一種分布式智能交通信號(hào)燈管理系統(tǒng)設(shè)計(jì)
2021-09-14 04:46:42王振寧馬慧穎李豪杰鄭豪杰
河南科技 2021年11期
王振寧 馬慧穎 李豪杰 鄭豪杰

摘 要:隨著各地交通擁堵問(wèn)題日益嚴(yán)重,傳統(tǒng)的交通控制系統(tǒng)已不能滿(mǎn)足要求,智能交通控制系統(tǒng)應(yīng)運(yùn)而生。本文提出了一種分布式智能交通控制系統(tǒng),介紹了分布式智能交通控制系統(tǒng)的工作原理和具體實(shí)現(xiàn)方法。該系統(tǒng)能結(jié)合實(shí)時(shí)車(chē)流信息、歷史車(chē)流信息、相鄰路口車(chē)流信息、擁堵車(chē)輛閾值,實(shí)時(shí)調(diào)節(jié)交通信號(hào)燈放行時(shí)間,減少車(chē)輛等待時(shí)間,避免車(chē)輛發(fā)生擁堵。
關(guān)鍵詞:車(chē)流量;分布式系統(tǒng);智能交通控制系統(tǒng)
中圖分類(lèi)號(hào):U491.51;TP273文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1003-5168(2021)11-0111-03
Design of a Distributed Intelligent Traffic Signal Management System
WANG Zhenning1 MA Huiying1 LI Haojie1 ZHENG Haojie2
(1.School of Mechanical and Power Engineering, Zhengzhou University,Zhengzhou Henan 450001;2.School of Information Engineering, Zhengzhou University,Zhengzhou Henan 450001)
Abstract: With the increasingly serious traffic congestion problem, the traditional traffic control system can not meet the requirements, intelligent traffic control system came into being. This paper presented a distributed intelligent traffic control system, and introduced the working principle and specific implementation method of the distributed intelligent traffic control system. The system can combine real-time traffic flow information, historical traffic flow information, adjacent intersection traffic flow information and congestion vehicle threshold to adjust the traffic signal release time in real time, reduce vehicle waiting time and avoid vehicle congestion.
Keywords: traffic volume;distributed system;intelligence traffic control system
目前,城市道路車(chē)輛越來(lái)越多,一系列交通問(wèn)題也隨之出現(xiàn)。傳統(tǒng)交通控制系統(tǒng)采用固定的配時(shí)方案,在路口設(shè)置紅綠燈,紅綠燈開(kāi)啟時(shí)間固定設(shè)置。在路上車(chē)流量極少的情況下,這種控制方式能對(duì)路口交通狀況進(jìn)行有效管控。但是,隨著社會(huì)車(chē)輛的增加,城市道路上的車(chē)輛明顯增多,而傳統(tǒng)交通控制系統(tǒng)難以有效疏通交通,導(dǎo)致城市主干道車(chē)輛積壓,通行不暢,從而造成道路擁堵,更有甚者,還會(huì)導(dǎo)致車(chē)輛刮擦等交通事故增多、汽車(chē)尾氣排放增多等[1]。這時(shí),采取緩解交通擁堵的控制手段便尤為必要。
智能交通控制系統(tǒng)區(qū)別于傳統(tǒng)的交通控制系統(tǒng)。智能交通控制系統(tǒng)能根據(jù)路口車(chē)流的實(shí)際情況,實(shí)時(shí)調(diào)整信號(hào)燈的放行時(shí)間,在一定程度上緩解交通擁堵的現(xiàn)象。國(guó)內(nèi)外的智能交通控制系統(tǒng)可分為兩大類(lèi):集中式智能交通控制系統(tǒng)和分布式智能交通控制系統(tǒng)。國(guó)外具有代表性的集中式智能交通控制系統(tǒng)有英國(guó)的SCOOT、西班牙的ITACA等,分布式智能交通控制系統(tǒng)有澳大利亞的SCATS。國(guó)內(nèi)關(guān)于交通控制領(lǐng)域的研究在信號(hào)控制仿真、自適應(yīng)控制建模等方面都有一定的進(jìn)展,但多數(shù)研究是局部的,關(guān)于實(shí)際應(yīng)用交通控制的研究較少[2]。本文設(shè)計(jì)了一種分布式智能交通信號(hào)燈管理系統(tǒng),以緩解交通壓力,合理調(diào)度車(chē)流量。
1 分布式智能交通信號(hào)燈管理系統(tǒng)設(shè)計(jì)
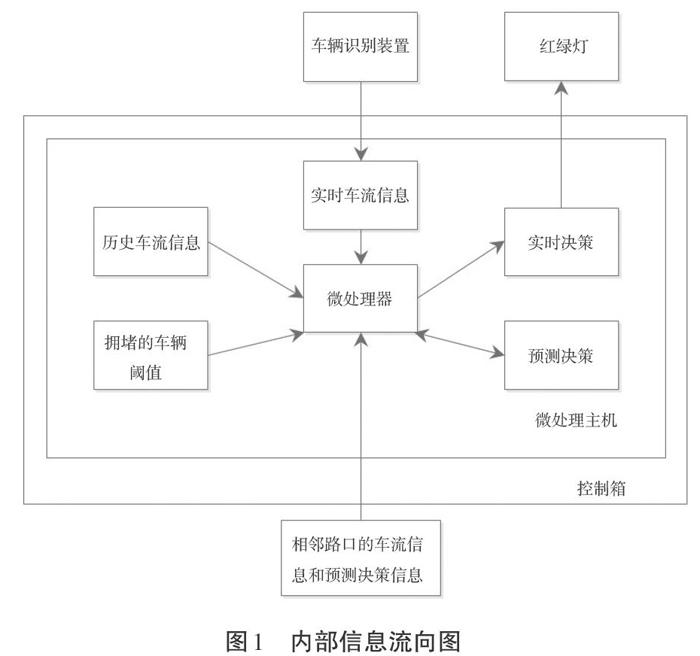
分布式智能交通信號(hào)燈管理系統(tǒng)在每個(gè)路口設(shè)置有獨(dú)立的控制系統(tǒng),包括一個(gè)控制箱、路口停車(chē)線(xiàn)前方的紅綠燈和停車(chē)線(xiàn)后方的車(chē)輛識(shí)別裝置。控制箱連接路口停車(chē)線(xiàn)前方的紅綠燈和停車(chē)線(xiàn)后方的車(chē)輛識(shí)別裝置,并與相鄰路口的控制箱相連接。控制箱內(nèi)設(shè)置有微控制主機(jī)。分布式智能交通信號(hào)燈管理系統(tǒng)可路口各個(gè)方向的車(chē)流進(jìn)行統(tǒng)計(jì)和預(yù)測(cè),并與相鄰路口的交通控制系統(tǒng)相互連接,同時(shí)獲取其他路口朝向本路口方向的車(chē)輛預(yù)測(cè)數(shù)據(jù),然后進(jìn)行優(yōu)化處理,并做出處理動(dòng)作。
內(nèi)部信息流向如圖1所示。具體工作原理及步驟有五點(diǎn)。
第一,獲取路口各個(gè)方向的實(shí)時(shí)車(chē)流信息:停車(chē)線(xiàn)后方的車(chē)輛識(shí)別裝置將獲取的信息傳遞給控制箱內(nèi)的微控制主機(jī),微控制主機(jī)對(duì)信息進(jìn)行分析識(shí)別和匯總,得到路口每個(gè)方向的實(shí)時(shí)車(chē)流信息。
第二,建立歷史車(chē)流信息數(shù)據(jù):經(jīng)過(guò)一段時(shí)間的收集和統(tǒng)計(jì),建立路口各個(gè)方向的歷史車(chē)流信息數(shù)據(jù)。
第三,預(yù)測(cè)未來(lái)某一時(shí)段路口各個(gè)方向的車(chē)流信息:微控制主機(jī)結(jié)合歷史車(chē)流信息數(shù)據(jù),根據(jù)軟件內(nèi)置的模型預(yù)測(cè)未來(lái)某時(shí)段的車(chē)流信息。
第四,做出決策:將實(shí)時(shí)車(chē)流信息與先前預(yù)測(cè)的車(chē)流信息進(jìn)行對(duì)比,疊加路口各個(gè)方向擁堵車(chē)流信息閾值,以及相鄰路口控制箱的微處理主機(jī)傳來(lái)的朝向路口方向的車(chē)流信息與決策數(shù)據(jù),并根據(jù)軟件事先設(shè)定的事件處理方式,做出相應(yīng)的實(shí)時(shí)決策和預(yù)測(cè)決策,最終將處理結(jié)果形成數(shù)據(jù),與當(dāng)前路口相應(yīng)方向的車(chē)流數(shù)據(jù)一起反饋回相鄰路口的微處理主機(jī)。
第五,實(shí)施路口交通控制:微處理主機(jī)將當(dāng)前路口做出的實(shí)時(shí)決策轉(zhuǎn)化成控制信號(hào),控制路口相應(yīng)方向紅綠燈的開(kāi)啟閉合,同時(shí)結(jié)合相鄰路口微控制主機(jī)反饋的決策數(shù)據(jù)與車(chē)流數(shù)據(jù)進(jìn)行不斷優(yōu)化處理,從而生成新的實(shí)時(shí)和預(yù)測(cè)決策,通過(guò)當(dāng)前路口的微處理主機(jī)轉(zhuǎn)化成控制信號(hào),實(shí)時(shí)形成對(duì)路口的交通控制。
通過(guò)以上步驟,可根據(jù)當(dāng)前實(shí)際車(chē)流量、預(yù)測(cè)未來(lái)車(chē)流量、周?chē)房谲?chē)流量和擁堵的車(chē)輛閾值實(shí)現(xiàn)對(duì)信號(hào)燈通行時(shí)間的分配,最大程度上減少車(chē)輛等待時(shí)間,避免因交通信號(hào)燈造成的堵塞,減緩交通壓力。
2 系統(tǒng)的實(shí)現(xiàn)
2.1 硬件及數(shù)據(jù)傳輸
2.1.1 控制箱。內(nèi)設(shè)置微控制主機(jī),微控制主機(jī)上設(shè)置微處理器、內(nèi)存、硬盤(pán)和通信接口。微處理器為高性能人工智能微處理器,選用一臺(tái)7.5 W的單模塊超級(jí)計(jì)算機(jī),目標(biāo)檢測(cè)能力強(qiáng),可為終端提供真正的AI計(jì)算功能,用于車(chē)流量的檢測(cè)。此微處理器基于NVIDIA Pascal? GPU 架構(gòu),搭載8 GB 內(nèi)存,且內(nèi)存帶寬為59.7 GB/s。同時(shí),微處理器配備多種標(biāo)準(zhǔn)硬件接口,可輕松與不同產(chǎn)品實(shí)現(xiàn)集成。對(duì)紅綠燈的控制則采用ALIENTEK MiniSTM32。
2.1.2 車(chē)輛識(shí)別裝置。車(chē)輛識(shí)別裝置由攝像頭及處理器組成,通過(guò)攝像頭對(duì)停車(chē)線(xiàn)后方各個(gè)車(chē)道的車(chē)輛進(jìn)行識(shí)別、攝像和拍照,并將信息傳輸至處理器,統(tǒng)計(jì)一定時(shí)間內(nèi)的車(chē)輛數(shù)量,從而計(jì)算出車(chē)流量。
2.1.3 相鄰路口控制箱之間的通信。相鄰路口控制箱之間的通信采用無(wú)線(xiàn)傳輸模塊ATK-LORA-1,具有體積小、微功率、低功耗、靈敏度高等優(yōu)點(diǎn)。
2.2 模型與算法實(shí)現(xiàn)
2.2.1 紅綠燈配時(shí)算法。依據(jù)模糊控制理論,根據(jù)當(dāng)前車(chē)流量和預(yù)測(cè)流量模型分配信號(hào)燈放行時(shí)間。將計(jì)算和預(yù)測(cè)得到的各方向的車(chē)流量信息輸入模糊控制器中,在模糊控制器中,對(duì)各方向車(chē)流量值進(jìn)行模糊化處理,轉(zhuǎn)化為系統(tǒng)可識(shí)別的模糊量,依據(jù)模糊控制規(guī)則庫(kù)進(jìn)行模糊推理,匹配最適合這一數(shù)值區(qū)間的紅綠燈開(kāi)閉時(shí)長(zhǎng),產(chǎn)生模糊控制量,再經(jīng)逆模糊化,產(chǎn)生可用于控制紅綠燈開(kāi)閉的時(shí)間數(shù)據(jù)[3]。模糊控制基本方法如圖2所示。
模糊控制具體過(guò)程為:將預(yù)測(cè)及計(jì)算后獲取到的實(shí)時(shí)車(chē)流量數(shù)據(jù)按照不同方向分類(lèi)輸入模糊算法控制器中,控制器根據(jù)方向?qū)④?chē)流量數(shù)據(jù)輸入指定的算法通道中,在通道中進(jìn)行模糊推理,算法首先確定車(chē)道數(shù)量及道路交通復(fù)雜情況,由此將路口模糊歸類(lèi),確定紅綠燈的總狀態(tài)數(shù),隨后算法標(biāo)定車(chē)流量數(shù)據(jù)并將車(chē)流量數(shù)值劃分至對(duì)應(yīng)區(qū)間,依據(jù)模糊控制規(guī)則庫(kù)中的車(chē)流量數(shù)據(jù)區(qū)間與紅綠燈開(kāi)閉時(shí)長(zhǎng)匹配每一狀態(tài)紅綠燈的開(kāi)閉時(shí)長(zhǎng),最后,綜合各方向數(shù)據(jù),依據(jù)模糊規(guī)則求解出路口各狀態(tài)紅綠燈開(kāi)啟順序和時(shí)長(zhǎng)數(shù)據(jù),并將數(shù)據(jù)轉(zhuǎn)化為字節(jié)類(lèi)型,以便后續(xù)與紅綠燈控制模塊進(jìn)行通信。
2.2.2 車(chē)流量統(tǒng)計(jì)模型。采用視頻檢測(cè)技術(shù)對(duì)車(chē)流量進(jìn)行檢測(cè),可以在不破壞路基的前提下實(shí)現(xiàn)車(chē)流量的檢測(cè),檢測(cè)范圍比較廣[4-5]。虛擬線(xiàn)圈檢測(cè)法是通過(guò)在所獲取的交通路口圖像中設(shè)置一個(gè)感興趣區(qū)域,作為主要的待測(cè)區(qū)域研究。該監(jiān)測(cè)方法可以減少程序的運(yùn)算量,只對(duì)設(shè)置的虛擬區(qū)域內(nèi)的圖像變化特征進(jìn)行研究和處理來(lái)獲取車(chē)流量,并不需要對(duì)整個(gè)圖像進(jìn)行研究[6]。本系統(tǒng)采用虛擬線(xiàn)圈檢測(cè)法,通過(guò)在車(chē)道線(xiàn)的某一處設(shè)置虛擬線(xiàn)圈,利用攝像頭捕捉通過(guò)車(chē)輛的圖像,實(shí)現(xiàn)車(chē)輛數(shù)量的統(tǒng)計(jì),從而計(jì)算出車(chē)流量。
3 系統(tǒng)優(yōu)勢(shì)
分布式智能交通信號(hào)燈管理系統(tǒng)通過(guò)綜合路口處各種車(chē)流量信息,實(shí)現(xiàn)了對(duì)交通信號(hào)燈放行時(shí)間的調(diào)整。相較于傳統(tǒng)的交通信號(hào)燈管理系統(tǒng),具有三點(diǎn)優(yōu)勢(shì)。
①當(dāng)路口控制箱內(nèi)的微處理主機(jī)與相鄰路口控制箱內(nèi)的微處理主機(jī)全部失聯(lián)時(shí),則根據(jù)路口方向的實(shí)時(shí)車(chē)流信息,結(jié)合歷史車(chē)流信息,自主決策運(yùn)行路口各個(gè)方向的紅綠燈。當(dāng)前的微處理主機(jī)只要與相鄰路口的任一控制箱內(nèi)的微處理主機(jī)相連,即可通過(guò)轉(zhuǎn)接方式獲取其他相鄰路口傳遞的車(chē)流數(shù)據(jù)和決策信息,并將路口各個(gè)方向的車(chē)流數(shù)據(jù)與決策信息傳遞給所連接相鄰路口的微處理主機(jī),實(shí)現(xiàn)實(shí)時(shí)接收所有路口方向的車(chē)流信息和決策信息。
②與集中式智能交通控制系統(tǒng)相比,分布式智能交通控制系統(tǒng)的控制箱只負(fù)責(zé)處理分析當(dāng)前路口各個(gè)方向的車(chē)流數(shù)據(jù),并結(jié)合相鄰路口控制箱內(nèi)微處理主機(jī)傳遞的數(shù)據(jù),做出路口信息的實(shí)時(shí)和預(yù)測(cè)決策,降低微控制主機(jī)內(nèi)硬件性能的要求。交通控制系統(tǒng)的控制箱的微控制主機(jī)就設(shè)置在各路口,物理距離的縮短省去了發(fā)送數(shù)據(jù)至中央處理器再返回?cái)?shù)據(jù)的時(shí)間,提高了系統(tǒng)響應(yīng)速度。
③分布式智能交通信號(hào)燈管理系統(tǒng)在現(xiàn)有的智能交通控制系統(tǒng)上進(jìn)行了創(chuàng)新,采用分布式控制系統(tǒng),解決了集中式控制系統(tǒng)帶來(lái)的各種不便,具有容災(zāi)性好、響應(yīng)速度快、功能多樣化等創(chuàng)新點(diǎn)。
4 結(jié)語(yǔ)
本文設(shè)計(jì)的分布式智能交通信號(hào)燈管理系統(tǒng),具有容災(zāi)性好、響應(yīng)速度快、硬件成本低的優(yōu)點(diǎn)。我國(guó)已有的分布式交通控制系統(tǒng)都由一個(gè)中心服務(wù)器作為高級(jí)控制中心[1],硬件成本高。分布式智能交通信號(hào)燈管理系統(tǒng)不再需要總中心服務(wù)器,各個(gè)路口的控制箱可以結(jié)合相鄰路口信息作出本路口的決策。同時(shí),分布式的結(jié)構(gòu)使得系統(tǒng)的應(yīng)用價(jià)值提高,具有廣闊的應(yīng)用前景。
參考文獻(xiàn):
[1]章偉,張代遠(yuǎn).基于車(chē)流量的交通燈控制系統(tǒng)設(shè)計(jì)[J].計(jì)算機(jī)技術(shù)與發(fā)展,2015(5):196-199.
[2]于泉,石建軍,榮建,等.我國(guó)多層分布式交通信號(hào)控制系統(tǒng)結(jié)構(gòu)的研究[J].ITS通訊,2004(3):28-30.
[3]朱曉航,胡佳琳.交通路口紅綠燈智能模糊控制方法研究[J].科技傳播,2014(21):216-217.
[4]潘喆,吳一全.二維Otsu圖像分割的人工魚(yú)群算法[J].光學(xué)學(xué)報(bào),2009,29(8):2115-2121.
[5]王聯(lián)國(guó),洪毅,趙付青,等.一種改進(jìn)的人工魚(yú)群算法[J].計(jì)算機(jī)工程,2008(19):192-194.
[6]張虹波,匡銀虎.基于視頻檢測(cè)技術(shù)的交通車(chē)流量研究[J].計(jì)算機(jī)與現(xiàn)代化,2014(12):58-63.