基于Freeman 鏈碼改進(jìn)圖像處理算法的指針式儀表識別
2021-09-08 07:53:16李貴良陳德帛羅新元羅永盛
自動(dòng)化儀表 2021年7期
李貴良,李 博,陳德帛,羅新元,郭 祥,羅永盛
(云南電網(wǎng)有限責(zé)任公司,云南 昆明 650041)
0 引言
隨著大數(shù)據(jù)時(shí)代的到來和“工業(yè)4.0”的提出與實(shí)施,各類數(shù)字儀表(如電流表、電壓表)在日常生活、學(xué)習(xí)與工作中的使用數(shù)量急速增多。 在我國智能化道路發(fā)展速度加快的背景下,機(jī)器人已逐步替代了傳統(tǒng)人工作業(yè)。 這也在一定程度上擴(kuò)大了指針式儀表的應(yīng)用范圍[1-3]。 但指針式儀表存在不足之處,如電磁干擾、數(shù)據(jù)變化過快等[4]。 針對上述情況,有學(xué)者提出了基于Freeman 鏈碼圖像處理算法的指針式儀表識別技術(shù)。 研究表明:該技術(shù)整體效果優(yōu)異,可惜尚未得到推廣與普及[5-6]。 本文以上述研究為基礎(chǔ)改進(jìn)了該算法,并進(jìn)行了試驗(yàn)驗(yàn)證。
1 基于Freeman 鏈碼改進(jìn)圖像處理算法的圖像描述
圖形學(xué)理論認(rèn)為:視頻圖像的輪廓中,每個(gè)點(diǎn)至少存在1 個(gè)方向與8 個(gè)鏈碼方向之一相互對應(yīng);每個(gè)像素點(diǎn)與其相鄰像素點(diǎn)的8 個(gè)方向便可視作8 個(gè)鏈碼值。 如按一定順序?qū)ζ溥M(jìn)行標(biāo)記,便可形成最終集合,即Freeman 鏈碼[7]。 假設(shè)閉合曲線值起始位置后的第i個(gè)像素的鏈碼值為ai,ai∈{0,1,...,7},L、L1分別代表某像素點(diǎn)、要跟蹤的像素,此時(shí)滿足ai=1。 若將起始點(diǎn)記作L0、終點(diǎn)記作L7,按標(biāo)記順序?qū)?biāo)記點(diǎn)圖像并應(yīng)用Freeman 鏈碼掃描,便可形成矩陣鄰域的一次鏈碼整理。 Freeman 鏈碼的方向取值如圖1 所示。
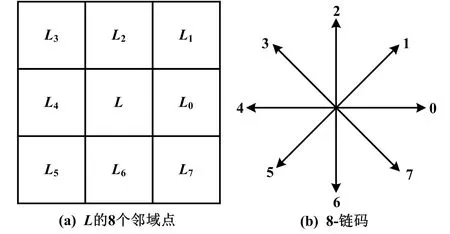
圖1 Freeman 鏈碼的方向取值Fig.1 Direction value of Freeman chain code
由圖1 可知,若將矩陣鄰域看作不同的點(diǎn)并將其邊緣按一定順序連接起來,便可形成Freeman 鏈碼邊緣表述。 根據(jù)圖像處理理論進(jìn)行圖像信息描述。 其中:將特征信息部分像素視作1、背景像素視作0,按從下至上、從左往右的方式尋找像素值為1 的點(diǎn)。 將L0(a)下一個(gè)搜索點(diǎn)的灰度值看作1,并將其命名為起始點(diǎn)左上方的像素點(diǎn)。 按順時(shí)針方向每次旋轉(zhuǎn)45°,依次重復(fù)上述步驟直至找到起始點(diǎn)為止。 Freeman 鏈碼的邊緣表述與鄰域如圖2 所示。
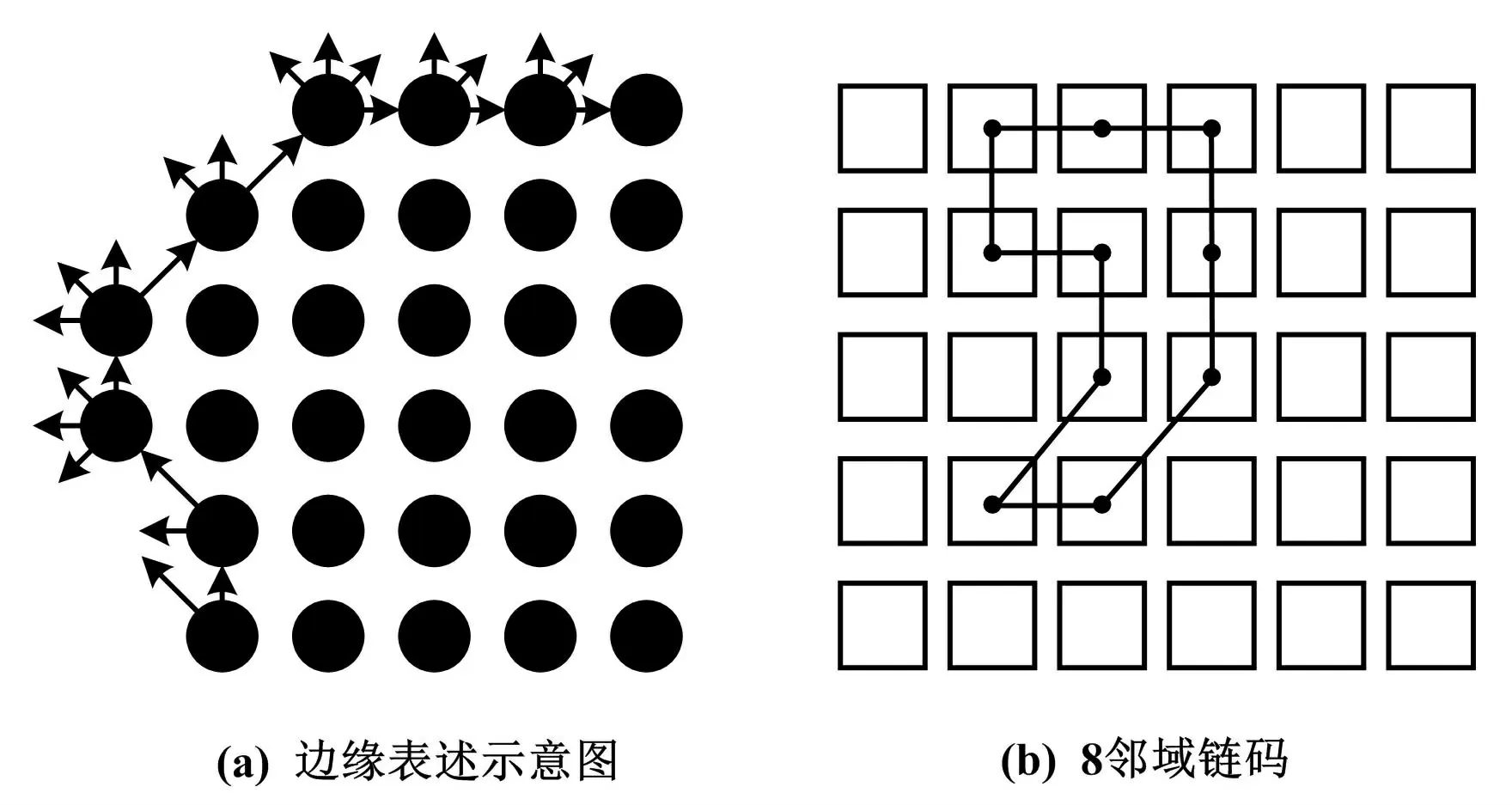
圖2 Freeman 鏈碼的邊緣表述與鄰域Fig.2 Edge representation and neighborhood of Freeman chain codes
由圖2 可知,影響圖像處理中Freeman 鏈碼分割效果好壞的因素主要是種子點(diǎn)、生長原則和終止條件。基于Freeman 鏈碼改進(jìn)圖像處理算法的區(qū)域生長過程如圖3 所示。 由圖3 可知,不同生長原則下的圖像生長區(qū)域與結(jié)果均不同,且二者均受灰度值、紋理、顏色、梯度等因素的影響。

圖3 基于Freeman 鏈碼改進(jìn)圖像處理算法的區(qū)域生長過程示意圖Fig.3 Regional production process of improved image processing algorithm based on Freeman chain code
在圖3 的基礎(chǔ)上,假設(shè)Freeman 鏈碼改進(jìn)圖像處理算法中的圖像I的生長區(qū)域?yàn)镽,Np為像素p的鄰域,其中兩個(gè)像素p、q(p∈R,q∈Np)之間的距離為dpq,應(yīng)用歐幾里法得出距離為ρ。 當(dāng)ρ=1 時(shí),Freeman鏈碼改進(jìn)圖像處理算法中的圖像的矩陣呈四鄰域狀態(tài)。 式(1)、式(2)表示不同限制條件下的兩類像素集。

2 基于Freeman 鏈碼圖像處理算法的改進(jìn)
2.1 基于Freeman 鏈碼圖像處理算法優(yōu)化
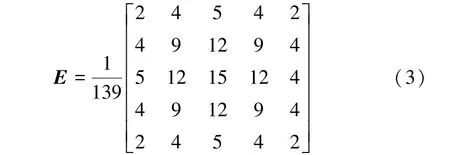
噪聲是影響指針式儀表性能的主要因素,也是其試驗(yàn)預(yù)處理中的關(guān)鍵環(huán)節(jié)[8]。 指針式儀表識別技術(shù)的應(yīng)用通常會(huì)涉及邊緣檢測,主要包括濾波檢測、增強(qiáng)邊緣、效能檢測3 個(gè)步驟。 為改進(jìn)基于Freeman 鏈碼圖像處理算法,本文將引入約翰·肯尼(John Canny)邊緣算法,對指針式儀表性能中存在的不足之處進(jìn)行優(yōu)化處理[9-10]。 設(shè)標(biāo)準(zhǔn)差為E(滿足1.4 的5×5 高斯函數(shù)內(nèi)核),如式(3)所示。
依照Sobel 濾波器操作步驟,使用以下卷積矩陣,即可得式(4)。
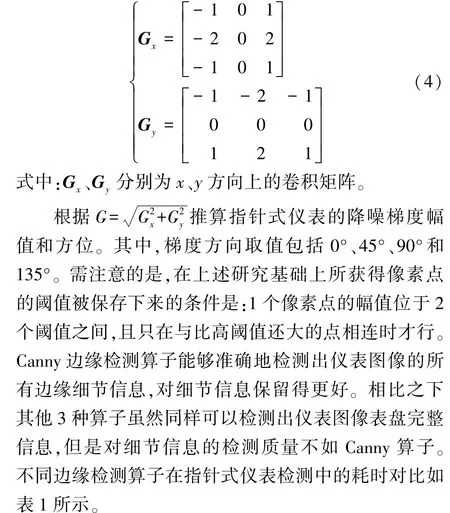
由表1 可以看出,Canny 算子、Sobel 算子在基于Freeman 鏈碼圖像處理算法中各有優(yōu)勢,但方框?yàn)V波和均值濾波處理下的指針式儀表圖片過于模糊,高斯濾波處理下的指針式儀表圖片關(guān)鍵信息缺失。 此次研究最終決定使用Canny 算子、Sobel 算子作為本文的預(yù)處理方法。 霍夫線變換原理如式(5)所示。
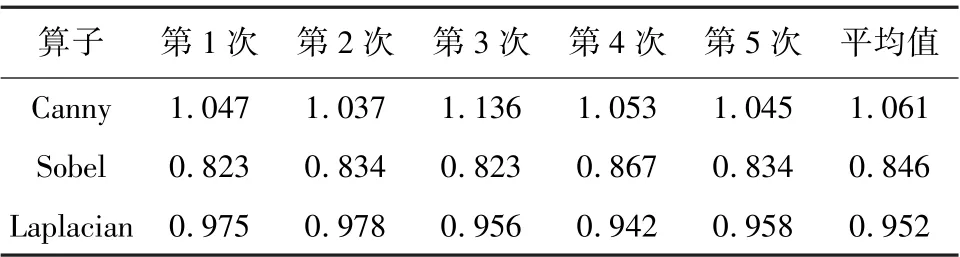
表1 不同邊緣檢測算子在指針式儀表檢測中的耗時(shí)對比表Tab.1 Time consumption comparison of different edge detection operators in pointer instrument detection s
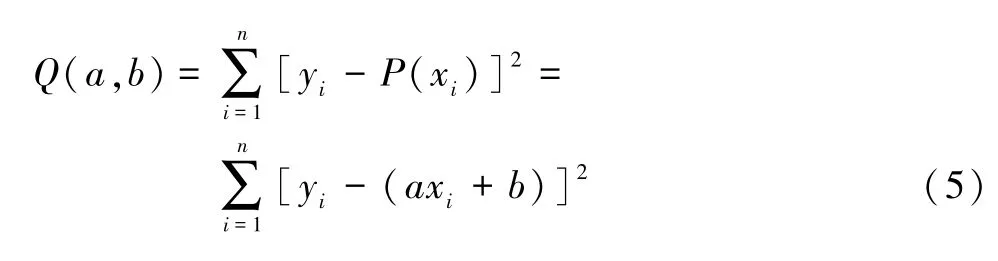
式中:i為指針式儀表中的任意正整數(shù);(xi,yi)為提取的像素點(diǎn);P(xi)=axi+b為數(shù)點(diǎn)所連成的直線,a、b分別為斜率、截距;Q(a,b)為函數(shù)駐點(diǎn);n為像素點(diǎn)數(shù)。需注意的是,若Q(a,b)梯度為0 時(shí),點(diǎn)(a,b)需滿足以下兩個(gè)條件,如式(6)所示。

對式(6)求解,得a、b的方程組,最終可得滿足指針式儀表中的像素點(diǎn)直線方程:y=ax+b。 為判定直線(霍夫變換)是否與x軸垂直,設(shè)β為任意小的正數(shù)。在此條件下若絕大多數(shù)像素點(diǎn)的橫坐標(biāo)值均在(x-β)~(x+β)之間,則上述基于Freeman 鏈碼圖像處理算法的假設(shè)成立。 同時(shí),將直接坐標(biāo)系調(diào)換為yOx,并將y設(shè)為橫坐標(biāo),可得直線方程:x=cy+d。 表盤直角坐標(biāo)系如圖4 所示。
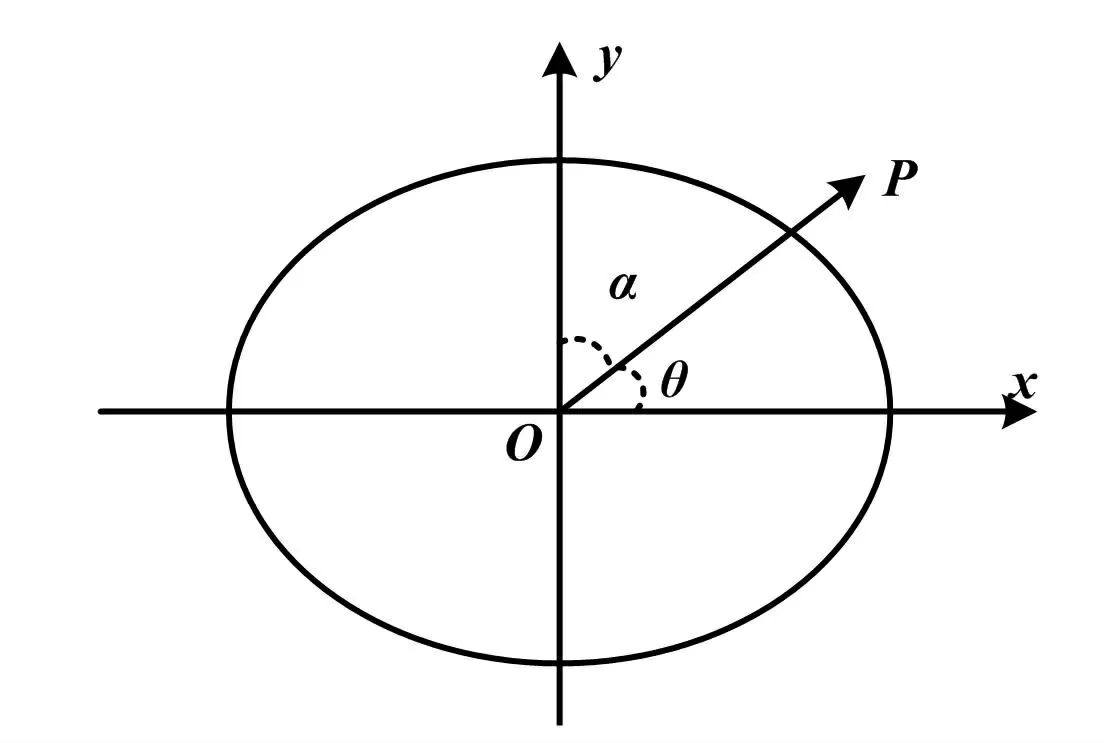
圖4 表盤直角坐標(biāo)系Fig.4 Dial rectangular coordinate system
如圖4 所示,設(shè)圓心點(diǎn)(x,y)和半徑r構(gòu)成的三維空間的圓的2 個(gè)直線的參數(shù)分別為r、θ,圓心為(xcenter,ycenter,r)。 刻度值計(jì)算如式(7)所示。
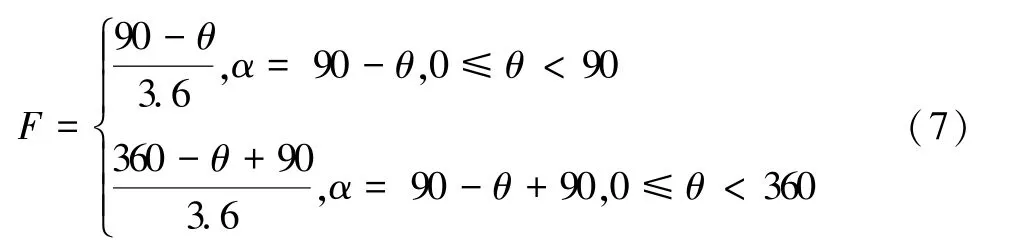
式中:θ、α分別為提取角度、零刻度與指針CP的夾角,每一度的刻度值(F)為1/3.6。
設(shè)經(jīng)過Freeman 鏈碼處理后的特征圖像,得λ 取值計(jì)算式,如式(8)所示。

式中:λ為方向鏈碼占比;an為8 個(gè)不同方向的鏈碼,n=0,1...,7。
當(dāng)特征方向鏈碼占比大于所有鏈碼75%(即T=0.75)時(shí),在式(8)的基礎(chǔ)上繼續(xù)設(shè)指針式儀表的指針的2 個(gè)定點(diǎn)與底點(diǎn)所在的位置分別為ppeak、pbottom,即儀表指針的直線;而指針直線的傾斜角度定義為θ。 按式(9)所示的反三角函數(shù)即可求出θ。
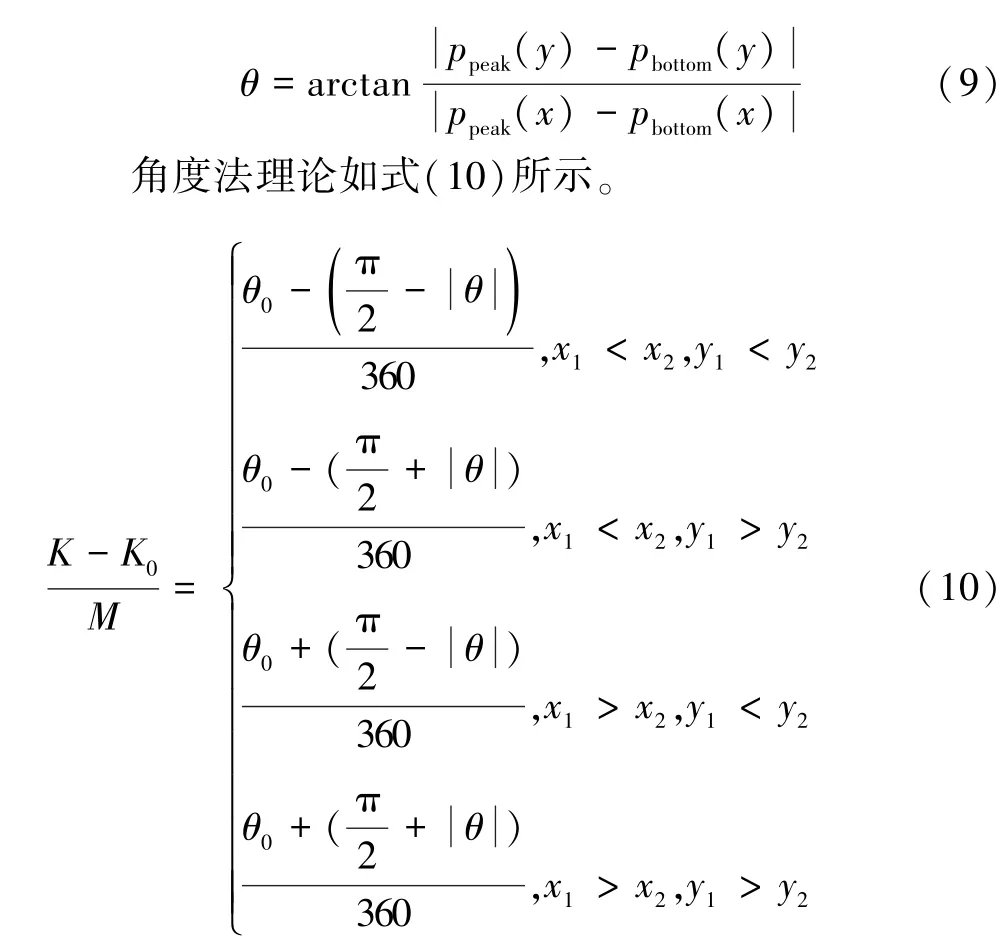
式中:θ、θ0分別為待測指針偏轉(zhuǎn)角度、指針量程最小值與指針指向表盤中間位置的偏轉(zhuǎn)角度;K、K0分別為待測指針示數(shù)、待測指針示數(shù);(x1,y1)、(x2,y2)分別為指針的2 個(gè)坐標(biāo);M為儀表指針旋轉(zhuǎn)一周的理論測量值。

需注意的是,由于式(10)存在2 種不同方向,即水平與豎直方向,故還需滿足式(11)。
綜合經(jīng)灰度化處理、濾波增強(qiáng)、邊緣檢測、Freeman鏈碼處理后的各項(xiàng)數(shù)據(jù)可知,Canny 算子雖然圖像處理時(shí)間相對較長,但能更直觀地反映儀表的數(shù)值。 指針式儀表示數(shù)識別如圖5 所示。
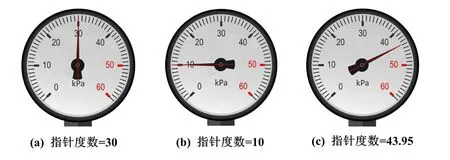
圖5 指針式儀表示數(shù)識別圖Fig.5 Indication recognition diagram of pointer instrument
接著對本文算法的識別準(zhǔn)確性進(jìn)行驗(yàn)證,得出不同算法下的儀表示數(shù)對比如表2 所示。 由表2 可知,將上文中的霍夫變換算法與本文中的基于Freeman 鏈碼改進(jìn)圖像處理算法用于自指針式儀表的示數(shù)識別結(jié)果進(jìn)行對比后,發(fā)現(xiàn)本文算法的耗時(shí)均高于霍夫變換算法。 本文算法最大相對誤差為0.04%,而霍夫變換算法的最大相對誤差為1.23%。 故相較而言,本文提出的基于Freeman 鏈碼改進(jìn)圖像處理算法在指針式儀表的應(yīng)用中的性能更好。
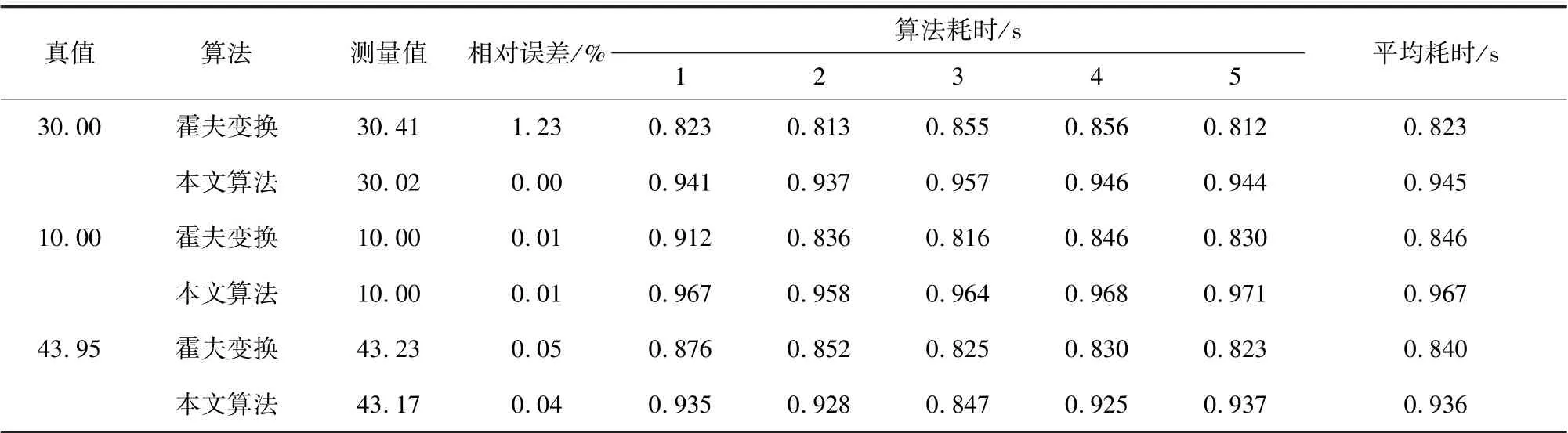
表2 不同算法下的儀表示數(shù)對比Tab.2 Comparison of instrument indication under different algorithms
2.2 基于Freeman 鏈碼圖像處理算法的二次校正
透視投影、平行投影是目前圖像處理領(lǐng)域中應(yīng)用較多的2 種圖像處理投影方法,可實(shí)現(xiàn)從三維立體信息到二維平面信息的轉(zhuǎn)換。 透視投影的標(biāo)準(zhǔn)幾何模型與透視變換模型如圖6 所示。 相較而言,如圖6(a)所示的透視投影作為攝像機(jī)捕獲圖像信息的標(biāo)準(zhǔn)幾何模型,應(yīng)用價(jià)值較平行投影更高。 但由于不同角度拍得的圖像不同,畸變也不一樣。
當(dāng)視點(diǎn)為E時(shí),平面物體(P)必須穿過P1才能觀察得到,這便是常規(guī)的透視圖模型。 但若投影視角存在一定傾斜時(shí),圖像便會(huì)畸變。 而在透視變換后,圖像所對應(yīng)的點(diǎn)也會(huì)隨之改變。 如圖6(b)所示,即A1→A、B1→B、C1→C和D1→D。
為有效校正圖像畸變,設(shè)變換圖6 參數(shù)分別為a、b、c、d、e、f、g、h,并按由左往右進(jìn)行適當(dāng)校正,如式(12)所示。
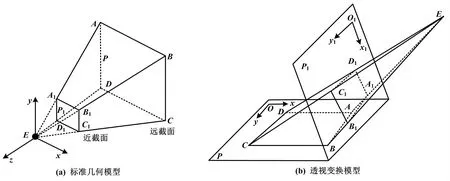
圖6 透視投影的標(biāo)準(zhǔn)幾何模型與透視變換模型Fig.6 Standard geometric model and perspective transformation model of perspective projection
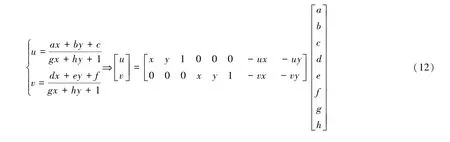
式中:(x,y)、(u,v)分別為變換前坐標(biāo)、變換后坐標(biāo)。
根據(jù)式(12)找到透視圖與正視圖的4 個(gè)對應(yīng)點(diǎn)的投影圖坐標(biāo)(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4)和正視圖坐標(biāo)(u1,v1)、(u2,v2)、(u3,v3)、(u4,v4),并設(shè)變換參數(shù)為M,Z=AM、M=A-1Z,F=PM,如式(13)所示。
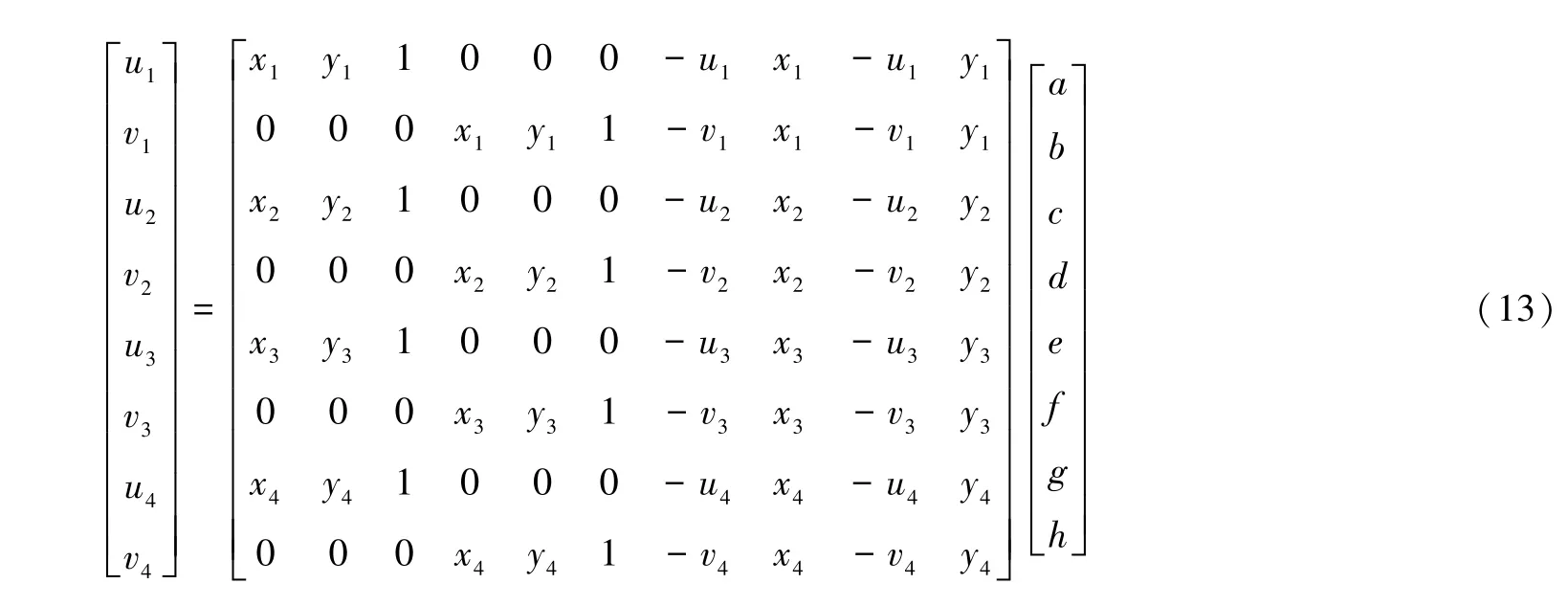
根據(jù)式(13)可求出基于Freeman 鏈碼圖像處理算法的透視變換矩陣。 通過對最左邊至最右邊的4個(gè)圖分別進(jìn)行校正,即選取一次校正后圓上的4 個(gè)匹配點(diǎn),分別作圓在這4 個(gè)校正點(diǎn)方向的切線,使其在不同階段均形成1 個(gè)新的矩陣,并分別對傾斜圓進(jìn)行校正。 根據(jù)式(12)、式(13)進(jìn)行計(jì)算,即可實(shí)現(xiàn)對圖像的二次校正。 傾斜至二次校正的變化過程如圖7 所示。
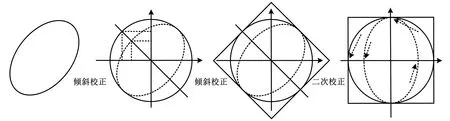
圖7 傾斜至二次校正的變化過程Fig.7 Change process of tilt to secondary correction
3 試驗(yàn)結(jié)果驗(yàn)證與分析
3.1 基于本文算法的指針式儀表的斜率校正驗(yàn)證
在指針式儀表的圖像識別過程中,水平、垂直和混合傾斜是影響指針式儀表自動(dòng)識別的主要原因。 所獲圖像可能存在傾斜,這是其圖像畸變的主要因素[11-12]。 在此進(jìn)行斜率校正驗(yàn)證,不同刻度值下的指針識別結(jié)果如表3 所示。
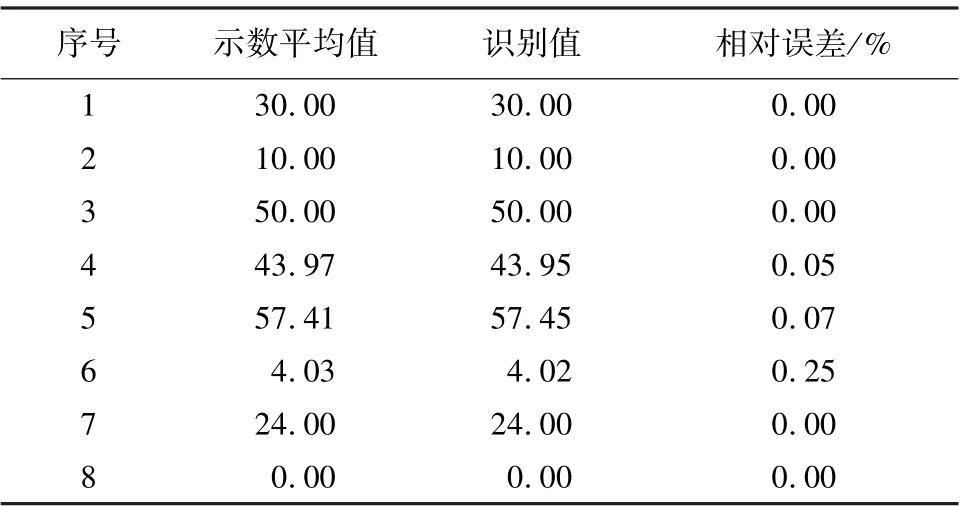
表3 不同刻度值下的指針識別結(jié)果Tab.3 Pointer recognition results under different scale values
由表3 可知,相較于人眼宏觀度數(shù)識別,本文所提出的基于Freeman 鏈碼改進(jìn)圖像處理算法的指針式儀表識別技術(shù)的準(zhǔn)確性、可靠性均更接近真實(shí)值。 傾斜校正效果如圖8 所示。
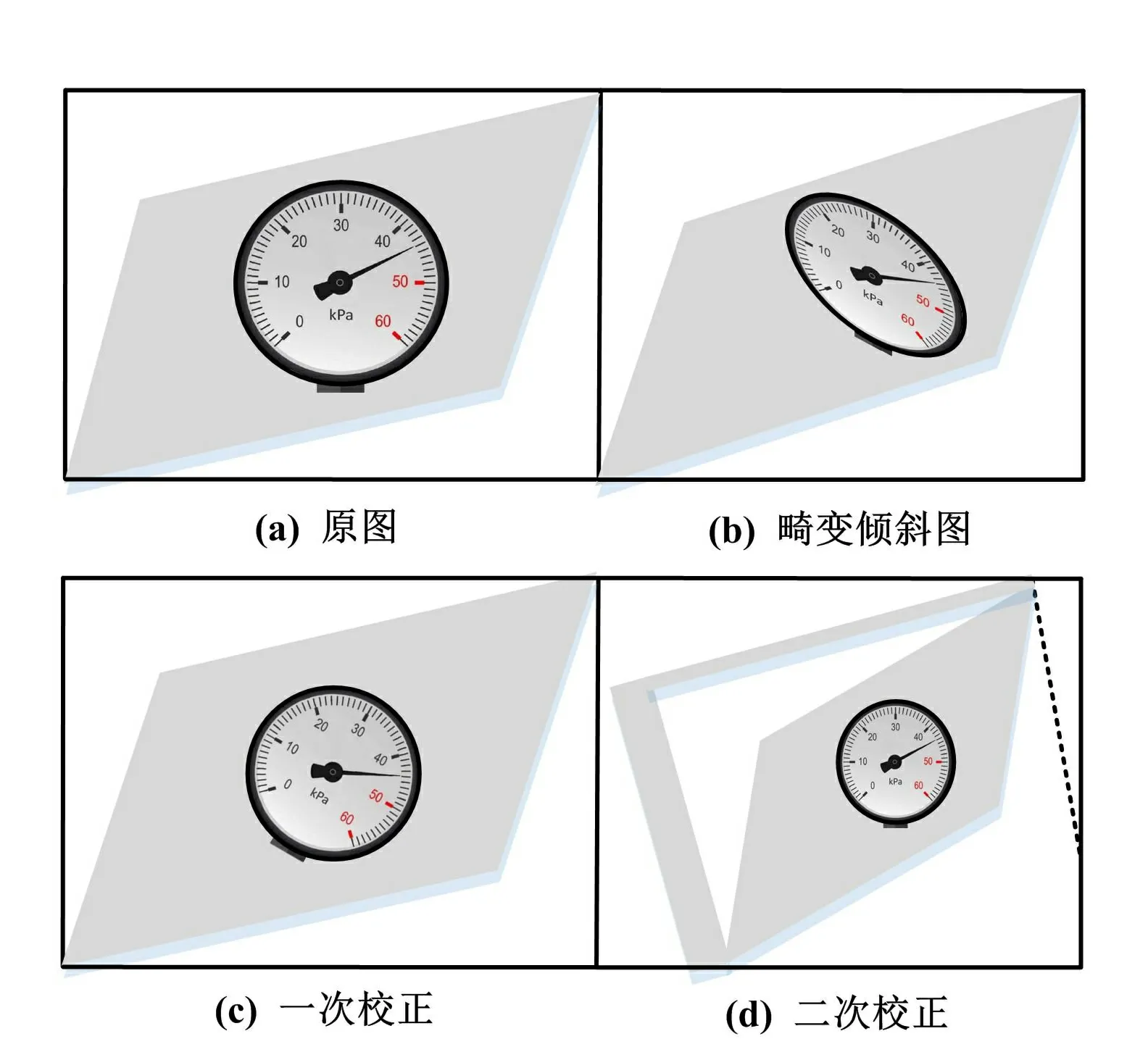
圖8 傾斜校正效果圖Fig.8 Tilt correction effect
根據(jù)式(14)實(shí)現(xiàn)第一步校正。 效果如圖8(c)所示。 接著采用霍夫變換和透視變換理論對一次傾斜校正圖像進(jìn)行第二次校正,實(shí)現(xiàn)了本文所設(shè)定的研究效果,如圖8(d)所示。 因此,本次研究的傾斜校正圖像識別結(jié)果如圖9 所示。
圖9 傾斜校正圖像識別結(jié)果圖Fig.9 Image recognition results of tilt correction
由圖8 可知,雖然傾斜校正處理后的圖像依舊存在些許模糊,但校正處理后的圖像特征與校正前相比清晰度、精確度均更高,不影響后續(xù)自動(dòng)識別。由此可見,基于Freeman 鏈碼改進(jìn)圖像處理算法能有效地分析指針式儀表圖像傾斜問題并對其進(jìn)行校正,避免了單一的圖像水平傾斜所造成的指針式儀表識別缺陷。
3.2 校正圖像識別驗(yàn)證的差異比較
通過上述圖像校正處理后,再次對校正后的圖像進(jìn)行示數(shù)識別處理。 本文研究的重點(diǎn)是基于Freeman 鏈碼改進(jìn)圖像處理算法的線性指針式儀表識別。
相較于霍夫變換算法,本文提出的基于Freeman鏈碼改進(jìn)圖像處理算法在指針式儀表的應(yīng)用中的性能更好。 在圖9 的基礎(chǔ)上,分別比較了人工識別與基于Freeman 鏈碼改進(jìn)圖像處理算法識別基礎(chǔ)上的指針式儀表的周長占比情況,如圖10 所示。
由圖10 可以看出:相較于人工識別而言,基于Freeman 鏈碼改進(jìn)圖像處理算法識別的指針式儀表的周長占比誤差相對更低,在可接受范圍內(nèi)波動(dòng)。
4 結(jié)論
綜上所述,圓形、優(yōu)弧或者劣弧是相對常見的指針式儀表的3 種刻度線,工業(yè)中常見的是圓形和方形。但從理論角度而言,上述幾種指針式儀表的刻度線在經(jīng)數(shù)字化處理之后,均可被視作以指針中心為圓心、以中心點(diǎn)到刻度線的距離為半徑的圓形。 本研究在前期研究的基礎(chǔ)上,綜合考慮了不同情況下指針式儀表圖像獲取中可能發(fā)生的各種問題,并提出了基于Freeman 鏈碼改進(jìn)圖像處理算法的識別方法,實(shí)現(xiàn)了對圖像傾斜問題的校正與識別,最終驗(yàn)證了指針式儀表示數(shù)識別的可靠性,以及Freeman 鏈碼改進(jìn)圖像處理算法的高效性和普適性。

- 自動(dòng)化儀表的其它文章
- 我國守時(shí)系統(tǒng)發(fā)展現(xiàn)狀與性能分析
- 基于改進(jìn)參數(shù)協(xié)進(jìn)化和聲搜索算法的配電網(wǎng)重構(gòu)
- 螢火蟲算法在三電平NPC 逆變器中的應(yīng)用
- 面向全自動(dòng)運(yùn)行系統(tǒng)的ATP 自動(dòng)過分相關(guān)鍵技術(shù)研究
- 車用尿素溶液自動(dòng)化生產(chǎn)設(shè)備的控制系統(tǒng)設(shè)計(jì)
- 面向工控安全的電動(dòng)執(zhí)行機(jī)構(gòu)在線服務(wù)系統(tǒng)設(shè)計(jì)