基于51單片機的智能分揀搬送系統設計
2021-09-09 07:09:12張林
江蘇通信 2021年4期
張 林
商洛學院電子信息與電氣工程學院
0 引言
人工智能、物聯網等先進技術正在以“工業4.0”之名,掀起對傳統工業的智能革命,隨著“中國制造2025”的到來,智能化電子控制在智能物流生產領域的應用也越來越廣泛,可實現搬運、分揀、裝配等工作流程。以往的搬運分揀系統比較機械化,生產效率較低,而智能分揀搬送系統是建立在電、光、聲等各類傳感器和微處理控制器等先進技術基礎上的。本系統以51單片機為最小控制器系統,實現了智能化搬運系統和智能識別系統的緊密結合,其高效、易操作、成本低,具有較強的實用性。
1 系統方案設計與選擇
1.1 系統總體設計
本系統主要設計了一個智能物體分揀搬送裝置,包括四大模塊:最小控制系統、智能搬運系統、智能識別系統和供電系統。系統設計框架如圖1所示。
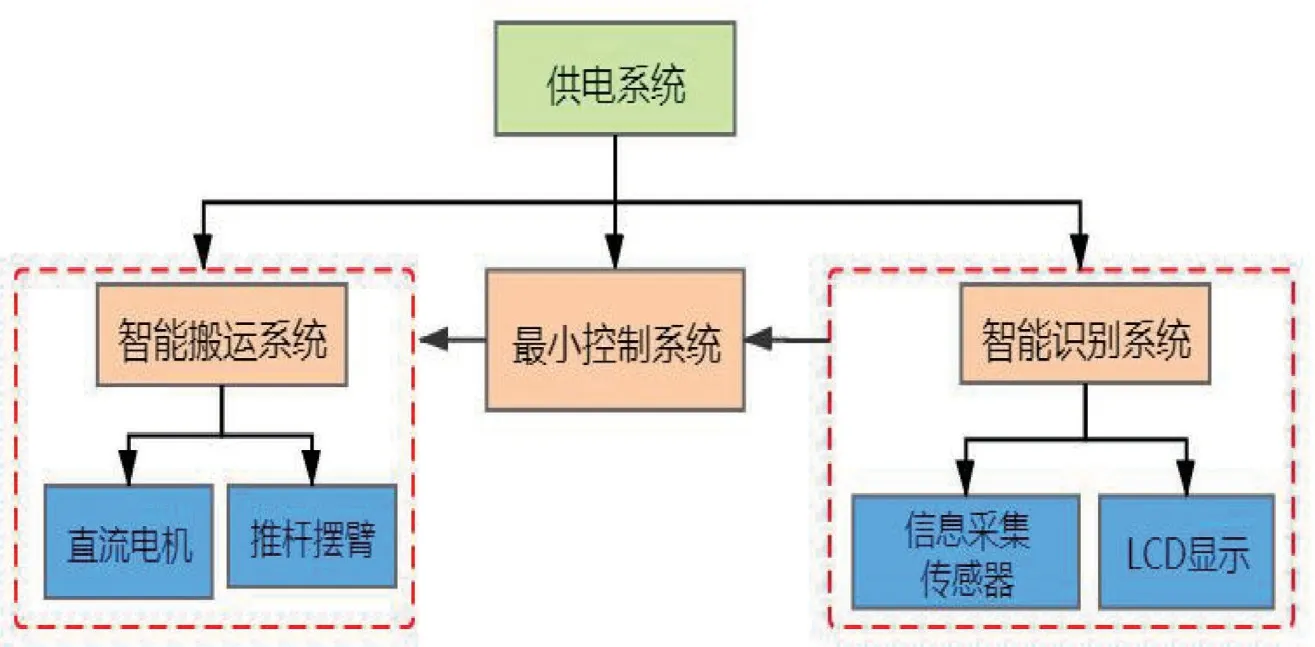
圖1 系統設計框架
最小控制系統采用STC51單片機為核心控制器。供電系統采用可調式的直流穩壓電源。智能識別系統包括信息采集模塊和信息顯示模塊,根據檢測需求選擇TCS320傳感器采集信息。當物體趨近目的區域時,傳感器首先對選定物體顏色進行濾波,得到相應的光強值,再分析光強值,并將其轉換成相應的頻率信號傳送給單片機,單片機通過循環檢測的方式檢測出RGB飽和度,從而確認物塊的顏色,達到分揀效果。
智能搬運系統采用4組直流減速電機驅動推桿擺臂作為智能搬運系統,整個系統采用橫/縱向驅動方式,運用電機驅動傳送帶的運行,從而帶動推桿擺臂。其中一組電機實現橫向驅動,將分散的木塊橫向推到一定區域,實現集中操作;另一組電機實現縱向驅動,推動規定物體到達規定區域,完成物品的分揀搬送。
1.2 方案選擇論證
(1)最小控制系統方案選擇。采用STC89C51單片機,具有功耗低、指令周期短、運算速度快等優勢;具有調速處理功能,易于編程與調試;具有較多的I/O口,具有一套完整的按位操作系統,被廣泛用于各種控制電路。該單片機運用廣泛,開發簡單,較為成熟,成本較低。
(2)分揀搬送方案選擇。采用機械手對物品進行逐個分揀后搬送,雖精準度高,但考慮到所要搬運的物品太過分散,機械手先是分揀后再搬送,浪費時間。采用交叉帶式的小車分揀系統,可設置格口數多、布局靈活,但對物體體積的局限較大。考慮到時間與效率,最終采用推桿擺臂對物品統一集中操作,再根據采集信息進行分揀操作,最終提高工作效率。
(3)信息采集模塊的選擇。根據檢測需求選取相應的傳感器采集信息,本系統檢測的物體可按顏色識別,在選取方案時,采用STM32f407攝像頭進行顏色識別,其識別率高,但成本也較高,不便安裝;采用紅外對管實現顏色識別,只能識別深色;利用顏色傳感器TCS320芯片實現顏色識別,具有高分辨率、可編程調整、溫度系數穩定、可直接與微處理器通信等優點。
2 系統設計與實現
2.1 硬件電路設計
本供電系統需要設計一個輸出為5~12 V的可調式直流穩壓電源,作為整個系統的電源供給。原理是將220 V交流電通過變壓器、整流電路、濾波電路轉化為波形較為平滑的直流電,再利用7812、7912、7805三端集成穩壓器穩壓至+5~+12 V。以51最小系統為核心,控制顏色識別、電機驅動,通過對信號的處理來實現物體的感應。顏色識別傳感器通過光源傳出信號,識別到顏色后發出指令,如圖2所示。
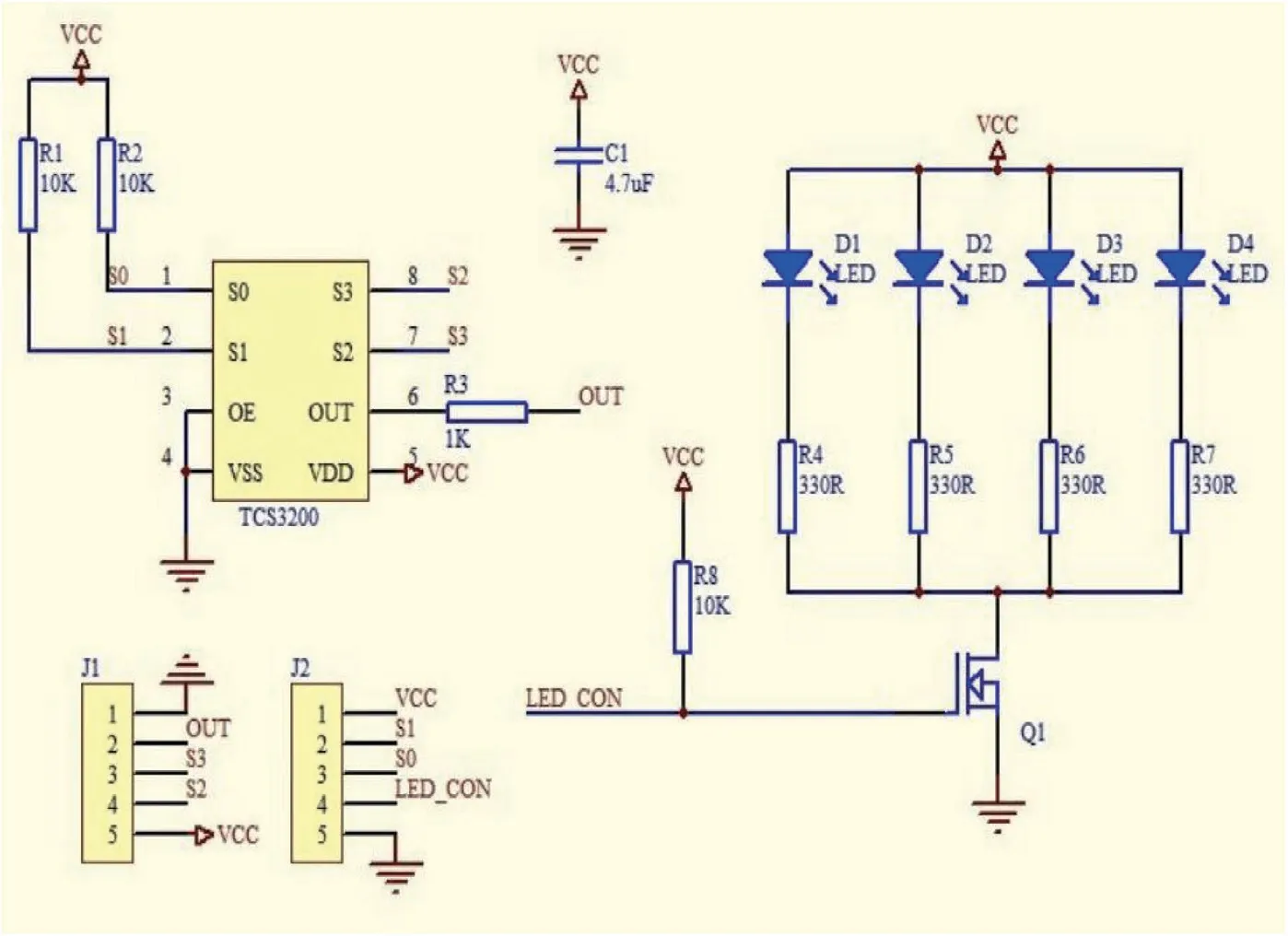
圖2 傳感器原理
2.2 軟件程序設計
根據系統需求,需要完成的總體軟件設計包括6個部分:單片機系統初始化、姿態信息采集、卡爾曼濾波、速度檢測、直流電機PID控制算法、RGB飽和度檢測。軟件設計整體流程如圖3所示。
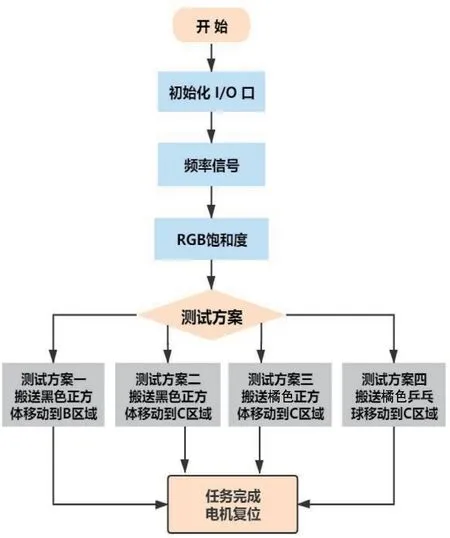
圖3 軟件設計流程
3 測試方案與測試結果
3.1 測試條件
(1)測試場地:一個以木條(截面不大于3 cm×4 cm,木制本色)圍成的100 cm×150 cm的A區域內,顏色為白色,B區域為黑色,C區域為紅色。(2)測試儀器:水平尺、直尺、秒表。(3)誤差分析:燈光強弱的影響、場地的摩擦力影響。
3.2 測試方法
本系統通過按鍵來選擇工作模式,智能識別模塊將物品的顏色信息發送至主控單片機,經過分析運算過后,驅動電機運動并完成相應的搬送任務。觀察物品搬送的位置與時間,分析實踐結果。
3.3 測試數據
(1)從A區域搬送12只黑色正方體(位置隨機)到B區域,如圖4所示,搬送情況以及所用時間情況如表1所示。
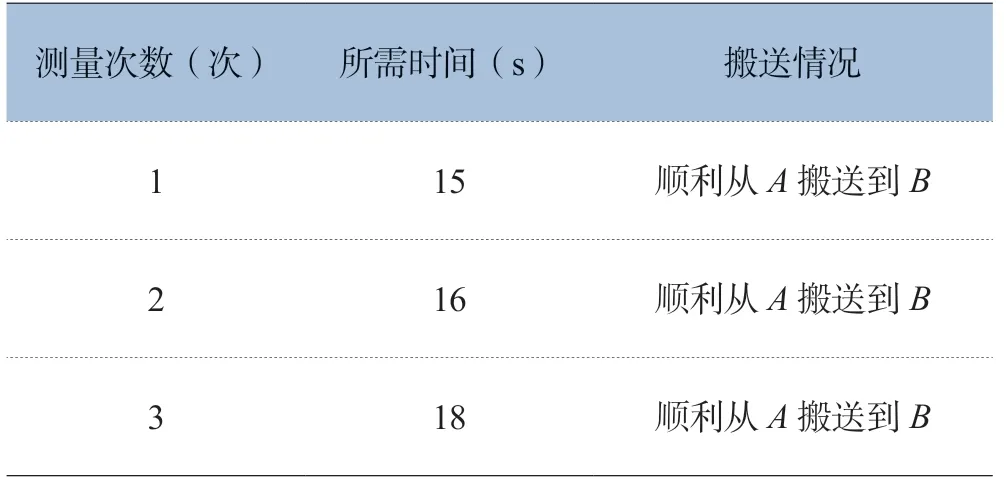
表1 搬送黑色正方體所花的時間與搬送情況
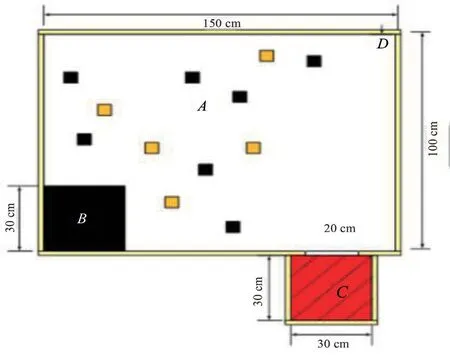
圖4 從A區域搬送12只黑色正方體
(2)從A區域搬送12只黑色正方體(位置隨機)到C區域的搬送情況以及所用時間情況如表2所示。

表2 搬送黑色正方體所花的時間與搬送情況
(3)從A區域12只橘黃色與黑色正方體(位置隨機)中搬送橘黃色正方體(位置隨機)到達C區域所花的時間以及搬送情況如表3所示。

表3 搬送橘黃色正方體所花的時間及搬送情況
(4)從A區域12只橘黃色與黑色乒乓球(位置隨機)中搬送橘黃色乒乓球(位置隨機)到達C區域所花的時間以及搬送情況如表4所示。
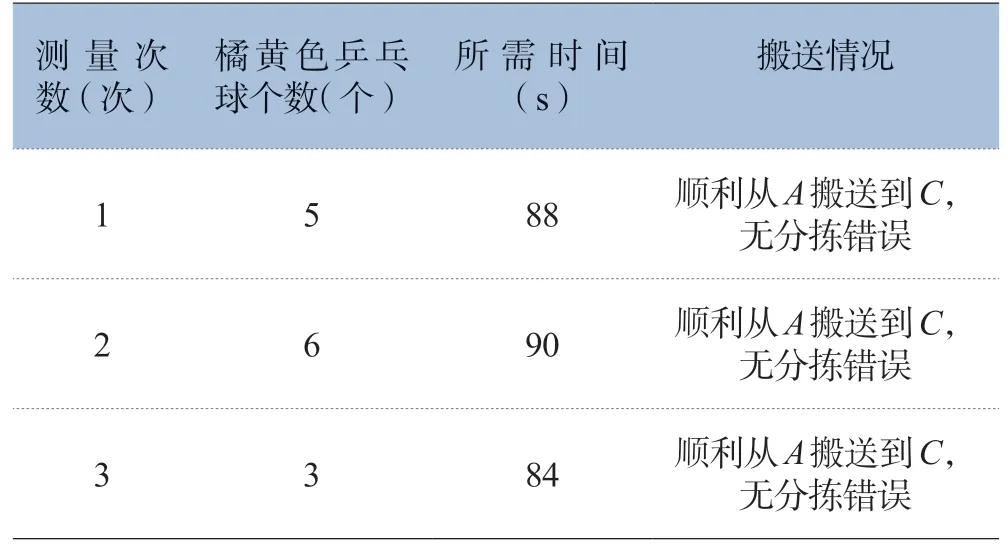
表4 搬送橘黃色乒乓球所花的時間及搬送情況
3.4 測試數據結果
本系統可以在規定區域內利用較短時間完成物品的識別、分揀和搬運。實踐驗證了智能分揀搬送系統的效率性、精準性、實用性等優點,應用到現代電子物流領域,可大大節省人力資源,并實時監控分揀區情況,后續完善現代化信息系統,實現大數據管理。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52