CGTY-2型陀螺全站儀方位角測量實驗及其精度分析
2021-09-08 07:23:26倪先桃劉成龍
鐵道勘察 2021年4期
倪先桃 劉成龍 朱 曉
(1.中鐵二院工程集團有限責任公司,成都 610031; 2.西南交通大學地球科學與環境工程學院,成都 611756)
1 概述
在地理南、北緯度75°范圍內,陀螺儀可以實現任意測站點的真北方位測定[1-2]。陀螺定向測量不受天氣、時間以及測量環境等多種條件的限制,可廣泛應用于鐵路隧道、地鐵及礦山測量等工程建設。采用陀螺儀加測陀螺方位角的方法來檢核地下導線邊的方位,可有效限制地下導線邊方位角測量誤差的累積,進而提高地下導線的精度。
早期的陀螺經緯儀主要用于礦山測量領域,其定向精度較差,難以滿足大型地下工程建設需要[3-5]。隨著科學技術的不斷發展,高精度陀螺全站儀正逐步取代傳統的陀螺經緯儀,其尋北定向的效率有了明顯提升,但測量精度及穩定情況尚不明確[6-7]。已有學者進行相關研究,趙志紅針對我國在陀螺全站儀的研究與制造方面的現狀,對索佳陀螺全站儀的性能進行詳細實驗研究[8];石震等結合我國自主研發的GAT高精度磁懸浮陀螺全站儀,提出了一種基于高精度控制網比對法的陀螺精度評定方法[9-10];郭彩立等通過GYROMAT 3000陀螺全站儀在重慶軌道交通工程中的應用,對影響陀螺儀定向精度的因素及應對措施進行總結[11]。以下基于前人的研究,利用CGTY-2型陀螺全站儀進行方位角測量實驗,探尋其方位角測量的精度及穩定性情況,以期為長大鐵路隧道洞內平面控制網中合理地加測陀螺方位角提供指導意見[12-15]。
2 CGTY-2型陀螺全站儀工程控制網方位角測量實驗
為研究CGTY-2型懸掛帶式陀螺全站儀方位角測量的精度及穩定性,設計基于CGTY-2型陀螺全站儀的工程控制網方位角測量實驗,采用的工程控制網網形見圖1,其中D153-D155和D152-D154為模擬布設在隧道進出口處的已知邊,D146-D148和D165-D167為模擬布設在進洞及出洞方向的洞內平面控制網方位角待測邊。利用本次測量實驗中采集到的多源數據,對CGTY-2陀螺全站儀的方位角實測精度進行多方面比較分析。
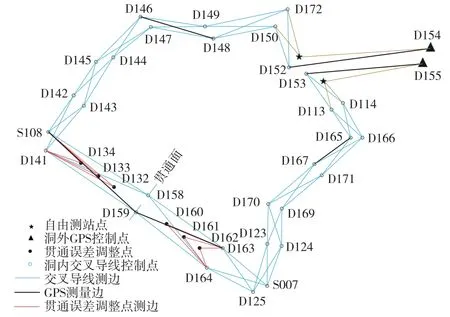
圖1 陀螺方位角測量實驗控制網網形示意
2.1 陀螺全站儀儀器常數定義
由于陀螺儀在安裝或調整不完善,使得陀螺儀軸的穩定位置(陀螺北方向NT)與地理子午線真北方向并不完全重合,兩者間的夾角即為陀螺全站儀的儀器常數Δ。坐標北方向、陀螺北方向、真北方向與觀測邊OP之間的關系見圖2,其中,γ0為O點的子午線收斂角。
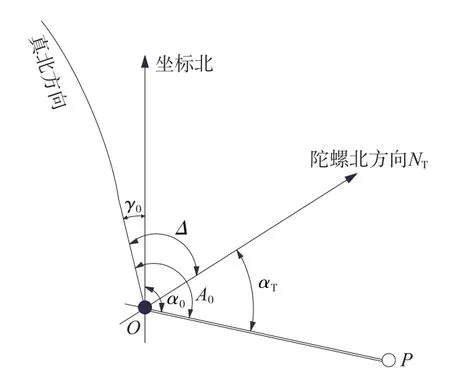
圖2 三北方向關系及儀器常數示意
當陀螺全站儀架設在地面點O,在已知方位角的觀測邊OP上進行定向測量時,對于OP邊的坐標方位角α0、陀螺方位角αT及地理方位角A0,有
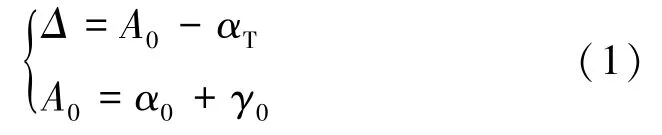
式中,α0為地面已知邊的坐標方位角;γ0為測站O的子午線收斂角。對于確定的陀螺全站儀,可認為在短期時間內其儀器常數Δ是穩定的。對于地下待測邊,上述關系依舊成立,則有
將式(2)代入式(1),有

為方便儀器常數計算,將子午線收斂角計算與儀器常數區分開。定義常數C=(α0-αT),則

式中,α1為地下待測邊的坐標方位角;Δγ為地面方位角已知邊測站點和地下待測邊測站點的子午線收斂角差值;為在待測邊上測得的若干次陀螺方位角均值;邊坐標方位角α0可由該邊兩端點的坐標反算得到。由上可知,陀螺全站儀儀器常數的測定精度對未知邊坐標方位角測量成果的精度將會產生直接影響。
2.2 陀螺全站儀儀器常數的測定
根據TB 10101—2018《鐵路工程測量規范》中相關要求,本次實驗采用“陀螺全站儀先在地面已知邊進行陀螺方位角測量,再在地下待測邊進行陀螺方位角測量,最后再把陀螺全站儀搬回到地面已知邊進行陀螺方位角測量”的測量流程,若前后兩次測定的儀器常數互差滿足規范限差要求,則取兩次測定常數的最或是值作為儀器常數測定的最終成果。
本次實驗陀螺全站儀方位角測量具體流程為:在模擬的隧道洞內待測邊(控制邊D146-D148和D165-D167)陀螺方位角定向測量前,先在地面已知邊D153-D155上測定儀器常數,然后進行洞內待測邊的定向測量,最后再回到地面另外一條已知邊D152-D154上再次測定儀器常數,實驗過程中,這兩條地面已知邊的坐標方位角通過GNSS靜態相對定位測量方法獲得,然后再按照上述測量流程,對洞外已知邊和洞內待測邊進行返測。
為深入分析陀螺全站儀儀器常數的特性及其精度情況,在兩條洞外已知邊上進行了3次往、返陀螺方位角測量,在洞內待測邊上進行了兩次往、返陀螺方位角測量,每次測量3個測回。由于本次實驗只采用一臺陀螺全站儀進行觀測,每個測站觀測完成之后的儀器搬站、重新架設、整平、儀器預熱及尋北定向測量都需要花費時間,故3次觀測在時間上不連續;同時,對于同一條觀測邊其往、返觀測在時間上也不連續。
兩條已知邊上的3次往、返觀測陀螺方位角觀測值統計結果見表1、表2(已知坐標方位角:66°40′04.4″和66°09′15″),其中ΔαT為測回間陀螺方位角較差最大值的絕對值。
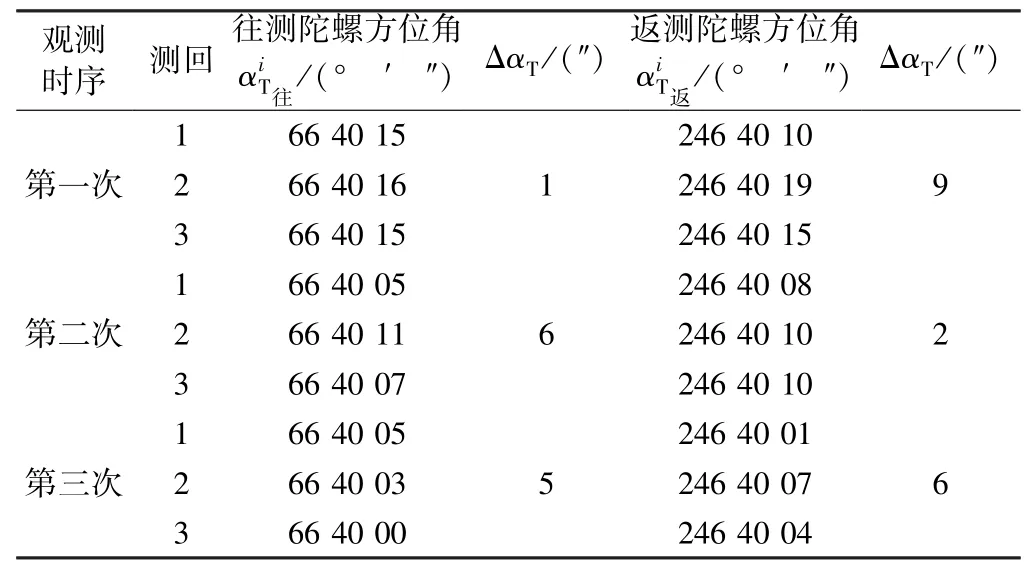
表1 已知邊三次往、返測陀螺方位角觀測值統計結果(觀測邊D153-D155)
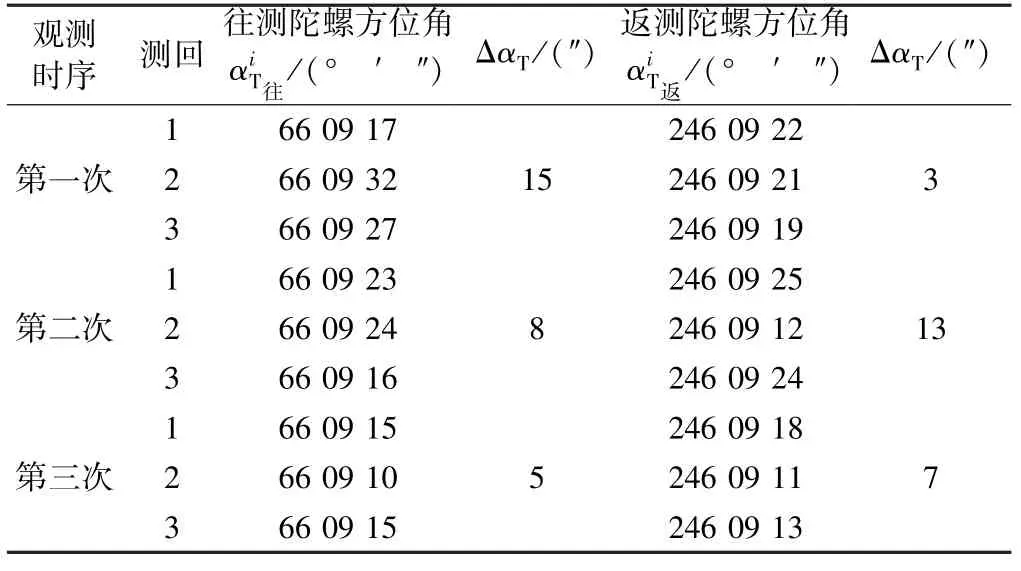
表2 已知邊三次往、返測陀螺方位角觀測值統計結果(觀測邊D152-D154)
根據TB 10101—2018《鐵路工程測量規范》中的相關要求,若定向測量采用的陀螺全站儀標稱精度不低于±5″,則獨立測回間的陀螺方位角較差不應大于15″,兩次測定的陀螺全站儀儀器常數較差不應大于±8″。由表1可知,在任意時段內,測回間的陀螺方位角較差都滿足規范中不大于15″的要求,但有的時段已經非常接近限差。
在兩條已知邊上由觀測的陀螺方位角觀測值計算的儀器常數Δ1和Δ2、Δ1與Δ2較差和Δ1與Δ2的均值ˉΔ見表3,其中Δ1、Δ2分別為在已知邊D153-D155、D152-D154上測定的儀器常數,因CGTY-2型陀螺全站儀的標稱精度為±3.6″<±5″,故根據相關規范的要求,Δ1與Δ2較差的限差應為±8″。
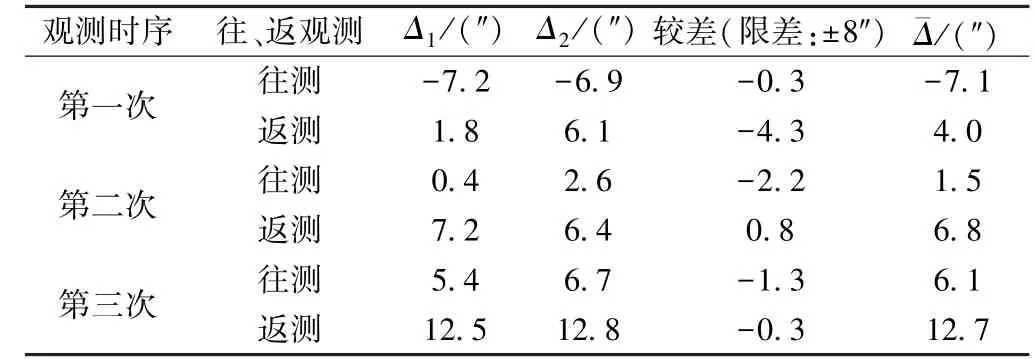
表3 儀器常數測定結果統計
由表3可知,雖然本次實驗同一次同一條邊往、返測的儀器常數較差均滿足相關規范的要求,但是不同時間段儀器常數較差變化較大。初步分析認為,陀螺全站儀的儀器常數可能隨時間推移而發生變化,測定的儀器常數因此具有某種“時效性”;另外,儀器常數必須依靠儀器本身來進行測定,其測定的精度與所使用儀器的定向精度、儀器的穩定性和可靠性、測量環境的變化以及已知邊坐標方位角是否準確等密切相關,也不能排除上述因素導致這種差異出現的可能性。
3 陀螺全站儀方位角測量精度分析
測定儀器常數后,就可以對待測邊的陀螺方位角觀測值進行儀器常數改正和子午線收斂角之差改正,最后得到待測邊的陀螺全站儀坐標方位角測量成果。陀螺方位角測量實驗前,先對上述已知邊、待測邊的兩端控制點都進行了GNSS靜態相對定位觀測,參照TB10601—2009《高速鐵路工程測量規范》中一等GNSS平面網測量的精度要求,以待測邊平差后的GNSS方位角作為基準值,然后將待測邊的陀螺全站儀坐標方位角測量結果與GNSS測量的方位角結果進行對比,進而分析本次實驗通過陀螺全站儀測量得到的坐標方位角的外符合精度;除此之外,為對洞內待測邊的陀螺方位角觀測值進行內符合精度分析,本次實驗對洞內待測邊也進行往、返陀螺方位角測量。
3.1 陀螺方位角測量結果內符合精度分析
通過對同一觀測邊進行往、返陀螺方位角觀測結果的比對來進行內符合精度分析,該方法無需獲得觀測邊的坐標方位角真值,同時也不需要事先測定陀螺全站儀的儀器常數,以及進行儀器常數改正、子午線收斂角之差改正等數據處理,這樣得到的陀螺全站儀方位角測量結果的內符合精度比較客觀。內符合精度檢測與儀器常數Δ的測定過程是一致的,因此,也可通過已知邊往、返測的陀螺方位角進行內符合精度分析。往、返測陀螺方位角與方向閉合差ωi之間有

對本次實驗中4條觀測邊的往、返測陀螺方位角按照式(5)計算后,即可得到CGTY-2陀螺全站儀方位角測量內符合精度情況,結果見表4。
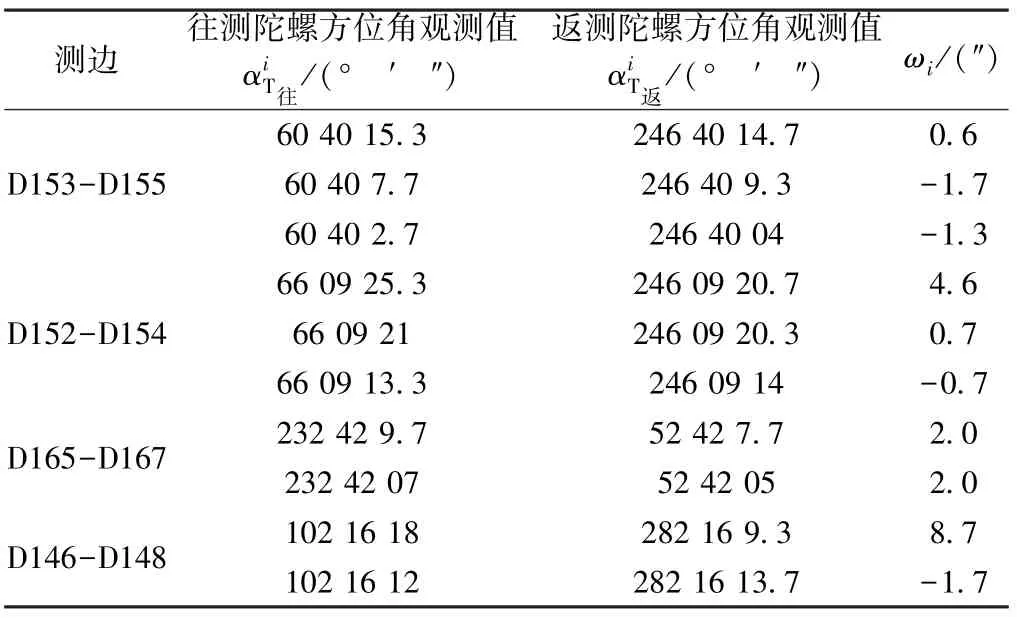
表4 CGTY-2陀螺全站儀方位角測量內符合精度分析
由表4可知,方向閉合差ωi的一次定向中誤差為
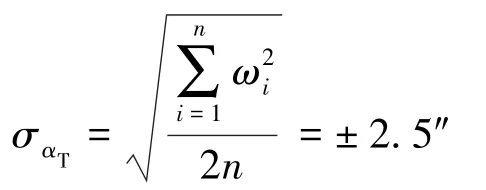
可見本次實驗得到的CGTY-2型陀螺全站儀一次定向的中誤差為±2.5″,優于該型號儀器的標稱精度±3.6″。顧及到儀器對中誤差和測量環境變化等對陀螺全站儀定向測量的不利影響,可以認為此次實驗中CGTY-2陀螺全站儀的定向結果內符合精度較好。雖然陀螺全站儀測量的方位角內符合精度與儀器尋北定向的穩定性和可靠性相關,但其并不能完全代表陀螺全站儀方位角測量的精度和穩定性,還需要對其定向測量的外符合精度情況進行分析。
3.2 陀螺方位角測量結果外符合精度分析
由式(4)可知,想要獲得待測邊的坐標方位角成果,在對待測邊的陀螺全站儀陀螺方位角觀測值進行儀器常數改正的基礎上,還需要對其進行子午線收斂角之差改正。關于子午線收斂角的定義及推導計算,相關教材已有詳細介紹,其計算公式如下
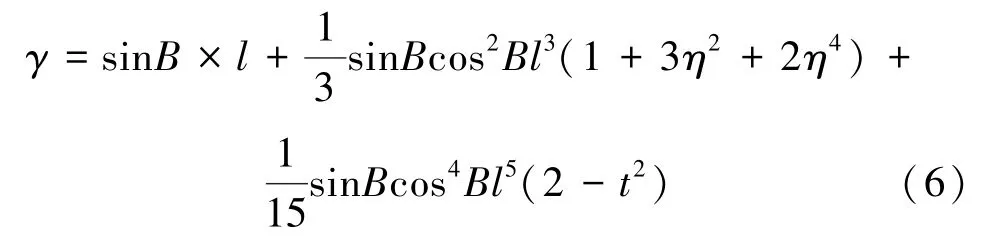
式中,B為緯度;l為經差;t=tanB;η=e′cos2B;e′為橢球第二偏心率。實際工程應用中,常常取上式的第一項來進行近似計算,故子午線收斂角簡易計算公式為

已有研究表明,當經差為3.5°時,由式(7)計算的子午線收斂角精度可以達到0.6″~0.01″。實際工程中,一般隧道工程各個控制點之間的經差都在1°以下,本次實驗的控制網中各個控制點間經差遠小于1°,故上述簡化計算公式可以滿足本次實驗計算的精度要求。由此,子午線收斂角差值Δγ簡化公式為

式中,l已知、l待測分別為已知邊、待測邊上測站點與中央子午線的經差,可由高斯坐標反算得到;B已知、B待測分別為已知邊、待測邊上測站點的緯度,也可由高斯坐標反算得到。由式(8)可知,子午線收斂角差值與投影坐標系中央子午線的位置無關,只與兩次儀器架設點與中央子午線的經差、兩次儀器架設點的緯度有關。
對待測邊D165-D167、D146-D148兩個時段的往、返測陀螺方位角觀測值進行儀器常數改正和子午線收斂角之差改正后,由式(4)計算得到待測邊陀螺全站儀測量的坐標方位角,再將其與GNSS方位角對比進行外符合精度分析,分析情況見表5。
依據表5中的較差Δi,CGTY-2陀螺全站儀一次定向的標準差為
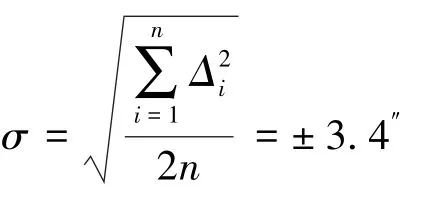
相較于該型號儀器的標稱精度一次定向標準差±3.6″,本次實驗的陀螺全站儀坐標方位角測量精度為3.4″,與其標稱精度基本吻合。
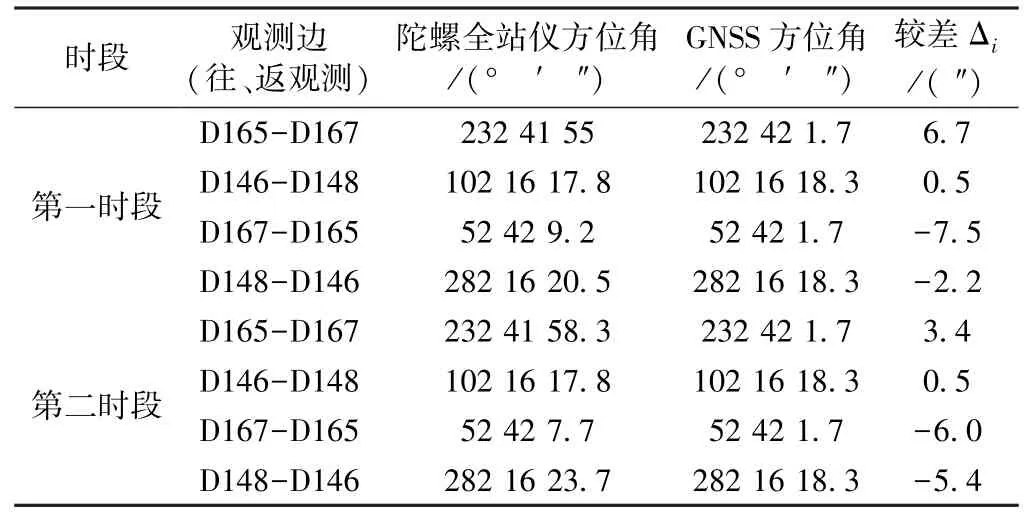
表5 CGTY-2陀螺全站儀坐標方位角測量外符合精度分析
4 結語
通過CGTY-2陀螺全站儀方位角測量實驗及其實驗結果的對比分析,得到以下主要結論。
(1)至少在2條已知邊上進行陀螺全站儀的儀器常數檢測,當其儀器常數較差滿足要求后,應取均值作為最后結果,并對待測邊所測的陀螺方位角進行儀器常數改正。
(2)不論是已知邊上的儀器常數檢測,還是待測邊上的陀螺方位角測量,每條邊上的陀螺方位角測量均應進行往返測,然后取往返測的陀螺方位角均值作為觀測邊的陀螺方位角測量結果。
(3)在任意時段內,測定的陀螺全站儀儀器常數較差應滿足規范要求,測回間的陀螺方位角較差,亦能滿足規范限差要求。
(4)陀螺全站儀的儀器常數會隨著時間的推移而產生變化,測量環境的變化也會對儀器常數測定產生影響,故規范儀器的外業測量操作、選擇合適的觀測環境十分重要。
(5)采用陀螺全站儀加測地下導線邊陀螺方位角,其操作便捷,精度可靠,儀器性能穩定,測量效率較陀螺儀有大幅度提升,可以在鐵路隧道、地鐵及礦山測量等地下工程中推廣應用。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
電測與儀表(2016年9期)2016-04-12 00:29:52