預測控制在永磁同步電機控制系統中的應用
2021-09-10 08:36:28韋國長
電子元器件與信息技術 2021年6期
韋國長
(廣西城市職業大學,廣西 崇左 532200)
0 引言
PMSM的結構精簡、體積小、功率大、運行慣量低等,由PMSM構成的伺服結構于航空航天、以及機器人等領域取得了普遍使用。PMSM 一般選擇矢量控制手段,因PMSM特殊的非線性特點,當產生參數改變、負載擾動以及創模不正確時將降低控制質量,所以需要采取新方法提升其控制效果。
預測控制屬于先進的計算機管控算法,對于模型預測控制有良好的寬容性,由此使之被普遍用在繁瑣的工業過程管理方面,預測控制存在滾動優化與反饋校正等特征,所以存在強大的魯棒性。近幾年,有關PMSM預測控制的探究不斷增多, 其中有些直接采取線性預測控制手段,最終效果較差,但選擇神經系統預測控制手段就難以保障實時性。文章基于PMSM非線性模型,基于微分中值定理優化了非線性模型,再采取線性預測控制手段求出控制率模擬結果顯示,采取這種方法創建的PMSM調速系統有顯著效果。
1 PMSM數學模型與矢量管控
1.1 PMSM結構與分類
PMSM結構主要包含定子、端蓋與轉子等。定子選擇和一般電機相似的剛疊片結構,由此保證在電機轉動時降低損耗,其繞組模式能分成分布短距結構、整距結構與非規則結構[1]。轉子是永磁體,永磁體原料一般選擇稀土材料等生產,涉及實心與疊片兩類。
PMSM按照運行形式差異能分成PMSM與無刷直流電機;按照永磁材料類型的多少,能分成單一式結構與混合式結構;按照永磁體設置位置差異,分成旋轉電樞式與旋轉磁極式;按照永磁體安裝形式差異,能分成表貼式、內嵌式以及內裝式,見圖1,表貼式把永磁磁鋼設置于轉子鐵芯表層,其d、q軸相對稱,q軸與d軸電感相同,即Lq=Ld,與隱極同步電機相似。
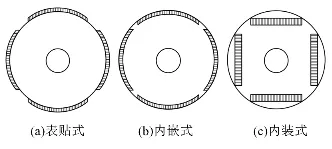
圖1 PMSM 轉子結構圖
內嵌式和內裝式的不同之處是內嵌式把永磁磁鋼嵌進轉子外表層,而內裝式把永磁磁鋼設置于轉子鐵芯之中,這時電機q軸電感Lq>d軸電感Ld,磁路交叉,磁路氣隙不大,而且因其特別的安裝形式,機械強度大,適用作高速轉動。
1.2 PMSM運行原理
通過上述分析,PMSM因控制模式差異,能分成PMSM與無刷直流電機,PMSM根據正弦波形式管理,無刷直流電機根據方波形式管理[2]。所以,在探究正弦波形式管理的PMSM時,能將之看作只把電勵磁換成磁體勵磁的設備。當電機穩定轉動且電力系統電壓頻率不變時,其轉子速度就是一個常數,同時不受負載高低作用,即是同步運速,見式(1)所示:

式中,n表示電機運速,ns表示同步運速,f表示電力系統電壓頻率,Pn表示設備極對數。所以,轉子磁場會和定子圓形構成旋轉磁動所產生的磁場會以相同速度旋轉,且產生一個氣隙組成磁場[3]。氣隙組成磁場和轉子磁場形成作用就會出現電磁轉矩,如果轉子磁場超過氣隙組成磁場時,轉子會和形成的電磁轉矩不同方向旋轉,那么PMSM處在發電狀態;如果轉子磁場落后氣隙組成磁場時,轉子會和形成的電磁轉矩相同方向轉動,那么PMSM處在電動狀態。
1.3 數學模型
精準創建數學模型是研究控制系統的前提條件,但PMSM屬于一種強耦合、多輸入和多非線性結構,因此在創模時,為了便于分析,一般選擇簡化模型:①忽視定轉子鐵芯阻力,忽視PMSM磁滯消耗與渦流消耗;②忽視生產工藝偏差,定子三相繞組于空間內嚴格根據120°對稱分布規劃;③永磁體磁導率=空氣磁導率,能忽視電導率,其于氣隙方面出現的磁場是正弦布置;④定子三相繞組于氣隙方面形成的電樞反應磁場與感應電動勢都是正弦布置。
2 DMC算法
預測控制屬于一種依靠模型的計算機管理算法,其基本特點是借助過程模型預計系統的今后行為,其使用當下與過去的誤差值和預計模型來估測過程今后的誤差值,通過滾動明確當前的最好輸入方法[4]。其結構如圖2所示。
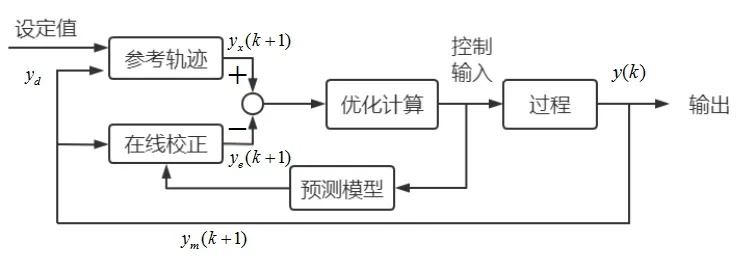
圖2 DMC 算法結構圖
預測控制方面的DMC算法是依靠對象的階躍響應系統,創模容易,采取滾動式有限時域完善措施與實時反饋校正方法,提高了模型的魯棒性,準確校正由于系統失配、時變以及環境影響等因素造成的不確定性。主要涉及預測系統、滾動完善、反饋校正。
2.1 預測系統
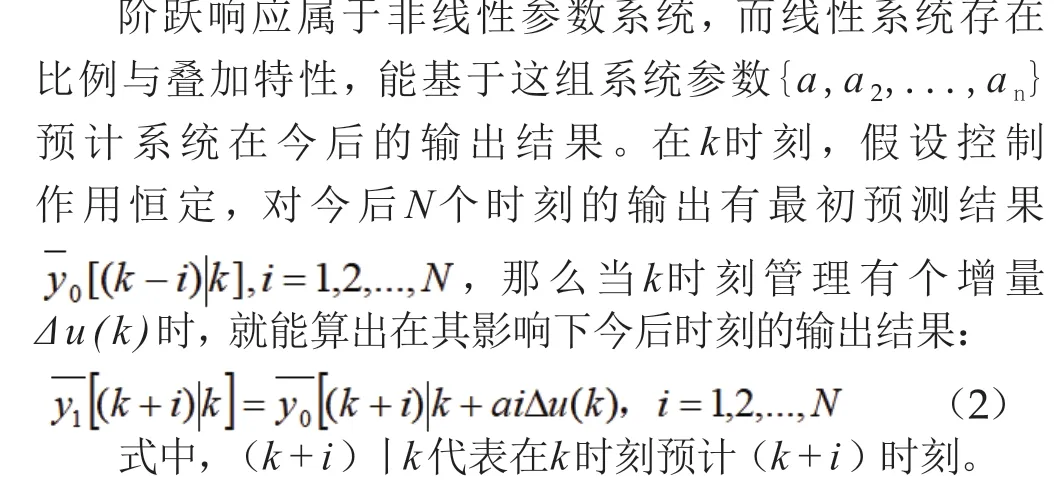
對于DMC算法,先檢測對象部分階躍響應的取樣值ai=a(iT), i=1,2,...,而T表示取樣周期。針對漸進可靠的對象,階躍響應于某個時刻tn=NT后越來越穩定,導致a(i>N)和an的偏差及量化偏差和檢測偏差有一樣的數量級,所以能認為an已近似為階躍響應的穩定值an=a(∞)[5]。如此一來,對象的動態數據就能夠近似以有限集合{a,a2,...,an}進行描述,該集合的參量組成了DMC的系統參數,向量a={a,a2,...,an}T是模型向量,N就是創模時域。
2.2 滾動完善
k時刻的完善性能指標能取:

式中:q i、r j為權值,其分別代表對追蹤偏差和控制量變化的制約。k時刻條件下,為了讓J(k)是最小值,設置:

通過式(4)求出dΔu(k),...,dΔu(k+M-1)的最好值,可是DMC并不將其都作為要實現的解,僅僅取控制增量Δu(k)組成實際管理式(4)作用在被控對象上。進入下個時刻,其又出現相似的完善問題求得Δu(k+1),即“滾動優化”方法。
2.3 反饋校正
在k時刻將管理u(k)加于對象時,就像在對象輸入端添加一個幅值是Δu(H)的階躍,基于預測系統,計算在其作用下以后時刻的輸出預測結果。

因實際環節有系統失配、環境影響等各種因素,通過式(5)就得的預測結果通常會與實際值存在誤差,指:

DMC算法基于實時預測偏差預測今后的輸出偏差,由此校正以后時刻的傳輸預測值,否則持續的優化將基于虛假前提[6]。因對偏差的形成缺少因果性描述,所以偏差預測僅能選擇時間序列法,采取這種偏差數據用加權方式預測今后的偏差,能獲得校正后的預測結果。校正后的結果經移位組成(k+1)時刻的最早預測值,整個管理過程就以此反復在線處理。
3 結束語
文章對于PMSM調速系統,制定了一種預測控制措施,經研究其數學模型且基于微分中值定理,把PMSM調速結構的非線性關系精簡成時變的線性聯系,進而能夠依靠線性預測管理原理簡單的規劃控制器,模擬結果顯示,本文提出的辦法是有用的。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
