對(duì)應(yīng)的測(cè)量值。該位置的溫度變化符合通電溫升、斷電溫降的規(guī)律,但不符合試驗(yàn)測(cè)量得到的溫度變化趨勢(shì)。KNN近鄰回歸的預(yù)測(cè)結(jié)果較符合,由于KNN近鄰回歸是直接使用鄰近點(diǎn)的特征來(lái)作預(yù)測(cè),受表面物理變化過(guò)程影響較小,得到的相關(guān)系數(shù)計(jì)算結(jié)果為80.98%,相關(guān)程度屬于極度相關(guān)。就截面的全部測(cè)溫點(diǎn)位而言,KNN近鄰回歸算法對(duì)于整體的預(yù)測(cè)效果較好,若想獲得最佳的預(yù)測(cè)效果,可針對(duì)截面位置單獨(dú)地選擇預(yù)測(cè)算法。同時(shí),另需注意機(jī)器學(xué)習(xí)方法是以樣本為基礎(chǔ),樣本數(shù)據(jù)影響預(yù)測(cè)結(jié)果的精度,所以用于預(yù)測(cè)計(jì)算的樣本數(shù)據(jù),需考慮模型導(dǎo)熱系數(shù)、溫度測(cè)量手段、數(shù)據(jù)采樣率等因素。
4 結(jié)論
利用結(jié)冰風(fēng)洞電加熱防除冰控制系統(tǒng)進(jìn)行了周期性電加熱防冰試驗(yàn),并采集、存儲(chǔ)電加熱模型的試驗(yàn)數(shù)據(jù)。依據(jù)模型的電加熱特性以及有監(jiān)督學(xué)習(xí)方式,構(gòu)建了表面溫度變化率與供電、表面溫度、環(huán)境溫度的機(jī)器學(xué)習(xí)特征參數(shù),以預(yù)測(cè)表面溫度變化趨勢(shì),得到如下結(jié)論:
1)KNN近鄰回歸算法適用于截面的所有測(cè)溫點(diǎn)位,而局部線性加權(quán)回歸算法對(duì)前緣位置不能作出準(zhǔn)確的預(yù)測(cè),但對(duì)于其他位置,比KNN近鄰回歸的預(yù)測(cè)效果好。
2)應(yīng)用兩種機(jī)器學(xué)習(xí)算法做預(yù)測(cè)計(jì)算,其結(jié)果與真實(shí)測(cè)量數(shù)據(jù)的線性相關(guān)系數(shù)達(dá)到80%以上,表明機(jī)器學(xué)習(xí)的方法可用于預(yù)測(cè)電加熱防除冰部件表面溫度變化趨勢(shì)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
