太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點的防盜防破壞設(shè)計及展望
2021-09-10 22:59:06黃凱舒磊李凱亮楊星朱艷汪小旵蘇勤
智慧農(nóng)業(yè)(中英文) 2021年1期
黃凱 舒磊 李凱亮 楊星 朱艷 汪小旵 蘇勤


摘要: 太陽能殺蟲燈在有效控制蟲害的同時,可減少農(nóng)藥施藥量。隨著其部署數(shù)量的增加,被盜被破壞的報道也越來越多,嚴重影響了蟲害防治效果并造成了較大的經(jīng)濟損失。為有效地解決太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點被盜被破壞問題,本研究以太陽能殺蟲燈物聯(lián)網(wǎng)為應(yīng)用場景,對太陽能殺蟲燈硬件進行改造設(shè)計以獲取更多的傳感信息;提出了太陽能殺蟲燈輔助設(shè)備——無人機殺蟲燈,用以被盜被破壞出現(xiàn)后的部署、追蹤和巡檢等應(yīng)急應(yīng)用。通過上述硬件層面的改造設(shè)計和增加輔助設(shè)備,可以獲取更為全面的信息以判斷太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點被盜被破壞情況。但考慮到被盜被破壞發(fā)生時間短,僅改造硬件層面還不足以實現(xiàn)快速準確判斷。因此,本研究進一步從內(nèi)部硬件、軟件算法和外形結(jié)構(gòu)設(shè)計三個層面,探討了設(shè)備防盜防破壞的優(yōu)化設(shè)計、設(shè)備防盜防破壞判斷規(guī)則的建立、設(shè)備被盜被破壞的快速準確判斷、設(shè)備被盜被破壞的應(yīng)急措施、設(shè)備被盜被破壞的預(yù)測與防控,以及優(yōu)化計算以降低網(wǎng)絡(luò)數(shù)據(jù)傳輸負荷六個關(guān)鍵研究問題,并對設(shè)備防盜防破壞技術(shù)在太陽能殺蟲燈物聯(lián)網(wǎng)場景中的應(yīng)用進行了展望。
關(guān)鍵詞: 太陽能殺蟲燈;防盜防破壞;無人機殺蟲燈;農(nóng)業(yè)物聯(lián)網(wǎng);節(jié)點
中圖分類號: S237;S251;U492.8+3??? ? 文獻標志碼: A??? 文章編號: 202102-SA034
引用格式:黃凱, 舒磊, 李凱亮, 楊星, 朱艷, 汪小旵, 蘇勤. 太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點的防盜防破壞設(shè)計及展望[J]. 智慧農(nóng)業(yè)(中英文), 2021, 3 (1): 129-143.
Citation:HUANG Kai, SHU Lei, LI Kailiang, YANG Xing, ZHU Yan, WANG Xiaochan, SU Qin. Design and prospect for anti-theft and anti-destruction of nodes in Solar Insecticidal Lamps Internet of Things[J]. Smart Agriculture, 2021, 3 (1): 129-143. (
1? 太陽能殺蟲燈被盜被破壞現(xiàn)狀
目前,太陽能殺蟲燈在農(nóng)業(yè)中得到了廣泛應(yīng)用[1],有效減少了大田期成蟲落卵量及后期化肥農(nóng)藥施用量,并能進行蟲情監(jiān)測,確保糧食安全。但是,越來越多的研究和報道表明,太陽能殺蟲燈被盜被破壞非常嚴重(如圖1所示)。
整理涉及到殺蟲燈盜竊破壞的文獻、報道如表1所示。分析太陽能殺蟲燈各零部件被盜被破壞的情況主要原因如下。
(1)太陽能殺蟲燈價值較高。目前網(wǎng)上檢索到的255個太陽能殺蟲燈產(chǎn)品,均價為2039.5元人民幣(220.0~20,000.0元)[23]。
(2)監(jiān)視設(shè)備投入高。太陽能殺蟲燈往往部署在人流量較少的地方,通過增加攝像頭等監(jiān)視設(shè)備來保障設(shè)備安全會大幅增加硬件投入,提升成本,不利于設(shè)備推廣應(yīng)用,同時監(jiān)測設(shè)備本身也存在被盜被破壞的風(fēng)險[24]。
(3)監(jiān)視設(shè)備通訊功能不完善。已有的太陽能殺蟲燈防盜功能大都是通過GPRS模塊實現(xiàn)的[1],但這只適用于圖1(a)所示的整燈被盜,且被盜燈具功能完好[2]的情況,不適用零部件的盜竊及破壞等情況,且其產(chǎn)生的數(shù)據(jù)流量費用使得應(yīng)用成本持續(xù)增加。
(4)太陽能殺蟲燈管理不完善。當太陽能殺蟲燈節(jié)點被盜被破壞后,缺乏應(yīng)急措施去管理維護殺蟲燈,短時間內(nèi)無法恢復(fù),這容易引起更多的被盜被破壞問題。
綜上,太陽能殺蟲燈在應(yīng)用過程中,缺乏合適的防盜防破壞方法,造成了較大的經(jīng)濟損失,也使得出現(xiàn)被盜被破壞問題后蟲害防治效果大打折扣。
參考李凱亮等[1]總結(jié)的聯(lián)網(wǎng)型殺蟲燈產(chǎn)品,對于具備防盜功能的產(chǎn)品[25-29],當出現(xiàn)殺蟲燈被盜被破壞時,有如下情況。
(1)整燈被盜。在整燈完整、功能正常的條件下,可通過定位判斷是否被盜。若整燈被盜且功能正常,則被盜后可追回。
(2)零部件被盜。零部件被盜的情況下,系統(tǒng)僅顯示相應(yīng)模塊故障,不能判別被盜情況。若蓄電池被盜,且無備用電源,則被盜時無法得知具體狀況。
(3)整燈被破壞。所有零部件(包括蓄電池)被破壞,若無備用電源,則整燈被破壞時,無法得知具體狀況。
(4)零部件被破壞。零部件被破壞的情況下,系統(tǒng)僅顯示相應(yīng)模塊故障,不能判別被破壞情況。若蓄電池被破壞,且無備用電源,則被破壞時無法得知具體狀況。
其中,太陽能殺蟲燈被盜、被破壞和產(chǎn)生故障在系統(tǒng)中都只顯示“故障”狀態(tài),這顯然不利于管理維護人員判斷殺蟲燈的真實工作狀態(tài)。
如果可準確識別殺蟲燈被盜被破壞的狀況,管理維護人員則可以快速行動,降低可能產(chǎn)生的損失。而且,目前的產(chǎn)品防盜功能的實現(xiàn)有一個前提:燈具完整且功能正常。這意味著太陽能殺蟲燈的防盜功能還有待提升。
此外,作者對物聯(lián)網(wǎng)設(shè)備安全研究的現(xiàn)狀進行了梳理,如表2所示。太陽能殺蟲燈物聯(lián)網(wǎng)和表2前三類場景特點都有共同之處,但是也存在不同;設(shè)備安全問題的應(yīng)對對策也有不足之處,可結(jié)合前三類場景的應(yīng)對對策完善現(xiàn)有太陽能殺蟲燈的被盜被破壞的應(yīng)對對策。
因此,可以對目前太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點加以改造設(shè)計,最終實現(xiàn)太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點更為完善的防盜防破壞功能。
本研究分析了太陽能殺蟲燈設(shè)備在應(yīng)用過程中被盜被破壞的情況,通過對太陽能殺蟲燈內(nèi)部硬件加以改造設(shè)計,并從太陽能殺蟲燈外部考慮,增加輔助設(shè)備以開展應(yīng)急措施。最后,結(jié)合硬件層面上的防盜防破壞設(shè)計,在軟件層面上分析開展防盜防破壞研究過程中需要考慮的關(guān)鍵研究問題,并對未來太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點的防盜防破壞研究進行了展望。
本研究基于團隊提出的太陽能殺蟲燈物聯(lián)網(wǎng)[1],從兩方面考慮太陽能殺蟲燈的防盜防破壞的改造設(shè)計。
(1)從太陽能殺蟲燈內(nèi)部考慮。綜合考慮成本、耗電量等因素,增加防盜防破壞的傳感器,為具體零部件的被盜被破壞的評估提供數(shù)據(jù)支持,并在盜竊破壞狀態(tài)出現(xiàn)后,警鳴器現(xiàn)場報警,盡可能降低損失。
(2)從太陽能殺蟲燈外部考慮。設(shè)計一款機動性強的輔助設(shè)備——無人機殺蟲燈,以便開展應(yīng)急措施,保障物聯(lián)網(wǎng)正常組網(wǎng)通信等基本功能,甚至為被盜被破壞案件的告破提供有效線索。
2? 物聯(lián)網(wǎng)節(jié)點防盜防破壞改造設(shè)計
2.1改造設(shè)計需求
對于太陽能殺蟲燈而言,任何時候都存在被盜被破壞的風(fēng)險,需要滿足不同時段對于被盜被破壞狀況的監(jiān)測需求來設(shè)計。
太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點的主要零部件包括:太陽能電池板、蓄電池、殺蟲燈、通信模塊(通信天線和無線設(shè)備)、控制電路、傳感器模塊以及安裝支架等。如圖2所示,增加太陽能電池板電壓、電流傳感器,監(jiān)測太陽能電池板的電壓、電流;蓄電池柜配鎖,增加門控開關(guān)傳感器,監(jiān)測蓄電池柜是否異常開啟;在支架內(nèi)部布線以防電線從外部破壞;支架內(nèi)置防盜防破壞系統(tǒng)硬件(通信用的備用供電模塊、加速度傳感器),通過金屬支架保護硬件。考慮到不同零部件在不同時段的工作狀態(tài)不同,防盜防破壞設(shè)計需要考慮各零部件的特點。
(1)太陽能電池板。只有在有光照的條件下,太陽能板才有電流輸出,所以在白天可以通過電流來判斷太陽能電池板是否正常。但在夜間,無法通過電流來判斷太陽能電池板是否正常。而在太陽能電池板被盜被破壞的時候,固定太陽能電池板的支架通常會發(fā)生劇烈的晃動、倒地或者出現(xiàn)位置移動,因此可增加加速度傳感器對破壞和盜取太陽能電池板的行為進行監(jiān)測和判斷。
(2)蓄電池。蓄電池白天通過太陽能電池板充電,同時給通信模塊供電;夜間給太陽能殺蟲燈供電,也給通信模塊供電。不論白天、黑夜,這個過程都存在電流的變化。但是,如果該設(shè)備被盜被破壞,整個節(jié)點將無法正常工作,因此需要有應(yīng)急備用電源以保障太陽能殺蟲燈的通信功能。此外,目前的蓄電池通常放在上鎖的蓄電池柜中,因此還需要有監(jiān)測蓄電池柜打開的門控開關(guān)監(jiān)測模塊。
(3)太陽能殺蟲燈。殺蟲燈通過蓄電池供能,夜間開燈誘蟲放電殺蟲,這個過程存在電流的變化。但是白天不工作,無法通過電流來判斷太陽能殺蟲燈是否正常。而在太陽能殺蟲燈被盜被破壞的時候,與太陽能殺蟲燈相連接的支架通常會發(fā)生劇烈晃動、倒地或者出現(xiàn)位置移動,因此可增加加速度傳感器對破壞和盜取太陽能殺蟲燈的行為進行監(jiān)測和判斷。
目前通過GPRS模塊進行太陽能殺蟲燈防盜,只適用于整燈被盜,無法實現(xiàn)全天候地對所有零部件被盜被破壞狀況進行監(jiān)測。因此,在對太陽能殺蟲燈進行改造設(shè)計過程中,需要增加上述提及的不同類型的傳感器,以完善信息的采集,從而為準確判斷被盜被破壞狀況提供數(shù)據(jù)支持。
2.2改造方案可行性分析
為獲取更豐富的信息,除了增加不同類型的傳感器之外,也可增加視頻采集設(shè)備。表3對GPRS模塊、視頻采集模塊,以及不同類型的傳感器,從多個角度進行了對比,探索更適合太陽能殺蟲燈物聯(lián)網(wǎng)的應(yīng)用場景。
其中,成本包括了單次投入和后續(xù)持續(xù)產(chǎn)生費用。GPRS模塊和視頻采集模塊購買成本較其他傳感器貴,且后續(xù)還存在持續(xù)增加的數(shù)據(jù)流量費用,這將大幅提高應(yīng)用成本;同時這兩個模塊持續(xù)工作能耗很大,增加了蓄電池能量輸出的負擔(dān)。除了視頻采集模塊需要添加額外的支架以保證太陽能殺蟲燈處在被監(jiān)測范圍內(nèi),其他模塊和傳感器都可以集成在電路板上,這也意味著視頻采集模塊相比于其他集成的傳感器暴露在外,容易被盜被破壞。
綜上所述,采用GPRS模塊和視頻采集模塊會遇到成本持續(xù)增加的情況,視頻采集模塊也容易被盜被破壞。而選擇集成其他傳感器模塊(電壓、電流傳感器、加速度傳感器和門控開關(guān)傳感器),總體價格更低,且不會增加額外費用,安全性也有保障,具有可行性。因此,本研究中選擇電壓、電流傳感器、加速度傳感器和門控開關(guān)傳感器。
2.3防盜防破壞系統(tǒng)總體設(shè)計
對太陽能殺蟲燈硬件進行改造設(shè)計,完善防盜防破壞系統(tǒng),如圖3和圖4所示。
其中,防盜防破壞系統(tǒng)通過型號為ARMEGA328P的Arduino模塊,接收來自電壓電流模塊、加速度傳感器模塊、門控開關(guān)模塊、電源模塊、備用電源模塊的信號,并與樹莓派Zero和CC2538通信模塊交互,具體如下。
(1)四個電壓電流模塊用于監(jiān)測蓄電池、太陽能電池板、殺蟲燈燈管和殺蟲燈金屬網(wǎng)的電壓電流情況,并以數(shù)字信號的方式傳回Arduino模塊。
(2)電源模塊接入后,其能量可用于太陽能殺蟲燈所有耗電模塊的工作需求;備用電源模塊在電源模塊被切斷后,給Arduino模塊、通信模塊應(yīng)急供電。
(3)加速度傳感器模塊接入后,采集的信息以數(shù)字信號的方式傳回Arduino模塊。
(4)門控開關(guān)監(jiān)測模塊接入后,則以0/1信號的方式傳回Arduino模塊。
(5)CC2538通信模塊接收來自Arduino模塊的信號,并發(fā)出相應(yīng)的指令以實現(xiàn)對Arduino模塊的控制。
(6)樹莓派Zero接收來自Arduino模塊的數(shù)據(jù)信息,并發(fā)出相應(yīng)的指令以實現(xiàn)對Arduino模塊的控制。
2.4功能可行性驗證
殺蟲燈防盜防破壞系統(tǒng)對相應(yīng)的傳感器功能的可行性進行驗證,驗證通過才能在太陽能殺蟲燈上進行安裝。通過一系列的測試,下面四種傳感器均可正常運行,滿足改造設(shè)計的需求。
(1)門控開關(guān)。門控開關(guān)開啟或關(guān)閉,系統(tǒng)能夠收到對應(yīng)的高低電平信號。
(2)電壓電流傳感器。對于太陽能殺蟲燈不同零部件,各自的電壓電流傳感器都可以輸出實時電壓電流變化,如“12.01 V,3.9 mA”。
(3)備用電源。切斷蓄電池供電時,無線通信模塊還可以正常工作,工作時長取決于電池容量,也不會因為切斷蓄電池供電出現(xiàn)通信模塊重啟的情況。
(4)加速度傳感器。當太陽能殺蟲燈晃動時,加速度傳感器能采集相應(yīng)信號并上傳系統(tǒng)。通過相應(yīng)的模塊獲得數(shù)據(jù)信息,為太陽能殺蟲燈狀態(tài)的判斷提供數(shù)據(jù)支撐。
3? 基于無人機的防盜防破壞輔助設(shè)備設(shè)計
在增加了上面?zhèn)鞲衅髦螅色@取更豐富的數(shù)據(jù)信息用于判斷太陽能殺蟲燈被盜被破壞的情況,但是面對“防盜防破壞”的需求仍存在不足。(1)在出現(xiàn)被盜被破壞情況后,不能提供更多的盜竊、破壞細節(jié)信息,破案難度較高,大概率不能追回被盜的太陽能殺蟲燈零部件或者整燈,不能降低用戶的損失;(2)在出現(xiàn)被盜被破壞情況后,沒有可以快速補充節(jié)點的措施,關(guān)鍵節(jié)點可能被盜被破壞而導(dǎo)致網(wǎng)絡(luò)通信癱瘓。同時,節(jié)點被破壞可能導(dǎo)致無法殺蟲。因此,需要增加輔助設(shè)備以彌補上述不足。
3.1目標需求
根據(jù)前文分析,對太陽能殺蟲燈進行改造設(shè)計后,防盜防破壞系統(tǒng)可以采集更豐富的信息,可以更為準確地判斷被盜被破壞狀況。在出現(xiàn)被盜被破壞之前,用戶希望能夠降低被盜被破壞風(fēng)險。在出現(xiàn)被盜被破壞情況后,用戶希望能夠追回被盜的零部件或者整燈,或者可以獲取與破案相關(guān)的有價值的線索。同時,由于重新安裝部署太陽能殺蟲燈費時費力費錢,所以還需要可快速響應(yīng)的輔助設(shè)備,進行應(yīng)急殺蟲。無人機作為機動性很強的設(shè)備,能夠有效滿足應(yīng)急需求。
目前,無人機在農(nóng)業(yè)中應(yīng)用廣泛,主要包括土壤監(jiān)測[55,56]、測繪[57,58]、人工授粉[58,59]、作物表型[60,61]、精準農(nóng)業(yè)[62-64]、灌溉[65,66],農(nóng)藥噴灑、病蟲害監(jiān)測防治[67-69],作物監(jiān)測,以及植物識別[70,71]。其中,關(guān)于無人機進行農(nóng)藥噴灑、病蟲害監(jiān)測防治的研究較多,在安全方面也有了一定的應(yīng)用。例如警用無人機[72]和電力行業(yè)的巡檢無人機[73]等。但截止目前,尚未有基于無人機開展農(nóng)業(yè)生產(chǎn)設(shè)備的防盜防破壞研究,以保障設(shè)備安全。
綜上,可以結(jié)合太陽能殺蟲燈物聯(lián)網(wǎng)場景的特點對無人機加以改造設(shè)計,以便在該場景中發(fā)揮更大的效果。因此,從殺蟲以及防盜防破壞的角度出發(fā),提出無人機殺蟲燈。
3.2無人機殺蟲燈原型設(shè)計及可行性驗證
3.2.1結(jié)構(gòu)組成
無人機殺蟲燈主要由無人機及其電源、殺蟲燈及其電源組成。無人機殺蟲燈如圖5所示。
(1)無人機。本研究使用定制無人機(品牌:datonhooya)[74],具有5.0 kg的載重能力,裝備了全球定位系統(tǒng)(Global Positioning System,GPS)、圖傳系統(tǒng),可在2.4 GHz頻段下無線通信。無人機底部支架根據(jù)殺蟲燈尺寸加以定制,使得能夠安裝殺蟲燈。同時依據(jù)關(guān)于殺蟲燈殺蟲放電會對旁邊無線通信設(shè)備造成干擾的結(jié)果[75],支架保持了無人機和殺蟲燈的間距,避免無人機的通信模塊以及殺蟲燈的通信模塊受到殺蟲放電的干擾,引發(fā)設(shè)備通信問題。
(2)殺蟲燈。設(shè)計采用神捕太陽能殺蟲燈[76,77],重量為3.5 kg。考慮到無人機的載重能力,采用小型鋰電池給殺蟲燈供電,因此,無人機殺蟲燈中殺蟲燈工作時長也和太陽能殺蟲燈的工作時長不同。
(3)無人機和殺蟲燈的通信。二者有各自的通信系統(tǒng),彼此之間通過無線傳感器網(wǎng)絡(luò)通信。二者也有各自獨立的電源:無人機采用的是高密度的鋰電池(格氏ACE原廠鋰聚合物動力鋰電池16,000 mAh),而殺蟲燈采用的是普通的鋰電池(耐杰12 V鋰電池8400 mAh)。對于無人機殺蟲燈的兩套通信系統(tǒng),可以根據(jù)應(yīng)用需求,設(shè)置其與太陽能殺蟲燈物聯(lián)網(wǎng)的節(jié)點通信方式。
3.2.2載燈飛行測試及模擬殺蟲測試
為驗證無人機殺蟲燈原型的可行性,從載燈飛行以及開燈殺蟲時長兩方面進行可行性測試。
(1)載燈飛行可行性測試。
測試目的:測試無人機能否載燈飛行。由于飛行時長、飛行距離與電池容量相關(guān),而無人機殺蟲燈飛行范圍需要覆蓋多少太陽能殺蟲燈節(jié)點尚未確定,因此飛行時長暫不考慮。
測試方法:設(shè)計無人機支架,并將殺蟲燈固定在無人機支架上,控制無人機殺蟲燈飛行。
測試結(jié)果:如圖6所示,無人機可以滿足載燈飛行要求。但是支架底座的設(shè)計仍需要進一步優(yōu)化,以提升起降穩(wěn)定性。
(2)開燈殺蟲時長測試。目前所采用的神捕殺蟲燈產(chǎn)品,在電量供應(yīng)充足的條件下,每天夜間連續(xù)開燈殺蟲時間設(shè)置為5 h。首先需要測試配備的鋰電池是否能夠堅持5 h的持續(xù)放電,保障能夠支持一晚5 h的殺蟲時間,從而保證無人機殺蟲燈和太陽能殺蟲燈在夜間開燈時長上的一致。
測試目的:測試無人機殺蟲燈能否滿足節(jié)點部署在野外,一晚持續(xù)5 h的開燈殺蟲需求。
測試方法:為定量分析開燈殺蟲時長,這里沒有采用實地開燈放電殺蟲的方式進行實驗。而是依據(jù)模擬放電模塊[78],設(shè)置4次/s的放電頻率,模擬放電殺蟲;而每次殺蟲是否有效,以在模擬放電模塊旁邊能否監(jiān)測到電平跳變?yōu)闇省R驗樵诜烹姎⑾x過程中,高壓放電脈沖會引起一些元器件的電平跳變,可以認為真實的放電殺蟲與電平跳變存在關(guān)聯(lián);更進一步,如果模擬放電模塊工作過程中能夠監(jiān)測到電平跳變,可以認為模擬放電模塊可以在一定程度上表征真實的放電殺蟲過程。因此,通過模擬放電模塊模擬放電殺蟲具有一定的可行性,將模擬放電殺蟲過程進行量化,便于定量分析。
測試結(jié)果:連續(xù)開燈放電工作5 h,還能夠監(jiān)測電平跳變,說明該鋰電池可以滿足無人機殺蟲燈一晚上5 h的工作時長要求。
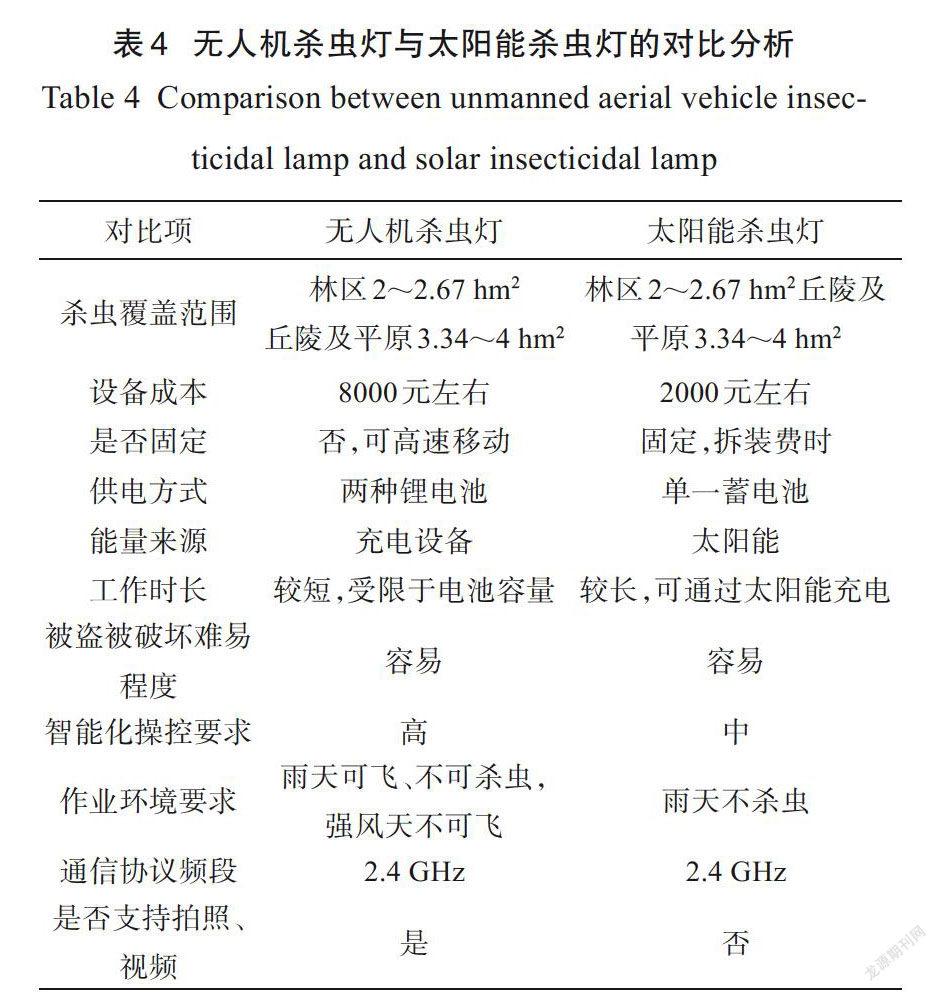
3.3無人機殺蟲燈與太陽能殺蟲燈的對比
由于無人機殺蟲燈是面向太陽能殺蟲燈物聯(lián)網(wǎng)的輔助設(shè)備,通過無人機殺蟲燈與太陽能殺蟲燈的對比分析(如表4所示),可以更加充分地了解無人機殺蟲燈的應(yīng)用特征,包括機動性強,可以短暫替代太陽能殺蟲燈殺蟲,并監(jiān)測蟲情信息,可以采集更豐富的圖像視頻信息。因此,無人機殺蟲燈在太陽能殺蟲燈物聯(lián)網(wǎng)中的應(yīng)用潛力巨大。
3.4無人機殺蟲燈的潛在應(yīng)用
無人機殺蟲燈作為太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點的輔助設(shè)備,還具有以下六方面應(yīng)用。
(1)綠色防治。無人機殺蟲燈作為一種新型農(nóng)業(yè)設(shè)備,和太陽能殺蟲燈一樣,屬于太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點,在田間部署的時候,可以開燈誘殺遷飛性害蟲,因此,部署無人機殺蟲燈也可以減少農(nóng)藥的施用。
(2)部署測試。通過無人機殺蟲燈的預(yù)部署,短時間內(nèi)在太陽能殺蟲燈物聯(lián)網(wǎng)中可以實現(xiàn)多種部署方案的實驗測試,并根據(jù)測試結(jié)果選擇最適合當?shù)氐牟渴鸱桨浮O啾扔诠潭ú渴鹛柲軞⑾x燈進行實測而言,可以極大地降低部署工作量,并提升最終通信以及殺蟲效果。
(3)應(yīng)急使用。如果遇到突發(fā)蟲害,超出太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點的處理能力,或者環(huán)境條件不利于無人機施藥或者其他方式施藥(例如,風(fēng)力條件不允許噴灑農(nóng)藥)。那么使用無人機殺蟲燈協(xié)同太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點在蟲害重點區(qū)域應(yīng)急殺蟲,可以減少農(nóng)藥的施用。如以下兩種應(yīng)用場景。
①如果遇到太陽能殺蟲燈整燈被盜,無人機殺蟲燈可以應(yīng)急部署,暫時替代被盜節(jié)點,保障太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點的殺蟲和通信功能,以便蟲情信息和設(shè)備被盜信息的傳輸。同時派遣其他無人機殺蟲燈對被盜太陽能殺蟲燈進行追蹤。
②如果遇到太陽能殺蟲燈零部件被盜,無論無人機殺蟲燈部署與否,無人機殺蟲燈需根據(jù)零部件實際情況做出選擇。例如,太陽能電池板在夜間被盜,則無需部署。
(4)誘蟲深入。在太陽能殺蟲燈物聯(lián)網(wǎng)中,如果某一節(jié)點附近蟲害密度較大,該節(jié)點的蟲害防治壓力較大,而其臨近節(jié)點附近的蟲害密度不大,則可以通過無人機殺蟲燈夜間開燈飛行而不殺蟲,逐步就近吸引害蟲到蟲害密度低的區(qū)域,由對應(yīng)區(qū)域內(nèi)部署的節(jié)點殺滅相應(yīng)的害蟲,從而減少整個區(qū)域的農(nóng)藥施藥量,并避免蟲害防治壓力較大區(qū)域節(jié)點能量的過度消耗。如果某地區(qū)尚未部署太陽能殺蟲燈,但是監(jiān)測到有大量遷飛性害蟲,也可以通過無人機殺蟲燈引誘的方式逐步吸引到部署了太陽能殺蟲燈的區(qū)域進行殺蟲,同時監(jiān)測蟲情信息。
(5)安全預(yù)警。如果太陽能殺蟲燈或者無人機殺蟲燈被盜被破壞,可通過無人機殺蟲燈、太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點以及二者的協(xié)同,做出智能化決策,進行預(yù)警、追蹤。也可以通過無人機殺蟲燈不定期的、有針對性的巡檢方式進行威懾,從而保障農(nóng)業(yè)生產(chǎn)產(chǎn)品、設(shè)備不被盜或者被盜可追溯。
(6)組網(wǎng)監(jiān)測。在蟲情監(jiān)測領(lǐng)域,雷達網(wǎng)的大尺度監(jiān)測和高空燈、地面燈、性誘捕器的小尺度監(jiān)測網(wǎng)的一體化運行,可以精準定位定量蟲害的成蟲遷移動態(tài),并通過網(wǎng)絡(luò)實時發(fā)布[79]。而無人機殺蟲燈具備移動性強、監(jiān)測防治于一體等特點,可以在監(jiān)測網(wǎng)中有效減少人力物力的投入、協(xié)同地面燈(例如,智能化的太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點、高空燈、蟲情測報燈等)采集蟲情信息,為生產(chǎn)、科研工作提供有力支撐。
4? 防盜防破壞的關(guān)鍵研究問題及展望
4.1關(guān)鍵研究問題
在太陽能殺蟲燈物聯(lián)網(wǎng)場景中,對節(jié)點進行改造設(shè)計以及增加輔助設(shè)備無人機殺蟲燈,為太陽能殺蟲燈及無人機殺蟲燈這些物聯(lián)網(wǎng)設(shè)備的防盜防破壞提供了重要的硬件支持。但單純地采集相關(guān)傳感器的信息并不足以快速準確地判斷被盜被破壞的情況。例如,傳感器顯示門控開關(guān)開啟,加速度傳感器響應(yīng),電壓電流傳感器正常。在這種情況下,僅僅從一個節(jié)點所采集的信息去考慮,不足以判斷出該節(jié)點被盜,這可能是一種故障,并沒有出現(xiàn)節(jié)點被盜被破壞的狀況。因此,還需要協(xié)同其周圍節(jié)點與該節(jié)點的通信狀態(tài),一起做出判斷,以降低誤報率。
因此,為更好地發(fā)揮設(shè)備的防盜防破壞功能,還需要從軟件、硬件和外形結(jié)構(gòu)設(shè)計層面考慮以下六個關(guān)鍵研究問題。
(1)優(yōu)化設(shè)備防盜防破壞設(shè)計。從控制節(jié)點成本考慮,現(xiàn)有太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點僅配備了簡易傳感器用于防盜防破壞設(shè)計(例如,門控開關(guān)、加速度傳感器和備用電源)。但就更好地保障太陽能殺蟲燈安全而言,在硬件設(shè)計上可進一步增加GPS傳感器(追蹤定位)、多重安全冗余設(shè)計,以及在更多關(guān)鍵位置安裝電壓電流傳感器監(jiān)測設(shè)備運行狀態(tài)。在外觀設(shè)計上可采用安全系數(shù)更高的電力柜、在太陽能電池板支撐梁上增加防盜固定孔[80]等方式來完善太陽能殺蟲燈的防盜結(jié)構(gòu)。
(2)建立設(shè)備防盜防破壞判斷規(guī)則。目前殺蟲燈產(chǎn)品被盜大多基于設(shè)備定位信息,當設(shè)備定位信息發(fā)生變化則發(fā)出防盜警示。而對于采用多傳感器,以多元信息融合為基礎(chǔ)的太陽能殺蟲燈防盜防破壞主題,目前尚未有相應(yīng)的解決方案與策略。不同于工業(yè)設(shè)備防盜防破壞,太陽能殺蟲燈具有部署范圍廣、部署密度低(2~4 hm2/盞)、實時維護難的特點。此外,太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點的工作機制也是需要考慮的一個方面。因此,針對以上特點及工作機制,選擇恰當?shù)膫鞲衅鳎⒒诙嘣葱畔⑷诤系谋I竊與破壞判斷規(guī)則庫是亟需解決的關(guān)鍵研究問題。此外,研究盜竊、破壞與不同故障之間的因果關(guān)系也十分重要。
(3)快速準確判斷設(shè)備是否被盜被破壞。依托現(xiàn)有太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點信息,設(shè)備被盜被破壞問題的快速準確判斷還存在較大難度。而基于目前的故障診斷技術(shù)[75],一些情況下,短時間內(nèi)只能分析得出若干可能情況,還不能得出一個準確結(jié)論。如果等待人工前去識別或者花費較長時間進一步監(jiān)測,可以準確判斷,但也可能會造成較大的損失(例如設(shè)備被盜無法追回,設(shè)備被損壞無法追溯嫌疑人員)。因此,對于涉及到設(shè)備被盜被破壞這類問題,要求能夠快速準確地做出判斷,這是首要考慮的重要研究工作。
(4)制定設(shè)備被盜被破壞應(yīng)急措施。如果關(guān)鍵節(jié)點被盜被破壞,備用電源不足以支持完整功能(殺蟲放電,蟲情采集),整個太陽能殺蟲燈物聯(lián)網(wǎng)將無法正常工作。一方面,節(jié)點無法開燈殺蟲,無法監(jiān)測蟲情,不利于后臺對于實際蟲情的實時把握。另一方面,備用電源不能監(jiān)測部分零部件是否處在正常工作狀態(tài),也就是說,這部分零部件被盜被破壞后是無法及時被監(jiān)測到的,這就導(dǎo)致設(shè)備面臨更大的被盜被破壞風(fēng)險。因此在判斷被盜被破壞之后,需要快速開展應(yīng)急措施。
應(yīng)急措施首先要考慮快速部署,而太陽能殺蟲燈的安裝部署工作量決定了快速補充正常節(jié)點組網(wǎng)存在較大的難度,因而需要采用無人機殺蟲燈進行應(yīng)急部署,但是無人機殺蟲燈的數(shù)量是有限的。因此,如何在更多太陽能殺蟲燈節(jié)點失效的場景中完成應(yīng)急部署,保障基本的蟲情測報、通信功能也是非常重要的研究工作。
(5)進行設(shè)備被盜被破壞的預(yù)測與防控。對于太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點而言,由于部署位置偏僻等原因,節(jié)點被盜被破壞風(fēng)險較高。根據(jù)太陽能殺蟲燈被盜被破壞的歷史數(shù)據(jù),對于一個節(jié)點具體被盜被破壞問題進行分析,基于節(jié)點零部件被盜被破壞情況、節(jié)點位置、節(jié)點被盜后移動方向、節(jié)點最終追溯地點等信息,建立預(yù)測模型,結(jié)合無人機殺蟲燈全天候、自動化、智能化的操作優(yōu)勢,進行傾向性巡檢,加強風(fēng)險等級較高節(jié)點的日常巡檢;以及出現(xiàn)被盜被破壞后能夠快速派遣追蹤無人機開展相關(guān)線索的采集工作,最終提升安全風(fēng)險顯示較高的設(shè)備的防控水平。因此,對于設(shè)備被盜被破壞的預(yù)測與防控,降低設(shè)備被盜被破壞風(fēng)險,也是極其重要的工作。
(6)優(yōu)化計算以降低網(wǎng)絡(luò)數(shù)據(jù)傳輸負荷。首先,在遠程防盜防破壞監(jiān)控過程中,盜竊破壞并非經(jīng)常出現(xiàn),日常監(jiān)控結(jié)果趨于一致,實時傳輸監(jiān)控結(jié)果會增加網(wǎng)絡(luò)傳輸負荷;其次,太陽能殺蟲燈部署地點較為特殊,容易受自然惡劣環(huán)境等因素影響而干擾加速度傳感器信息采集結(jié)果,引起誤判。針對這些問題,需開展相應(yīng)的測試試驗,一方面確定合適的通信頻次,另一方面提高盜竊破壞狀態(tài)判斷的精確度。
4.2展望
對太陽能殺蟲燈開展防盜防破壞設(shè)計,并增加輔助設(shè)備無人機殺蟲燈,在太陽能殺蟲燈物聯(lián)網(wǎng)的場景中,結(jié)合上述六個關(guān)鍵研究問題,可以有效降低設(shè)備被盜被破壞的風(fēng)險,保障節(jié)點功能的正常運轉(zhuǎn),降低經(jīng)濟損失,推動相關(guān)技術(shù)的推廣應(yīng)用。如圖7所示,在太陽能殺蟲燈物聯(lián)網(wǎng)場景中,可分別從網(wǎng)絡(luò)層面和節(jié)點層面來分析。
(1)從網(wǎng)絡(luò)層面來看,對于太陽能殺蟲燈和無人機殺蟲燈而言,經(jīng)過硬件設(shè)計改造之后,太陽能殺蟲燈被盜被破壞致使功能失效的情況下,物聯(lián)網(wǎng)技術(shù)的應(yīng)用可以實現(xiàn)節(jié)點被盜被破壞和故障的快速準確判斷;而無人機和殺蟲燈軟硬件的高度集成,能夠助力無人機殺蟲燈和太陽能殺蟲燈的協(xié)同工作,為組網(wǎng)節(jié)點提供一個“安全網(wǎng)”,最終為設(shè)備的正常運行提供安全保障。這不僅僅包括農(nóng)業(yè)信息安全[81],還包括農(nóng)業(yè)設(shè)備安全。
(2)從節(jié)點層面來看,通過網(wǎng)絡(luò)層面將任務(wù)信息落實到具體節(jié)點當中,無人機殺蟲燈可以作為后備節(jié)點應(yīng)急部署,開展放電殺蟲作業(yè)。同時,可以根據(jù)需要執(zhí)行巡檢、追蹤任務(wù)。隨著防盜防破壞技術(shù)的不斷升級完善,無人機殺蟲燈作為太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點,不論地面部署還是空中飛行,都受到與之相適應(yīng)的防盜防破壞技術(shù)的保護,從而降低所有節(jié)點的被盜被破壞風(fēng)險。
在未來農(nóng)業(yè)生產(chǎn)過程中,越來越多的物聯(lián)網(wǎng)技術(shù)得到運用,無人化、智能化的智慧農(nóng)業(yè)發(fā)展趨勢逐步顯現(xiàn)[82];同時,這個過程需要部署大量農(nóng)業(yè)生產(chǎn)設(shè)備,而本研究關(guān)于太陽能殺蟲燈物聯(lián)網(wǎng)節(jié)點的防盜防破壞技術(shù)也可以擴展應(yīng)用在相應(yīng)的農(nóng)業(yè)物聯(lián)網(wǎng)場景中,從軟件、硬件和外形結(jié)構(gòu)設(shè)計三方面共同保障農(nóng)業(yè)生產(chǎn)設(shè)備的安全。
參考文獻:
[1]??? 李凱亮, 舒磊, 黃凱, 等. 太陽能殺蟲燈物聯(lián)網(wǎng)研究現(xiàn)狀與展望[J]. 智慧農(nóng)業(yè)(中英文), 2019, 1(3): 13-28.LI K, SHU L, HUANG K, et al. Research and prospect of solar insecticidal lamps Internet of Things[J]. Smart Agriculture, 2019, 1(3): 13-28.
[2]??? 蔣高明. 物理誘蟲燈成功控制蟲害動了誰的奶酪[EB/OL]. (2017-05-30) [2021-03-10]. http://blog.sciencenet.cn/blog-475-1057890.html.
[3]??? 王賢玉, 翁曉梅. 頻振式殺蟲燈在園林害蟲防治上的應(yīng)用[J]. 植物保護, 2001(3): 47-48.WANG X, WENG X. Application of frequency vibration insecticidal lamps in garden pest control[J]. Plant Protection, 2001(3): 47-48.
[4]??? 劉子忠. 頻振式殺蟲燈防治油松毛蟲試驗[J]. 山西林業(yè), 2003(6): 32.LIU Z. Experiment on controlling pine caterpillar with frequency vibration insecticidal lamps[J]. Forestry of Shanxi, 2003(6): 32.
[5]??? 劉子忠. 頻振式殺蟲燈防治落葉松鞘蛾效果分析[J]. 山西林業(yè), 2004(2): 29.LIU Z. Analysis on the effect of frequency vibration insecticidal lamp on controlling larch sheath moth[J]. Forestry of Shanxi, 2004(2): 29.
[6]??? 杜建林, 吳江波, 王丹. 宜川縣蘋果害蟲發(fā)生現(xiàn)狀與防控技術(shù)[J]. 陜西農(nóng)業(yè)科學(xué), 2010, 56(2): 229-231.DU J, WU J, WANG D. Occurrence status and control techniques of apple pests in yichuan county[J]. Shaanxi Journal of Agricultural Sciences, 2010, 56(2): 229-231.
[7]??? 李國奎, 李維艷, 孟維平. 新型殺蟲燈誘殺玉米螟技術(shù)[J]. 中國園藝文摘, 2011, 27(4): 183-184.LI G, LI W, MENG W. Trapping and killing corn borer with new insecticidal lamps[J]. Chinese Horticulture Abstracts, 2011, 27(4): 183-184.
[8]??? 大眾網(wǎng). 殺蟲燈頻遭"黑手" 市政:盜走使用不當有害無益[EB/OL]. (2011-06-30) [2021-03-10] http://sd.dzwww.com/dongying/201106/t20110630_6442237.htm.
[9]??? 南國都市報. 三亞政府免費安裝千盞殺蟲燈 兩月后百盞遭破壞[EB/OL]. (2011-12-26) [2021-03-10]. http://www.hinews.cn/news/system/2011/12/26/013866708.shtml.
[10]? 齊蘊榮. 太陽能智能殺蟲燈應(yīng)用效果研究[J]. 現(xiàn)代農(nóng)業(yè)科技, 2012(2): 148.QI Y. Study on application effect of solar intelligent insecticidal lamps[J]. Modern Agricultural Science and Technology, 2012(2): 148.
[11]? 林文忠, 任厚彬, 劉巍巍. 太陽能殺蟲燈防治果園害蟲試驗[J]. 新農(nóng)業(yè), 2012(15): 25.LIN W, REN H, LIU W. Experiment on controlling orchard pests with solar insecticidal lamps[J]. New Agriculture, 2012(15): 25.
[12]? 林小軍. 廣州市植保新技術(shù)新方法推廣現(xiàn)狀分析[J]. 廣東農(nóng)業(yè)科學(xué), 2013, 40(14): 103-104, 108.LIN X. Analysis of insecticidal lamps promotion in guangzhou[J]. Guangdong Agricultural Sciences, 2013, 40(14): 103-104, 108.
[13]? 孔德生, 孫明海, 趙艷麗, 等. 積極爭取公共財政扶持 扎實推進病蟲害綠色防控[J]. 中國植保導(dǎo)刊, 2013, 33(3): 63-65.KONG D, SUN M, ZHAO Y, et al. Actively strive for public financial support and solidly promote green prevention and control of pests and diseases[J]. China Plant Protection, 2013, 33(3): 63-65.
[14]? 農(nóng)村大眾. 1.65萬盞殺蟲燈讓 30 萬畝花生告別灌藥歷史[EB/OL]. (2014-08-05) [2021-03-10]. http://paper.dzwww.com/ncdz/content/20140805/Articel05002MT.htm.
[15]? 孔德生, 孫明海, 朱曉明, 等. 鄒城市農(nóng)作物病蟲害專業(yè)化統(tǒng)防統(tǒng)治與綠色防控融合推進的實踐及成效[J]. 中國植保導(dǎo)刊, 2015, 35(4): 85-87.KONG D, SUN M, ZHU X, et al. Practice and effect of integration of specialized unified control of crop diseases and pests and green prevention and control in Zoucheng city[J]. China Plant Protection, 2015, 35(4): 85-87.
[16]? 王曉飛. 淺析從化學(xué)防治到物理防治的轉(zhuǎn)變——關(guān)于太陽能殺蟲燈的應(yīng)用[J]. 科技資訊, 2015, 13(33): 226-227.WANG X. Analysis on the transformation from chemical control to physical control—application of solar insecticidal lamps[J]. Science & Technology Information, 2015, 13(33): 226-227.
[17]? 云天海, 張磊. 太陽能殺蟲燈對蔬菜害蟲的誘殺效果[J]. 北方園藝, 2016(18): 118-121.YUN T, ZHANG L. Trapping effect of solar energy pest-killing lamp on vegetable pests[J]. Northern Horticulture, 2016(18): 118-121.
[18]? 閆碩, 孔德生, 趙艷麗, 等. 花生病蟲害全覆蓋式綠色防控工作的實踐與思考[J]. 中國植保導(dǎo)刊, 2018, 38(1): 73-77.YAN S, KONG D, ZHAO Y, et al. Practice and thinking of full coverage green prevention and control of peanut diseases and pests[J]. China Plant Protection, 2018, 38(1): 73-77.
[19]? 趙大媛, 范俊珺, 梁興格, 等. 文山州太陽能殺蟲燈使用現(xiàn)狀與問題及對策[J]. 農(nóng)業(yè)與技術(shù), 2018, 38(12): 7.ZHAO D, FAN J, LIANG X, et al. Application status, problems and strategies of solar insecticidal lamps in Wenshanzhou[J]. Agriculture and Technology, 2018, 38(12): 7.
[20]? 張玉芳, 于鳳艷. 太陽能誘蟲燈對玉米害蟲誘殺效果初探[J]. 農(nóng)業(yè)與技術(shù), 2018, 38(4): 36.ZHANG Y, YU F. Preliminary study on trapping and killing effect of solar insecticidal lamps on corn pests[J]. Agriculture and Technology, 2018, 38(4): 36.
[21]? 王迪軒. 農(nóng)業(yè)生產(chǎn)切莫浪費了殺蟲燈[J]. 農(nóng)藥市場信息, 2018(22): 56-57.WANG D. Insecticidal lamps must not be wasted in agricultural production[J]. Pesticide Market News, 2018(22): 56-57.
[22]? 姜寶海, 趙鐵倫, 賈生. 太陽能殺蟲燈在農(nóng)業(yè)生產(chǎn)中的推廣及應(yīng)用[J]. 農(nóng)業(yè)機械, 2020(10): 85-88.JIANG B, ZHAO T, JIA S. Promotion and application of solar insecticidal lamps in agricultural production[J]. Farm Machinery, 2020(10): 85-88.
[23]? 王蔻, 高俏, 李玲玲, 等. 我國農(nóng)用殺蟲燈生產(chǎn)現(xiàn)狀分析[J]. 華中昆蟲研究, 2020, 16(00): 116-125.WANG K, GAO Q, LI L, et al. Current development status of agricultural insect-pest light trap in China[J]. Insect Research in Central China, 2020, 16(00): 116-125.
[24]? 江蘇省公安廳. 有監(jiān)控不代表“萬事大吉”,監(jiān)控攝像頭也會被偷[EB/OL]. (2020-08-26) [2021-02-03]. http://www.bjyouth.com.cn/Bqb/20000412/GB/4216%5ED0412B1401.htm.
[25]? 河南云飛科技發(fā)展有限公司, 智慧物聯(lián)網(wǎng)殺蟲燈[EB/OL]. [2021-02-03]. http://www.tynpzs.com/cpzx/tynpzs/273.html.
[26]? 浙江隆皓農(nóng)林科技有限公司, 物聯(lián)網(wǎng)太陽能殺蟲燈[EB/OL].? [2021-02-03]. http://www.dwdds.com/product/283.html.
[27]? 上海飛欣環(huán)保科技有限公司, 物聯(lián)網(wǎng)太陽能殺蟲燈[EB/OL]. [2021-02-03]. http://www.xxscled.cn/product/20180228161404.html.
[28]? 河南賽蘭儀器設(shè)備制造有限公司, 智能物聯(lián)網(wǎng)太陽能殺蟲燈[EB/OL]. [2021-02-03]. http://www.slyqa.com/a/cp/fz/tynscd/473.html.
[29]? 常州金禾新能源科技有限公司, 物聯(lián)網(wǎng)殺蟲燈[EB/OL]. [2021-02-03]. http://www.jinhexny.com/news/27.html.
[30]? LENCWE M, CHOWDHURY S, OLWAL T. Detection of underground power cable theft: Strategies and methods[C]// 2018 IEEE PES/IAS PowerAfrica. Piscataway, New York, USA: IEEE, 2018: 1-9.
[31]? CHRISTOPHER A, SWAMINATHAN G, SUBRAMANIAN M, et al. Distribution line monitoring system for the detection of power theft using power line communication[C]// 2014 IEEE Conference on Energy Conversion (CENCON). Piscataway, New York, USA: IEEE, 2014: 55-60.
[32]? PATIL Y, SANKPAL S. EGSP: Enhanced grid sensor placement algorithm for energy theft detection in smart grids[C]// 2019 IEEE 5th International Conference for Convergence in Technology (I2CT). Piscataway, New York, USA: IEEE, 2019: 1-5.
[33]? GAO Y, FOGGO B, YU N. A physically inspired data-driven model for electricity theft detection with smart meter data[J]. IEEE Transactions on Industrial Informatics, 2019, 15(9): 5076-5088.
[34]? ZHENG Z, YANG Y, NIU X, et al. Wide and deep convolutional neural networks for electricity-theft detection to secure smart grids[J]. IEEE Transactions on Industrial Informatics, 2018, 14(4): 1606-1615.
[35]? ZHENG K, CHEN Q, WANG Y, et al. A novel combined data-driven approach for electricity theft detection[J]. IEEE Transactions on Industrial Informatics, 2019, 15(3): 1809-1819.
[36]? SALINAS S, LI P. Privacy-preserving energy theft detection in microgrids: A state estimation approach[J]. IEEE Transactions on Power Systems, 2016, 31(2): 883-894.
[37]? GAO Y, ZHOU C, SHANG D. A smart phone anti-theft solution based on locking card of mobile phone[C]// 2011 International Conference on Computational and Information Sciences. Piscataway, New York, USA: IEEE, 2011: 971-974.
[38]? CHANG S, LU T, SONG H. SmartDog: Real-time detection of smartphone theft[C]// 2016 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData). Piscataway, New York, USA: IEEE, 2016: 223-228.
[39]? HUSSAIN M, LU L, GAO S. An RFID based smartphone proximity absence alert system[J]. IEEE Transactions on Mobile Computing, 2017, 16(5): 1246-1257.
[40]? YANG L, GUO Y, DING X, et al. Unlocking smart phone through handwaving biometrics[J]. IEEE Transactions on Mobile Computing, 2015, 14(5): 1044-1055.
[41]? REN Y, CHEN Y, CHUAH M, et al. User verification leveraging gait recognition for smartphone enabled mobile healthcare systems[J]. IEEE Transactions on Mobile Computing, 2015, 14(9): 1961-1974.
[42]? AFMAN J, CIARLETTA L, FERON E, et al. Towards a new paradigm of UAV safety[EB/OL]. arXiv preprint arXiv:1803.09026, 2018.
[43]? HU J, LI J, LI G. Automobile anti-theft system based on GSM and GPS module[C]// 2012 Fifth International Conference on Intelligent Networks and Intelligent Systems. Piscataway, New York, USA: IEEE, 2012: 199-201.
[44]? SREEDEVI A, NAIR B. Image processing based real time vehicle theft detection and prevention system[C]// 2011 International Conference on Process Automation, Control and Computing. Piscataway, New York, USA: IEEE, 2011: 1-6.
[45]? MOHANASUNDARAM S, KRISHNAN V, MADHUBALA V. Vehicle theft tracking, detecting and locking system using open cv[C]// 2019 5th International Conference on Advanced Computing & Communication Systems (ICACCS). Piscataway, New York, USA: IEEE, 2019: 1075-1078.
[46]? KWAK B, HAN M, KIM H. Driver identification based on wavelet transform using driving patterns[J]. IEEE Transactions on Industrial Informatics, 2021, 17(4): 2400-2410.
[47]? ARTONO B, LESTARININGSIH T, YUDHA R, et al. Motorcycle security system using SMS warning and GPS tracking[J]. Journal of Robotics and Control (JRC), 2020, 1(5): 150-155.
[48]? ZALA D. Bike security with theft prevention[C]// 2018 3rd International Conference on Inventive Computation Technologies (ICICT). Piscataway, New York, USA: IEEE, 2018: 640-643.
[49]? LIU Z, WANG M, QI S, et al. Study on the anti-theft technology of museum cultural relics based on internet of things[J]. IEEE Access, 2019, 7: 111387-111395.
[50]? HAN Y, CHEN Z, GUO T. Design of equipment anti-theft tracker based on wireless sensor network[C]// 2017 First International Conference on Electronics Instrumentation & Information Systems (EIIS). Piscataway, New York, USA: IEEE, 2017: 1-5.
[51]? DING W, HU H. On the safety of iot device physical interaction control[C]// In Proceedings of the 2018 ACM SIGSAC Conference on Computer and Communications Security (CCS'18). New York, NY, USA: ACM, 2018: 832-846.
[52]? 金煒, 項新建. 基于Zigbee/GPRS的殺蟲燈監(jiān)控系統(tǒng)的設(shè)計[J]. 浙江科技學(xué)院學(xué)報, 2017, 29(6): 433-441.JIN W, XIANG X. Design of insecticidal lamp monitoring system based on zigbee and gprs technology[J]. Journal of Zhejiang University of Science and Technology, 2017, 29(6): 433-441.
[53]? 馬仟, 田茂, 唐文龍. 基于WSN的分布式太陽能殺蟲燈遠程控制系統(tǒng)研究與設(shè)計[J]. 物聯(lián)網(wǎng)技術(shù), 2017, 7(2): 77-79, 83.MA Q, TIAN M, TANG W. Research and design of distributed remote control system of solar insecticidal lamps based on WSN[J]. Internet of Things Technologies, 2017, 7(2): 77-79, 83.
[54] 朱城. 基于物聯(lián)網(wǎng)技術(shù)的植保殺蟲燈智能管理系統(tǒng)研究[D]. 合肥: 安徽大學(xué), 2019.ZHU C. Research on intelligent management system of plant protection insecticide lamp based on internet of things technology[D]. Hefei: Anhui University, 2019.
[55]? POPESCU D, STOICAN F, STAMATESCU G, et al. A survey of collaborative UAV-WSN systems for efficient monitoring[J]. Sensors, 2019, 19(21): 1-40.
[56]? AYAZ M, AMMAD-UDDIN M, SHARIF Z, et al. Internet-of-things (IOT)-based smart agriculture toward making the fields talk[J]. IEEE Access, 2019, 7: 129551-129583.
[57]? Michael P A. International climate protection[M]. Cham: Springer International Publishing, 2019: 93-97.
[58]? ?JEONGEUN K, SEUNGWON K, CHANYOUNG J, et al. Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications[J]. IEEE Access, 2019, 7: 105100-105115.
[59]? MADDIKUNTA P K R, HAKAK S, ALAZAB M, et al. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges[J]. IEEE Sensors Journal, 2021: 1-12.
[60]? BOURSIANIS A D, PAPADOPOULOU M S, DIAMANTOULAKIS P, et al. Internet of things (IOT) and agricultural unmanned aerial vehicles (UAVs) in smart farming: A comprehensive review[J]. Internet of Things, 2020. (in Press)
[61]? 沈?qū)殗? 范月圓, 楊妍, 等. 基于作物表型信息獲取的多旋翼飛行器應(yīng)用研究綜述[J]. 裝備制造技術(shù), 2019(8): 10-12, 29.SHEN B, FAN Y, YANG Y, et al. Research of multi-rotor aircraft application based on crop phenotyping acquisition[J]. Equipment Manufacturing Technology, 2019(8): 10-12, 29.
[62]? ALZAHRANI B, OUBBATI O S, BARNAWI A, et al. UAV assistance paradigm: State-of-the-art in applications and challenges[J]. Journal of Network and Computer Applications, 2020, 166: 1-44.
[63]? 宋慶恒, 鄭福春. 基于無人機的物聯(lián)網(wǎng)無線通信的潛力與方法[J]. 物聯(lián)網(wǎng)學(xué)報, 2019, 3(1): 82-89.SONG Q, ZHENG F. Potential and methods of wireless communications for Internet of things based on UAV[J]. Chinese Journal on Internet of Things, 2019, 3(1): 82-89.
[64]? 賈慧, 楊柳, 鄭景飚. 無人機遙感技術(shù)在森林資源調(diào)查中的應(yīng)用研究進展[J]. 浙江林業(yè)科技, 2018, 38(4): 89-97.JIA H, YANG L, ZHENG J. Advances of uav remote sensing applied in forest resources investigation[J]. Journal of Zhejiang Forestry Science and Technology, 2018, 38(4): 89-97.
[65]? 唐鵬飛, 田晶. 無人機在未來農(nóng)機中的應(yīng)用及發(fā)展趨勢[J]. 南方農(nóng)機, 2020, 51(16): 53-54.TANG P, TIAN J. Application and development of uav in future agricultural machinery[J]. China Southern Agricultural Machinery, 2020, 51(16): 53-54.
[66]? 嚴浙平, 楊澤文, 王璐, 等. 馬爾科夫理論在無人系統(tǒng)中的研究現(xiàn)狀[J]. 中國艦船研究, 2018, 13(6): 9-18.YAN Z, YANG Z, WANG L, et al. Research status of markov theory in unmanned systems[J]. Chinese Journal of Ship Research, 2018, 13(6): 9-18.
[67]? 肖強, 王志博, 郭華偉. 植保無人機在茶園的應(yīng)用與發(fā)展前景[J]. 中國茶葉, 2019, 41(4): 16-18.XIAO Q, WANG Z, GUO H. Application and development prospect of plant protection UAV in tea garden[J]. China Tea, 2019, 41(4): 16-18.
[68] 何道敬, 杜曉, 喬銀榮, 等. 無人機信息安全研究綜述[J]. 計算機學(xué)報, 2019, 42(5): 1076-1094.HE D, DU X, QIAO Y, et al. A survey on cyber security of unmanned aerial vehicles[J]. Chinese Journal of Computers, 2019, 42(5): 1076-1094.
[69]? 何勇, 吳劍堅, 方慧, 等. 植保無人機霧滴沉積效果研究綜述[J]. 浙江大學(xué)學(xué)報(農(nóng)業(yè)與生命科學(xué)版), 2018, 44(4): 392-398.HE Y, WU J, FANG H, et al. Research on deposition effect of droplets based on plant protection unmanned aerial vehicle: A review[J]. Journal of Zhejiang University(Agriculture and Life Sciences), 2018, 44(4): 392-398.
[70]? 陳鵬飛. 無人機在農(nóng)業(yè)中的應(yīng)用現(xiàn)狀與展望[J]. 浙江大學(xué)學(xué)報 (農(nóng)業(yè)與生命科學(xué)版), 2018, 44(4): 399-406.CHEN P. Applications and trends of unmanned aerial vehicle in agriculture[J]. Journal of Zhejiang University(Agriculture and Life Sciences), 2018, 44(4): 399-406.
[71]? 付婷婷, 鄧永卓, 韓志江. 無人機在現(xiàn)代農(nóng)業(yè)生產(chǎn)中的應(yīng)用[J]. 天津農(nóng)林科技, 2017(4): 14-15.FU T, DENG Y, HAN Z. Application of uav in modern agricultural production[J]. Science and Technology of Tianjin Agriculture and Forestry, 2017(4): 14-15.
[72]? 尚楊, 劉潤南, 文雯. 警用無人機實際應(yīng)用及存在的問題分析[J]. 無線互聯(lián)科技, 2020, 17(10): 15-17, 29.SHANG Y, LIU R, WEN W. Practical application and existing problem analysis of police unmanned aerial vehicle[J]. Wireless Internet Technology, 2020, 17(10): 15-17, 29.
[73]? 隋宇, 寧平凡, 牛萍娟, 等. 面向架空輸電線路的掛載無人機電力巡檢技術(shù)研究綜述[J]. 電網(wǎng)技術(shù), 1-15.SUI Y, NING P, NIU P, et al. Review on mounted uav for transmission line inspection[J]. Power System Technology, 1-15.
[74]? Datonhooya, 大載重?zé)o人機[EB/OL]. [2021-02-03]. https://item.taobao.com/item.htm?id=616035356201.
[75]? 楊星, 舒磊, 黃凱, 等. 太陽能殺蟲燈物聯(lián)網(wǎng)故障診斷特征分析及潛在挑戰(zhàn)[J]. 智慧農(nóng)業(yè)(中英文), 2020, 2(2): 11-27.YANG X, SHU L, HUANG K, et al. Characteristics analysis and challenges for fault diagnosis in solar insecticidal lamps Internet of Things[J]. Smart Agriculture, 2020, 2(2): 11-27.
[76]? SHUANG K, LI K, SHU L, et al. High voltage discharge exhibits severe effect on zigbee-based device in solar insecticidal lamps Internet of Things[J]. IEEE Wireless Communications, 2020, 27(6): 140-145.
[77]? 神捕, 太陽能殺蟲燈[EB/OL]. [2021-02-03]. https://item.taobao.com/item.htm?id=563277494013.
[78]? HUANG K, LI K, SHU L, et al. Demo abstract: High voltage discharge exhibits severe effect on zigbee-based device in solar insecticidal lamps Internet of Things[C]// IEEE INFOCOM 2020-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS). Piscataway, New York, USA: IEEE, 2020: 1266-1267.
[79]? 人民日報海外版, 蟲口奪糧,昆蟲雷達助力戰(zhàn)“妖蛾”[EB/OL]. (2020-08-17) [2021-02-03]. http://paper.people.com.cn/rmrbhwb/html/2020-08/17/content_2003608.htm.
[80]? 邢麗芬, 樊豐繼, 陳啟聰, 等. 一種太陽能電池板的防盜定位結(jié)構(gòu): 中國, CN201927618U[P]. 2011-08-10.XING L, FAN F, CHEN Q, et al. Anti-theft positioning structure of solar panel: China, CN201927618U[P]. 2011-08-10.
[81]? YANG X, SHU L, CHEN J, et al. A Survey on smart agriculture development modes, technologies, and security and privacy challenges[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(2): 273-302.
[82]? FRIHA O, FERRAG M A, SHU L, et al. Internet of things for the future of smart agriculture: Comprehensive survey of emerging technologies[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(4): 718-752.
Design and Prospect for Anti-theft and Anti-destruction of Nodes in Solar Insecticidal Lamps Internet of Things
HUANG Kai1,2, SHU Lei2,3*, LI Kailiang2, YANG Xing2, ZHU Yan1, WANG Xiaochan4, SU Qin2
(1.National Engineering and Technology Center for Information Agriculture, Nanjing 210095, China; 2.College of Artificial Intelligence, Nanjing Agricultural University, Nanjing 210031, China; 3.School of Engineering, University of Lincoln, Lincoln, LN67TS, U.K.; 4.College of Engineering, Nanjing Agricultural University, Nanjing 210031, China)
Abstract: Solar insecticidal lamps (SILs) are widely used in agriculture for the purpose of effectively controlling pests and reducing pesticide dosage. With the increasing deployment of SILs, there are more and more reports about theft and destruction of SILs, seriously affecting the pest control effect and leading to great economic losses. Unfortunately, many efforts remain unsuccessful, since people can destruct the components of SIL in part but not steal the whole SIL, which cannot be detected by GPRS module or can only be labeled as a fault of component. To realize the broader effect of anti-theft and anti-destruction in the scenario of Solar Insecticidal Lamps Internet of Things (SIL-IoTs), there were two types of designs which would enable substantial improvements. On one hand, SIL was reformed and designed to obtain more information from different kinds of sensors and increase the difficulty of theft and destruction of SILs. Four modules were equipped including gated switch, voltage and current module, emergency power module, acceleration sensor module. Gated switch was used to judge whether the gate of power was open or closed. Voltage and current module of battery, solar panel, lamp, and metal mesh were used to judge whether the components were stolen or destructed. Emergency power module was used for communication module after the battery being stolen. Acceleration sensor module was used to judge whether the SIL was shaking by stealer. On the other hand, the auxiliary equipment of SIL, i.e., unmanned aerial vehicle insecticidal lamp (UAV-IL), was put forward for emergency applications after theft and destruction of SIL, e.g., deployment, tracking, patrol inspection, and so on. Through the above-mentioned hardware design and application of UAV-IL, more information from different kinds of sensors could be obtained to make judgements about the situation of theft and destruction. However, considering the short occurrence time of theft and destruction, the design was not enough to realize fast and accurate judgments. Therefore, six key research issues in the design of internal hardware, software algorithm and appearance structure design level were discussed, including 1) optimal design of anti-theft and anti-destruction of SILs; 2) establishment of anti-theft and anti-destruction judgment rules of SILs; 3) fast and accurate judgments of theft and destruction of SILs; 4) emergency measures after theft and destruction of SILs; and 5) prediction and prevention of theft and destruction of SILs; 6) optimal calculation to reduce the load of network data transmission. The anti-theft and anti-destruction have crucial roles in equipment safety, which can be extended to various agricultural applications.
Key words: solar insecticidal lamp; anti-theft and anti-destruction; unmanned aerial vehicle insecticidal lamp; agricultural Internet of Things; node

- 智慧農(nóng)業(yè)(中英文)的其它文章
- 基于高光譜數(shù)據(jù)的玉米葉面積指數(shù)和生物量評估
- 基于Micro-CT的玉米籽粒顯微表型特征研究
- 利用多時序激光點云數(shù)據(jù)提取棉花表型參數(shù)方法
- Foxtail Millet Ear Detection Approach Based on YOLOv4 and Adaptive Anchor Box Adjustment
- 基于語義融合與模型蒸餾的農(nóng)業(yè)實體識別
- 面向植物病害識別的卷積神經(jīng)網(wǎng)絡(luò)精簡結(jié)構(gòu)Distilled-MobileNet模型