十字梁六維力傳感器應變組橋方式對維間串擾的影響
2021-09-10 13:43:42王拓
電子樂園·下旬刊 2021年1期




摘要:在載荷作用下六維力傳感器不同方向輸出存在互相干擾,如何降低串擾是多維力傳感器技術中面臨的主要問題。惠斯通電橋法是其中手段之一,是當前應變式傳感器信號采集的主要方式。但六維力傳感器包含的應變片數量較多,電橋電路不止一種組建方式,組橋形式對維間串擾精度的影響決定了傳感器精度設計時的硬件選擇和成本控制。為避免工藝、實測偏差等因素影響,本文主要通過對十字梁六維力傳感器不同組橋形式下的仿真參數計算對比,分析應變組橋方式對維間串擾的影響。
關鍵詞:六維力傳感器;維間串擾;差動全橋
0 引言
應變式力傳感器的工作原理是在力作用下彈性體表面產生應變,引起粘貼的應變片阻值變化,通過惠斯通電橋將機械信號轉化為電信號[1],再經過標定等運算處理后得到加載力值大小。六維力傳感器是一種可以檢測空間坐標系下X方向力和繞X坐標軸的扭矩、Y方向力和繞Y坐標軸的扭矩、Z方向力和繞Z坐標軸的扭矩這六個維度的力參數的力傳感器[2],隨著測力維度數量的增加,各個參量之間的相互影響也越來越大,該影響程度稱為維間串擾(耦合),如X、Y向的力對Z向的扭矩的串擾。
串擾的產生的根本原因是在檢測非主方向力的應變片上檢測到了應變的存在,從而通過電橋產生了輸出[3]。串擾應變的產生是彈性材料結構上的固有性質,串擾較大時很難通過算法解耦。應變串擾雖然無法完全消除,但由于十字梁傳感器結構對稱,串擾應變常常是成對出現且大小相等,可以通過改變應變電橋組橋形式來減小非主方向的電橋電壓輸出。
1 電橋輸出與應力關系
六維力傳感器組成橋路的應變片一般為四個,分布在彈性梁相對對稱的位置組成差動全橋電路。在檢測到力的存在時,一個橋路有兩對應變片的輸出應變大小相等方向相反且每對中的兩個應變片的輸出等大同向,分布在不同半橋的相對位置(如圖1所示的R1和R3、R2和R4位置),橋路中相鄰的應變片檢測應變方向相反。
金屬箔式應變片是將金屬絲經高溫液化后高壓高速噴射,霧化沉積在基片上形成3~10μm層,再用光刻腐蝕法形成電路。其優點是:橫向效應小,允許電流大,柔性好、蠕變小、疲勞壽命長,生產效率高。金屬絲在外界力的作用下產生機械變形時,其電阻值相應發生變化。如圖2所示其電阻變化率為
其中K稱為單根金屬絲的靈敏度,即單位應變的電阻變化率。ρ電阻率;ε 應變;μ泊松比;λ壓阻系數;E彈性模量
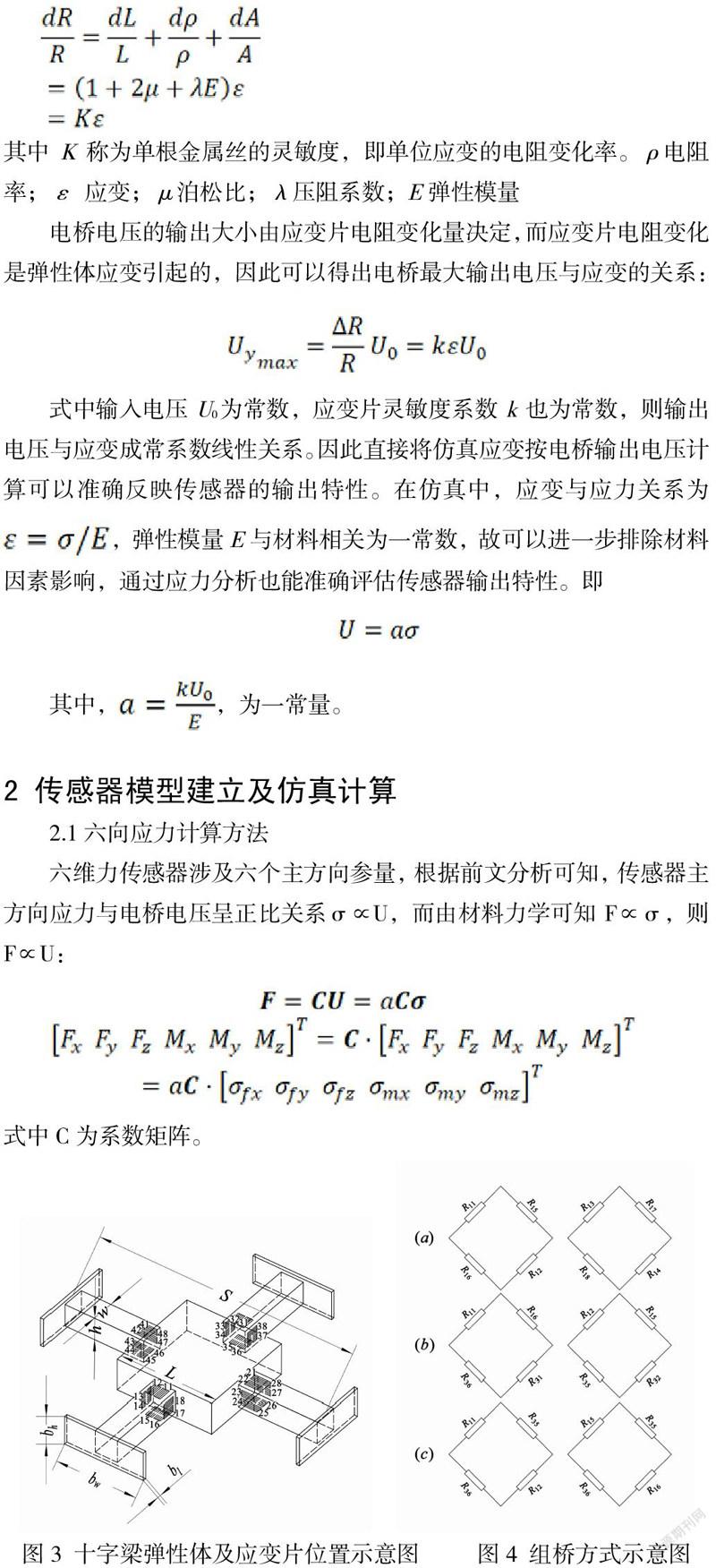
電橋電壓的輸出大小由應變片電阻變化量決定,而應變片電阻變化是彈性體應變引起的,因此可以得出電橋最大輸出電壓與應變的關系:
式中輸入電壓U0為常數,應變片靈敏度系數k也為常數,則輸出電壓與應變成常系數線性關系。因此直接將仿真應變按電橋輸出電壓計算可以準確反映傳感器的輸出特性。在仿真中,應變與應力關系為,彈性模量E與材料相關為一常數,故可以進一步排除材料因素影響,通過應力分析也能準確評估傳感器輸出特性。即
2 傳感器模型建立及仿真計算
2.1六向應力計算方法
六維力傳感器涉及六個主方向參量,根據前文分析可知,傳感器主方向應力與電橋電壓呈正比關系σ∝U,而由材料力學可知F∝σ,則F∝U:
式中C為系數矩陣。
圖3所示一種常見的十字梁六維力傳感器彈性體,共有四根短橫梁,應變片粘貼在彈性梁靠傳感器中心的位置,每根梁粘貼8個應變片,每四個應變片可以組成一路全橋電橋。根據全橋最大電壓原理,可以形成單梁自組橋形式(如圖4a)、相對梁單側組橋形式(如圖4b)和相對梁對側組橋形式(如圖4c)。根據應力與電橋電壓輸出特性,各方向應力為:
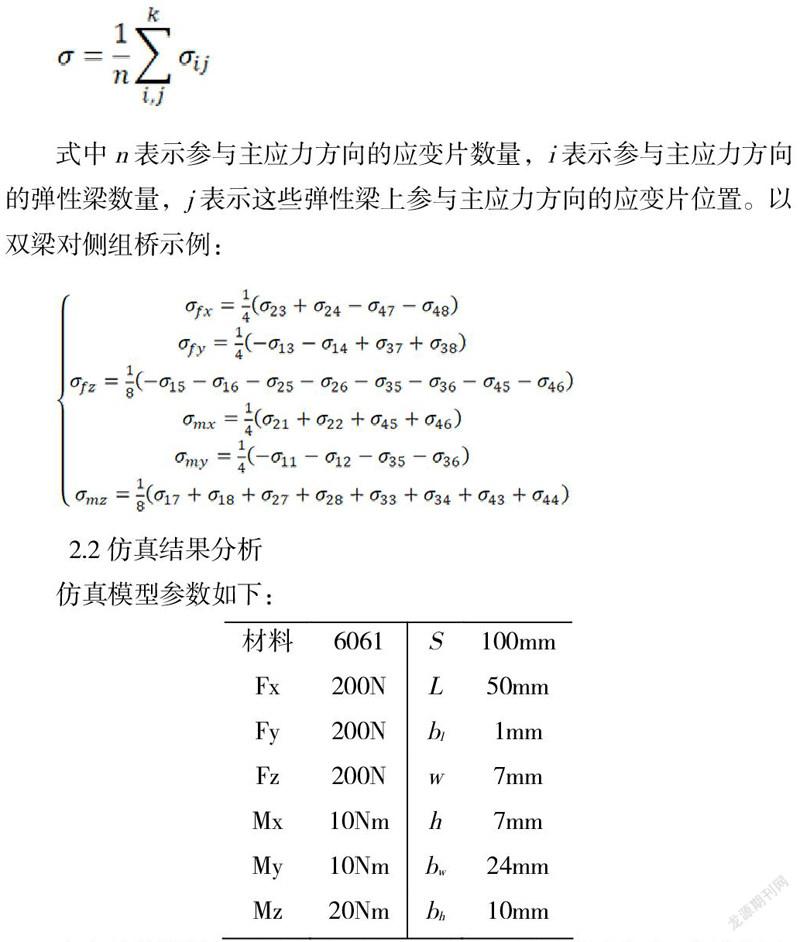
式中n表示參與主應力方向的應變片數量,i表示參與主應力方向的彈性梁數量,j表示這些彈性梁上參與主應力方向的應變片位置。以雙梁對側組橋示例:
2.2仿真結果分析
仿真模型參數如下:
應變片檢測的是彈性體表面應變,方向為柵絲長度方向,但實際上彈性梁在受力時表面為二向應力狀態,垂直主應變方向也存在應變量,故在仿真中需要指定應力方向,設置沿彈性梁長度方向求解方向應變(normal stress)表征應變片實際工作狀態。為保證參數一致性,應力仿真區域應設置為應變片粘貼區域,選取的區域尺寸應絕對對稱和相等。同時加載力應作用于彈性體形心位置,避免引入偏置載荷。使用ANSYS Workbench仿真結果如下(篇幅有限僅以Fx加載應力示例,下同):
II類誤差值是評價六維力傳感器解耦算法優劣性的重要指標,反映了該方向未施加力/力矩時,他其方向施加的力/力矩值對該方向信號產生的干擾[4]。
其中,yi(F.S)表示i方向可施加力/力矩的滿量程值,ysi(max)表示當s(s=j,k,l,m,n)方向施加力/力矩值,其他方向無作用力/力矩時,i方向測得的最大值。則各橋路應力及串擾誤差分別計算的結果如下:
由表1可以看出,當力Fx作用時,雖然σ23為主方向應力17.9Mpa,但在決定Mx向的σ21上同時輸出了-8Mpa的應力值,這反映了彎曲正應力對切應力的影響。應力橋路會將這種耦合影響同時輸出,如果應力變化同向且位于同橋臂,如雙梁對側橋路,那么橋路輸出占比就會變大,串擾誤差就會增大。
但在表2中Fx作用下σmx的值卻非常小,說明在Fx作用時,組成Mx測力輸出的橋路,兩個變化方向相同(相反)的應變片剛好分布在相同(不同)橋臂上,使橋路輸出幾乎為零,從而整體表現為僅存在主方向Fx的輸出,這就形成了一種硬件解耦的方式。
由表格結果來看,單梁橋路的維間串擾低于雙梁橋路,表現為傳感器整體的精度較高。因此在十字梁六維力傳感器設計時,優先選用單梁自組橋方式,具有更高的設計精度。
3 結論
本文通過對十字梁型六維力傳感器的應力仿真參數進行分析計算,得出了傳感器單梁組橋的串擾誤差比雙梁組橋更小的結論,并且基于應力原始數據對單梁組橋優異性機理進行了分析,為后續六維力傳感器的橋式電路設計和選擇提供借鑒。
本文僅對電橋形式產生的串擾結果進行了比對判斷,但原始應力串擾的產生原因仍是需要進一步研究的內容,通過仿真結果和彈性體結構可以初步判斷,彈性梁的支承結構及尺寸是應力串擾產生的關鍵影響因素。如果最原始的應力串擾輸出可以大幅削減,那么這種多維力傳感器使用精度將大幅提高,對航空航天風洞試驗測試、船舶潛艇容壓檢測等具有重要意義。
參考文獻
[1]Perry D. Multi-Axis Force and Torque Sensing[J]. Sens Rev,1997,17: 117 - 120.
[2]肖汶斌,董文才. 六維力傳感器靜態解耦算法[N]. 武漢: 海軍 工程大學學報,2012.
[3]Ma Junqing,Song Aiguo,Xiao Jing. A Robust Static Decoupling Algorithm for 3-Axis Force Sensors Based on Coupling Error Model and ε-SVR[J]. MDPI. Basel,Switzerland. October,2012,12 ( 11) : 14537 - 14555.
[4]徐科軍,李成.多維力傳感器靜態解耦的研宄[J].合肥工業大學學報(自然科學版),1999,(02):3-8.
作者簡介:王拓1994年11月;性別:男;民族:漢;籍貫:河南省南陽市;職務職稱:格力電器裝備動力技術研究院專業研究組組長/助理工程師;學歷:本科;單位:珠海格力電器股份有限公司;研究方向:傳感器及智能裝備