高速公路團霧預警系統設計
2021-09-05 11:43:30吳宇軒李世臻
電子設計工程 2021年17期
吳宇軒,李世臻,劉 楠
(1.長安大學信息工程學院,陜西 西安 710000;2.長安大學電子與控制工程學院,陜西 西安 710000)
高速公路車輛運行安全與高速公路天氣狀況有著密切的關系[1]。2016年,公安部交通管理局組織對高速公路團霧多發路段進行排查,總結出年均發生3次以上團霧高速路段1 788處,其中,年均發生10次以上高速路段912處。文獻[2-4]研究了高速公路團霧對行車安全的影響,說明了對團霧天氣檢測的必要性、可行性。現有的高速公路天氣預警仍然依賴于天氣預報,其時效性、準確性和應急反應能力都無法滿足需求。
近些年來,對霧的特征分析、霧的形成原理、等級評判的相關研究更加深入[5-6]。文獻[7]開展了團霧主動誘導系統的監測研究[7]。文中結合先前國內研究的團霧各項特征,通過各傳感器實際測量值,給出了一組團霧等級劃分的參考指標,進一步擴展了團霧的等級分類。同時,結合多種傳感器構成了團霧檢測和數據傳輸一體系統,給出了相應車輛管控措施。
1 系統構成
系統使用STM32單片機作為主控,由道路控制端、團霧檢測端、MCU控制端以及云端服務平臺構成。其中,圖霧檢測端主要包括溫度濕度傳感器、PM值傳感器、攝像頭、能見度儀;道路控制端主要包括LED情報板、光電檢測模塊、引導燈帶;MCU控制端包括無線收發模塊、GPRS模塊。圖霧預警系統結構如圖1所示。
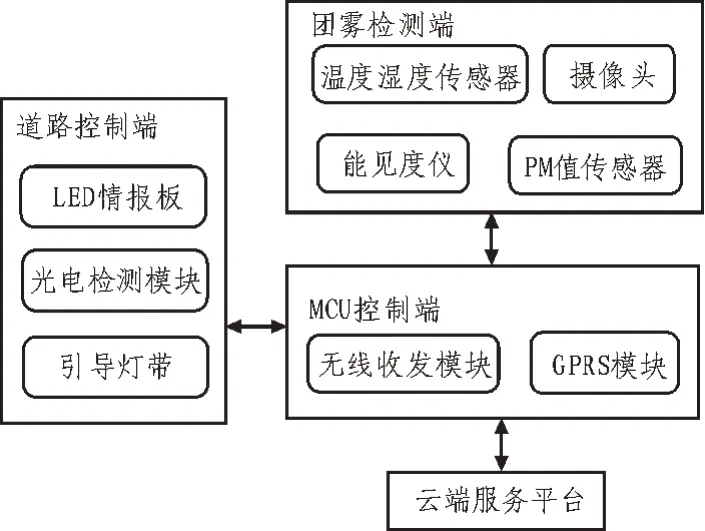
圖1 團霧預警系統結構框圖
1.1 團霧檢測
團霧檢測依照霧的能見度特性、相對濕度特性、氣溶膠粒子特性[8],設置了溫度濕度傳感器,用于相對濕度的測量;能見度儀用于對地面能見度距離進行測量;PM值傳感器用于測量氣溶膠粒子和霾滴的濃度。將檢測到的各項數值通過串口連接,并發送到主控端上。
1.2 團霧等級劃分
根據各項傳感器傳輸的數據,結合氣象部門對相關參數的研究,給出不同條件下形成的團霧等級劃分指標[9]。
1.3 數據處理與控制策略
MCU主控根據不同模塊回傳的數據進行分析并上報云端服務平臺,確定團霧的等級后,控制引導終端對高速公路車輛進行引導,并實時反映路況。
云端數據平臺對上傳的數據進行存儲、分析、道路監控,實現快速、準確的檢測,并及時通知道路管理部門,協同控制公路引導設施,并通過基站實時發布預警信息和路況,保護行車安全。
2 團霧檢測
2.1 溫度濕度傳感器
溫度濕度傳感器一般采用彈性吸濕聚合物薄膜材料作為敏感介質,濕度變化會引起負載質量、聲電作用以及粘彈性發生變化[10]。其線性動態范圍較大,可以測量相對濕度范圍為0~100%RH,精度在±3%RH的空氣濕度變化。溫濕度傳感器原理如圖2所示。
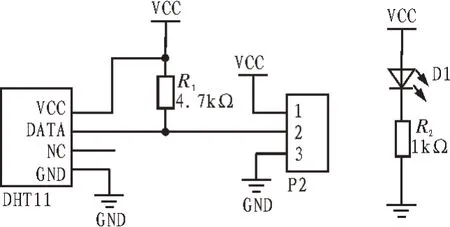
圖2 溫濕度傳感器原理圖
2.2 PM值傳感器
PM值傳感器利用其內部的光學灰塵傳感器(GP2Y1014AU0F),將安裝于對角線一端的一個紅外發光二極管開啟,另一端的光電晶體管用于檢測接收光強,即光強正比于檢測處粉塵濃度。PM值傳感器原理如圖3所示。
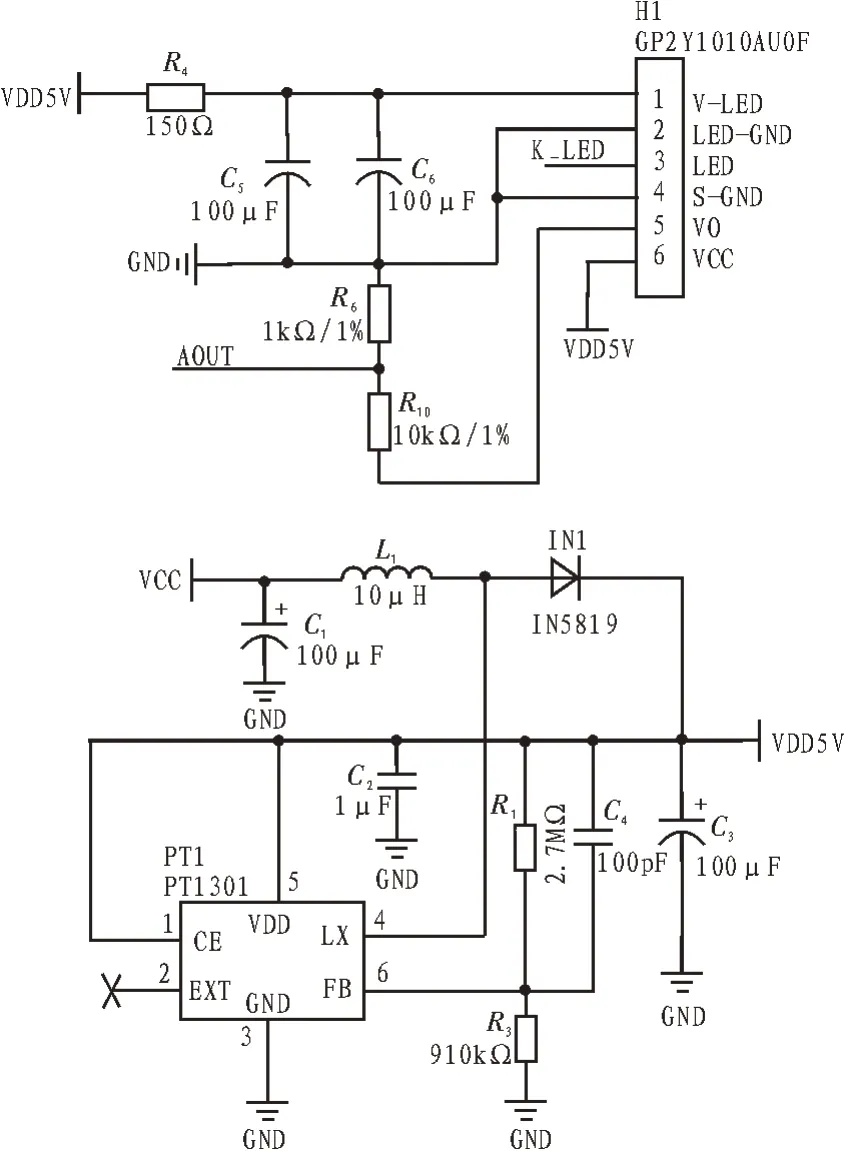
圖3 PM值傳感器原理圖
2.3 攝像頭
將光照射到感光陣列產生相應電荷,傳輸到相應的模擬信號處理單元,再由AD轉換為數字信號。攝像頭傳輸采用SCCB協議,其傳輸格式為起始位+ID地址+寄存器地址+數據+結束位。攝像頭先將圖像緩存到單片機上,再通過無線收發模塊將圖像上傳至上位機攝像頭,幀格式如表1所示。
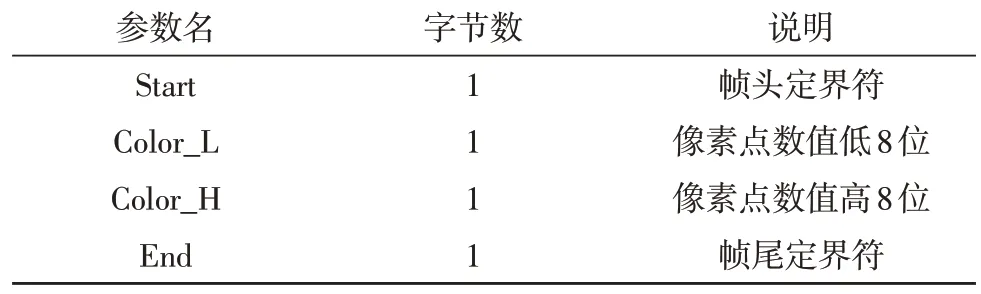
表1 攝像頭傳輸幀格式
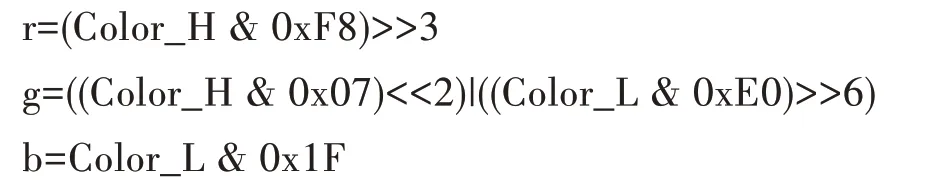
將數據幀轉化為R、G、B陣代碼,如下:
2.4 能見度儀
能見度儀可反映大氣透明度指標。根據Mie散射理論,得到大氣粒子散射角θ在20o~50o時,大氣粒子散射光強度I(θ)與大氣散射系數Ks和入射光強I0之間存在線性關系[11],如下:

氣象光學視程V可表示為:

其中,視覺對比度為ε,前向散射能見度儀可根據式(1)測量出Ks,進一步根據式(2)測量出氣象光學視程V。
2.5 無線收發模塊
無線收發模塊將數字電信號轉化為高頻電磁波發射出去,在接收端還原成電信號[12],其基本構成有振蕩器、調制器、變頻器、高頻功率放大器、天線。文中系統采用的模塊工作于441 MHz參數下,通信距離為3 000 m,可將MCU采集的傳感器數據實時上傳至云端服務平臺。
2.6 GPRS模塊
GPRS模塊可連接至周邊基站,若有緊急情況,則可向進入團霧范圍內的車輛發送短信,通知險情。
2.7 MCU主控
文中系統采用的處理器是STM32F103CET6核心版,其工作主頻為72 MHz,滿足了對傳感器數據采集、處理和發送的需求,并且有5個通用串口,用于連接各個模塊,并且自帶512K字節FLASH,滿足了數據緩存需求[13-15]。
3 團霧等級劃分
通過在多端高速路實地調研測試,并結合相關區域管控措施[16],研究給出了用于劃分團霧等級的指標,如表2所示。
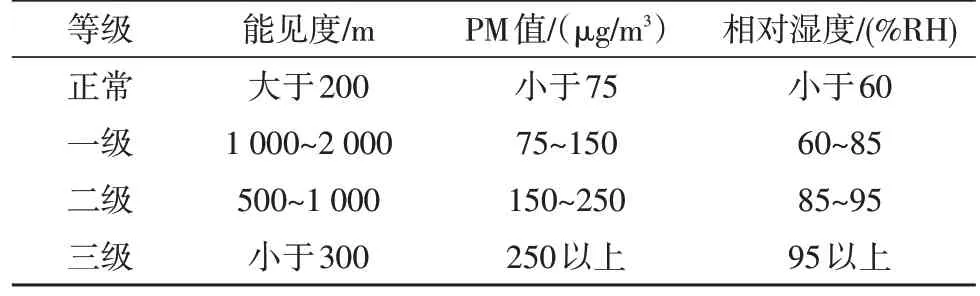
表2 團霧等級與指標
表2的3項指標中考慮了不同條件下團霧的形成,即由空氣顆粒物產生或者空氣中的水蒸氣產生。其中,任意兩項達到相應的數值范圍即可判定為相應的團霧等級。
4 數據處理與控制策略
4.1 軟件設計
軟件設計流程圖如圖4所示。
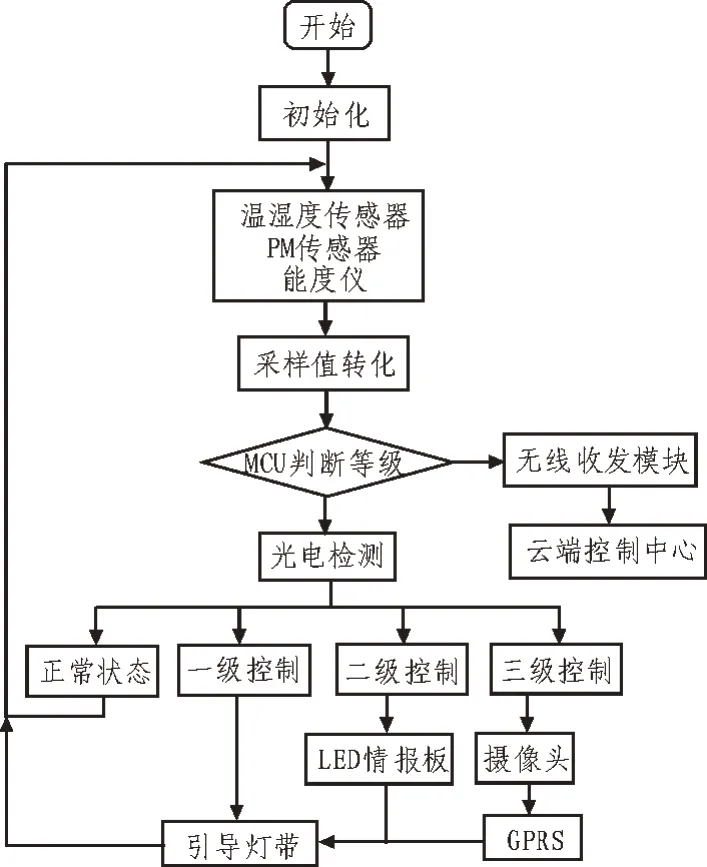
圖4 MC程序流程圖
1)初始化。開啟STM32的時鐘、串口、中斷、ADC和配置優先級,再進行溫濕度傳感器配置、PM傳感器初始化、能見度儀初始化。
2)采樣值轉化。通過定時中斷獲取各傳感器數值,并將ADC采樣的數值進行運算轉化,讀取串口幀格式獲取能見度,通過SCCB協議將攝像頭圖像緩存。
3)MCU判斷等級。STM32根據各傳感器數據,結合團霧等級劃分指標給出合理控制等級,并將數據封裝成幀交給無線收發模塊,進而發送至云端控制中心。
4)光電檢測與分級控制。光電檢測可判斷道路交通狀況和行車位置,然后控制誘導燈帶。LED情報板會根據團霧等級發布相應的公告,當達到3級時進一步啟動實時監控和GPRS模塊。
5)上位機接收數據。上位機通過無線收發模塊接收數據,并能做出處理。
4.2 控制策略
1)誘導。如圖5所示,誘導燈相聚50 m,當傳感器檢測到車輛后,會自動開啟前方兩個和后方一個誘導燈,讓車輛安全通過團霧區。若車輛在限定閾值時間內未通過下一個光電傳感器,則相應的誘導燈閃爍報警,并上報路況問題。后車可依據前方點亮的燈來判斷路況,同時跟前車保持安全距離。
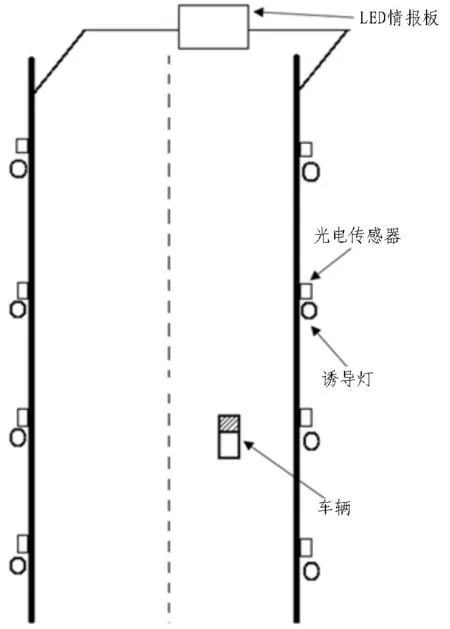
圖5 分級誘導系統
2)分級。達到一級時,啟用黃色誘導燈,定時上傳道路路況圖像;二級時,啟用紅色誘導燈,實時上傳路況圖像,LED情報板告警;三級時,啟用紅色誘導燈,實時上傳路況圖像情報板告警,道路限流。
5 系統測試結果
系統經過實驗室環境模擬以及陜西省內多段高速公路實地測試,相關系統參數如表3所示。
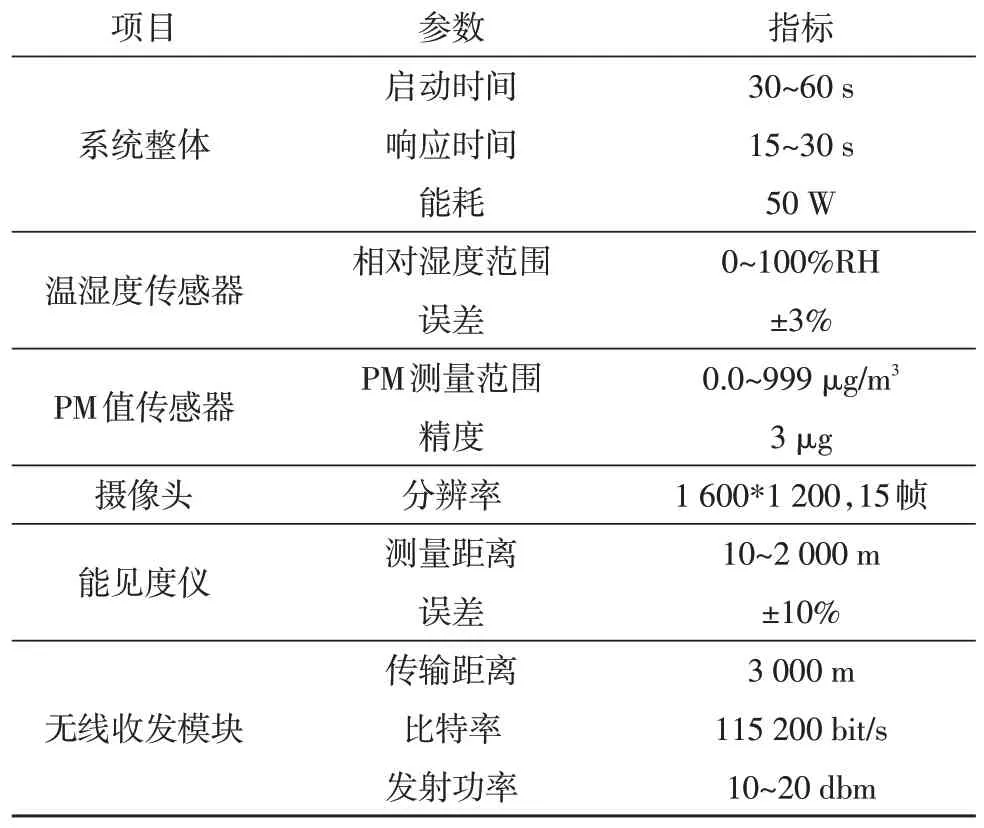
表3 系統各項參數
系統經過多次驗證,在實驗室模擬水汽環境下,溫、濕度傳感器在5 s內給出告警,能見度儀能捕捉變化。在實際高速公路測量中,PM傳感器捕捉的常規PM范圍在75~150μg/m3之間,常規大氣能見度在2 000 m以上。在有團霧出現時,由于形成條件不同,PM值會保持在150μg/m3或者能見度小于1 km,系統能正確捕捉攝像頭拍攝的畫面,在30 s內傳輸至上位機,并顯示相應路段交通狀況。
在道路控制部分,光電傳感器能夠判斷車輛位置,開啟相應誘導燈,當達到二級時,LED告示板就會發出警告;當達到三級時,GPRS模塊會向服務范圍內的手機發送短信通知。
6 結束語
文中主要實現了一種高速公路團霧天氣下預警和管控系統,此系統應用了多傳感器技術,能迅速準確地檢測出團霧天氣變化,并且滿足相應管控的基本需求。應用道路控制系統能實時管控車輛運行情況,并且保持了前后兩車的安全距離,為復雜天氣交通運輸提供了可靠的應用方案。相較于先前的研究[17-18],在系統響應速度上提升了50%,探測范圍提升了20%,具有實用價值和廣泛的參考意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國交通信息化(2016年9期)2016-06-06 07:42:10
海峽科技與產業(2016年3期)2016-05-17 04:32:12
小說月刊(2014年4期)2014-04-23 08:52:20