蔬菜精整作畦聯合播種機設計與試驗*
2021-09-13 01:22:18成松松周春健朱春燕黃嘉俊范濤
中國農機化學報 2021年8期
關鍵詞:作業
成松松,周春健,朱春燕,黃嘉俊,范濤
(上海市農業機械研究,上海市,201106)
0 引言
上海是一個常住人口2 400多萬的大都市,綠葉菜的有效供給是一項重要的民生任務,其消費量占蔬菜消費量的50%以上。由于不適用長途運輸,85%以上的綠葉菜都依靠本地生產。當前上海綠葉菜生產面臨著不少困難,其中農村勞動力成本上升、生產人員老齡化和機械化程度低等因素嚴重制約了上海蔬菜機械化生產的持續發展[1-2]。
作畦、播種作為機械化生產的關鍵環節,其作業效果的好壞不僅影響到綠葉菜品質與生產效率,而且也直接影響到上海綠葉菜生產全程機械化的整體水平。通過對上海34家第一、第二批蔬菜機械化生產示范點調研可知,作畦機(起壟機)擁有率達70.6%,播種機擁有率達67.6%[3]。其中2BS-JT10播種機較為普遍,還有部分上海交大和矢崎公司生產的電動播種機[4]。這些機具相對人工播種,在一定程度上提高了作業效率,保證行距株距與深度基本一致,但由于手扶式機具操作相對不便,在運輸轉場轉彎掉頭時較為費勁,作業過程需要人工推行;作畦和播種分兩道作業,生產效率仍有待提高。國外對設施內適用的播種機進行了研究推廣,但由于價格高、維修難、適應性等問題未能大面積普及[5-6]。
針對這一現狀,研究開發一種適用于溫室設施內(兼用露地)作業,集作畦、播種、覆土、鎮壓等多種功能于一體的蔬菜精整作畦聯合播種機。通過排種器試驗和田間播種試驗相結合的方法,根據不同種子的播量要求和大小形狀等物理特性,設計不同孔徑孔數的窩眼輪。同時為滿足機械化收割要求,設計高度可調的作畦、鎮壓滾筒以保證畦面達到一定的堅實度。
1 整機結構與工作原理
1.1 整機結構
蔬菜精整作畦聯合播種機的整機結構如圖1所示,主要由取土圓盤、作畦滾筒、排種器總成、傳動系統和鎮壓滾筒五大部分組成。
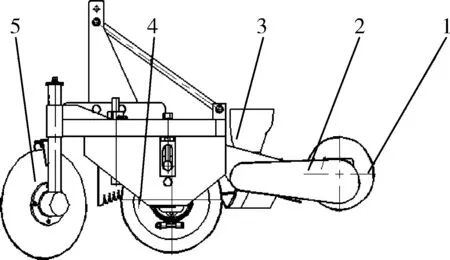
圖1 整機結構圖Fig.1 Structure diagram of whole machine1.鎮壓滾筒 2.傳動系統 3.排種器總成 4.作畦滾筒 5.取土圓盤
整機配套動力:25.8~44.1 kW大棚王拖拉機(帶液壓輸出),目前雷沃M404L-E與M604L-E在各個園藝場使用較為普遍,本項試驗配套動力選用雷沃M604L-E拖拉機(帶液壓輸出)。
1.2 機具工作條件、原理及主要技術參數
該機具適用于上海地區常見的雞毛菜、菠菜、米莧、茼蒿等高密度條播綠葉菜的作畦播種聯合作業,以滿足機械化收割要求,適應上海蔬菜生產全程機械化[7]。
作業前對田塊進行精整旋耕,旋耕深度120 mm,保證土壤無明顯結塊。土壤干基含水率16.3%~18.2%為最佳,改善土壤物理生物特性以適應蔬菜的生長[8]。根據土壤旋耕細碎程度調整取土圓盤的高度、角度,使得圓盤在拖拉機的牽引下能夠入土一定深度,并且可以順暢的旋轉取土。再通過位于圓盤與作畦滾筒中間的刮土板,將兩側的土勻到機具中間。調整作畦滾筒高度,通過拖拉機的液壓輸出,配合使用調速閥與液壓馬達,帶動作畦滾筒旋轉,目的在于提高單位時間內單位面積上畦表面土的鎮壓頻次,增強鎮壓效果[9]。排種器總成與鎮壓滾筒剛性連接于機架上,通過鎮壓滾筒與畦面的摩擦轉動,經鏈條傳動帶動排種器窩眼輪轉動,從而實現作業的全過程。整機的主要技術參數如表1所示。
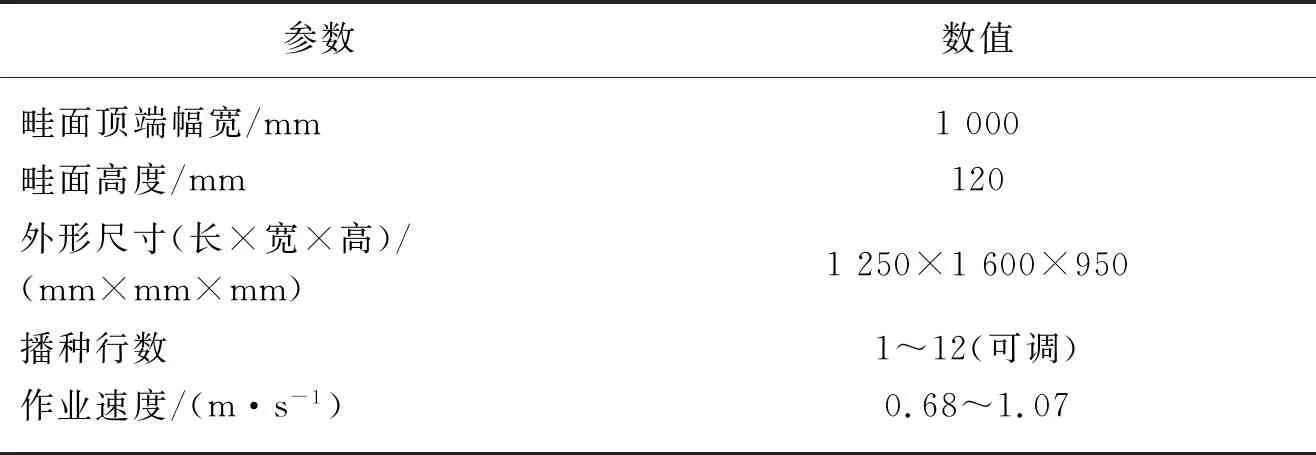
表1 整機主要技術參數Tab.1 Main technical parameters of whole machine
2 關鍵部件設計
2.1 作畦滾筒機構設計
近些年歐洲一些國家研制出了少量精細作畦機具,畦面土壤細碎且保證一定的堅實度為蔬菜的生長提供了良好的栽培條件[10-11],而國內在畦面堅實度對蔬菜種子不同時期的生長影響方面的研究較少。為此本文在分析葉菜類蔬菜作畦整地農藝要求的基礎上,設計一種滾筒直徑適宜且高度可調的作畦滾筒,為蔬菜種植提供高質量作畦機械,并為機械化收割做好前道工序準備。
2.1.1 滾筒直徑
作畦滾筒作為影響畦面質量的關鍵部件,在保證單位面積一定壓強條件下,作畦滾筒的直徑與土壤的壓實效果有較大的關聯,直徑越小,壓實效果越差。作畦滾筒的最小直徑應滿足[12]
式中:Dmin——作畦滾筒直徑,mm;
h——作畦滾筒壓實深度,mm;
α——作畦滾筒翻轉角,(°)。
由于雞毛菜、菠菜等綠葉菜的根系穿透土壤能力有限,為保證土壤的孔隙度以確保種子的出芽率及避免出現前期的倒伏情況[13-14],畦面不宜壓過實,取h=4 mm;為保證作畦滾筒能正常作業,應使滾筒翻轉角小于等于20°,取α=18°。經計算可知,作畦滾筒直徑Dmin=160 mm較為合適。
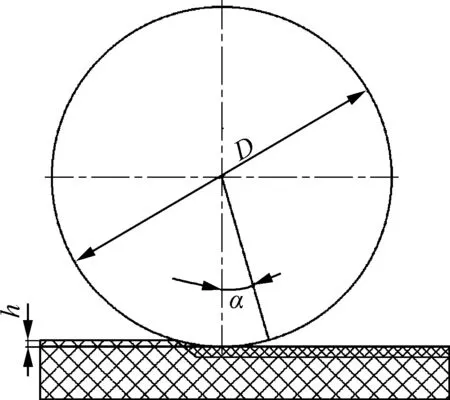
圖2 作畦滾筒工作圖Fig.2 Working drawing of roller
2.1.2 滾筒高度調節機構
調節機構如圖3所示。
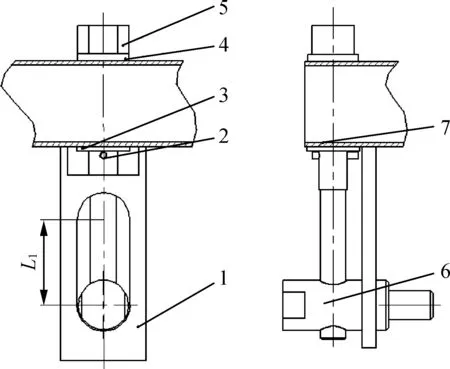
圖3 調節結構簡圖Fig.3 Schematic diagram of adjusting structure1.掛接管 2.彈性圓柱銷 3.墊圈 4.銅套 5.螺紋調節豎軸 6.螺紋調節橫軸 7.矩形管
為應對不同土壤條件,根據畦面的堅實度要求以及圓盤取土量的多少,可通過轉動螺紋調節豎軸帶動螺紋調節橫軸上下移動,從而對作畦滾筒進行高度調節,該高度調節部件結構簡單,調節過程輕便可靠。其中掛接管內開有長槽,長度L1=60 mm,并在長槽兩側增加刻度,使得作畦滾筒左右高度基本保持一致。
2.2 鎮壓滾筒機構設計
鎮壓是繼開溝、播種、覆土之后的一道工序,其作用是將覆蓋在種子上的土壤進行壓實處理,使種子與土壤充分接觸,更好地吸收土壤中的水分和養分,利于種子發芽[15]。鎮壓滾筒同時作為排種器的動力傳遞部件,通過與鎮壓滾筒連接的主動鏈輪轉動,經鏈條傳送到從動鏈輪連接的長方軸帶動排種器旋轉,從而實現排種器的播種作業。為此,鎮壓滾筒必須與畦面一直接觸轉動,其作畦滾筒的高度位置應設計為可調節。由于排種鎮壓總成部件與機架是剛性連接,要實現鎮壓效果就要求鎮壓滾筒能隨著畦面高度的變化自動調節,如圖4、圖5所示。

圖4 鎮壓滾筒高度調節Fig.4 Height adjustment of rolling1.鎮壓總成 2.定位螺栓 3.銷軸 4.機架掛接側板 5.鎮壓掛接側板
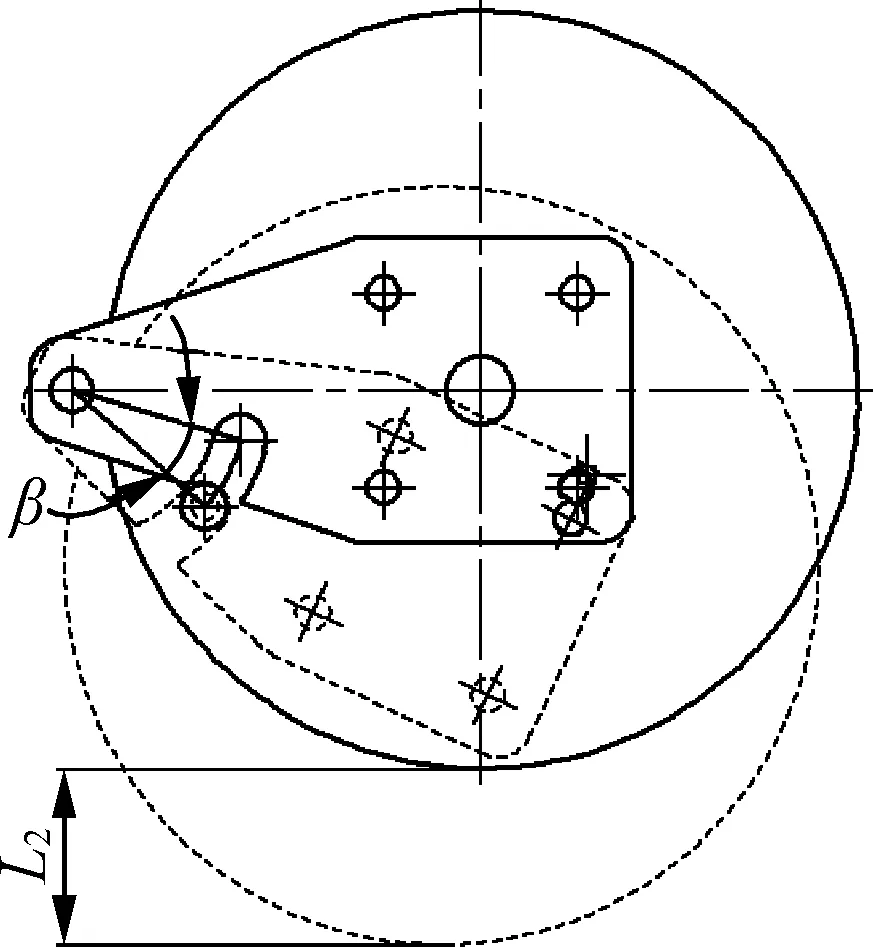
圖5 鎮壓滾筒高度差Fig.5 Height difference of rolling
定位螺栓固定在機架掛接側板上,鎮壓總成通過銷軸與鎮壓掛接側板連接。鎮壓掛接側板上開圓弧槽,使得畦面在高度變化時,鎮壓總成在重力作用下能夠繞著銷軸上下自由浮動。
以銷軸中心為圓心,定位螺栓中心為圓弧起點,圓弧槽槽頂為終點向上畫弧,該弧所對應的角度為β。通過CAXA 3D建模模擬,取β=28°,對應的鎮壓滾筒高度差L2=69.5 mm,L2>L1,即鎮壓滾筒的調節范圍大于作畦滾筒的高度調節范圍,可以保證鎮壓滾筒始終與畦面接觸轉動。同時在鎮壓滾筒上粘有魚骨紋橡膠墊,大大增加了鎮壓滾筒與地面之間的摩擦力,提高傳動可靠性。
2.3 排種器設計
2.3.1 排種器選型
播種質量是整機性能的重要體現,通過排種器臺架試驗,可以直觀地看出排種器的播種效果,有助于分析種子破碎率、轉速對不同孔徑窩眼輪充種率的影響以及計算理論播量。
由于機械式的排種機構結構簡單,使用維護操作方便,而且整機體積和重量都能得到一定程度的控制,因此,設計采用機械式的排種機構。通過市場調查,目前機械式蔬菜播種機基本都采用窩眼輪式的排種器,如圖6所示,經生產應用證明,其排種效果優于其他排種方式[16]。
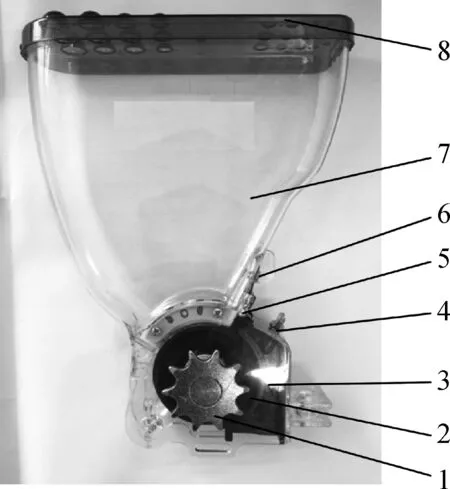
圖6 窩眼輪式排種器Fig.6 Vegetable seeding device of socket-roller1.排種器輪軸 2.窩眼輪 3.護種片 4.蝶形螺栓 5.毛刷 6.十字槽螺釘 7.種盒 8.種盒蓋
2.3.2 排種器臺架試驗及數據分析
搭建試驗臺架,采用西門子PLC轉速控制器,試驗種子為三系精品毛菜,排種器窩眼輪(孔徑×孔數)設計大孔(φ7×12)、中孔(φ5×12)、小孔(φ3×20),三種窩眼輪外徑均為60 mm。
調整毛刷、護種片與窩眼輪在排種器外殼內部的間隙,手動轉動排種器輪軸無明顯阻力。將排種器可靠固定在試驗臺架上,利用伺服電機配同步帶輪進行傳動。調整轉速控制器轉速,用電子天平稱量3種窩眼輪在不同轉速下的播種量。
每組工況試驗各進行3次,平均播種量詳見表2,單排大孔窩眼輪與單排中孔窩眼輪試驗時間均為2 min,雙排小孔窩眼輪由于播量少,稱量誤差大,因此試驗時間為5 min。適應機械化收割的雞毛菜理論每公頃播量為22.5~37.5 kg,結合稱量的數據計算可知,小孔窩眼輪播量太小,不符合實際生產時的播種量要求,因此在60~108 r/min這個轉速范圍內不再作測試。
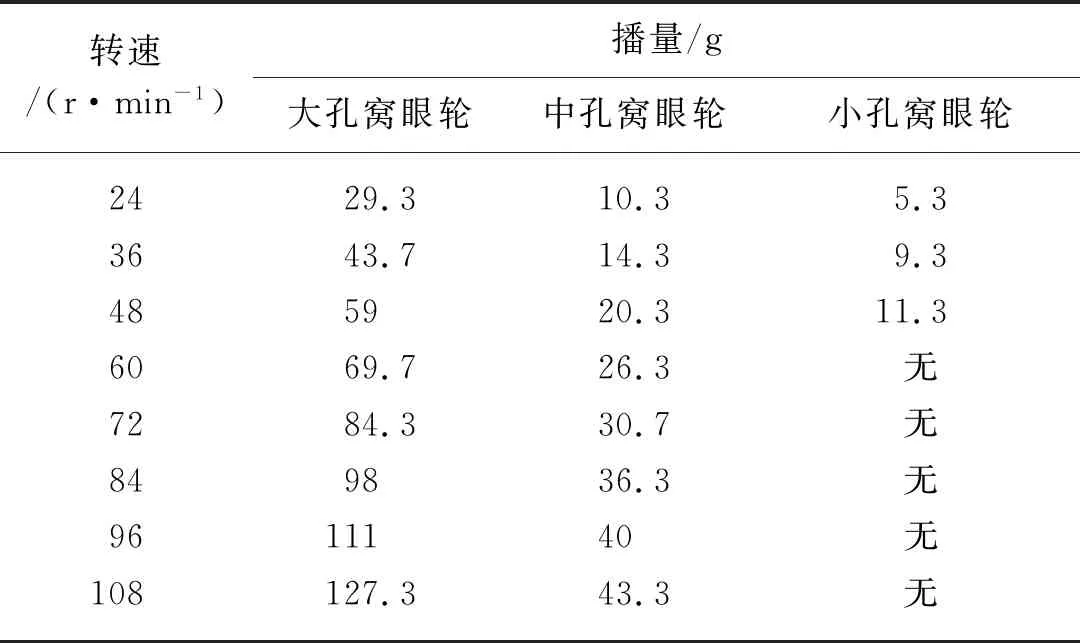
表2 三種窩眼輪在不同轉速下的播量Tab.2 Sowing of three kinds of seeding device at different speed
根據表2統計的播量平均值,繪制大孔、中孔窩眼輪在不同轉速下的播量及其增長量折線圖,以此來驗證轉速對窩眼輪充種率的影響,如圖7所示。
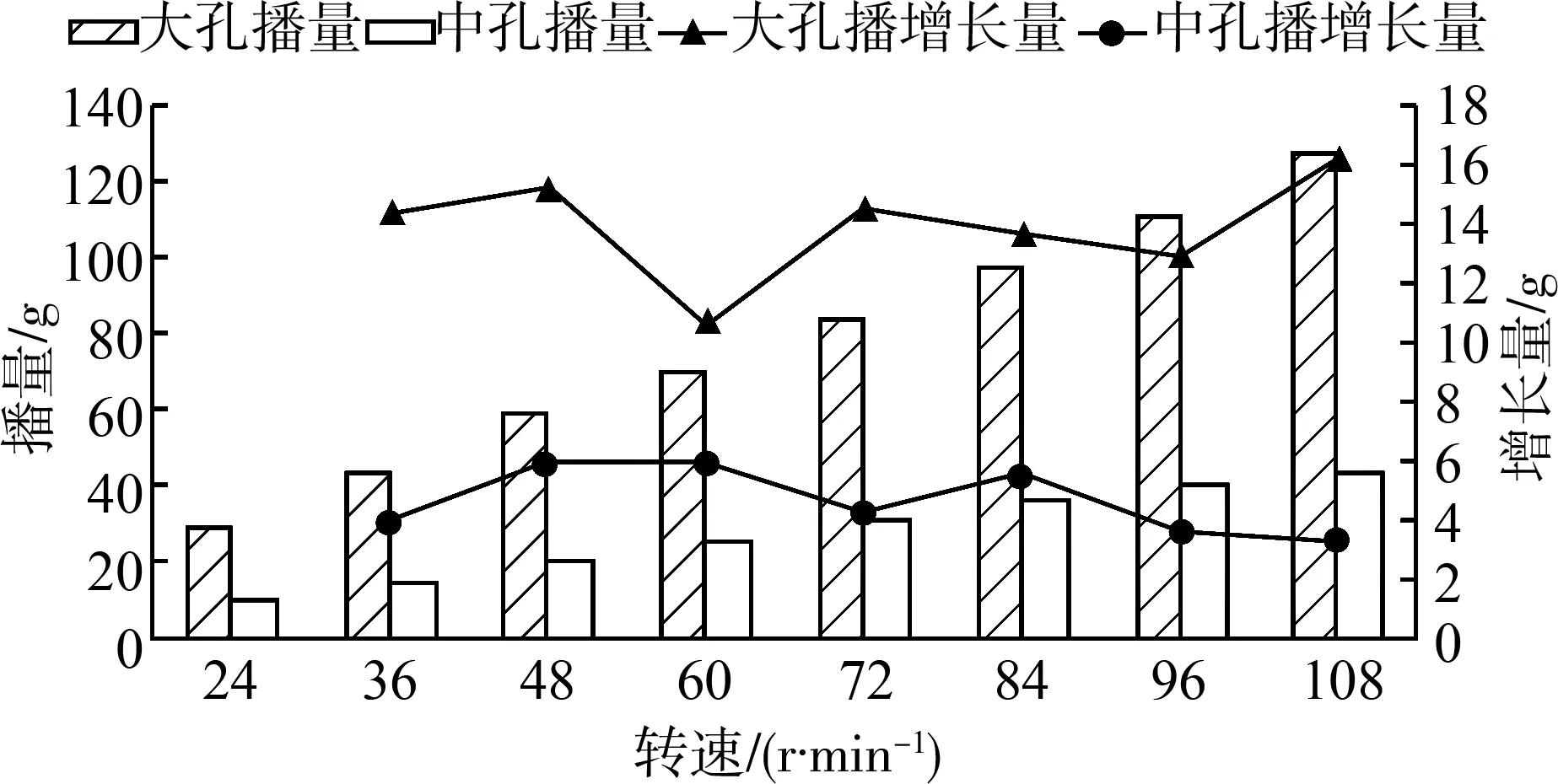
圖7 大孔、中孔窩眼輪在不同轉速下播量與增長量的關系圖Fig.7 Relation diagram of sowing quantity and growth quantity of the two seeding device at different rotating speeds
由圖7可知,在24~108 r/min這個轉速范圍內,隨著轉速的提高,大孔、中孔窩眼輪的播量基本保持線性增長,且其播量增長量呈上下無規律浮動現象。由此可以說明,在24~108 r/min這個轉速范圍內,轉速對窩眼輪的充種率無直接影響。試驗后種子破碎率小于0.1%。
通過試驗所得的播種量,計算這兩種窩眼輪是否滿足雞毛菜每公頃播量要求。查閱拖拉機說明書可知,雷沃M604L-E慢2擋前進速度v=0.68 m/s;鎮壓滾筒直徑d=0.273 m則其周長c=0.857 m;鎮壓滾筒轉速為0.68×60/0.857=47.6 r/min;機具寬度1.4 m,則每公頃所需的播種時間
t=s/v
翻譯目的論與很多關注原文的翻譯理論不同,他更加關注譯本,關注翻譯活動的目的,譯本的功能是否達成,因此目的論更加適用于分析具有功能性的非文學文本翻譯,新聞標題就是這樣一類文本,具有明確的語體特點、功能和交際目的。
式中:s——理論播完1 hm2所需前進的路程,則s=7 142.9 m;
v——拖拉機慢2擋前進速度,v=0.68 m/s。
計算可知,直線作業時播完1 hm2時間t=175.1 min。
設鏈輪傳動比為1:1,即鎮壓滾筒與排種器轉速相同,由表2,以轉速24 r/min,試驗時間2 min,單排大孔窩眼輪(φ7×12)為例。
每一轉播量為29.3/(24×2)=0.61 g。
單個排種器每分鐘播量為G單=0.61×47.6=29.04 g。
10個排種器總播量G總=10×G單×t=50 849 g。
設鏈輪傳動比為1∶1,即鎮壓滾筒與排種器轉速相同,由表2,以轉速24 r/min,試驗時間2 min,單排中孔窩眼輪(φ5×12)為例。
對比雞毛菜每公頃播量要求22.5~37.5 kg,單排大孔窩眼輪播量過大,而單排中孔播量不足。因此為滿足播量要求,調整鏈輪傳動比,其中與鎮壓滾筒連接的鏈輪為主動鏈輪,與排種器總成連接的為從動輪。同比例換算可知,使用大孔窩眼輪時,傳動比在2.26∶1~1.35∶1之間均滿足要求;使用中孔窩眼輪時,傳動比在1∶1.23~1∶2.04之間均滿足要求。在實際生產中,要盡量降低排種器轉速以達到最佳播種效果,因此優先選用大孔窩眼輪。
3 整機田間播種試驗
田間播種試驗是檢驗機具整體可靠性的關鍵環節,在臺架試驗分析的基礎上,進行多種種子田間播種試驗,并根據不同種子的播種要求,設置不同的傳動比以及選用孔徑孔數不同的窩眼輪,通過觀察播種后種子的出苗情況,測定機具的實際作業效果。
3.1 試驗條件
2019年1月,在上海市青浦區商榻星源農場進行雞毛菜田間播種試驗(圖8),播種長度為140 m,試驗前先整地。試驗播種行數10行,窩眼輪φ5×20,配套動力雷沃M604L-E輪式拖拉機。
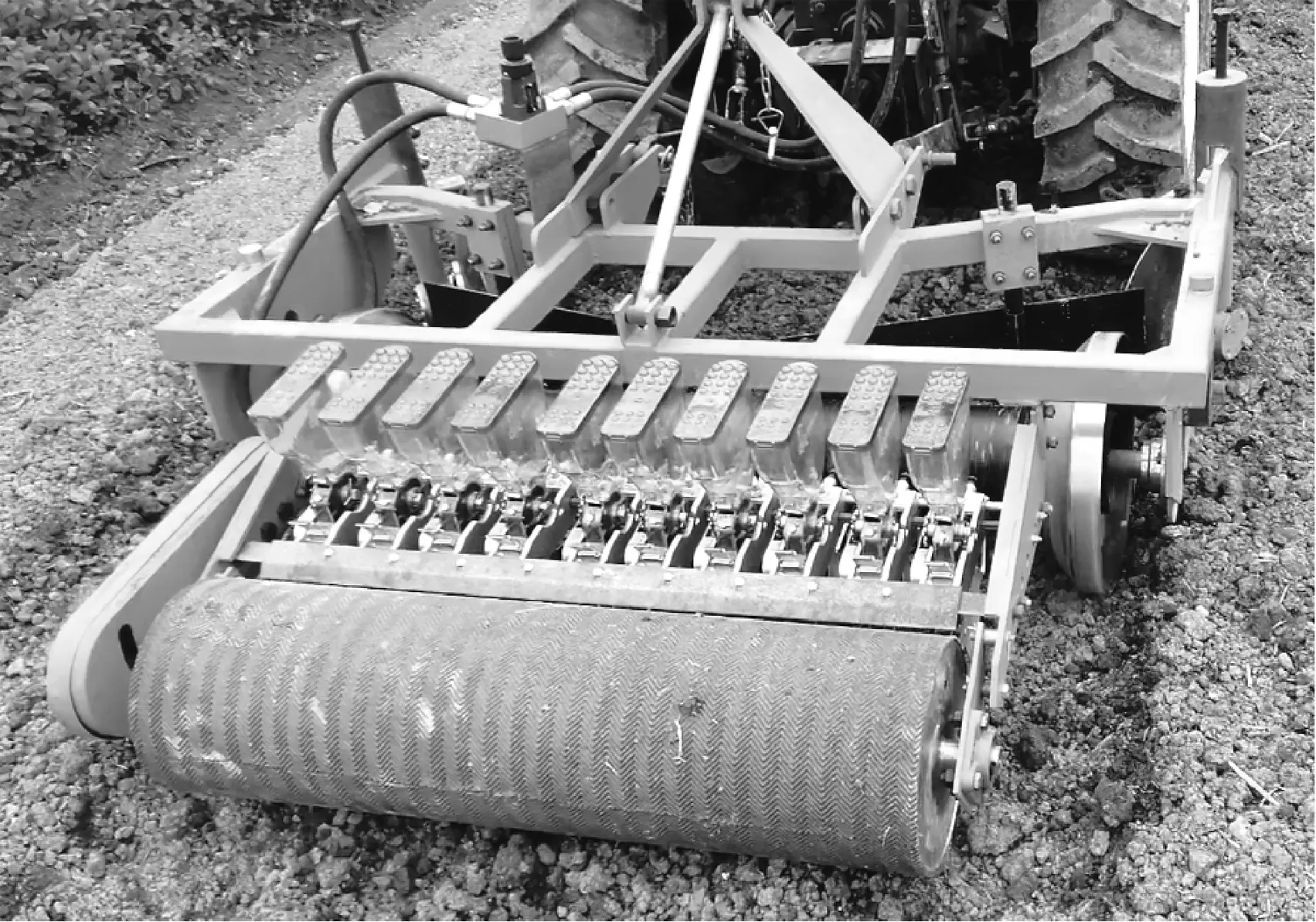
圖8 田間播種Fig.8 Field planting
2019年3月,在上海市農業科學院莊行基地進行菠菜、茼蒿田間播種試驗,播種長度32 m,試驗前先整地。試驗播種行數10行,菠菜選用窩眼輪φ6.5×30,茼蒿選用窩眼輪φ5×20,配套動力雷沃M604L-E輪式拖拉機。
3.2 試驗方法
試驗前對田塊進行精整旋耕,旋耕深度120 mm,保證土壤無明顯結塊,土壤干基含水率16.3%~18.2%。試驗采用拖拉機慢2檔前進,在40 m長的棚內作業,去掉兩端各4 m,取中間的32 m作為試驗區。試驗前在排種器內更換不同種子對應的窩眼輪,并更換對應的主、從動鏈輪。試驗前在10個排種器中加入相同質量的種子,每一種種子試驗完后,用電子秤分別稱量各個排種器中的種子剩余量。
3.3 試驗結果及分析
田間試驗表明,整機作業過程中取土圓盤取土效果明顯,利用土的流動性,土能夠在刮土板的作用下勻到機具中間。調整到合適高度、轉速的作畦滾筒做出的畦面是微微壓實,滿足實際生產及機械化收割要求。
通過試驗發現(表3),機具作業后畦面寬度1 000 mm,高度120 mm。雞毛菜的每公頃播量為24 348 g,菠菜的每公頃播量為63 853 g,茼蒿的每公頃播量為20 015 g,作業后的畦面質量及播量均滿足后續的機械化收割要求。

表3 播種試驗結果Tab.3 Results of seeding test
由表3可知,三種種子各行排量一致性都較為穩定,其中雞毛菜、菠菜都滿足理論播量要求,生長情況如圖9、圖10所示,并且畦面在作物的整個生長過程中沒有明顯的塌陷,仍然滿足機械化收割要求。茼蒿播種時采用與雞毛菜相同的φ5×20窩眼輪,由于受種子形狀差異的影響,未及時調整好毛刷的位置,導致茼蒿播量略低于理論播量,但從生長情況來看,仍然滿足機械化收割的要求,如圖11所示。

圖9 雞毛菜生長情況Fig.9 Growth situation of green vegetable

圖10 菠菜生長情況Fig.10 Growth situation of spinach

圖11 茼蒿生長及收割情況Fig.11 Growth situation of crowndaisy chrysanthemum
為適應上海機械化收割要求,應適當提高播量以增加播種密度;同時為了在播種不同種子時提高鏈輪的通用性,省去更換鏈輪的時間,因此將雞毛菜用的主、從動鏈輪也更換為18∶20,更換后每公頃播量變為32 864 g,滿足雞毛菜播量要求。
田間播種試驗表明,研制的精整作畦聯合播種機具有勞動強度低、作業效率高、播種參數調整方便等特點。以拖拉機慢2檔為例,完成一個長40 m的標準GP-832Z單棚作業時間約為15 min,即作業效率約為0.13 hm2/h,而人工作畦效率為0.017 hm2/h,人工播種效率為0.083 hm2/h,整機作業效率是人工作業的9.2倍。對比傳統的先作畦后播種的機械作業方式,同樣以拖拉機慢2檔的速度作業,不考慮機具的掛接及轉場時間,整機作業效率是傳統方式的2倍。
4 結論
1)本文介紹的蔬菜精整作畦聯合播種機,設計作畦滾筒直徑160 mm,作畦滾筒高度調節范圍為60 mm,設計鎮壓滾筒高度自動調節,調節范圍為69.5 mm,即鎮壓滾筒始終接觸畦面,保證播種的穩定性;設計雞毛菜、茼蒿用窩眼輪φ5×20,菠菜用窩眼輪φ6.5×30,設計主、從動鏈輪齒數為18∶20,在保證不同種子播量的基礎上,省去更換鏈輪的時間,提高了零部件的通用性。
2)通過田間播種試驗發現,機具作業后畦面寬度1 000 mm,高度120 mm。主、從動鏈輪齒數在18∶20時,雞毛菜的播量為32 864 g/hm2,菠菜的播量為63 853 g/hm2,茼蒿的播量為20 015 g/hm2,作業后的畦面質量及播量均滿足后續的機械化收割要求。以拖拉機慢2檔為例,作業效率約為0.13 hm2/h,是人工作業的9.2倍,是傳統先作畦后播種作業方式的2倍。
3)該機具在滿足實際生產作畦、播種要求的同時也存在一些弊端,比如圓盤取土和作畦滾筒功能的實現對旋耕質量和土質要求較高;窩眼輪孔徑較小,長時間作業后容易被雜質、灰塵等堵塞,堵塞后影響充種,導致漏播。后續將進一步優化整機配置,完善作業前的整地、篩種等準備工作,同時加強農機農藝溝通融合,培育適合機械化作業的蔬菜品種,為上海蔬菜生產全程機械化提供適宜的農機裝備。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
