基于動態稱重技術的軸載譜檢測研究
2021-09-14 00:34:44溫肖博
現代交通技術 2021年4期
吳 昊,盧 勇,溫肖博
(蘇交科集團股份有限公司,南京 211112)
我國經濟的蓬勃發展帶來各行各業的欣欣向榮,交通領域高速公路的建設也取得了令人矚目的成就,然而早期公路建設的質量參差不齊,交通的不斷發展、交通荷載的增加以及超載超限車輛的增多導致越來越多的車轍、裂縫等路面病害,導致瀝青路面使用性能下降。因此需要采取措施預防瀝青路面損傷,而軸載譜的準確測定是關鍵部分之一。
過去為控制大型貨車載重量,公路管理人員會在收費站設置稱重秤,在大貨車停車繳費的過程中進行稱重,這種措施在規范使用的前提下精度可以得到保證,但很多貨車司機會采取措施致使稱重值偏小,結果真實性難以得到保障。除此之外,靜止狀態下測量效率低,難以測得單軸重量,存在局限性。歐美國家于20世紀90年代率先進行動態稱重系統的研究,其中以德國PAT公司的動態稱重產品最為著名,我國研究起步較歐美國家稍晚,且研究重點在靜態荷載測量與低速動態荷載測量。目前國內外動態稱重方法主要包括:①參數估計法;②專家系統;③神經網絡法;④ADV(位移速度法);⑤位移積分法[1]。
鑒于國內動態稱重技術仍處于發展階段,本文將通過介紹動態荷載測量技術原理和軸載測定方法,分析其影響因素,并提出測量精度和準確性的改進措施。
1 軸載譜動態測定技術原理
交通荷載檢測對路面結構選用、設計和路用性能分析具有重要意義,當量軸載作用次數(equivalent standard axle load,ESAL)一般依據等破壞與等厚度原則,將道路上作用的多種交通荷載按不同次數轉換為一個能夠反映交通荷載總體水平的標準軸載,然而這種方法難以根據試驗路段數據反映實際道路的結構厚度、結構形式等對交通荷載作用的影響。美國公路合作研究項目(NCHRP)提出采用軸載譜取代當量軸載作用次數。
我國將車輛分為13種類型,其中1~3類車輛的質量較輕,不會對路面結構造成顯著影響。因此,一般考慮4~13類車輛進行軸載檢測。常用車輛分類檢測器包括地感線圈檢測器、基于波頻的車輛檢測器和視頻車輛分類監測技術。趙延慶等[2]將涉及軸載譜的重要參數確定為以下5個:①車輛類型分布系數。考察每種類型車輛的比例。②月調節系數。針對某一月份,分析特定車型的比例。③小時分布系數。考察年平均日交通量在每個小時內的比例。④軸數系數。確定特定車型中特性軸類型的平均軸數。⑤軸載分布系數。對特定車型的軸型,分析其軸重在各個區間內的比例。這5個參數可以描述車輛軸載組成,并用于分析交通荷載對路面的影響。
1.1 原理分析
軸載譜動態測定技術是在車輛行駛過程中動態測量車輛輪胎壓力,將其換算為靜態車輛質量的方法,公路應用的軸載譜動態測量系統是由多個傳感器和數據處理器組成的動態稱重系統,可以測量儀器所在地各時段行駛車輛的動態胎壓,并由其通過時間、車長等參數計算車輛的總質量、車速、軸距等信息,再進行辨析證明所測數據無誤后輸入數據庫中,以實現在不影響車輛行駛的前提下全自動采集車輛數據,最后計算軸載譜。
動態荷載檢測需要將稱重系統在車輛運行過程中檢測得到的動態胎壓換算成車輛的靜態真實質量,其計算方式是對被測對象進行多次測量,根據測得的平均質量結合時間進行計算。測量方法包括質量法、沖量法、體積法、重力法等。
1.1.1 質量法
質量法是通過加速度傳感器和置于地下的壓力傳感器測定車輛的加速度和胎壓,計算其施加給地面的力F和車輛自身的加速度a,進而計算車輛承載的整車質量。 計算公式見式(1)。
(1)
式中,m為整車質量,kg;F為施加給地面的力,N;a為加速度,km/h。
1.1.2 沖量法
沖量法是由兩個不同時刻的車輛速度,以及這段時間內施加的力計算沖量,進而計算整車質量,見式(2)。

(2)
式中,v1為t1時刻的速度,km/h;v2為t2時刻的速度,km/h;F為t時刻的力,N。由于單位時間內的力是根據函數模型得到,所以該計算方法精度較低。
1.1.3 體積法
體積法是已知物料密度,根據CCTV(closed circuit television,閉路電視監控)系統進行圖像測算得到體積數據,推算車輛承載的貨物質量,但由于密度在運輸過程中多變,且體積并不穩定,也不宜測量,所以測量難度較大。
1.1.4 重力法
重力法是采用應變傳感器將車輛駛過時的應變轉化為電信號,對電信號進行處理,按照輪胎的觸地面積和胎壓等數據將應變轉換為重力,從而得到車輛承載的貨物質量。
現階段動態稱重系統常采用重力法。其優點在于原理簡潔、易操作控制,對車輛駛過時的行程時間和力較為敏感。但其也存在缺點,即忽略了一定的環境因素或車輛本身的體積因素等問題,例如汽車自身的振動會與稱重臺形成周期性的諧振。但客觀因素對軸載稱重的影響較小,振動對于應變測量的影響可以通過算法優化將其弱化。因此,重力法仍然適合于動態稱重系統。
軸載譜動態監測需要通過軸型識別技術對車輛荷載進行分類,軸型識別過程可依時序分割為識別多個單軸的軸型,再綜合每個單軸的軸型得出整個車輛的軸型。車輛軸型識別知識庫內容主要包括:系統狀態判斷、軸序數判斷、單雙輪判斷、聯軸判斷、車輛軸型匹配及修正。
通常車輛過秤會產生多個有效稱重段,這些有效稱重段所包含的軸信息部分重復。為解決這一問題,在計算整車總質量和軸載荷時,首先要對這些有效稱重段所包含的軸組配重信息進行識別,然后依照一定規則進行選取,再用于計算。由于每個有效稱重段的重量信息都存在誤差,所以在計算整車質量時應盡可能減小誤差,避免將整車質量分割過多次。軸載譜動態測定技術流程如圖1所示。
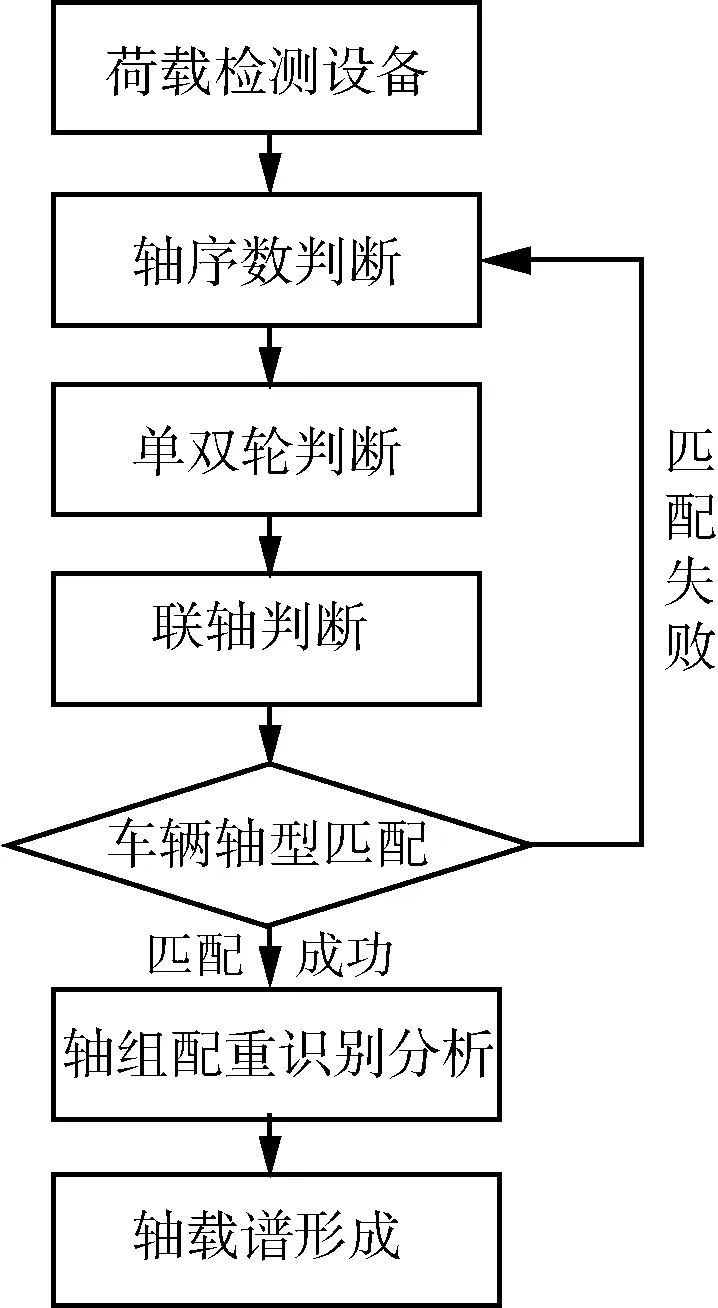
圖1 軸載譜動態測定技術流程
1.2 干擾因素分析
通常情況下軸載譜動態測定系統需結合精確性原則、經濟性原則和可靠性原則進行原材選擇和系統設計。輔助軸載譜動態測定的測量系統對正常的交通和駕駛員駕駛不應產生影響。因此,還應考慮稱重平臺的隱蔽性,防止車輛采用繞道或跨線等方式影響稱重的準確性。同時,稱重系統還應適合長期監測,不應受到天氣的過度影響,以收集某一條公路各時段各季節的軸載,為后續研究提供準確可靠的數據。
相對于靜態測定系統,軸載譜動態測定更符合現在對于軸載測算的要求,但軸載測算也存在缺點,一方面,由于車輛在高等級公路上的行駛速度較快,受到風力、路面質量等影響較大,車輛產生較大振動,會對動態稱重平臺造成影響;另一方面,路面自身出現裂縫、下沉等現象,溫度與濕度變化也會影響稱重系統的測量準確性[3-4]。將干擾因素進行細分,主要分為以下幾點。
(1) 動態測定算法自身的限制。由于動態軸載譜測定需要較強的算法進行數據的快速處理和運算,所以算法本身的限制和系統的運行速度會影響軸載的測定速度,繼而影響測定結果。
(2) 動態稱重系統的影響。車輛駛過動態稱重臺的振蕩;稱重臺固有振動對測量信號的影響;稱重臺受地基沉降影響引起自身測量誤差;路面傾斜、高差等引起稱重臺誤差;外界電磁干擾對數據傳輸質量的影響;隨時間延長稱重臺臺面變形以及傳感器固有的非線性測量引起的誤差。
(3) 測定地點周邊環境的影響。車輛經過路況較好的路段,車輛能夠保持在一定的速度時,更易于軸載譜的動態測定,當出現擁堵等現象時,可能會影響軸載譜測定。
針對上述問題,動態軸載測定盡量使用便于數據調取的系統,如分層式數據庫。另外,動態稱重設備需要采取改進措施,以適應各種公路的稱重要求。首先需要選定動態稱重臺位置,盡量將稱重臺設置在水平直道上,避免路線因素對稱重臺造成影響,必要時可加入平直引道,既排除路線影響,又可起到緩沖作用,減小車輛激振力的影響;其次應保證稱重臺的臺面平整光滑,減小由于稱重臺不平導致的振蕩,為了讓稱重臺在荷載作用時變形不超過限值,并保證其結構具有較高的固有頻率和良好的動態特性,稱重臺一般焊接成箱形結構;最后,保證稱重臺附近環境的穩定性,盡量防止電磁設備等干擾,降低溫度、濕度的影響。
2 動態稱重系統
采用靜態稱重系統可以獲知整車質量,但難以進行軸載譜的測定,軸型分辨、各軸重量測定和動態記錄車輛分類是采用動態稱重系統檢測軸載的難點。鑒于動態稱重系統的發展與應用,基于多傳感器進行車型、軸型等分類具備可行性。
軸載譜動態測定技術中的動態稱重系統包括攝像系統、數據計算系統、超限報警系統、低速稱重系統、高速稱重系統和感應識別系統[5]。PAT公司的daw動態稱重系統平面布置[6]如圖2所示。
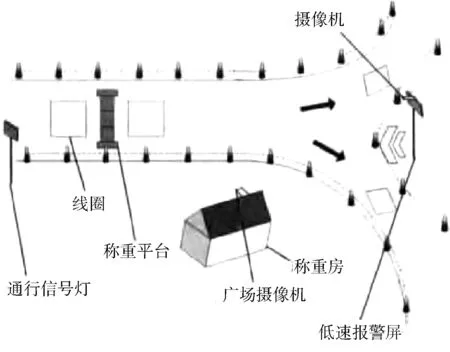
圖2 daw動態稱重系統平面布置
稱重系統通常用于高速公路上對運行中的車輛進行超限控制,具備實時性的優點,主要由以下子系統構成。
1) CCTV系統
CCTV系統可對超限車輛進行實時監控。
2) 高速檢測系統
高速檢測系統對高速運行車輛進行檢測,在對交通不造成干擾的情況下獲取荷載信息,并將檢測信息傳遞到信息指示系統。
3) 低速精確稱重系統
低速精確稱重系統主要用于對公路主線車輛進行低速稱重,確保稱重準確性。
4) 信息指示系統
信息指示系統用于接收檢測系統傳遞的信息,若車輛超限超載,指示系統會發出信號,引導車輛駛離主線,進入專用執法區域接受交通執法檢查。
5) 計算機系統
計算機系統協調各系統的配合,協助工作人員對稱重系統進行控制[3]。
采用重力式方法進行車輛荷載檢測時,多個應變傳感器在經受車輛輪胎應力作用下產生響應,根據提前輸入的車輛分類信息,對應變響應進行分析,由不同車輛應變之間的差異性檢測車輛類型,并將測得的各輛車的軸型、軸重、軸距等信息,按車輛類型記錄。
在得到相關信息后對數據記錄系統產生的應變響應曲線進行分析,四軸車輛應變響應圖[7]如圖3所示。圖3(a)為數據采集記錄系統對傳感器傳遞的信息處理后的曲線,圖3(b)是平滑處理后進行分析的曲線。
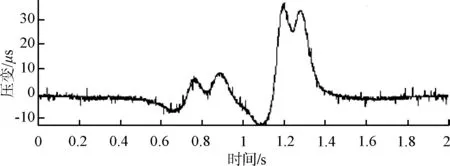
(a) 原始圖像
由圖3(b)可知,圖中4個峰值對應4個車輛軸載,4個不同的應變值表明前2個車軸軸重大于后2個車軸軸重,第一個、第二個車軸與第三個、第四個車軸的峰值距離較遠,結合多個傳感器輸出計算車速,再根據橫軸時間差得到軸距。張文斌[7]研究動態稱重系統中處理多組傳感器檢測到的數據時,采用特征提取、多分類支持向量機分類以及決策融合的方法將不同車輛及時分類。針對動態稱重方法對實時處理的需求,李冰瑩[8]選用DSP(damage per second,秒傷害)處理器作為軸重測量數據處理的核心硬件,便于對所得到的數據進行合理分析,最終可以得到軸載譜。
整車式動態汽車衡是目前常用的動態稱重技術,不但具有軸重秤的動態性能優點,也具有整車式靜態秤準確度高的優勢。整車秤在高速公路收費站的應用,有效遏制了跳秤、沖秤、S形路線、點剎等行為,同時可準確識別超限超載車輛并第一時間限制其繼續行駛,避免路面和橋梁結構遭受破壞,保障道路運輸安全。
高速公路整車秤計重收費系統示意如圖4所示。收費車道設置的車輛識別器、軸組識別器、車輛紅外分離器、地感線圈、稱重顯示控制器等設備聯動工作,經數據采集計算得出每車每軸軸重、每軸輪胎數、軸型、速度、軸數、整車質量,以此將上述信息整合為收費信息數據包,傳輸至收費崗亭的計算機系統作為收費依據,從而實現按質量收費的計重收費功能。

圖4 高速公路整車秤計重收費系統示意
高速公路整車秤計重收費系統工作流程為:車輛分離器識別車輛進入,島頭通行信號燈顯示紅燈,禁止后車跟進稱重臺;輪胎(軸)識別器識別車輛軸進入稱重臺,整車式稱重系統開始稱重,檢測軸重,判定軸組;當車輛通過車輛分離器,完全駛上稱重臺,稱重臺穩定時,自動記錄車貨總質量并修正軸重;稱重系統向車道計算機發送計重信息(軸數、軸組、軸重、車貨總質量等),車道計算機自動判定超限,計算收費金額,進行相關收費操作;收費完畢后,車輛駛出稱重平臺,稱重臺回零,島頭通行信號燈顯示綠燈,指示下一輛車駛入。在此期間,系統可以自動采集符合要求車輛的軸載、軸型、車貨總質量等信息,并經過處理輸入為軸載譜;不符合要求的車輛則需要進行相應處理,處理后重新錄入軸載。
3 軸載譜分析
《公路瀝青路面設計規范》(JTG D50—2017)于2017年9月1日正式實施,該版規范較舊版改變了以車型為基礎的交通量軸載換算方法,以實際動態稱重數據為基礎,規范了軸載譜和交通量參數的調查分析方法。為進一步提升交通軸載參數的獲取精度,本文采用動態稱重測得的軸載數據,對江蘇省高速公路典型軸載譜開展研究。
江蘇省自2003年開始對全省路橋收費站分批實施計重收費,動態稱重設備逐步應用于全省高速路網收費站系統。高速公路計重收費數據分布在入口車道原始記錄表、出口車道原始記錄表和軸重原始數據表。計重收費相關的數據主要包括:車輛到達時間、車輛分類、車軸數量、各軸類型、各軸重量,計重收費實現了對高速公路上行駛車輛軸載信息的翔實記錄。
《江蘇省高速公路軸載譜的調查研究》課題研究對江蘇省內16條高速公路20個斷面的收費站動態稱重樣本信息進行了統計研究,其車型、軸型分類標準參考美國國家公路與運輸協會(AASHTO)標準要求,與《公路瀝青路面設計規范》(JTG D50—2017)分類要求一致。結合該課題研究成果,研究分析江蘇省高速公路軸載譜時間、空間分布發展規律。
3.1 軸載譜時間發展規律
以廣靖錫澄高速公路樣本數據為例,統計2004—2006年和2016—2017年兩個年限區間單軸雙輪軸載分布,廣靖錫澄高速公路單軸雙輪軸載分布如圖5所示。
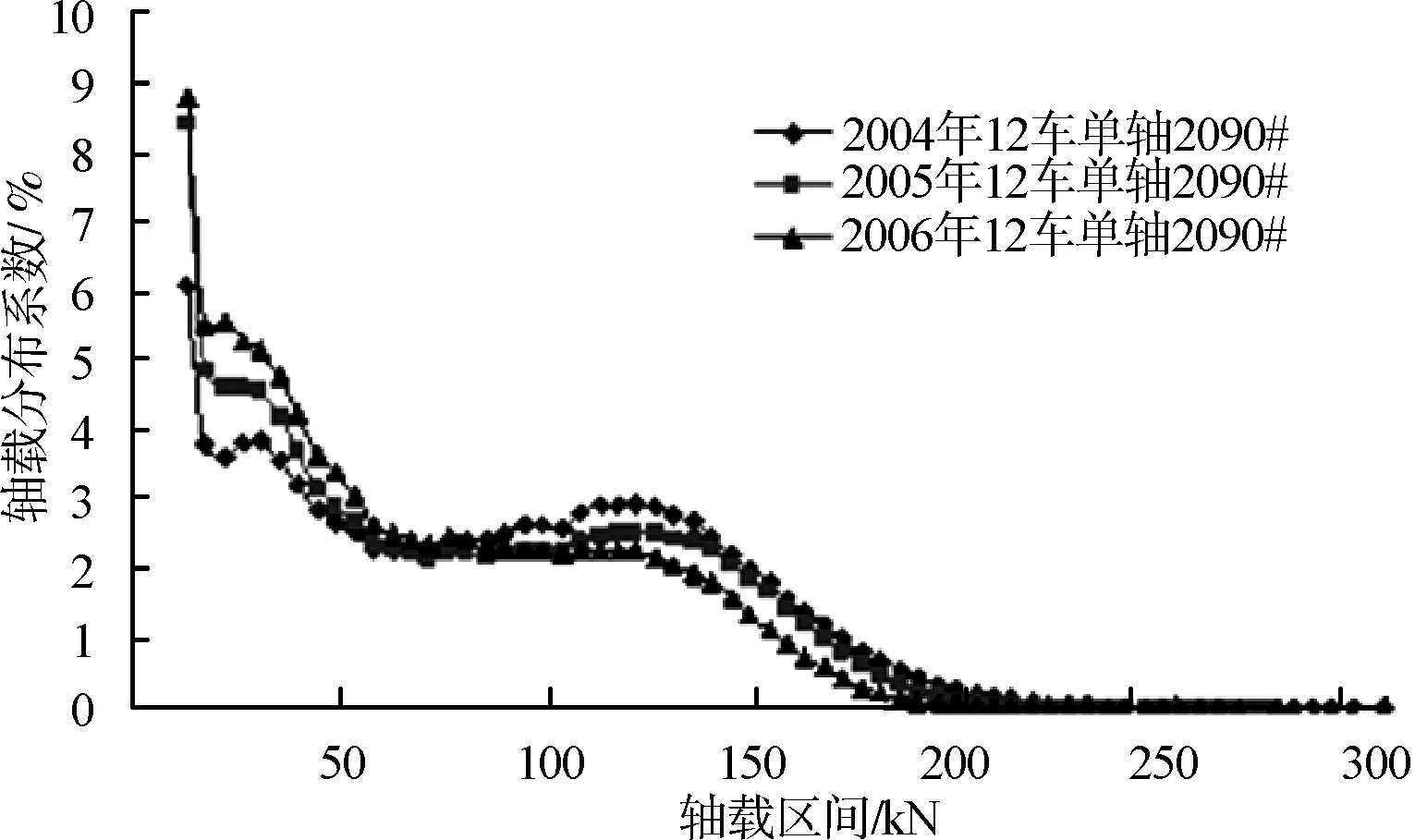
(a) 2004—2006年
由圖5可知,2004—2006年和2016—2017年,廣靖錫澄高速公路單軸雙輪軸載均呈現雙峰分布,且峰值區間保持一致。其中,2016—2017年第一峰值的軸重區間為4~6 t,第二峰值的軸重區間為12~14 t。
整體來看,近年來單軸雙輪軸載分布基本保持一致,單軸雙輪軸載超載率統計如表1所示。
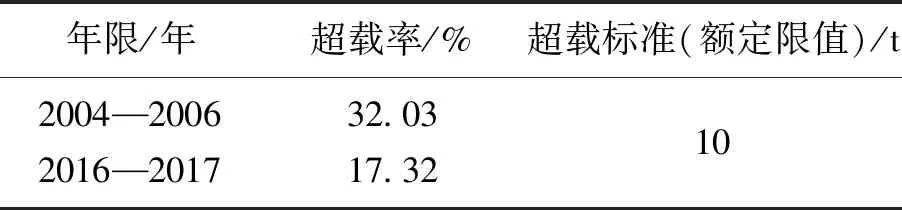
表1 單軸雙輪軸載超載率統計
由表1可知,江蘇省高速公路治超成果較顯著,單軸雙輪軸載超載率由2004—2006年的32.03%降至2016—2017年的17.32%,降低了45.93%。
以廣靖錫澄高速公路樣本數據為例,統計2004—2006年和2016—2017年兩個年限區間雙聯軸雙輪軸載分布系數,廣靖錫澄高速公路雙聯軸雙輪軸載分布如圖6所示。
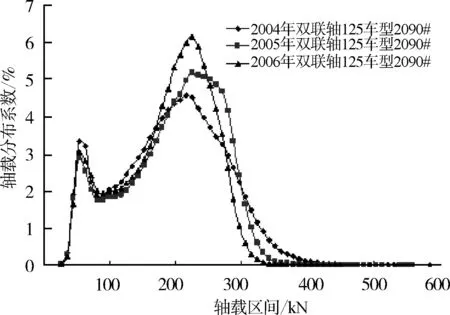
(a) 2004—2006年
由圖6可知,2004—2006年和2016—2017年,廣靖錫澄高速公路雙聯軸雙輪軸載均呈現雙峰分布,第一峰值軸重區間保持一致,均為6~8 t,第二峰值軸重區間由2004—2006年的16~18 t增至2016—2017年的20~22 t。
整體來看,近年來雙聯軸雙輪軸載的第二峰值區間有所后移,但是重載的分布比例卻呈現顯著下降趨勢,雙聯軸雙輪軸載超載率統計如表2所示。
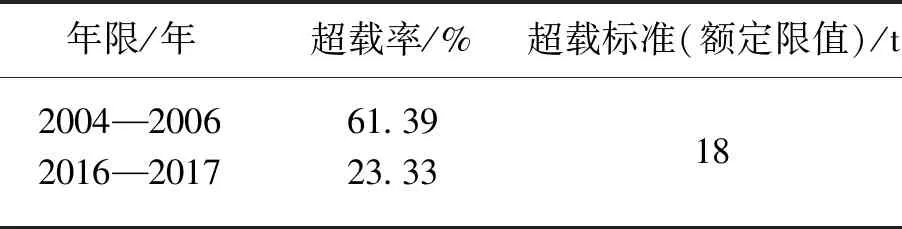
表2 雙聯軸雙輪軸載超載率統計
由表2可知,江蘇省高速公路治超成果顯著,雙聯軸雙輪超載率由2004—2006年的61.39%降至2016—2017年的23.33%,降低了62.00%。
3.2 軸載譜空間發展規律
根據上述分析和2007年《江蘇省高速公路軸載譜的調查研究》相關數據,相同時期內,軸載譜的空間分布規律基本一致,江蘇省高速公路治理貨車超載問題成果顯著。現針對2016—2017年,江南(滬寧高速公路、廣靖錫澄高速公路)、江北(寧宿徐高速公路、連徐高速公路)4條典型高速公路的軸載譜空間分布規律進行統計分析。
4條高速公路單軸雙輪軸重空間分布如圖7所示。
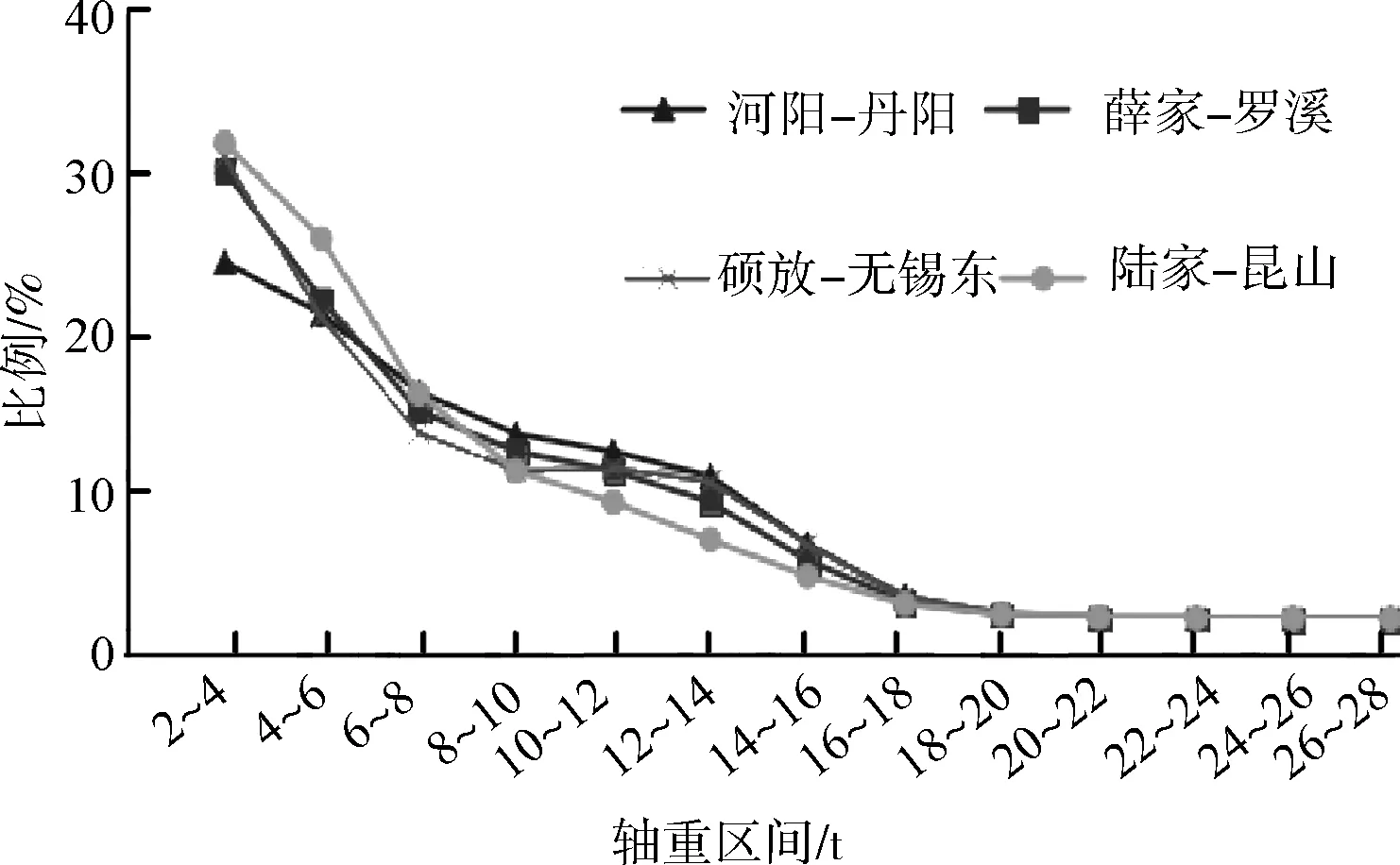
(a) 滬寧高速公路
由圖7可知,4條高速公路的單軸雙輪軸重均呈雙峰分布,且峰值區間保持一致,第一峰值的軸重區間為4~6 t,第二峰值軸重區間為12~14 t。以同軸型軸重分布情況來看,區域(江南、江北)和交通量等級(特重、中)因素對軸重的分布影響并不顯著,即同時期內,江蘇省高速公路路網的單軸雙輪軸載空間分布較穩定。
4條高速公路雙聯軸雙輪軸重空間分布如圖8所示。
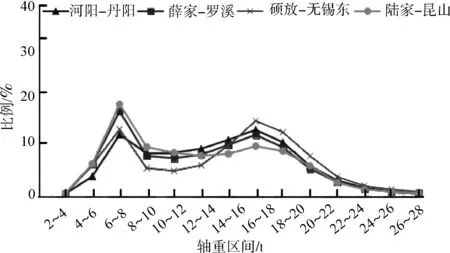
(a) 滬寧高速公路
由圖8可知,4條高速公路雙聯軸雙輪軸重空間均呈雙峰分布,且峰值區間保持一致,第一峰值的軸重區間為6~8 t,第二峰值的軸重區間為16~18 t。與單軸雙輪軸重分布結果相比,區域和交通量等級因素對雙聯軸軸重空間分布的影響并不顯著,同時期內,江蘇省高速公路路網雙聯軸雙輪軸載空間分布較穩定。
4條高速公路三聯軸雙輪軸重空間分布如圖9所示。
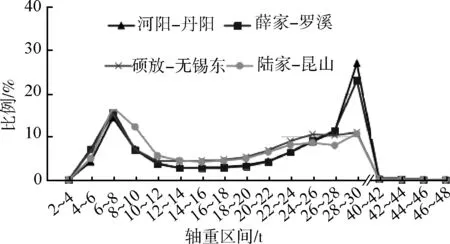
(a) 滬寧高速公路
由圖9可知,4條高速公路三聯軸雙輪軸重空間均呈雙峰分布,且峰值區間保持一致,第一峰值的軸重區間為6~8 t,第二峰值的軸重區間為26~28 t。與單軸、雙聯軸軸重空間分布相比,區域和交通量等級因素對三聯軸雙輪軸重空間分布的影響并不顯著,同時期內,江蘇省高速公路路網三聯軸雙輪軸載空間分布較穩定。
綜上,通過對同一高速公路不同時間段不同軸型研究發現,現階段江蘇省高速公路路網貨車超限超載治理成效顯著,超載分布比例較早期下降顯著,有利于保證公路使用年限內的路用性能;在同時期內,以4條高速公路的主要軸型數據為例進行分析,可知其軸載空間分布較為穩定,各條高速公路間數據無明顯差異,可以認為省級軸載譜的統計合理可行。
4 總結
動態稱重系統相較于靜態稱重系統具有更好的實時性和更高的精確性,應用多種傳感器系統與可人工操作界面集成,形成數據自動采集系統。動態稱重系統由于電路集成較多,容易損壞,需要考慮車輛行駛過程中產生的振蕩和其他因素對傳感器測量準確性的影響。動態稱重系統可以利用多傳感器采集到的數據進行分析,根據車輛行駛速度、通過時間、傳感器測得應變等得到軸載數量、車輛類型、各軸軸重和軸間距等數據,從而建立軸載譜得到軸載譜參數以評估路用性能。
通過研究江蘇省動態測量軸載譜發現,同一時期不同高速公路軸載分布在省際范圍內基本一致,同一高速公路在不同時期內的軸載空間分布有所不同,但主要軸載的曲線趨勢和峰值對應軸型基本一致。因此,江蘇省內軸載譜研究具有參考價值。
目前動態稱重系統已經應用于江蘇省內收費站,并應用于軸載檢測,但其設置未遍及全省各條公路。因此,無法對高速公路以外公路進行軸載測定。同時本文研究軸載集中于江蘇省,其他地區可能會由于地形等因素出現軸載差異,軸載研究結論無法應用于其他地區,各省區市還需因地制宜進一步研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2021年20期)2021-11-20 05:43:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國交通信息化(2016年9期)2016-06-06 07:42:10
小說月刊(2014年4期)2014-04-23 08:52:20