
工業機器人的運動學分析與仿真
2021-09-10 06:46:58高媛王超馬鵬飛
機電工程技術 2021年3期
高媛 王超 馬鵬飛
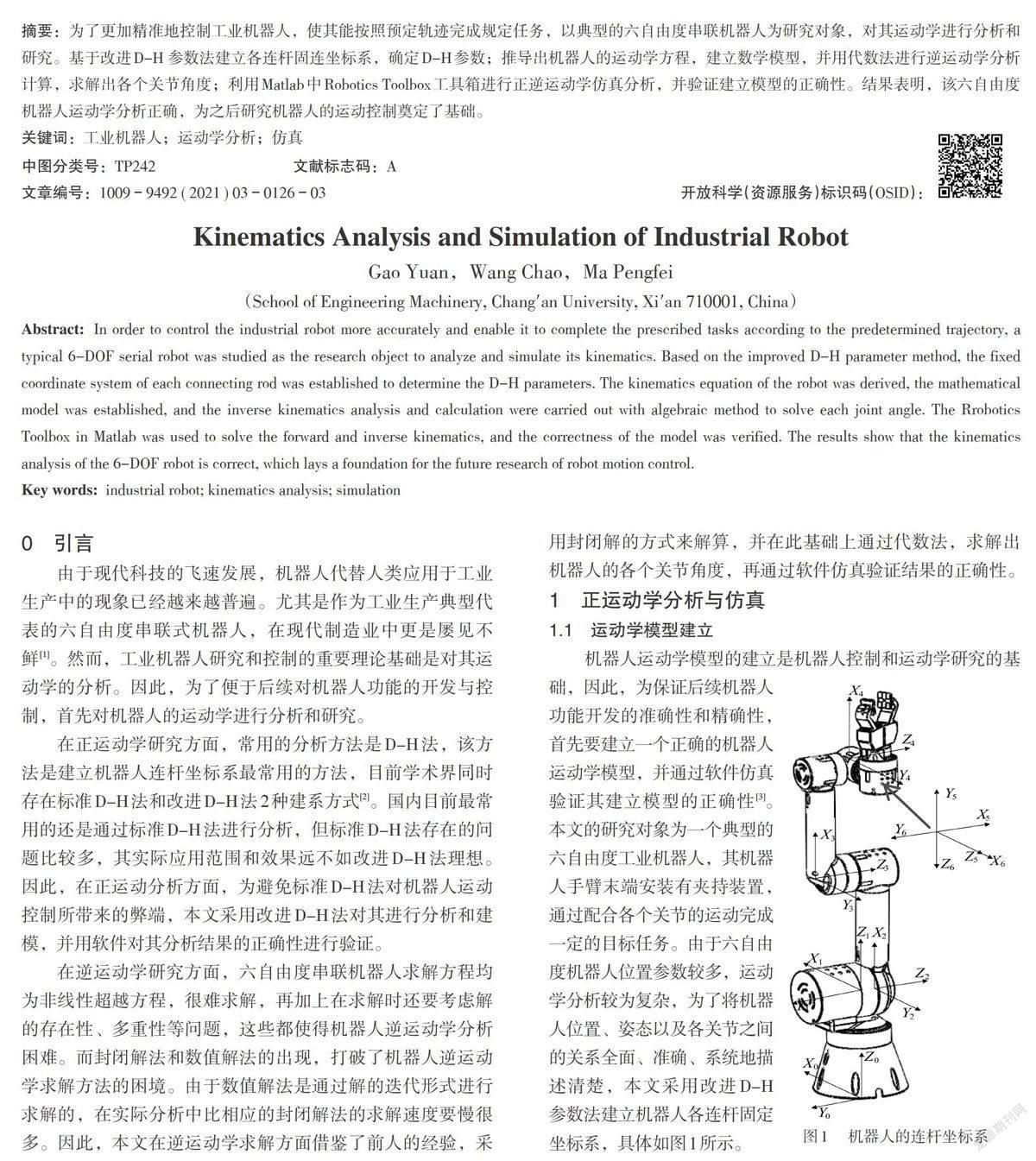


摘要:為了更加精準地控制工業機器人,使其能按照預定軌跡完成規定任務,以典型的六自由度串聯機器人為研究對象,對其運動學進行分析和研究。基于改進D-H參數法建立各連桿固連坐標系,確定D-H參數;推導出機器人的運動學方程,建立數學模型,并用代數法進行逆運動學分析計算,求解出各個關節角度;利用Matlab中Robotics Toolbox工具箱進行正逆運動學仿真分析,并驗證建立模型的正確性。結果表明,該六自由度機器人運動學分析正確,為之后研究機器人的運動控制奠定了基礎。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年18期)2018-11-14 01:48:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
