基于RBF神經(jīng)網(wǎng)絡(luò)的滾仰式導(dǎo)引頭自適應(yīng)滑模變結(jié)構(gòu)控制
2021-09-14 02:32:16姚亞鵬
河南科技 2021年11期
姚亞鵬
摘 要:滾仰式導(dǎo)引頭系統(tǒng)具有非線性和不確定性。本文結(jié)合導(dǎo)引頭穩(wěn)定平臺(tái)的機(jī)械結(jié)構(gòu)特性,通過坐標(biāo)系變換對(duì)其運(yùn)動(dòng)學(xué)特性進(jìn)行分析,基于歐拉動(dòng)力學(xué)原理建立了平臺(tái)的動(dòng)力學(xué)模型,同時(shí)考慮到工程應(yīng)用中建模不確定性和摩擦力矩、電機(jī)力矩、耦合力矩、干擾力矩等多種非線性因素對(duì)系統(tǒng)性能的影響,提出了一種基于RBF(徑向基)神經(jīng)網(wǎng)絡(luò)的滑模變結(jié)構(gòu)控制器設(shè)計(jì)方案。仿真結(jié)果表明,采用神經(jīng)網(wǎng)絡(luò)可實(shí)現(xiàn)模型中未知部分的自適應(yīng)逼近,調(diào)節(jié)自適應(yīng)權(quán)重可保證整個(gè)系統(tǒng)的穩(wěn)定性和收斂性,有效抵抗干擾等非線性因素的影響。
關(guān)鍵詞:滾仰式導(dǎo)引頭;建模;滑模控制;神經(jīng)網(wǎng)絡(luò)
中圖分類號(hào):TP242文獻(xiàn)標(biāo)識(shí)碼:A文章編號(hào):1003-5168(2021)11-0011-03
Adaptive Sliding Mode Variable Structure Control of Roll-pitch
Seeker Based on RBF Neural Network
YAO Yapeng
(China Airborne Missile Academy,Luoyang Henan 471009)
Abstract: The roll-pitch seeker system has nonlinearity and uncertainty. In this paper, combined with the mechanical structure characteristics of the seeker stabilized platform, its kinematics characteristics were analyzed through coordinate system transformation, and a dynamic model of the platform was established based on the Euler dynamics principle, at the same time, considering the uncertainty of modeling in engineering applications and the influence of various non-linear factors such as friction torque, motor torque, coupling torque, and disturbance torque on the system performance, a design scheme of sliding mode variable structure controller based on RBF (radial basis function) neural network was proposed. The simulation results show that the use of neural network can realize the adaptive approximation of the unknown part of the model, and adjusting the adaptive weight can ensure the stability and convergence of the entire system, and effectively resist the influence of non-linear factors such as interference.
Keywords: roll-pitch seeker;modeling;sliding mode control;neural network
以往沖突和空戰(zhàn)分析結(jié)果表明,空戰(zhàn)遭遇中是否配有高性能的近距空空導(dǎo)彈直接關(guān)系到近距空戰(zhàn)主動(dòng)權(quán)的奪取[1],近距格斗空空導(dǎo)彈在空戰(zhàn)中的重要性不言而喻。現(xiàn)代空戰(zhàn)要求新一代近距格斗空空導(dǎo)彈具備更高的機(jī)動(dòng)性和大離軸角發(fā)射能力,要求導(dǎo)引頭視場(chǎng)大、體積小、重量輕等。大離軸角發(fā)射要求導(dǎo)引頭具有較大的視場(chǎng),以便進(jìn)行目標(biāo)探測(cè),滾仰式導(dǎo)引頭可實(shí)現(xiàn)前半球全向攻擊[2-5],是當(dāng)前近距格斗空空導(dǎo)彈的首要選擇。
在導(dǎo)彈飛行過程中,受彈體擾動(dòng)和溫度、氣壓、震動(dòng)等不確定因素的影響,滾仰式導(dǎo)引頭穩(wěn)定平臺(tái)系統(tǒng)的某些結(jié)構(gòu)參數(shù)會(huì)發(fā)生變化,繼而影響系統(tǒng)穩(wěn)定性。滑模變結(jié)構(gòu)控制作為變結(jié)構(gòu)控制系統(tǒng)的一種控制策略,可迫使系統(tǒng)在一定特性下沿規(guī)定的狀態(tài)軌跡做小幅度、高頻率的上下運(yùn)動(dòng)(滑動(dòng)模態(tài))。滑動(dòng)模態(tài)可以進(jìn)行設(shè)計(jì)且與系統(tǒng)參數(shù)及擾動(dòng)無關(guān),因此,其具有快速響應(yīng)、對(duì)應(yīng)參數(shù)變化及擾動(dòng)不靈敏、無須系統(tǒng)在線辨識(shí)、物理實(shí)現(xiàn)簡(jiǎn)單等優(yōu)點(diǎn)。本文結(jié)合滑模控制和神經(jīng)網(wǎng)絡(luò)逼近進(jìn)行滾仰式導(dǎo)引頭非線性系統(tǒng)的設(shè)計(jì),采用神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)模型中未知部分的自適應(yīng)逼近,有效降低模糊增益。同時(shí),使用李雅普諾夫方法導(dǎo)出神經(jīng)網(wǎng)絡(luò)自適應(yīng)率,通過調(diào)節(jié)自適應(yīng)權(quán)重來保證整個(gè)閉環(huán)系統(tǒng)的穩(wěn)定性和收斂性。
1 滾仰式導(dǎo)引頭穩(wěn)定跟蹤原理
1.1 坐標(biāo)系定義
滾仰式導(dǎo)引頭采用滾轉(zhuǎn)外框架、俯仰內(nèi)框架結(jié)構(gòu),在研究導(dǎo)引頭運(yùn)動(dòng)時(shí),人們需要定義如下坐標(biāo)系:彈體坐標(biāo)系[OXmYmZm]、外框架坐標(biāo)系[OXoYoZo]、內(nèi)框架坐標(biāo)系[OXiYiZi](導(dǎo)引頭坐標(biāo)系[OXaYaZa])和目標(biāo)視線坐標(biāo)系[OXsYsZs]。彈體坐標(biāo)系繞[OXm]軸轉(zhuǎn)動(dòng)[γs]至外框架坐標(biāo)系,再繞[OZo]軸轉(zhuǎn)動(dòng)[θs]與導(dǎo)引頭坐標(biāo)系重合。導(dǎo)引頭坐標(biāo)系繞[OYi]軸轉(zhuǎn)動(dòng)[εy],再繞[OZs]軸轉(zhuǎn)動(dòng)[εz]與目標(biāo)視線坐標(biāo)系重合。坐標(biāo)系轉(zhuǎn)換示意圖如圖1所示。
1.2 運(yùn)動(dòng)學(xué)分析
設(shè)彈體相對(duì)慣性空間的角速度[wm=wmx,wmy,wmzT],外框架相對(duì)彈體坐標(biāo)系的角速度[wor=γs,0,0T],外框架相對(duì)慣性參照系的角速度[wo=wox,woy,wozT],可以根據(jù)坐標(biāo)系變換公式求出[wo]。
[wo=wmx+γswmycosγs+wmzsinγs-wmysinγs+wmzcosγs] ? ? ? ? ? ? ? ? ? ?(1)
內(nèi)框架相對(duì)外框架的角速度[wir=0,0,θsT],內(nèi)框架相對(duì)慣性參照系的角速度[wi=wix,wiy,wizT]。
內(nèi)框架角速度由彈體運(yùn)動(dòng)耦合的角速度和框架相對(duì)角速度兩部分組成。當(dāng)彈體擾動(dòng)時(shí),擾動(dòng)通過框架間的耦合傳遞給內(nèi)框架,引起光軸晃動(dòng)而影響對(duì)目標(biāo)的精確跟蹤。為了隔離彈體擾動(dòng)使導(dǎo)引頭光軸指向穩(wěn)定,令[wiy]和[wiz]均為0,人們可以得到光軸穩(wěn)定時(shí)需要給內(nèi)外框架施加的角速度控制量。
1.3 跟蹤控制信號(hào)
安裝于導(dǎo)引頭上的探測(cè)器與內(nèi)框架固聯(lián)[6-7],探測(cè)器坐標(biāo)系與內(nèi)框架坐標(biāo)系一致,探測(cè)器可測(cè)得目標(biāo)在導(dǎo)引頭坐標(biāo)系中的俯仰角誤差和偏航角誤差。根據(jù)探測(cè)器測(cè)得的角誤差,可以進(jìn)一步解算并得到內(nèi)外框架角誤差,形成穩(wěn)定跟蹤指令來驅(qū)動(dòng)電機(jī),使得導(dǎo)引頭跟蹤到目標(biāo)。
1.4 動(dòng)力學(xué)建模
根據(jù)平臺(tái)內(nèi)外框架角的變化與作用在其上的外力矩之間的關(guān)系,可對(duì)其進(jìn)行動(dòng)力學(xué)建模分析,將內(nèi)外兩框架作為剛體,結(jié)合歐拉動(dòng)力學(xué)原理,分別列寫各剛體動(dòng)力學(xué)方程。剛體繞質(zhì)點(diǎn)運(yùn)動(dòng)的動(dòng)力學(xué)方程基本表達(dá)式為:
[∑M=H+Ω×Jw=Jw+w×Jw] ? ? ? ? ? ?(2)
式中:[∑M]為內(nèi)框或外框的合力矩;[H]為內(nèi)框或外框角動(dòng)量;[J]為內(nèi)框或外框的轉(zhuǎn)動(dòng)慣量矩陣,假定框架轉(zhuǎn)動(dòng)慣量分布在慣量主軸上,可得轉(zhuǎn)動(dòng)慣量陣[J=diag(Jx,Jy,Jz)]。
由于內(nèi)框架只在俯仰軸[Zi]軸具有轉(zhuǎn)動(dòng)自由度且內(nèi)框架只有[Zi]軸方向的力矩電機(jī)驅(qū)動(dòng)作用,因此只考慮內(nèi)框架在[Zi]軸方向的動(dòng)力學(xué)模型,同理,外框架只在滾轉(zhuǎn)軸[Xo]軸具有自由度且外框架只有[Xo]軸方向的力矩電機(jī)驅(qū)動(dòng)作用。
下面以內(nèi)框架為例進(jìn)行分析,內(nèi)框架在[X]軸上的合力矩表達(dá)式為:
[∑Miz=Maz-Mmubi-Mfi-MCRi-kfiθs-kCRiθs] ? ? ?(3)
式中:[Maz]為內(nèi)框電機(jī)驅(qū)動(dòng)力矩;[Mmubi]為內(nèi)框質(zhì)量不平衡力矩;[Mfi]為黏滯摩擦力矩;[MCRi]為線纜柔性干擾力矩;[kfi]為內(nèi)框摩擦系數(shù);[kCRi]為線纜柔性系數(shù)。
根據(jù)推導(dǎo),內(nèi)外框動(dòng)力學(xué)模型可以表示為:
[A(θ)θ+B(θ,θ)θ+C(θ)+F(θ)+Md=M] ? ? ? ? ?(4)
式中:[A]為2×2階正定慣性矩陣;[B]為2×2階慣性矩陣;[C]為2×1階慣性向量;[F]為摩擦力;[Md]為未知附加干擾;[M]為控制輸入。
2 基于RBF網(wǎng)絡(luò)的自適應(yīng)滑模控制
2.1 滑模控制
根據(jù)動(dòng)力學(xué)方程,跟蹤誤差記為:
[e(t)=θd(t)-θ(t)] ? ? ? ? ? ? ? ? ? ? ? ? ? (5)
定義滑模函數(shù)為[r=e+Λe],將動(dòng)力學(xué)方程代入,可得:
[Ar=Aθd+Λe-Br+Bθd+Λe+C+F+Md-M=f-Br+Md-M] (6)
在工程實(shí)際應(yīng)用中,模型不確定項(xiàng)[f]為未知,需要對(duì)不確定項(xiàng)[f]進(jìn)行逼近。
2.2 RBF神經(jīng)網(wǎng)絡(luò)滑模控制
RBF神經(jīng)網(wǎng)絡(luò)具有萬能逼近的特性,采用RBF神經(jīng)網(wǎng)絡(luò)可對(duì)不確定部分進(jìn)行自適應(yīng)逼近[8]。RBF神經(jīng)網(wǎng)絡(luò)輸入與輸出算法為:
[hj=exp-x-cj22b2jj=1,2,...,n] ? ? ? ? (7)
[f=WThx+ε] ? ? ? ? ? ? ? ? ? ? ?(8)
式中:[h]為高斯基函數(shù);[x]為網(wǎng)絡(luò)輸入;[cj=[c1j,c2j,...,cmj]T]且[m]為網(wǎng)絡(luò)輸入層的個(gè)數(shù);[n]為網(wǎng)絡(luò)隱含層的個(gè)數(shù);[W]為網(wǎng)絡(luò)的理想權(quán)值;[ε]為理想神經(jīng)網(wǎng)絡(luò)逼近[f]的誤差。
采用RBF神經(jīng)網(wǎng)絡(luò)逼近[f],根據(jù)[f(x)]的表達(dá)式,網(wǎng)絡(luò)輸入取[x=[eeqdqdqd]T]。網(wǎng)絡(luò)輸出記為:
[f=Wh(x)] ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(9)
式中,[W]為RBF網(wǎng)絡(luò)估計(jì)權(quán)值。
設(shè)計(jì)控制律為:
[M=f+Kvr-v] ? ? ? ? ? ? ? ? ? ? ? ?(10)
式中,[v]用于克服網(wǎng)絡(luò)逼近誤差[ε]和[Md]的魯棒項(xiàng),其表達(dá)式為:
[v=-(εN+bd)×sign(r)] ? ? ? ? ? ? ? ? (11)
神經(jīng)網(wǎng)絡(luò)自適應(yīng)律取
[W=FhrT] ? ? ? ? ? ? ? ? ? ? ? ? ?(12)
定義李雅普諾夫函數(shù)為:
[L=12rTAr+12tr(WTF-1W)] ? ? ? ? ? ? ?(13)
對(duì)式(13)進(jìn)行求導(dǎo),有
[L=rTAr+12rTAr+tr(WTF-1W)] ? ? ? ?(14)
由于
[rT(ε+Md+v)=rT(ε+Md)+rTv=rT(ε+Md)-r(εN+bd)≤0] ? ? ? ? ? (15)
則有
[L=-rTKvr+rT(ε+Md+v)≤-rTKvr≤0] ? ? ? ?(16)
當(dāng)[L]=0時(shí),[r]=0,根據(jù)Lasalle不變性定理,閉環(huán)系統(tǒng)漸近穩(wěn)定,[t]趨于無窮時(shí),[r]趨于0,繼而誤差[e]趨于0。
3 仿真分析
結(jié)合上述分析,本研究在MATLAB/Simulink環(huán)境下搭建仿真模型,在仿真中考慮建模誤差和干擾誤差等對(duì)系統(tǒng)性能的影響,以驗(yàn)證本文所提方法的有效性。
某滾仰式導(dǎo)引頭樣機(jī)平臺(tái)的數(shù)據(jù)參數(shù)如下:內(nèi)框轉(zhuǎn)動(dòng)慣量[Ji]為0.049 (N·m·s2)/rad,外框轉(zhuǎn)動(dòng)慣量[Jo]為0.294 (N·m·s2)/rad,摩擦系數(shù)和柔性系數(shù)的數(shù)值為0.008。
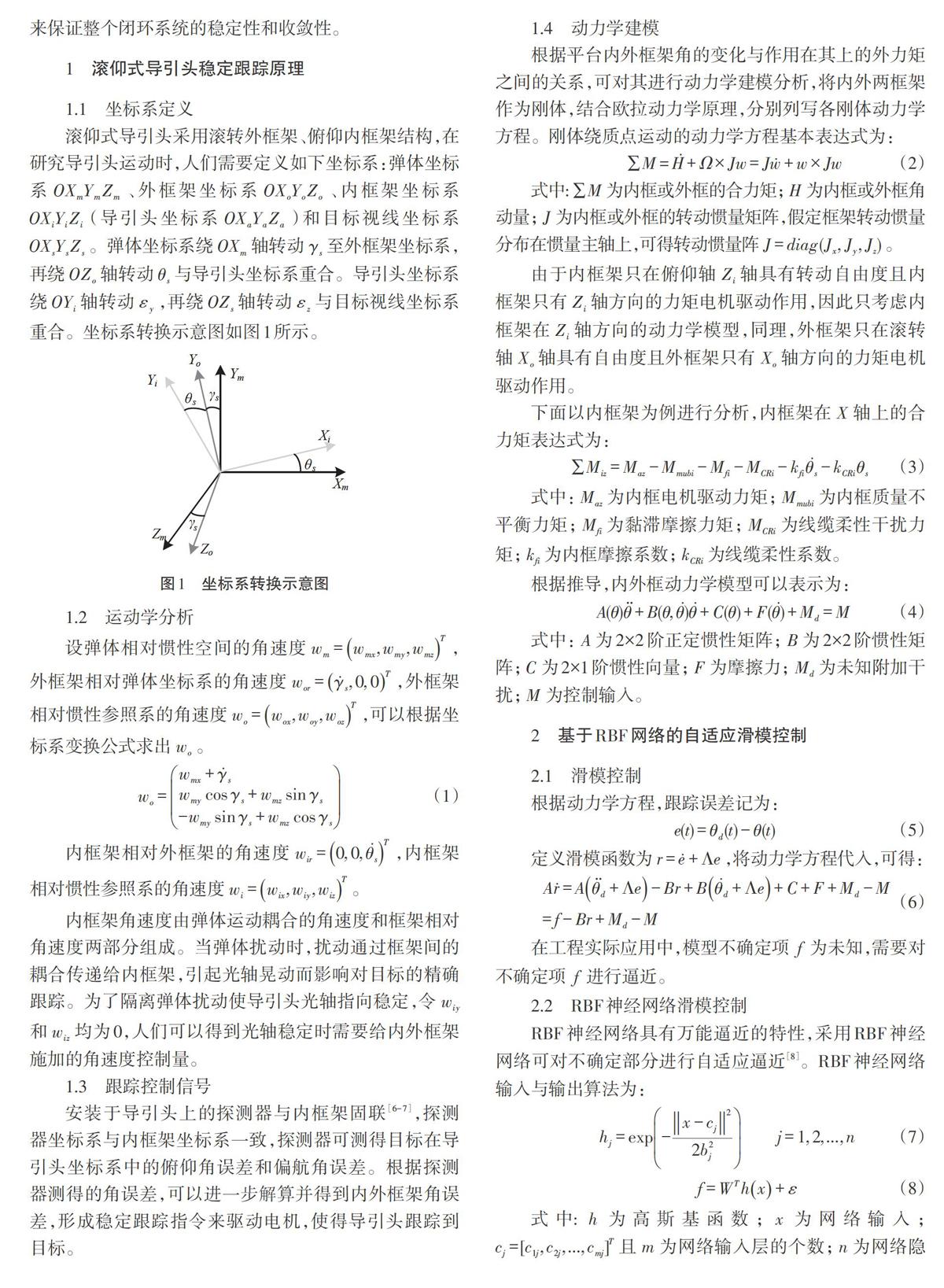
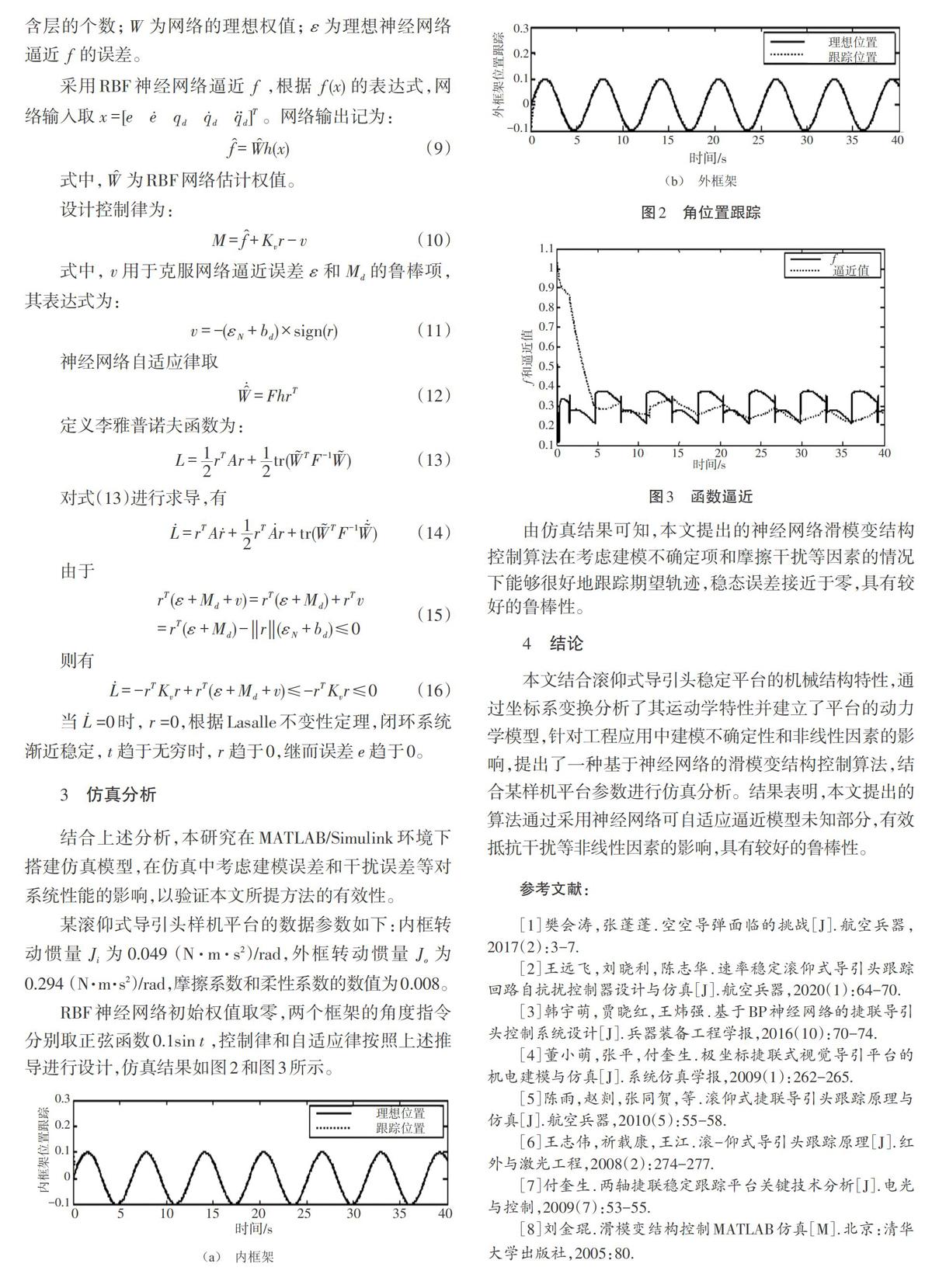
RBF神經(jīng)網(wǎng)絡(luò)初始權(quán)值取零,兩個(gè)框架的角度指令分別取正弦函數(shù)0.1sin[t],控制律和自適應(yīng)律按照上述推導(dǎo)進(jìn)行設(shè)計(jì),仿真結(jié)果如圖2和圖3所示。
由仿真結(jié)果可知,本文提出的神經(jīng)網(wǎng)絡(luò)滑模變結(jié)構(gòu)控制算法在考慮建模不確定項(xiàng)和摩擦干擾等因素的情況下能夠很好地跟蹤期望軌跡,穩(wěn)態(tài)誤差接近于零,具有較好的魯棒性。
4 結(jié)論
本文結(jié)合滾仰式導(dǎo)引頭穩(wěn)定平臺(tái)的機(jī)械結(jié)構(gòu)特性,通過坐標(biāo)系變換分析了其運(yùn)動(dòng)學(xué)特性并建立了平臺(tái)的動(dòng)力學(xué)模型,針對(duì)工程應(yīng)用中建模不確定性和非線性因素的影響,提出了一種基于神經(jīng)網(wǎng)絡(luò)的滑模變結(jié)構(gòu)控制算法,結(jié)合某樣機(jī)平臺(tái)參數(shù)進(jìn)行仿真分析。結(jié)果表明,本文提出的算法通過采用神經(jīng)網(wǎng)絡(luò)可自適應(yīng)逼近模型未知部分,有效抵抗干擾等非線性因素的影響,具有較好的魯棒性。
參考文獻(xiàn):
[1]樊會(huì)濤,張蓬蓬.空空導(dǎo)彈面臨的挑戰(zhàn)[J].航空兵器,2017(2):3-7.
[2]王遠(yuǎn)飛,劉曉利,陳志華.速率穩(wěn)定滾仰式導(dǎo)引頭跟蹤回路自抗擾控制器設(shè)計(jì)與仿真[J].航空兵器,2020(1):64-70.
[3]韓宇萌,賈曉紅,王煒強(qiáng).基于BP神經(jīng)網(wǎng)絡(luò)的捷聯(lián)導(dǎo)引頭控制系統(tǒng)設(shè)計(jì)[J].兵器裝備工程學(xué)報(bào),2016(10):70-74.
[4]董小萌,張平,付奎生.極坐標(biāo)捷聯(lián)式視覺導(dǎo)引平臺(tái)的機(jī)電建模與仿真[J].系統(tǒng)仿真學(xué)報(bào),2009(1):262-265.
[5]陳雨,趙剡,張同賀,等.滾仰式捷聯(lián)導(dǎo)引頭跟蹤原理與仿真[J].航空兵器,2010(5):55-58.
[6]王志偉,祈載康,王江.滾-仰式導(dǎo)引頭跟蹤原理[J].紅外與激光工程,2008(2):274-277.
[7]付奎生.兩軸捷聯(lián)穩(wěn)定跟蹤平臺(tái)關(guān)鍵技術(shù)分析[J].電光與控制,2009(7):53-55.
[8]劉金琨.滑模變結(jié)構(gòu)控制MATLAB仿真[M].北京:清華大學(xué)出版社,2005:80.