基于相對量測的分布式導彈協同定位算法
2021-09-08 03:05:08谷瓊瓊李英博
制導與引信 2021年2期
王 曼, 谷瓊瓊, 李英博, 劉 輝, 陳 琦
(上海無線電設備研究所,上海 201109)
0 引言
武器系統多導彈間通過共享彈間信息和分工合作的方式可以完成更高難度、更高精度、更高密度的攻擊和攔截任務,以應對瞬息萬變的戰場環境[1-4]。分布式協同制導是未來制導領域的重要發展方向。
分布式協同制導中如何實現高精度協同定位是其面臨的最大挑戰。在無法保證各導彈全連通、可通信和時間同步的情況下,精確地處理各導彈估計信息之間的相關性和耦合問題是提高定位精度的重要保障。如果忽略各導彈間的相關性,在獨立性條件下進行融合估計,或者互協方差估計不準確,將導致融合估計算法發散。明尼蘇達大學ROUMELIOTIS 團隊[5-6]基于卡爾曼濾波對機器人協同定位理論開展了一系列的研究工作,分析了基于卡爾曼濾波協同定位算法的定位誤差并證明了誤差的有界性。HUANG 等[7]探討了基于擴展卡爾曼濾波(extended Kalman filter,EKF)的協同定位算法估計的一致性問題,指出誤差狀態系統模型具有比實際非線性系統更高維的可觀測子空間,這將導致在沒有可用信息時,EKF方法中協方差的估計將不合理地減少,最終導致估計的不一致。空空導彈研究院的花文華[8]和何金剛[9]基于EKF 完成了視線角度量測下的協同濾波器的設計,增加了系統的可觀測性,完成了雙導彈系統的協同仿真。JULIER 等[10]提出了協方差交叉(covariance intersection,CI)信息融合方法,為協方差未知情況下的信息融合提供了一種解決辦法。 在此基礎上,CARRILLO-ARCE等[11]提出了基于協方差交叉算法的分布式多機器人協同定位算法,以降低信息處理和通信的復雜度。
本文從提高導彈協同制導精度出發,研究多導彈間協同定位算法。針對EKF 算法互協方差計算困難的問題,提出一種基于協方差交叉算法的分布式多導彈間信息融合和協同定位方法。通過建立多導彈狀態和量測模型,分析協方差交叉算法的誤差精度,仿真驗證該算法應用于導彈協同定位的可行性。
1 數學建模
考慮二階多導彈系統,針對二維平面內導彈的運動,建立彈目相對運動關系,如圖1所示。圖中,M i表示導彈i,Ta表示目標,v i表示導彈i的速度矢量,θi表示導彈i的視線角。

圖1 二維平面內彈目相對運動關系

其中



多導彈間正常通信是保證多導彈系統協同控制的重要前提。導彈間的通信可采用拓撲圖來描述。根據通信數據的流向可分為有向拓撲圖和無向拓撲圖,分別表示導彈單方面接收消息和彈間相互通信。本文所適用的彈間通信拓撲連接如圖2所示。該拓撲連接可由無向圖表示為g={ε,V}。其中,ε?V×V表示網絡的連接邊,V={1,2,…,N}表示N個參與協同的導彈節點。
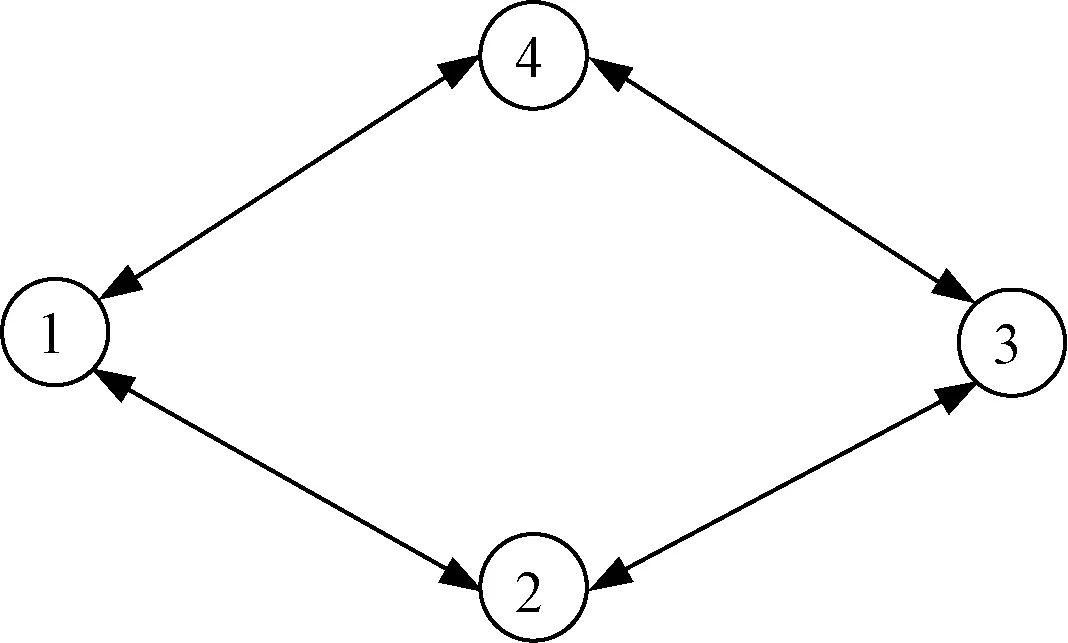
圖2 彈間通信拓撲連接圖
2 協同定位算法
2.1 協方差交叉算法及精度分析
對帶未知互協方差和有色量測噪聲的兩傳感器a和b的系統,設兩個傳感器對系統狀態的估計及其協方差陣分別為{^a,P aa},{^b,P bb},互協方差P ab未知。根據協方差交叉算法對上述兩個估計狀態進行融合,以得到系統更精確的狀態估計。融合后狀態估計和協方差陣記為{^c,P cc},根據協方差交叉算法,其計算公式為

式中:tr(·)表示矩陣的跡。該算法避免了計算互協方差這一計算量極大的步驟,大大降低了計算復雜度。但該算法適用的前提是融合估計的精度能滿足要求。


2.2 基于協方差交叉的協同定位算法
基于協方差交叉的分布式協同定位過程中,

圖3 濾波器協方差橢圓


鄰彈j將估計得到的導彈i的狀態和協方差

由2.1節可知,該多量測信息加權融合的協方差交叉算法估計結果具有有界誤差上界,且在每一次相對量測中計算和通信復雜度均為線性,算法對量測信息的同步性沒有嚴格要求,能夠處理異步通信情況。
3 仿真及結果分析
在MATLAB中建立協同定位系統模型,仿真條件設置為:導彈及目標位于同一平面,導彈枚數N=4,導彈速度v=200 m/s,4枚導彈隨機分布在距離目標約8 km 處,拓撲結構如圖2所示。導彈間的量測噪聲ξijk=[0,1,0.2]T,噪聲服從高斯分布。分別采用單獨導航定位(single localization,SL)算法、集中式擴展卡爾曼濾波(centralized extended Kalman filter,CEKF)算法以及本文所提CI算法對4枚導彈的分布式協同定位情況進行仿真。距離估計的均方根誤差計算公式為

各算法定位的均方根誤差曲線如圖4所示。

圖4 各算法定位均方根誤差曲線
由圖4可知,算法在網絡連通情況下,基于CI算法的協同定位精度低于CEKF算法,但是相對于SL算法,該算法的定位精度大大提高。綜合考慮其計算量小,通信量少,對系統通信要求低等優點,CI算法在工程應用中用途甚廣。
4 結論
本文基于多導彈量測信息共享的情況,提出了一種基于協方差交叉的分布式導彈協同定位算法,分析了該算法估計誤差的有界性。相比于SL算法,該算法提高了導彈的定位精度。相比于CEKF算法,該算法計算量小,通信量少,且支持異步通信,能更好地適應導彈應用場景。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28