筒倉卸料小車關鍵技術及應用
2021-09-03 08:13:30王洪賓穆霄剛杜勝利
起重運輸機械 2021年14期
王洪賓 穆霄剛 江 輝 杜勝利
國能黃驊港務有限責任公司 滄州 061100
0 引言
煤炭的堆存一般采用堆場或封閉筒倉的形式,其中筒倉儲煤具有防塵抑塵效果突出、整體美觀和諧、自動化水平高、環保效益高的特點,已被廣泛應用在煤礦、港口和電廠等。對于大型的儲煤筒倉裝卸作業系統而言,其吞吐量巨大的物料運營特點要求其在環境友好的前提下提升煤炭裝卸效率和安全性,研究安全高效的筒倉卸料小車關鍵技術對于完善筒倉裝卸工藝,實現專業化、自動化管理,降低企業項目投資,開發先進煤炭裝卸技術,實現煤炭高效環保裝卸具有重要的意義。
1 卸料小車概況
國內某港口采用封閉筒倉儲煤工藝,超大型筒倉群共由48 個單倉直徑40 m、高度43 m 的筒倉組成,總容量約144 萬t,筒倉頂部布置遠程全自動化控制單線進倉作業卸料小車,額定卸料能力8 000 t/h,最大卸料能力為9 200 t/h,單臺自重151 t,行走變頻調速范圍0 ~30 m/min,倉頂行走距離255 m,實現帶速4.2 m/s的自動行走卸料。卸料小車采用門式結構,由主體機架、驅動平臺、尾車帶式輸送機、司機室、改向滾筒、平衡梁、夾軌器、三通溜槽、電氣控制系統、落料密封接口等組成。行走軌道采用落地布置形式,沿帶式輸送機雙向運行行走,可實現在最大負荷時啟動和停止。卸料工藝采用單線進倉往復行走卸料,通過車體上的三通溜槽實現將上游帶式輸送機所運載的煤炭卸入筒倉內。
2 行走驅動能力設計
卸料小車在儲煤筒倉集群的工程應用中頻繁出現飛車現象,以示例港口CT9 卸料小車為例,監控顯示最遠飛車距離達50 m,多次以遠超限定速度的形式失控撞擊限位止擋,造成小車主體結構損壞的嚴重后果。卸料小車飛車存在多方面的原因:
1)軌道覆蓋煤塵、積水、結冰等雜質,造成小車行走輪與軌道滾動摩擦系數改變,在外力不變的作用下由于摩擦力減少引發飛車現象;
2)帶式輸送機輸送帶經過卸料小車有輸送帶張力的作用 由于卸料小車對煤的轉卸,頭部拋料滾筒處受到的張力最大,尾車上游部分的輸送帶張力較低,下游部分的輸送帶張力較大。輸送帶的張力差作用在卸料小車上造成了卸料小車的飛車。尤其是在重載啟動和緊急制動時,張力非常大,要充分重視輸送帶張力對卸料小車的影響。
3)尾車物料對卸料小車的影響 在行走機構驅動能力設計中,當尾車運送物料的質量與運送機械自重占比較大時,需考慮尾車運載物料的慣性力以及物料運動對卸料小車的沖擊力等。連續料流沖擊作用產生的沖擊力是一個復雜的彈性過程,沖擊過程中有復雜的能量變化形式。利用理論力學中的沖量定理可得出沖擊力的表達式為
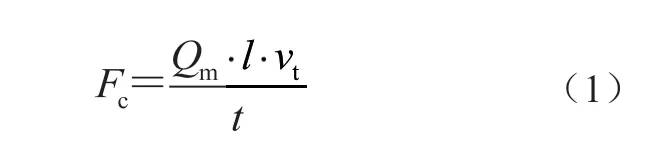
式中:Qm為物料流量,l為尾車長度,vt為尾車物料運輸速度。
計算出料流沖擊力后,可得出卸料小車行走機構的滿載運行阻力,考慮傳遞系數和安全系數后可得出行走機構的驅動力。
3 卸料斗尺寸分析
筒倉采用鋼筋混凝土立式筒倉形式,卸料小車的卸料溜槽為三通分叉溜槽。三通溜槽分叉的幾何尺寸決定了筒倉內的最終可達料型,其結構尺寸對筒倉的容積可利用率設計具有重要的意義。卸料小車采用三通落料的理想筒倉堆型,如圖1 所示。
在料堆高度一定的情況下,按圖1 中選取不同的分叉溜槽落料點中心距L,可以得出占用不同容積的料堆堆型,如表1 所示。
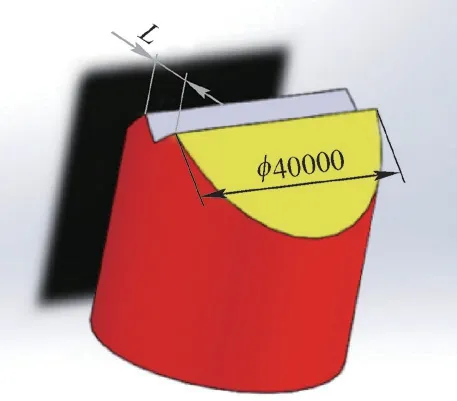
圖1 卸料小車卸料理想堆型
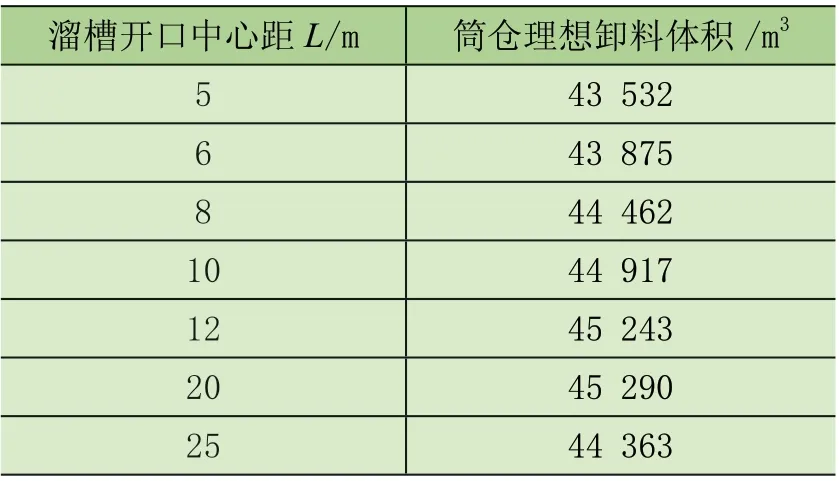
表1 多種分叉溜槽落料點中心距計算結果
由表1 可知,在不同的分叉溜槽落料點中心距L值下,筒倉可卸物料的體積不同,隨著L值由小到大的變化,筒倉料堆可堆卸體積經歷了由小變大隨后又減少的過程,為了求得最優解,需要建立分叉溜槽落料點中心距L與理想卸料體積的關系式。L值過小會造成筒倉可堆料容積的浪費,L值較大勢必會增加設備投資,最終可在綜合考慮工程投資和技術應用背景的情況下選取理想設計值。示例港口8 臺卸料小車的三通分叉溜槽最終選取具有最佳經濟效益指標的中心距為8 m。
4 控制系統設計
卸料小車的控制方式主要由中央控制室遠程無人自動操作、中央控制室手動操作和單機司機室現場手動操作3 種方式組成,控制系統結構如圖2 所示。
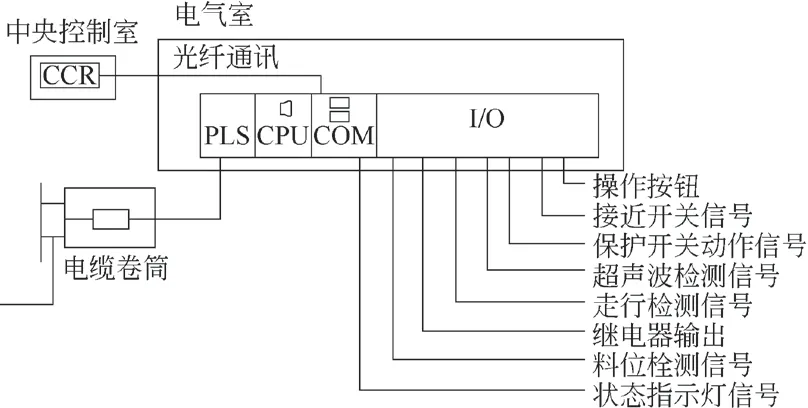
圖2 卸料小車控制系統結構圖
正常作業操作方式為中控室自動操作,可以實現高效的全自動卸料作業。卸料小車采用非接觸式刻度標尺精確定位技術采集行走實時位置,應用絕對值編碼器和格雷母線使分辨率達2 mm,定位精度誤差在 ±5 mm,實時精準監控卸料小車的運行。雙向行走控制采用PLC+變頻器的形式,行走控制與帶式輸送機信號、倉位信號、堵料信號以及尾車料流信號等筒倉安全信號連鎖,實現對卸料小車遠程監控和自動化連鎖控制,精準進行行走定位布料作業。
5 堆料工藝設計
卸料小車采用單線進倉工藝,如圖3 所示。每列筒倉頂部布置一條帶式輸送機廊道,廊道內采用帶式輸送機+卸料小車的作業方式完成倉內布料,即卸車線翻車機系統卸下的煤炭經由帶式輸送機轉接輸送到筒倉頂部的帶式輸送機上,再通過卸料小車尾車及其分叉溜槽完成向筒倉內卸料的過程。卸料小車可實現定點卸料,也可在工作時前后移動進行布料,每列筒倉頂部、帶式輸送機兩側對稱布置一條長36 m、寬1 m 的進料口,進料口設有防塵覆蓋帶。筒倉堆料作業有只進料不出料、邊進料邊出料2 種作業工況。
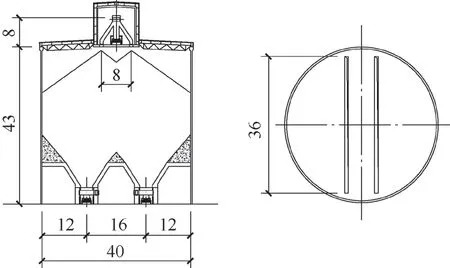
圖3 卸料小車單線卸料進倉
5.1 三點卸料工藝
堆料作業時卸料小車根據中控指令,自動行走至指定的作業卸料筒倉。其行走距離判定由機上編碼器和地面格雷母線系統共同完成,可實現卸料小車的精確行走定位。筒倉堆料方式可根據倉內料高進行判斷,當筒倉為空倉或倉內料位低于25 m 時,為了節能,減少小車行走次數,采用三點卸料方式,卸料點設定在筒倉6 個漏斗出料口的上方;當筒倉內料位高于25 m 或倉容剩余大于5 000 t 時,可采取5 點卸料方式,卸料點為筒倉卸料區域的5個均分點處;在卸料流程還剩余300 t時,卸料小車自動采取行走往復卸料方式,用來保證筒倉內料堆的平整。
當筒倉為空倉卸料時,卸料小車自動行進至筒倉第一個卸料點開始卸煤,當卸料高度達到5 m 時,自動移動至下一卸料點,在料堆再次達到5 m 時,自動下移。移至最后一點后持續堆料,當料位雷達檢測到比上一卸料點存在5 m 高差時,自動后退至第二卸料點作業,以此依次作業進行。當作業量剩余300 t 時,卸料小車開始行走往復卸料,并通過機上料位雷達和筒倉內雷達自動跟蹤低料位點進行料堆平整作業。當筒倉內有料但料高不足25 m 時,卸料小車同樣采用三點卸料方式,但起始位置在3 個卸料點料高的最低處,作業開始后先填平料堆,然后從第一個卸料點開始堆料,堆料方式同空倉卸料。
當筒倉內料高高于25 m 或倉容剩余大于5 000 t 時,卸料小車采用五點卸料方式。在流程作業開始時,卸料小車將根據雷達料位顯示自動填平倉內的低料位點,然后從筒倉內的第一個卸料點開始卸料,五點卸料方式料差定義在3 m。同樣在剩余300 t 物料時,卸料小車自動采取行走往復卸料方式,用來保證筒倉內料堆的平整。三點卸料工藝無法實現理想料型,存在弊端,主要有:
1)倉容利用率低 煤堆上部距離筒倉鋼結構距離裕量過大,筒倉實際載煤量在倉均2.5 萬t,遠未達到每座筒倉3 萬t 的設計能力。
2)煤堆不平整 料堆呈現單峰形式,相鄰波峰實際高差可達7 m,造成因料位分布不均偏載;同時3 個主卸料點之間會形成低谷,出現波浪形料堆。
3)卸料小車的單倉卸料行程較小,筒倉周邊空間沒有充分利用。
4)卸料小車往復直線行走堆料過程中,在預設堆高下無法實現隨卸料小車行走距離行進,料堆頂部可堆體積沿筒倉半徑方向的逐步增大的堆料需求。
5.2 多點自動卸料工藝
相比于三點卸料工藝,為了最大化合理利用倉容,提高作業效率,通過理論建模與大量實測數據比對,建立了基于時間控制的多點卸料工藝,實現了倉容的科學利用,主要工藝改進為:
1)調整雷達檢測報警極限料位 倉頂房地面基準為H倉頂=49.400 m,筒倉承重橫梁的高度為L橫梁=1.5 m。可以得出,橫梁底面的高度為H橫梁=H倉頂-L橫梁=47.9 m;筒倉地面基線為H地面=6.1 m,筒倉倉底雷達測量0 m 基準與地面基線的距離為L雷達=4 400 mm,即雷達高料位的0 m 基準為H雷達=H地面+L雷達=10.5 m。可以得出倉頂橫梁底面距雷達0 m 基準為L橫梁=H倉頂-H雷達=37.4 m。為保留一定的裕量,將37 m 作為筒倉卸料極限高度。實現了單個筒倉的最大堆存量提升4 000 t。
2)調整筒倉卸料小車行進方向卸料極限位置 經過檢測卸料小車前后極限位距離落料口邊緣1.7 m,將小車的前后極限分別沿行走方向調整了1 m,極限位每挪動1 m 將增加倉容150 t,通過增加卸料小車行走距離,每個筒倉增加容積300 t。為了保證筒倉安全作業,卸料時不出倉,設計了格雷母線與編碼器的校準以及格雷母線的自行校準,確保小車的卸料運行的精準與安全。
3)多點移動自動布料技術 通過多點移動自動布料技術可實現卸料點的智能選擇,卸料時初始點不以卸料小車軌道方向第一雷達料位為參考點,而是首先邏輯判斷最低料位點與其他參考點的相對料位差,料位差超出預設值后優先在低料位點啟動卸料流程進行補償投料,防止筒倉底部出料時造成料位不平衡現象,有效避免了卸料作業出現料位大高差引發筒倉偏載的現象,延長了筒倉及配套設備的使用壽命。
4)將布料工藝設計為32 m 以下三點堆料,32 m以上采用時間控制的多點行走堆料+連續行走堆料的方式。當三點堆料煤堆高度達到32 m 之后,選取13 個點,通過時間控制的定點定時卸料,首先填平P1、P2、P3這3 個固定卸料點以及P1、P3與筒倉壁之間的低谷,然后再進行連續行走布料。通過理論推導和不斷的堆料試驗,建立合理的行走位置與時間控制邏輯。
如圖4 所示,采用基于時間控制的多點行走堆料+連續行走堆料的方式具有遠大于三點堆料工藝空間利用率,實現倉容從33 m 提升到36 m,單個筒倉可有效作業儲煤量從23 000 t 提升到27 000 t。
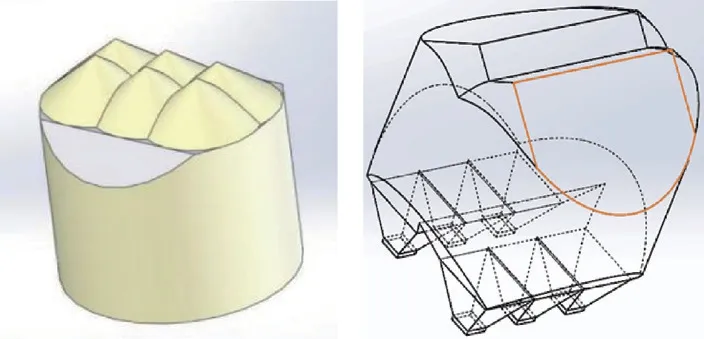
圖4 三點堆料與多點自動堆料堆型對比
6 結語
卸料小車機構簡單、維修量小、自動化程度高,維護及維修成本低,在大規模筒倉布料工藝中廣泛應用。但在工程應用中應考慮影響行走機構驅動力的多種因素,詳細計算顆粒流沖擊力,得出符合工程實際的行走機構驅動力。單線進倉工藝卸料小車采用基于時間控制的多點布料可有效利用筒倉空間,實現接近理想料型的低能耗卸料。卸料小車的設計對筒倉運營效率具有重要影響,應開發高精度高可靠度高度自動化的控制系統,通過先進可靠的卸料工藝設計實現筒倉科學合理使用。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
山東冶金(2019年6期)2020-01-06 07:45:54
世界農藥(2019年2期)2019-07-13 05:55:12
故事大王(2016年7期)2016-09-22 17:30:08
銅業工程(2015年4期)2015-12-29 02:48:39
新疆鋼鐵(2015年3期)2015-11-08 01:59:52
石油化工應用(2014年8期)2014-03-11 17:40:03
兒童故事畫報(2013年3期)2013-06-24 05:40:30
