履帶式坡地玉米收獲機設計與試驗
2021-09-16 08:10:34耿端陽孫延成李華彪牟孝棟張國棟王宗源鹿秀鳳
農業工程學報 2021年13期
關鍵詞:作業
耿端陽,孫延成,李華彪,牟孝棟,張國棟,王宗源,鹿秀鳳
履帶式坡地玉米收獲機設計與試驗
耿端陽1,孫延成1,李華彪1,牟孝棟1,張國棟1,王宗源1,鹿秀鳳2
(1. 山東理工大學農業工程與食品科學學院,淄博 255000;2. 山東理工職業學院機電工程學院,濟寧 272000)
針對中國丘陵山地玉米種植以小地塊、坡地塊較多制約玉米機械化收獲的現狀,設計了一款履帶式坡地玉米收獲機,實現山地丘陵地區復雜地形條件玉米機械化收獲。該收獲機采用橫輥摘穗技術,解決了傳統摘穗輥喂入性不流暢和復雜地形下玉米植株的喂入問題,提高割臺的喂入量,有效縮短整機長度0.5~1.2 m左右;并采用可伸縮式履帶行走底盤,通過調整履帶輪距增大整機重力變化的安全范圍,降低坡地作業機器側翻風險,使整機在復雜地形條件下的行駛穩定性提高了27.34%;基于液壓控制原理研制了雙向作業操控系統,實現在山地丘陵等小地塊條件下的轉彎掉頭作業功能;通過正交試驗確定果穗損失率考核指標的影響因素,包括機具前進速度、摘穗輥間隙、摘穗輥轉速;利用Design-expert建立各影響因素與指標間的數學回歸模型,確定了最佳參數組合:機具前進速度為2 km/h、摘穗輥間隙為14 mm、摘穗輥轉速為1 000 r/min;在該最優參數組合工況下,果穗損失率為1.25%。該機設計各項指標符合國家相關標準,能夠滿足丘陵山地地區玉米機械化收獲需求。
玉米;收獲機;丘陵山地;橫輥割臺;防側翻;雙向操作
0 引 言
玉米作為中國三大主要糧食作物之一,具有糧食、飼料等多種用途,在農業生產中占有重要地位[1-5]。2017年農業部在重慶市召開全國丘陵山地農業機械化發展座談會指出全國農作物耕種收綜合機械化率已達到66%以上,部分省已達到80%以上,但丘陵山地的農業機械化程度還比較低,甚至不到40%。2019年山東省玉米種植面積400.18萬hm2,占全國的9.69%,總產量2 536.5萬t,占全國的9.72%,但丘陵山地地區仍以人工收獲為主,部分地區人工成本已占據生產成本的74.3%,導致玉米生產效益的虧損[6-9]。現有機型對玉米種植行距要求嚴格,很難適應不同行距的玉米收獲、同時由于丘陵山地地形的限制難以在丘陵山地上進行轉移和作業,因此開發一款能夠適應丘陵山地地形和不同行距收獲要求的玉米收獲機成為解決上述問題的關鍵。
為了解決丘陵山地玉米機械化收獲的問題,國內學者針對上述問題做了基于手扶拖拉機的微型懸掛式玉米收獲機的相關研究。王升升等研制了與手扶拖拉機配套4YW-1微型玉米收獲機,但存在水平摘穗輥距地面較高容易出現漏收的問題[10]。張奎等開發了與手扶拖拉機配套的雙行玉米收獲機,但該機配套動力小,僅能實現果穗的摘取過程,作業效率有待提高[11]。李俊等設計了一種基于微耕機底盤驅動的小型玉米收獲機,解決了間套作模式的玉米收獲問題[12]。國外紐荷蘭的CSX7050山地型玉米收獲機能夠在復雜地形條件下保證收獲機的水平面,通過控住橫向校正與縱向校正兩個獨立的液壓系統并配套相應傳感器保持收獲機的水平面。John Deere研發的12行大型玉米收獲機,通過割臺仿形技術、后驅動動力模式以及安裝測試玉米植株位置的行走感應系統,使收獲機精確對行收獲[13-15]。
綜上所述,國內相關研究的玉米收獲機存在結構簡單功能少、作業效率低等問題,而國外大型玉米收獲機難以適應小地塊的收獲需要。本文結合當前中國丘陵山地存在小地塊、地形復雜制約玉米機械化收獲的現狀,提出以橫輥割臺、全液壓傳動、雙向作業操作、防側翻相融合的模塊化坡地玉米收獲機設計方案,并開發了樣機,以期為丘陵山地玉米高效低損收獲提供裝備支持。
1 整機結構與工作原理
1.1 整機結構
履帶式坡地玉米收獲機結構如圖1,其技術指標如表1所示。主要結構包括:橫輥摘穗式割臺、果穗縱向升運裝置、果穗剝皮裝置、籽粒回收裝置、果穗收集箱、轉盤式連接底盤、可伸縮式履帶行走底盤等組成。其中橫輥摘穗式割臺包括撥指式撥禾鏈、橫向摘穗裝置、果穗橫向輸送裝置等,其中果穗橫向輸送裝置采用大螺距攪龍結構,可提高果穗橫向輸送速度,避免果穗在割臺堆積;縱向輸送裝置采用刮板式輸送方式,減少了果穗與輸送通道的摩擦,降低了果穗損傷;剝皮裝置采用V型槽式布局結構,有效提高了果穗剝皮的生產率;集穗箱用于果穗的收集;籽粒回收裝置采用振動篩式外排結構,即隨著對苞葉的振動,夾雜于苞葉中的籽粒被分離出來,落入籽粒回收箱完成籽粒回收等。集成上述功能部件形成一個大的模塊,并將其整體裝配在基于液壓驅動的履帶式底盤上。
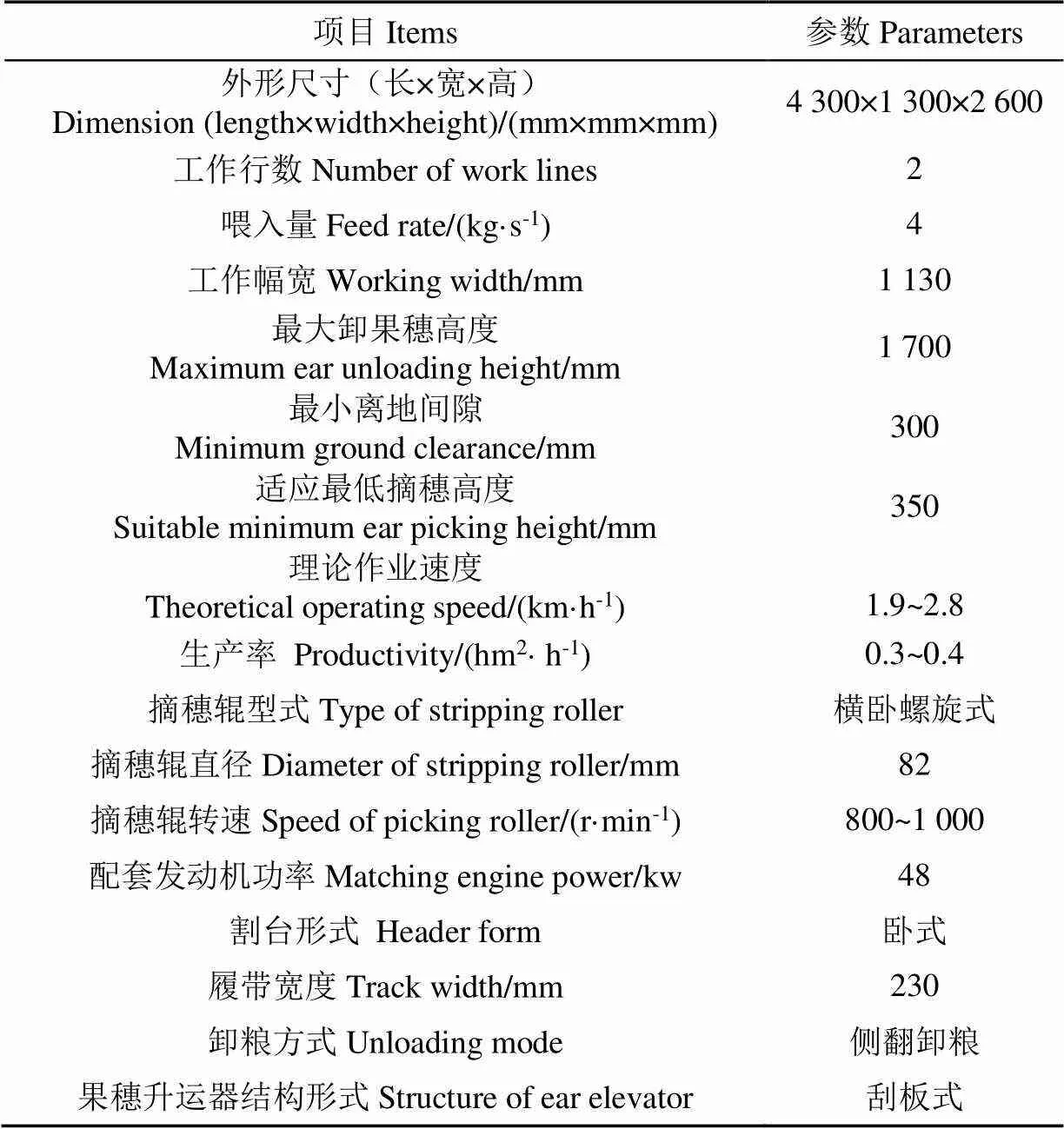
表1 主要技術參數
1.2 工作原理
機具在作業過程可實現分禾、扶禾、夾持喂入、摘穗、剝皮、輸送、收集等工序。工作時,玉米植株首先由分禾器將其向兩邊分開,分禾器下部撥指式撥禾鏈將玉米植株主動引向摘穗裝置,摘穗輥摘下的果穗首先由果穗橫向輸送裝置送向機器右側的果穗縱向升運器,并由該輸送器縱向輸送到剝皮裝置,完成苞葉與果穗分離后,果穗滑落到集穗箱;而苞葉則通過剝皮輥后落入下方的振動式苞葉輸送裝置,完成苞葉的向外排出,在此過程,隨著苞葉的振動排出,夾雜在苞葉中的籽粒落入其下方的籽粒回收箱,以減少收獲過程的籽粒損失。
2 關鍵部件設計
2.1 橫輥摘穗式玉米割臺
2.1.1 主要結構及工作過程
為了提高坡地作業的適應性,本機采用橫輥摘穗方式,相比傳統的縱臥輥式摘穗方式有效縮短整機長度0.5~1.2 m左右。履帶式坡地玉米收獲機的橫輥摘穗式玉米割臺如圖2所示。其主要由左右側分禾器、中分禾器、撥禾指、撥禾鏈、摘穗單元體、果穗輸送裝置組成。位于割臺前部的分禾裝置,主要由分禾器、撥禾鏈組成;摘穗輥由一組長、短2個橫向分布的摘穗輥組成摘穗單元體,摘穗輥軸向相互平行,摘穗輥布局上采用前高后低分布方式,減少了摘下果穗向外掉落的收獲損失,同時還可防止摘穗輥對果穗的啃傷;每個摘穗輥分為三部分,前段為帶有較高葉片的螺旋結構,實現玉米莖稈強制喂入,可以保證撥禾指導來玉米能快速送向摘穗輥間隙;中段為變螺距、旋向相反、錯位布置的螺旋凸棱組成,提高了對莖稈的抓取和摘穗能力,防止莖稈在此堵塞;后段為強拉筋以確保在前2個階段未被摘掉的果穗的玉米植株在此處被擠斷,保證摘穗過程的順利進行。分禾器將待收獲玉米的引導分流,并將位于分禾器下部的撥指式撥禾鏈強制將其送向橫輥摘穗入口,果穗在摘穗輥的作用下進行摘落,摘下的果穗在重力作用和機器前進慣性力作用下向后落入果穗橫向輸送收集槽,并在該處橫向輸送攪龍作用下送往果穗縱向器。
2.1.2 橫輥摘穗裝置結構設計
摘穗裝置是果穗收獲型玉米收獲機的核心部件,為了適應丘陵山地地形復雜和面積偏小的條件,本機采用了橫輥摘穗結構,如圖3所示。
為提高玉米收獲的對行性,橫輥摘穗裝置采用前短后長擴大喂入口尺寸結構,即前輥較后輥長度短15~20 cm,從而使喂入口尺寸大于傳統縱臥輥式結構(縱臥結構的喂入口大約7~10 cm),有效提高了機具對行距的適應性和植株喂入的順暢性;又為了在植株遇到后輥后能強制改變運動方向,即由原來的沿著機器作業方向的縱向運動,變為沿著摘穗輥軸向的橫向運動,所以摘穗輥上設置了強制喂入的螺旋葉片,且前后兩輥的螺旋葉片旋向相反,保證了即使莖稈未能喂入喂入口,也能被前輥的螺旋葉片強制引導到喂入口,防止了玉米植株在此擁堵。摘穗輥由變螺距、旋向相反、錯位布置的螺旋凸棱組成,提高了對莖稈的抓取和摘穗能力,防止莖稈在此堵塞;后段為強拉筋以確保在前2個階段未被摘掉的果穗的玉米植株在此處被擠斷,保證摘穗過程的順利進行。
1)摘穗輥直徑確定
摘穗輥直徑按照傳統理論來設計[16],即保證摘穗輥能抓取莖稈而不抓取果穗。
式中為果穗直徑,mm;為莖稈直徑,mm;為摘穗直徑,mm;為摘穗輥直徑,mm;、為摘穗輥對果穗和莖稈的抓取系數;對于鑄鐵摘穗輥,查農業機械手冊,==0.7~1.1。
代入相關數據,則可得:
計算得:72≤≤100
結合生產實際,雖然較大的摘輥間隙有利于提升莖稈的攝取能力,但同樣對果穗有較強的抓取能力,即容易導致果穗籽粒損傷和損失的增加, 因此應選取合理摘輥直徑,保證摘穗輥的摘穗能力,本機摘穗輥直徑確定為82 mm。
2)摘穗輥輥型的確定
為了保證待收玉米植株能強制進入摘穗輥間隙,所以在摘穗輥表面設有螺旋凸棱,考慮黃淮海地區玉米植株株距多為15~23 cm,平均株距為20 cm,所以設計時為了防止植株滑脫螺旋凸棱,螺旋凸棱高度設計為大于莖稈間隙的一半,即選取螺旋凸棱高度為8~15 mm,同時為保證玉米果穗能夠低損傷摘落,結合前人設計經驗橫輥式摘穗輥摘輥間隙選取12~16 mm[17]。
為提高對玉米品種的適應性,結合本機的摘穗輥較常規摘穗輥長度短了一半,即本研究中長摘穗輥長度為50~60 cm,為保證摘穗效果其轉速應該大于傳統縱臥式玉米摘穗輥轉速,參照傳統縱臥式玉米摘穗輥轉速[18-23],選取橫輥式玉米摘穗輥的轉速范圍為800~1 000 r/min。
設機器作業時速度(m/s),玉米種植株距為(m),為了降低摘穗過程的功率消耗,盡量保證摘穗輥每次只有一株莖稈在摘穗輥中,所以機器作業時前進一個株距所用的時間為,則有:
=/v(3)
假設摘穗輥轉速為(r/min),玉米植株結穗高度為(m),為了保證在一個株距進距時間能使植株脫離摘穗輥,則有:
化簡后有:


代入相關數據得螺距0=0.038 mm。轉化為螺旋角為:

代入相關數據,經計算后,則螺旋角=20.79°。
2.2 可伸縮式履帶行走底盤設計
針對坡地作業地形復雜容易導致收獲機側翻的問題,本機底盤采用可伸縮式底盤,為了增強機具接觸地表面積,選用了履帶式行走裝置,提高收獲機與地表的接觸面積,減小對地面的碾壓破壞。同時履帶采取橫向可伸縮結構,擴大履帶與地表接觸所形成的重力安全變化區域,防止發生側翻現象[24-28]。
可伸縮履帶底盤,主要由左行走梁、伸縮架和右行走梁組成。其中伸縮架呈工字型布置,伸縮架的4個伸縮臂內均安裝有液壓缸,其中2個液壓缸的活塞桿與左行走梁相連,另外2個液壓缸的活塞桿與右行走梁相連,伸縮架的4個伸縮臂與對應的左、右行走梁的伸縮孔相配合,左、右行走梁上均安裝有履帶,在伸縮臂的側壁上安裝有耐磨板,在左、右行走梁的前端安裝有驅動輪負責驅動履帶行走,在左、右行走梁的后端安裝有引導輪,在左、右行走梁的下端安裝有支重輪負責承受整機質量,其結構如圖4所示。
考慮到在坡地作業時行駛負載及收割作業時受到的阻力會直接影響整機在田間的行走、越梗、轉向等功能,為達到坡地玉米收獲機的作業要求,參照其他小型履帶式收獲機的設計經驗[29-30],采用10 t級工程車輛液壓系統以滿足收獲時的作業要求。
為分析該結構對作業穩定性的影響規律,將整機進行簡化,并對其進行受力分析,如圖5所示。
設初始狀態下履帶受到地面的支持力為1(N),輪距擴展后其受力為2(N),則:在平整地面作業時,顯然,履帶受到的地面支撐力為重力的一半,即:
1=/2 (8)

顯然,由

從而有:
其翻轉力矩為:

因此對履帶輪距未擴展前,其臨界翻轉角度為:
由該式可以看出,在坡地工作的玉米收獲機,其翻轉與重力位置和履帶跨距有關,且隨著裝備重心位置的提高,則其翻轉角度變小,即在坡度地面作業時翻轉風險較大;相反則較小,這就是在設計裝備時力求降低重心位置的原因。隨著履帶跨距的增加,則其翻轉角度增大,即在坡度作業時翻轉風險更小;相反,則增大了裝備傾覆的風險。
在本機中,由于輪距初始值為1.36 m,重力高度為0.65 m,則其翻轉角度=46.29°;為了驗證不同輪距對翻轉角度的影響在同一坡地下輪距在初始輪距的基礎上分別擴展0.2、0.4、0.6、0.8 m得到擴展后的輪距與翻轉角度的變化曲線如圖6所示。
采用輪距擴展后,當向外擴展距離為0.8 m時,則其翻轉角度=58.95°,顯然其翻轉風險降低了(58.95?46.29)/ 46.29×100%=27.34%,即顯著降低了機器在坡地作業時出現翻轉的風險,或者說有效提高了機器對復雜坡地的適應能力。
2.3 雙向作業操控系統設計
針對丘陵山地地區地塊面積小,難以滿足大回轉半徑的轉彎/調頭要求,因此開發了轉盤式連接底盤裝置。將底盤與玉米收獲裝置通過可大角度調控的轉盤進行連接,實現了地頭底盤不轉而功能部件隨轉盤轉動360°的功能,該底盤具體結構如圖7所示。
為了保證雙向作業操控系統的平穩運行,雙向作業操控系統采用液壓傳動,參照其他雙向作業操控系統的設計經驗[31-32],雙向作業操控系統液壓傳動原理圖如圖8所示。
當操縱履帶式坡地玉米收獲機進行轉向/掉頭作業時,回轉油泵將輸出的壓力油輸送到回轉操縱閥一側,推動回轉操縱閥閥芯移動,打開回轉操縱閥的油路,回轉油泵的壓力油經回轉換向閥到回轉馬達中,驅動回轉馬達旋轉。同時回轉油泵中的壓力油進入到制動器控制閥,使回轉油泵中的壓力油進入到回轉制動器,將回轉制動器中的制動活塞頂起,回轉馬達方可驅動連接轉盤轉動。相比輪式玉米收獲機在大田中平均轉彎掉頭時間在40 s左右,由于丘陵山地地形條件的限制將會進一步增加轉彎掉頭時間,而具有雙向作業操作系統的坡地玉米收獲機在測試時轉向時間僅需7 s左右,使整機轉彎掉頭效率提高了90%以上。
考慮玉米收獲機功能集成模塊雖然質量較大,但是帶動其轉動的轉盤阻力小(滾動摩擦)、速度慢,在工作中又是短時工作,所以根據系統要求的轉動角度,選擇了派樂士P6系列雙聯齒輪泵和雙葉片擺動液壓回轉馬達BMS-110,其中雙聯齒輪泵壓力可達25 MPa、排量540 mL/r,雙葉片擺動液壓回轉馬達BMS-110其實際轉矩為1 114 N·m、額定轉速為125 r/min,輸入功率11 kW,輸出功率2.3 kW、排量354 mL/r,其轉矩在徑向尺寸和液壓油壓力相同的條件下,可以達到單葉片擺動馬達的2倍;加之其轉角可以達到270°,所以完全滿足生產使用要求。
3 田間試驗
3.1 試驗條件
試驗地點在山東省濟寧市兗州區大安鎮山東國豐機械有限公司試驗田進行,試驗田為山東玉米的較高產地帶,示范基地玉米種植行距為600 mm,其試驗地長度大約75 m、寬度20 m,適合機械化收獲,試驗過程如圖9所示。
收獲玉米品種為鄭單958號,其收獲期的物理特性為:收獲籽粒含水率33.5%左右,莖稈含水率89%以上,果柄含水率52%以上,百粒質重40~51 g,植株倒伏率低于5%,果穗下垂率低于5%,行距55 cm,最低結穗高度大于350 mm。
3.2 試驗方法
根據GBT21961-2008《玉米收獲機械-試驗方法》,GBT 21962-2008 《玉米收獲機械-技術條件》以及NY/T645-2002《玉米收獲機質量評價技術規范》對履帶式坡地玉米收回及進行試驗測試。為獲取果穗損失率所使用的主要檢測設備包括:30 m卷尺、TL-4型智能水分測試儀、J9-2型電子秒表、HCS-50型電子吊秤、JJ3000型電子天平、TEST0410-2型數字式風速儀。
在測定區,收集摘漏和掉落的果穗,脫凈后稱質量,其中果穗的損失率為:
式中1為果穗損失率,%;1為測定區斷、碎和落地果穗的質量,kg;2為測定區內果穗質量,kg。
3.3 試驗方案與試驗結果分析
3.3.1 整機性能測試試驗
為了得到最佳的工作參數組合,同時考慮到丘陵山地整機的作業速度較低,盲目的增加作業速度會對果穗造成較大的損傷[33-34]。為了得到合理的作業速度選取履帶式坡地玉米收獲機正常作業速度范圍1.9~2.8 km/h,而且由于履帶式坡地玉米收獲機尚屬于新機型,整機其他結構未做重大改進而割臺作為影響果穗損失率的關鍵因素進行相關改進,因此選取影響割臺性能的主要參數進行整機測試試驗。根據前期理論設計的結果,選取橫輥式摘穗輥摘輥間隙選取為12~16 mm、選取橫輥式玉米摘穗輥的轉速范圍為800~1 000 r/min。因此設機器前進速度1、摘穗輥間隙2、摘穗輥轉速3,考核指標為果穗損失率1,對其進行3因素3水平正交試驗,試驗因素編碼表如表2所示。
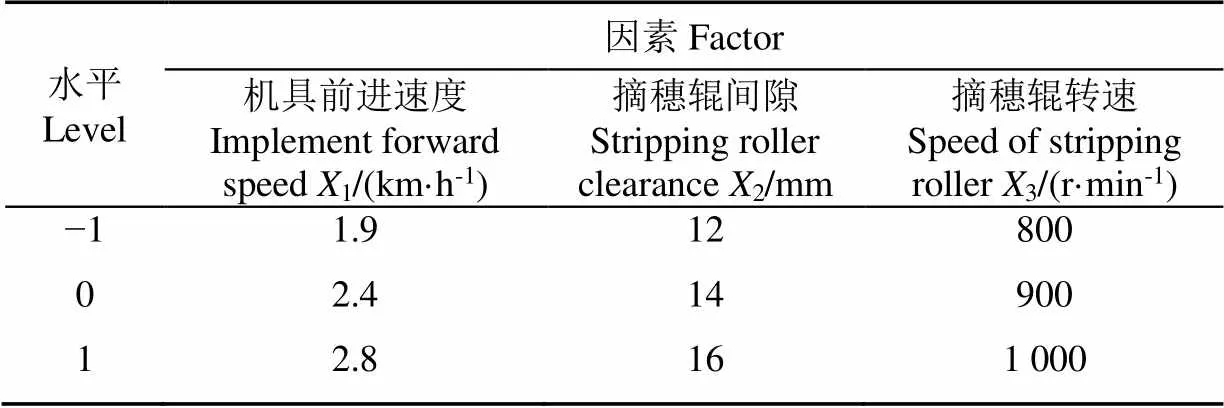
表2 試驗因素與水平
3.3.2方差分析
為了探尋履帶式玉米收獲機最佳工作參數,利用Design Expert軟件對試驗結果進行二次回歸分析[35-36],并進行多元回歸擬合,得到果穗損失率試驗指標的回歸方程,并對其進行方差分析,試驗結果如表3所示。

表3 試驗方案和結果
通過對數據進行分析,得到果穗損失率的方差如表4所示,同時對試驗結果進行二次回歸分析,并進行多元回歸擬合得到各因素與考核指標間的回歸方程如下:
式中1為整機前進速度,km/h;2為摘穗輥的間隙,mm;3為摘穗輥轉速,r/min;1為果穗損失率,%。
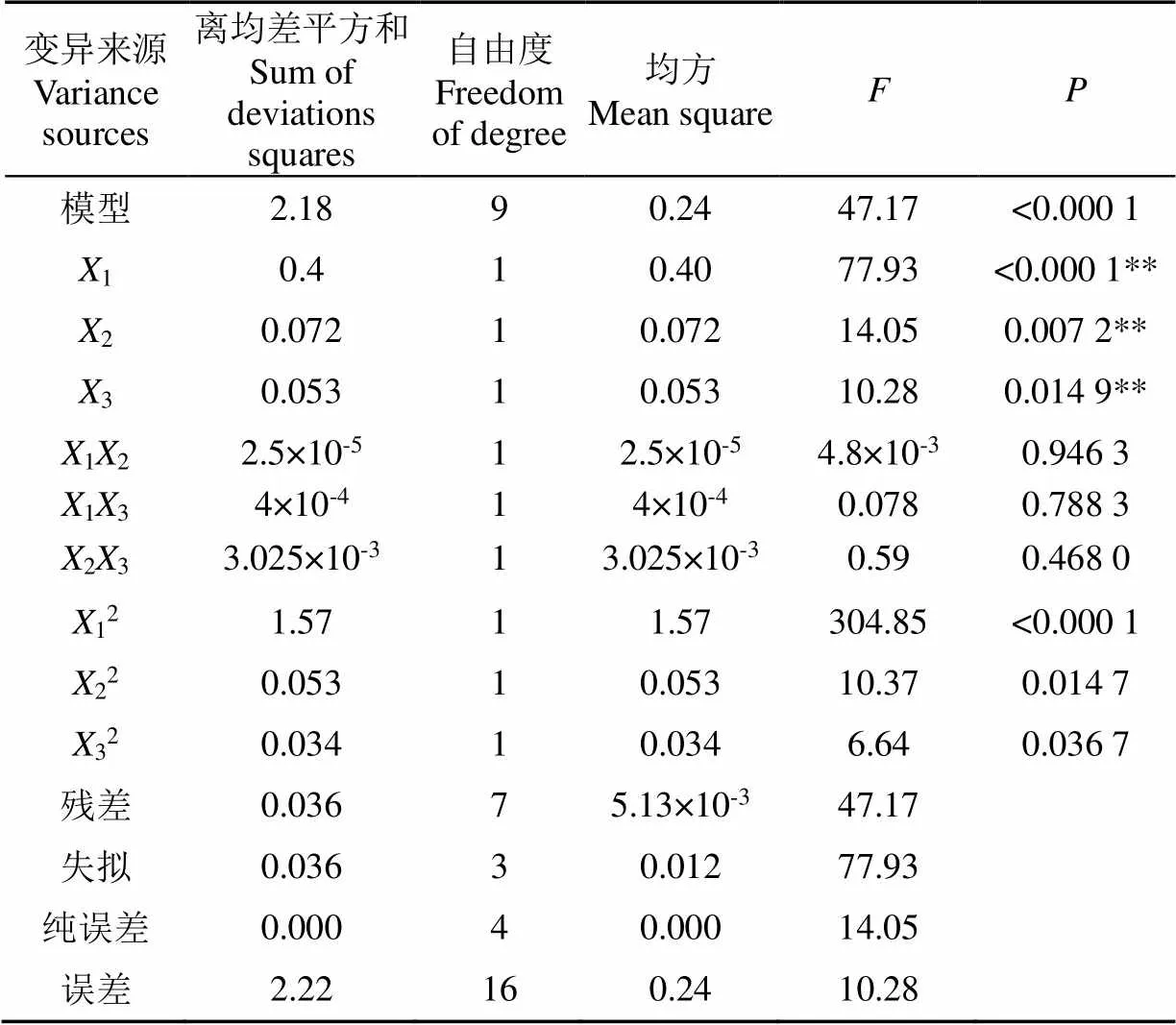
表4 果穗損失率的方差分析
注:**代表試驗因素在0.01顯著性水平下顯著;*代表試驗因素在0.05顯著性水平下顯著。
Note: ** representative test factors are significant at 0.01 significance level; * representative test factors are significant at 0.05 significance level.
由方差分析可知,機器的前進速度、摘穗輥間隙、摘穗輥轉速對果穗損失率的影響性不同。通過果穗損失率方差分析結果可知,試驗模型顯著(<0.01),其中機器前進速度的失擬項<0.000 1,表明機器前進速度果穗損失率影響極顯著;摘穗輥間隙的失擬項=0.007 2<0.01,表明摘穗輥的間隙對果穗損失率影響極顯著;摘穗輥轉速的失擬項=0.014 9<0.05,故摘穗輥轉速對果穗損失率影響顯著。
由于在玉米植株收獲的過程中,機器前進速度的越大,喂入量越大,易造成擁堵,導致果穗與割臺、果穗與果穗間的碰撞概率增加造成果穗損失率增大;摘穗輥間隙較小時,在摘取果穗的過程中,玉米果穗易于摘穗輥發生碰撞,導致玉米果穗落粒和啃傷的現象發生。但摘穗輥間隙較大時,在玉米果穗摘取過程中,摘穗輥對玉米植株的夾持效果不穩定,玉米植株輸送效果差,導致果穗啃傷、落粒、以及莖稈推倒或滑脫造成了果穗掉落;由于割臺采用的是橫輥式摘穗輥,摘穗輥長度較常規摘穗輥長度短一半,轉速較低時會導致多株莖稈進入同時摘穗以及摘穗輥對莖稈的抓取力不足,存在循環抓取的現象發生,使果穗與摘穗輥的碰撞次數增多,導致果穗損失率增大。而隨著摘穗輥轉速增加,摘穗輥的拽拉力不斷增大從而使莖稈更易折斷,玉米果穗伴隨折斷玉米莖稈掉落,降低了果穗損失率。
通過方差分析結果可知表明所選3個參數都是影響果穗損失率的主要因素。
3.4 驗證試驗
在上述研究的基礎上,為得到最佳水平參數組合,對試驗進行優化設計,建立參數化數學模型,對果穗損失率的回歸方程進行分析,根據實際作業及相關理論依據選擇優化約束條件,其目標與約束函數如式(16)所示
對目標函數進行圓整優化,得到結果為:當機具前進速度為2 km/h,摘穗輥間隙為14 mm,摘穗輥轉速為1 000 r/min時,果穗損失率為1.27%。
為驗證優化分析結果,在最佳水平參數組合下對果穗損失率進行驗證試驗,為消除隨機誤差,試驗重復5次,試驗結果取平均值,結果表明果穗損失率為1.25%,圓整優化結果可信。
4 結 論
1)針對中國丘陵山地玉米種植地塊小、作業環境復雜制約玉米機械化收獲的現狀,研制了一款履帶式坡地玉米收獲機,可實現在山地丘陵地區復雜地形條件下玉米機械化收獲。
2)開發了橫輥摘穗技術,解決了傳統摘穗輥喂入適應性不強和復雜地形下玉米植株的喂入問題,提高了割臺的喂入量;有效縮短整機長度0.5~1.2 m左右;研究了可伸縮式履帶行走底盤,通過調整履帶輪距增大了整機重力變化的安全范圍,降低坡地作業機器側翻風險;使整機在復雜地形條件下的行駛穩定性提高了27.34%;基于液壓控制原理研制了雙向作業操控系統滿足了履帶式坡地玉米收獲機在山地丘陵等小地塊條件下的轉彎掉頭需求,使整機轉彎掉頭效率提高90%以上。
3)通過正交試驗確定果穗損失率考核指標的影響因素有機具前進速度、摘穗輥間隙、摘穗輥轉速,利用Design-expert建立各影響因素與指標間的數學回歸模型,確定了最佳參數組合:在機具前進速度為2 km/h、摘穗輥間隙為14 mm、摘穗輥轉速為1 000 r/min時,果穗損失率為1.25%。所設計的玉米收獲機各項指標符合國家相關標準,能夠滿足丘陵山地地區玉米機械化收獲需求。
[1] 程修沛,賈曉東,陳美舟,等. 上拉莖掰穗式玉米收獲臺架試驗與分析[J]. 農業工程學報,2016,32(22):50-55.
Cheng Xiupei, Jia Xiaodong, Chen Meizhou, et al. Experiment and analysis on test device of corn ear picking by pulling stalk upwards[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(22): 50-55. (in Chinese with English abstract)
[2] 中國統計局. 中國統計年鑒2020[M]. 北京:中國統計出版社,2020.
[3] 賈學文. 中國玉米市場供求關系研究[D]. 北京:中國農業科學院,2014.
Jia Xuewen. Research on the Supply and Demand of Corn Market in China[D]. Beijing: Chinese Academy of Agricultural Sciences, 2014. (in Chinese with English abstract)
[4] 翁凌云. 我國玉米生產現狀及發展對策分析[J]. 中國食物與營養,2010(1):22-25.
Weng Lingyun. Analysis on the current situation and development countermeasures of maize production in China[J]. Chinese Journal of Food and Nutrition, 2010(1): 22-25. (in Chinese with English abstract)
[5] 張道林,刁培松,董鋒,等. 撥禾指式不對行玉米收獲裝置的試驗[J]. 農業工程學報,2010,26(5):103-106.
Zhang Daolin, Diao Peisong, Dong Feng, et al. Experiment of no-row corn harvesting device with finger wheel[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(5): 103-106. (in Chinese with English abstract)
[6] 叢宏斌,姚宗路,趙立欣,等. 中國農作物秸稈資源分布及其產業體系與利用路徑[J]. 農業工程學報,2019,35(22):132-140.
Cong Hongbin, Yao Zonglu, Zhao Lixin, et al. Distribution of crop straw resources and its industrial system and utilization path in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(22): 132-140. (in Chinese with English abstract)
[7] 姚艷春,劉元義,牛國棟,等. 山東旱作灌溉區小麥—玉米全程機械化技術模式經濟效益分析與評價方法[J]. 中國農機化學報,2020,41(12):6-11.
Yao Yanchun, Liu Yuanyi, Niu Guodong, et al. Economic benefit analysis and evaluation method of wheat maize whole mechanization technology mode in dry farming irrigation area of Shandong Province[J]. Journal of Chinese Agricultural Mechanization, 2020, 41(12): 6-11. (in Chinese with English abstract)
[8] 陳志,郝付平,王鋒德,等. 中國玉米收獲技術與裝備發展研究[J]. 農業機械學報,2012,43(12):44-50.
Chen Zhi, Hao Fuping, Wang Fengde, et al. Development of technology and equipment of corn harvester in China[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(12): 44-50. (in Chinese with English abstract)
[9] 劉憲軍. 新型玉米摘穗裝置的研究[D]. 長春:吉林大學,2014.
Liu Xianjun. Study on a New Type of Corn Ear Picking Device[D]. Changchun: Jilin University, 2014. (in Chinese with English abstract)
[10] 王升升,任靜,李靈敏,等. 4YW-1型玉米聯合收獲機的設計[J]. 農機化研究,2015,37(4):107-109,113.
Wang Shengsheng, Ren Jing, Li Lingmin, et al. Design of the 4YW-1-type corn combine harvester[J]. Journal of Agricultural Mechanization Research, 2015, 37(4): 107-109, 113. (in Chinese with English abstract)
[11] 張奎,劉師多,師清翔,等. 丘陵山區雙行玉米聯合收獲機的設計[J]. 河南科技大學學報:自然科學版,2014,35(5):68-72,111.
Zhang Kui, Liu Shiduo, Shi Qingxiang, et al. Design of double row corn harvester in hilly and mountains area[J]. Journal of Henan University of Science and Technology: Natural Science, 2014, 35(5): 68-72, 111. (in Chinese with English abstract)
[12] 李俊,岳高峰,葉進,等. 小型玉米收獲機的設計試驗與參數優化[J]. 農機化研究,2018,40(11):176-179,184.
Li Jun, Yue Gaofeng, Ye Jin, et al. Design experiment and parameter optimization of small corn harvester[J]. Journal of Agricultural Mechanization Research, 2018, 40(11): 176-179, 184. (in Chinese with English abstract)
[13] Quick G R. Single-pass corn and stover harvesters: development and performance[C]//Proceeding of International Conference on Corp Harvesting and Processing. Louisville, Kentucky, USA, 2003.
[14] Willcutt H. Corn harvesting, drying, and storage: extension service of Mississippi[J]. Cooperating with U.S. Department of Agriculture, 2001, 41(5): 37-41.
[15] Tulpule P, Kelkar A. Integrated robust optimal design (IROD) of header height control system for combine harvester[C]//2014 American Control Conference. Portland, OR, USA, IEEE, 2014: 2699-2704.
[16] 趙洪光. 輥式玉米摘穗秸稈切碎裝置的研制[D]. 淄博:山東理工大學,2005.
Zhao Hongguang. Development of Roller Corn Ear Picking and Straw Chopping Device[D]. Zibo: Shandong University of Technology, 2005. (in Chinese with English abstract)
[17] Quaye S A, Schertz C E. Corncob harvest with counter-rotating rollers[J]. Transactions of the ASAE, 1983, 26(5): 1303-1307.
[18] 耿端陽,李玉環,孟凡虎,等. 玉米收獲機多棱立輥式摘穗裝置設計與試驗[J]. 農業機械學報,2017,48(3):84-91.
Geng Duanyang, Li Yuhuan, Meng Fanhu, et al. Design and experiment of corn harvester polygonal vertical-rollers snapping means[J] Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 84-91. (in Chinese with English abstract)
[19] 耿端陽,何珂,王騫,等. 橫軸流式玉米柔性脫粒裝置設計與試驗[J]. 農業機械學報,2019,50(3):101-108.
Geng Duanyang, He Ke, Wang Qian, et al. Design and experiment on transverse axial flow flexible threshing device for corn[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(3): 101-108. (in Chinese with English abstract)
[20] 耿端陽,李玉環,何珂,等. 立輥式玉米收獲機割臺間隙夾持輸送裝置設計與試驗[J]. 農業機械學報,2017,48(11):130-136.
Geng Duanyang, Li Yuhuan, He Ke, et al. Design and experiment on gripping delivery mechanism for vertical-rollers type of corn harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(11): 130-136. (in Chinese with English abstract)
[21] 張宗玲,韓增德,劉立晶,等. 玉米穗莖兼收摘穗臺夾持輸送裝置參數優化[J]. 農業機械學報,2018,49(3):114-121.
Zhang Zongling, Han Zengde, Liu Lijing, et al. Parameters optimization for gripping and delivering device of corn harvester for reaping both corn stalk and spike[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(3): 114-121. (in Chinese with English abstract)
[22] 耿端陽,張道林,李清華,等. 玉米收獲機撥禾導向裝置技術參數的試驗研究[J]. 農業工程學報,2012,28(增刊1):45-49.
Geng Duanyang, Zhang Daolin, Li Qinghua, et al. Experimental study on technical parameters of raking and conveying device of corn harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp.1): 45-49. (in Chinese with English abstract)
[23] 耿端陽,王騫,鹿秀鳳,等. 基于激振理論的玉米多棱摘穗輥設計與試驗[J]. 農業機械學報, 2019,50(5):124-132.
Geng Duanyang, Wang Qian, Lu Xiufeng, et al. Design and experiment on vertical polygonal roller snapping ears of corn harvester based on excitation theory[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(5): 124-132. (in Chinese with English abstract)
[24] 朱余清,洪添勝,吳偉斌,等. 山地果園自走式履帶運輸車抗側翻設計與仿真[J]. 農業機械學報,2012,43(S1):19-23.
Zhu Yuqing, Hong Tiansheng, Wu Weibin, et al. Design and simulation of side rollover resistant capability of tracked vehicle for mountain orchard[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(S1): 19-23. (in Chinese with English abstract)
[25] Cox W J, Hanchar J J, Knoblauch W A, et al. Growth, yield, quality, and economics of corn silage under different row spacings[J]. Agronomy Journal, 2006, 98(1): 163-167.
[26] 董新建. 履帶車輛行動部分動力學分析與仿真[D]. 長沙:湖南大學,2007.
Dong Xinjian. The Dynamics Analysis and Simulation of Tracked Vehicles[D]. Changsha: Hunan University, 2007. (in Chinese with English abstract)
[27] 史麗晨,杜小淵,郭剛濤,等. 基于ADAMS的小型挖掘機轉盤軸承的摩擦力矩分析[J]. 軸承,2014(9):6-9.
Shi Lichen, Du Xiaoyuan, Guo Gangtao, et al. Analysis on friction torque for slewing bearings in mini excavator based on ADAMS[J]. Bearing, 2014(9): 6-9. (in Chinese with English abstract)
[28] 杜岳峰. 丘陵山地自走式玉米收獲機設計方法與試驗研究[D]. 北京:中國農業大學,2014.
Du Yuefeng. Design Method and Experimental Research on Self-Propelled Corn Harvester for Hilly and Mountainous Region[D]. Beijing: China Agricultural University, 2014. (in Chinese with English abstract)
[29] 施新. 自走式玉米聯合收獲機車身調平系統研究[D]. 長春:吉林大學,2017.
Shi Xin. Study on the Leveling System of the Body in a Self-Propelled Corn Combine Harvester[D]. Changchun: Jilin University, 2017. (in Chinese with English abstract)
[30] 秦嘉浩,劉海帆,Suhc S,等. 拖拉機動量飛輪主動防側翻控制與模型試驗研究[J]. 農業機械學報,2020,51(S2):515-520.
Qin Jiahao, Liu Haifan, Suhc S, et al. Tractor active anti-rollover control using momentum flywheel with experimental verification[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S2): 515-520. (in Chinese with English abstract)
[31] 徐立章,李耀明,孫朋朋,等. 履帶式全喂入水稻聯合收獲機振動測試與分析[J]. 農業工程學報,2014,30(8):49-55.
Xu Lizhang, Li Yaoming, Sun Pengpeng, et al. Vibration measurement and analysis of tracked-whole feeding rice combine harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(8): 49-55. (in Chinese with English abstract)
[32] 楊慶樂,屈福政,于志遠,等. 考慮基礎彈性的履帶式起重機回轉工況分析[J]. 大連理工大學學報,2019,59(2):146-153.
Yang Qingle, Qu Fuzheng, Yu Zhiyuan, et al. Analysis of swinging loads operating condition for crawler crane mounted on elastic foundation[J]. Journal of Dalian University of Technology, 2019, 59(2): 146-153. (in Chinese with English abstract)
[33] 李耀明,陳勁松,梁振偉,等. 履帶式聯合收獲機差逆轉向機構設計與試驗[J]. 農業機械學報,2016,47(7):127-134.
Li Yaoming, Chen Jinsong, Liang Zhenwei, et al. Design and experiment of differential steering mechanism for track combine harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 127-134. (in Chinese with English abstract)
[34] 金誠謙,楊騰祥,劉崗微,等. 履帶式聯合收獲機全向調平底盤設計與試驗[J]. 農業機械學報,2020,51(11):393-402.
Jin Chengqian, Yang Tengxiang, Liu Gangwei, et al. Design and test of posture controlled chassis for caterpillar combine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(11): 393-402. (in Chinese with English abstract)
[35] 葛宜元. 試驗設計方法與Design-Expert軟件應用[M]. 哈爾濱:哈爾濱工業大學出版社,2014:155-164.
[36] 徐中儒. 回歸分析與試驗分析[M]. 北京:中國農業出版社,1998.
Design and experiment of crawler corn harvester for sloping fields
Geng Duanyang1, Sun Yancheng1, Li Huabiao1, Mou Xiaodong1, Zhang Guodong1, Wang Zongyuan1, Lu Xiufeng2
(1.,255000,;2.272000,)
In view of the fact that small plots and more slope plots restrict corn mechanized harvesting in hilly region of China, a crawler corn harvester was designed to realize corn mechanized harvesting under complex terrain conditions in hilly region. In order to ensure the ear-catching rate, the key parameters were designed and the optimal parameters combination was obtained that the diameter of the ear picking roller is 82 mm, the height of the spiral ridge on the surface of the ear picking roller is 8-15 mm, the length of the long ear picking roller is 50-60 cm, and the spiral angle of the ear picking roller is 20.79°. It can solve the feeding problems of corn plant in the complex terrain and the unsmooth feeding performance of traditional ear-picking roller, increase the feeding amount of header, and effectively shorten the length of the whole machine by about 0.5-1.2 m. Through structure simplification and mechanical analysis, it was concluded that the turnover of corn harvester working on the slope is related to the gravity position and the track span, and the turnover angle becomes smaller with the increase of the center of gravity of the equipment, that is, the turnover risk is greater when working on the slope ground. Therefore, adjusting the width between the two tracks can increase the safety range of gravity variation of the whole machine, reduce the rollover risk of the machine working on the slope. The running stability of the whole machine in the complex terrain conditions can be improved by 27.34% when the width between the two tracks expands with 0.8 m. The hydraulic system of 10 t engineering vehicle was used to solve the problem of driving load in slope operation and the resistance in harvesting operation, which will directly affect the function of the whole machine in the field, such as walking, overtaking and steering. Based on the principle of hydraulic control, a two-way operation control system was developed, which can meet the turning and turning requirements in small plots such as mountains and hills, and improve the turning efficiency of the whole machine by more than 90%. Zhengdan 958 maize cultivars with grain moisture content of 33.5%, stem moisture content of >89% and fruit stalk moisture content of >52% were selected to test ear loss rate. The assessment indices of influencing factors of ear loss rate were determined by orthogonal test, including machine forward speed, ear picking roller clearance and ear picking roller speed. The mathematical regression model between the influencing factors and indicators was established by using Design Expert, and through the analysis of variance to verify the significance of the assessment indicators, the best combination of operation parameters was determined that the forward speed of the machine is 2 km/h, the clearance of the ear picking roller is 14 mm, and the speed of the ear picking roller is 1 000 r/min. Under the optimal combination of the operation parameters, the ear loss rate was 1.25%. The design indicators of the machine can meet the relevant national standards, and can satisfy the needs of corn mechanized harvesting in hilly and mountains region.
corn; harvester; hilly and mountains region; transverse roll header; anti rollover structure; two-way operation
耿端陽,孫延成,李華彪,等. 履帶式坡地玉米收獲機設計與試驗[J]. 農業工程學報,2021,37(13):11-19.
10.11975/j.issn.1002-6819.2021.13.002 http://www.tcsae.org
Geng Duanyang, Sun Yancheng, Li Huabiao, et al. Design and experiment of crawler corn harvester for sloping fields[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(13): 11-19. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.13.002 http://www.tcsae.org
2021-03-14
2021-05-07
山東省農業重大應用技術創新項目(SD2019XM001)和山東省農機裝備研發創新計劃項目(2017YF004)
耿端陽,教授,博士生導師,研究方向為新型農業機械裝備開發研究。Email:dygxt@sdut.edu.cn
10.11975/j.issn.1002-6819.2021.13.002
S2225.5*1
A
1002-6819(2021)-13-0011-09
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08