環境噪聲信源分析與特征辨識虛擬儀器系統研發
2021-09-03 08:50:44喬佳樂劉昭廷劉祥樓孟祥斌
綏化學院學報 2021年8期
喬佳樂 劉昭廷 劉祥樓 孟祥斌 劉 聲
(1.綏化學院電氣工程學院 黑龍江綏化 152061;2.東北石油大學 黑龍江大慶 163318)
近年來,國內外對于噪聲聲源特性研究取得了一系列的成果,尤其是聲源定位技術有了明顯提升。基于時延技術TDOA[4]和基于波束形成技術SRP-PHAT的各類應用更加廣泛[1-3]。其中,SRP-PHAT方法比TDOA方法更適合于遠場環境。而GCC-PHAT方法誤差更小且計算時間更快,在近場環境中比SRP-PHAT更具優勢[4-6]。Al-Sheikh B[7]等人設計一種用于水平面360度掃描聲信號的四元十字MIC陣列聲源方向估計系統,將頻譜分析和小波變換應用于參考傳聲器上,采用廣義互相關算法對麥克風間的時延進行估計。對于小型便攜式系統,特別是多任務微嵌入式系統,在采樣率小于10kHz情況下進行準確聲源定位仍具挑戰性。Mohammad Shukri Salman、Thomas Padois、Maximo以及Kober V I[8-10]等人提出了一種將確定采樣率輸入信號轉換成頻率較高的另一信號的廣義互相關GCC方法。可以根據GCC方法定位計算時間和目標位置估計標準差,得到算法最優插值因子,進而設計由五元交叉麥克風陣列構成的低采樣率三維近場被動聲源定位陣列。但是SRP-PHAT存在一個缺陷,即需要在大量候選位置上進行搜索,對于大型麥克風陣列系統而言,其實時運行速度太慢。針對此類不足,Yook D[11,12]等人提出了一種兩層搜索空間聚類方法來加速基于SRP-PHAT的聲源定位。該方法的特點是將聲源的候選位置劃分多組,找到可能包含最大功率位置的小部分組,再通過少量組內搜索確定聲源位置。運用該方案計算既可以大幅度降低成本,又可以保障定位精度沒有損失。而在遠場模型中,從小型麥克風陣列中提取方向信息的相關技術正穩步發展。BaoQ[13]等人將感興趣區域分成大小相同的局部網格,用自相關方法來評估每個網格的可能性,用MATLAB來展示聲源方向實際可能分布的位置。在波束形成估計中使用插值法和自相關矩陣克服數據限引起的方向誤差。上述一系列研究成果為本系統研發提供了理論支撐。
一、環境噪聲信源特征辨識與分析機理
環境噪聲信源類型多變,從時域分析角度分為瞬時沖擊波、短時脈動波與長時連續波等不同類型,通過時域分析確定噪聲波動態時間特征。從頻域分析角度頻譜分為單頻有調聲、多頻有調聲和沖擊聲,通過幅度譜或功率譜確定頻域特征。從聲源強度分析角度,由弱噪聲到強噪聲按聽覺感受可進行分段。使用聲級計測量噪聲時,聲壓傳感器采集聲壓信號。如果將其直接輸出,只能得到與頻率無關的線性聲級。根據人耳的生理特點,人的聽覺取決于聲強與頻率,即人所聽到的聲信號如果是相同的聲壓不同的頻率,其感覺也會有一定差異。考慮到人耳對不同頻率的聲信號聽辨與濾波特性的實際感受,同時參照等響曲線進行濾波處理,對人耳敏感的頻率成分予以加強,而對人耳不敏感的頻率成分進行適當的衰減,以求與人耳聽覺的主觀感受盡可能一致。此種修正方法稱為頻率計權,經過計權網絡測得的聲級稱為計權聲級。現已有A、B、C、D等多種計權網絡,其等響曲線如圖1所示。本系統采用A計權網絡。

圖1 計權網絡的頻率響應曲線
聲源發出的噪聲在空氣中以振動波的形式向聲源周邊傳遞,空氣對其傳播形成阻力造成衰減。當聲波類型屬于無指向性點聲源時,其幾何發散衰減表達式參見(1.1)。其中,第二項表示了點聲源的幾何發散衰減量。若點聲源倍頻帶聲壓級LW,且聲源處于自由聲場,則距離點聲源r處的倍頻帶聲壓級Lp(r)表達為公式(1.2),如果聲源處于半自由聲場,則Lp(r)表達為公式(1.3)。當點聲源具有指向性時,其強度分布指向性特性較強。而針對自由空間的點聲源,在某一角度θ方向上距離該點聲源r處的倍頻帶聲壓級Lp(r)θ表達參見公式(1.4)。其中,DIθ為θ方向的指向性指數,DIθ=10lgRθ;Rθ指向性因數,Rθ=Iθ/I;I為所有方向上的平均聲強,單位W/m2;Iθ為角度θ方向上的聲強,單位W/m2。

二、基于虛擬儀器技術的噪聲信源特征分析與辨識系統構建
噪聲信源特征分析與辨識系統的基本組成,按功能可分為噪聲信息采集、信源空間定位、信源特性分析和信源特征辨識四個部分,具體參見圖2。基于虛擬儀器技術完成系統構建,需要完成四個關鍵環節。第一是噪聲信息采集環節,采用半球型麥克風陣列通過空間布點實現多路噪聲信息連續采集,需要預先對半球型麥克風陣列進行空間檢測點定位,以此作為聲源點空間定位的參考點。第二是噪聲信源空間定位環節,根據采集的噪聲信息樣本分析,通過聲源點定位算法準確定位聲源,確定聲源點強度。第三是噪聲信源特性分析環節,利用虛擬儀器技術中的單頻信息提取技術對噪聲信源進行時域分析和頻域分析,確定聲源的時頻特性。第四是噪聲信源特征辨識環節,利用噪聲特征識別技術,通過主特征比對確定信源類型。

圖2 噪聲信源特征分析與辨識系統
基于虛擬儀器技術實現噪聲信源特征分析與辨識系統構建。依托LabVIEW虛擬儀器軟件開發平臺,通過半球型麥克風陣列實現對環境噪聲的實時自動監測,半球型麥克風陣列實物參見圖3。采集的實時信息傳到上位機,進入LabVIEW軟件處理系統。信源空間定位、信源特性分析和信源特征辨識三個部分由上位機通過虛擬儀器技術實現。智能測試前端硬件系統采用STM32單片機為核心,運放采用了精密放大器OPA340,精密放大器由麥克風陣列、信號調理電路、與上位機的無線通信電路組成,智能測試前端電路實物參見圖4。

圖3 半球形麥克風陣列實物圖
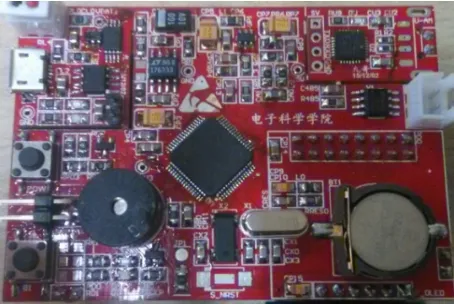
圖4 智能測試前端電路實物圖
三、實驗測試
測試環境,選定50m2的聲學實驗室,室內溫度23℃,相對濕度42%,聲源為Type4205和HP1001,將智能檢測前端固定在離地面2.5m的室內頂端,分別將聲源放置不同的方位。聲源發出1000Hz單頻波,聲壓強度為100dB。放置于不同方位,聲源高度0.23m。具體系統測試數據參見表1。
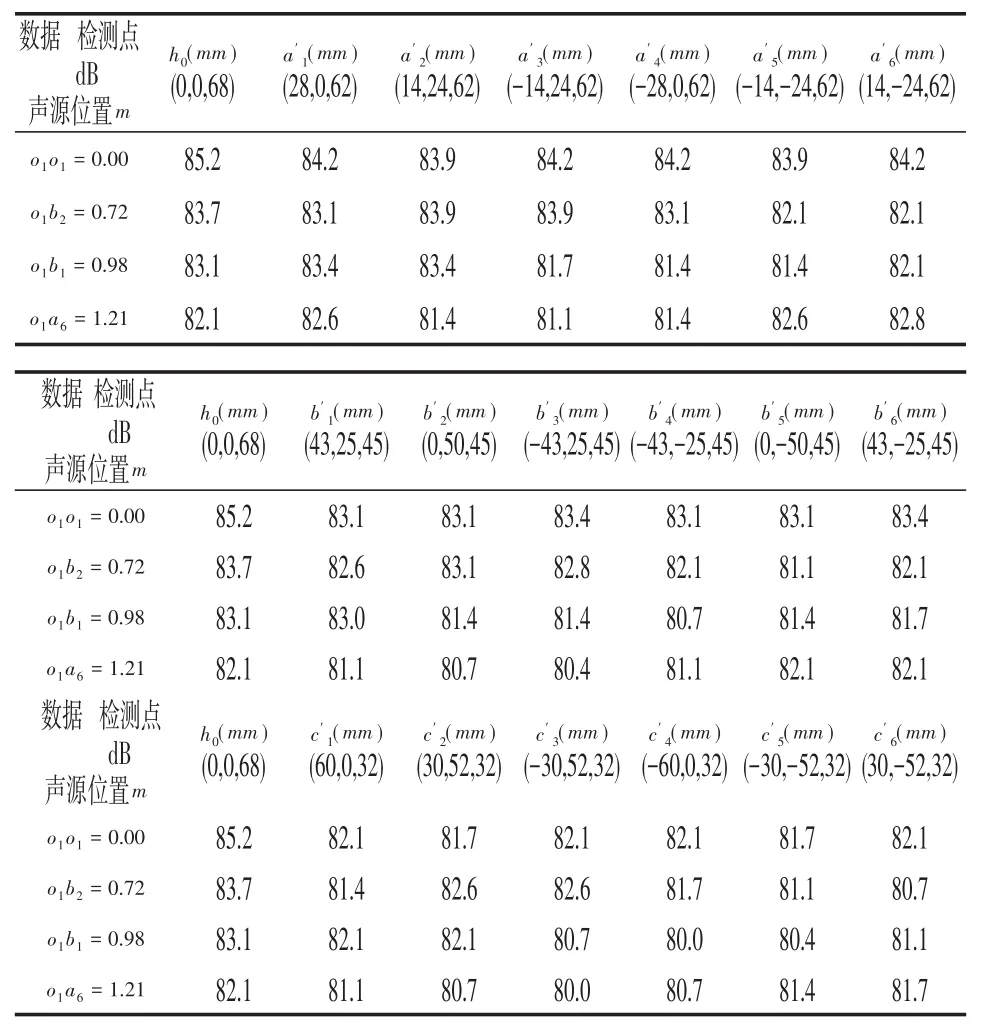
表1 系統測試數據
測試系統人機交互界面參見圖5。界面有聲源點定位相關數據和平面坐標指示。有兩個視窗清晰地顯示聲源的時域波形和頻譜。根據測試結果分析發現,聲源點定位存在誤差,具體參見表2。

圖5 聲源特性分析和信源特征辨識界面
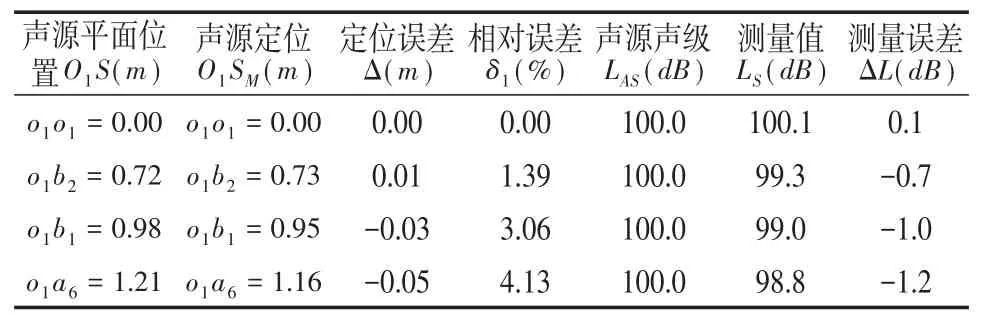
表2 誤差數據分析表
四、結論
基于針對環境噪聲進行連續實時監測與同步時頻分析一體化的設計理念,設計開發以虛擬儀器技術為核心的環境噪聲信源特征分析與辨識系統。由19個電容聲壓傳感器按半球型均勻布設形成檢測前端陣列,以LabVIEW軟件開發平臺為支撐,實現對環境噪聲信號從采集、參量計算、時頻分析到聲源類型判定多功能一體化監測。測試結果表明:該虛擬儀器系統定位最大相對誤差4.13%,測量聲級分辨率0.01dB。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44