基于單片有源像素傳感器的探測模塊測試研究*
2021-09-17 06:08:38楊生輝董明義渠超越田興成董靜吳冶馬驍妍章紅宇江曉山歐陽群李嵐坤鄭國恒
物理學報 2021年17期
關鍵詞:信號
楊生輝 董明義 渠超越 田興成 董靜 吳冶馬驍妍 章紅宇 江曉山 歐陽群 李嵐坤 鄭國恒
1) (鄭州大學物理學院(微電子學院), 鄭州 450001)
2) (中國科學院高能物理研究所, 核探測與核電子學國家重點實驗室, 北京 100049)
3) (中國科學院大學, 北京 100049)
硅像素探測器因具有優異的空間分辨率、極高的耐計數能力和較低的功耗等優點, 近年來已被廣泛應用于高能對撞機實驗的頂點探測器和內徑跡探測器.基于MIMOSA28芯片的硅像素探測器研究是北京譜儀Ⅲ漂移室內室的升級預研方案之一, 該方案計劃建造一個漂移室內室1/10規模的模型.探測模塊是該模型的基本探測單元.為了對探測模塊的性能進行研究, 搭建了實驗室測試系統.該系統主要由五層探測模塊、讀出電子學系統以及數據獲取系統組成.本文圍繞帶有觸發標記的連續數據讀出方法的實現、探測模塊的噪聲水平和放射源響應測試以及擊中位置重建算法研究展開.測試結果驗證了探測模塊工作性能良好, 觸發讀出邏輯正確, 而且重建算法準確有效, 為后續探測模塊性能的進一步研究奠定了基礎.
1 引 言
基于互補金屬氧化物半導體(complementary metal oxide semiconductor, CMOS)[1]工藝的像素傳感器, 具有極高的空間分辨(可達幾μm)、計數率(108Hz/cm2)和探測效率(約100%), 良好的抗輻照性能以及可在室溫下工作等特點, 近二三十年在高能物理實驗中得到迅速發展, 成為頂點探測器和徑跡探測器的主要技術.并且, 由于采用高度工業化的CMOS標準工藝及先進光刻技術, 并借助電子設計自動化(electronic design automation,EDA)[2]工具, 可以縮短像素傳感器芯片的研發周期, 降低其研制成本.目前, 美國相對論重離子對撞機(relativistic heavy ion collider, RHIC)上的STAR實驗[3,4]已采用此類型芯片成功升級了其頂點探測器, 歐洲核子中心(European Organization for Nuclear Research, CERN)大 型 強 子 對 撞 機(large hadron collider, LHC)[5]上的ALICE[6]實驗也選擇了CMOS像素傳感器(稱為ALPIDE)[7]對其內徑跡探測器系統(inner tracking system,ITS)進行升級[8].在國內高能物理領域, 硅像素探測器的研究和應用也在積極開展[9,10].其中, 為了對北京正負電子對撞機Ⅱ(Beijing electron positron collider Ⅱ, BEPCⅡ)[11]上的高精度通用探測器—北京譜儀Ⅲ(Beijing spectrometer Ⅲ, BESⅢ)[12]的主漂移室(multilayer drift chamber, MDC)內室進行升級改造, 提出了采用單片式有源像素傳感器(monolithic active pixel sensor, MAPS)[13,14]建造1/10內室規模的硅像素探測器模型的升級預研方案.MAPS的傳感器和專用讀出電子學集成在同一塊芯片上, 有利于降低探測器的物質的量, 減小多次散射, 從而提高帶電粒子徑跡的測量精度.預研方案采用法國IPHC(Institute Pluridisciplinaire Hubert Curien)研制的MIMOSA28芯片[15],其空間分辨率可達到3.5—4.0 μm, 計數能力可達106Hz/cm2[16], 遠高于漂移室內室的最大事例率(約為4 kHz/cm2)[12], 完全滿足BESⅢ 漂移室內室升級的要求.
探測模塊是硅像素探測器的基本單元, 其性能的測試研究在探測器研制過程中非常關鍵.本文介紹探測模塊性能研究測試系統, 在此系統上, 對探測模塊芯片的噪聲水平進行測試研究; 同時, 為了實現探測器模型不同模塊間的事例對齊, 研究并實現了帶觸發(trigger)標記的數據連續讀出的方法;通過對探測模塊的放射源測試, 研究了探測模塊的響應性能以及粒子擊中位置重建算法.該研究為后續進一步測試探測模塊以及探測器模型的性能奠定了基礎.
2 實驗測試系統
圖1為測試系統示意圖, 主要包含三個部分:五層探測模塊, 讀出電子學系統和數據獲取系統(data acquisition, DAQ).
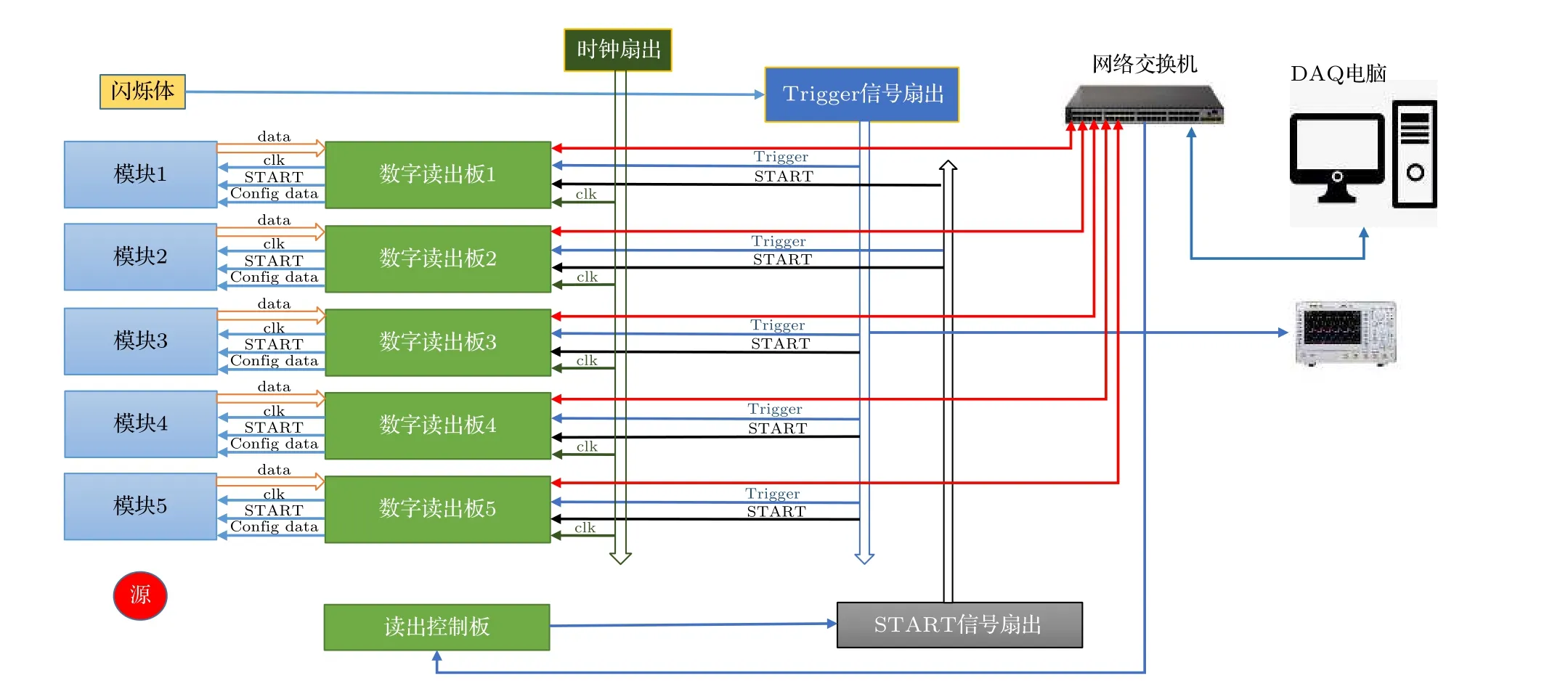
圖1 實驗室測試系統裝置示意圖Fig.1.Schematic of the experimental setup in the laboratory.
五層探測模塊平行放置, 其間距設置值是影響探測模塊空間分辨率測量精度的一個重要參量.隨著探測模塊間距的增大, 當帶電粒子穿過探測模塊時, 受多次庫侖散射的影響, 徑跡偏轉程度(L)增大, L計算公式為

其中d表示相鄰探測模塊的間距, θ0表示帶電粒子穿過探測模塊時散射角的平均值, 可用Highland公式[17]描述:

其中, βc和p分別表示入射粒子的速度和動量,Z表示入射粒子的電荷量, x/X0為探測模塊的物質的量.L的增大將會導致粒子徑跡重建精度降低, 從而影響探測模塊的空間分辨率.因此, 探測模塊的間距需盡可能小, 但考慮到探測模塊的元器件高度和安裝操作空間的要求, 將兩個探測模塊之間的間距設置為20 mm.
2.1 探測模塊
探測模塊的設計在滿足核心功能的基礎上, 還滿足低物質的量和高強度的要求, 從而減少多次庫侖散射, 提高測量精度.探測模塊的結構如圖2所示, 10片減薄至50 μm的MIMOSA28芯片緊密排布在kapton柔性電纜上, 柔性電纜和芯片之間通過打線(wire bonding)實現電氣連接.碳纖維復合板位于探測模塊的最底層, 為探測模塊提供穩定的機械支撐.MIMOSA28芯片、柔性電纜和碳纖維復合板之間通過丙烯酸酯膠粘接成一個整體.
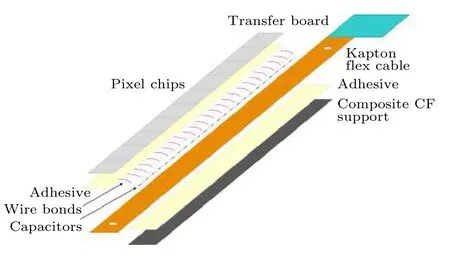
圖2 探測模塊結構Fig.2.Structure of the detector module.
MIMOSA28芯片是由法國IPHC研究所設計的基于標準0.35 μm CMOS工藝的芯片.該芯片在高阻襯底上生長外延層作為靈敏層, 外延層厚度為15 μm, 電阻率為400 Ω·cm.芯片尺寸為20.22 mm × 22.71 mm, 像素陣列 為928(行) ×960(列), 像素尺寸為20.7 μm.芯片的每個像素包括一個放大器和一個相關雙采樣電路(correlated double sampling, CDS)[18], 并且在每一列底部還配有一個甄別器, 用于將模擬信號轉化為數字信號(0或1, 即像素是否被擊中著火).芯片采用逐行掃描的讀出方式, 按幀格式輸出數據.為了保證數據的連續輸出, 該芯片引入了獨特的內存管理機制, 采用兩個存儲模塊用來交替存儲和輸出數據,每幀讀出時間為185.6 μs[15].
2.2 讀出電子學系統和數據獲取系統
讀出電子學系統由數字讀出板、讀出控制板、START信號扇出板、Trigger信號扇出板以及時鐘扇出板等部分組成, 如圖1所示.探測模塊通過Samtec高速電纜與數字讀出板連接.數字讀出板以Xinlinx公司的XC7K325T-2FFG676型現場可編程邏輯門陣列(field programmable gate array,FPGA)芯片[19]作為核心控制器, 負責配置芯片的工作參數, 產生MIMOSA28芯片的工作時鐘, 同時接收探測模塊上的MIMOSA28芯片輸出的數字信號并進行解析、對齊、串并轉換、重新組裝等操作.組裝后的數據在芯片數據(chip data)的基礎上添加了探測模塊的標志信息(ladder flag)、模塊觸發號(ladder trigger count)、模塊幀號(ladder frame count)、模塊數據長度(ladder data length)、模塊數據結尾(ladder data end)和芯片的標志信息(chip flag), 構成的數據包格式如圖3所示.數據包采用TCP/IP協議, 通過千兆以太網傳輸到DAQ進行離線存儲.

圖3 探測模塊的數據經FPGA處理后的格式Fig.3.Format of the data of the detector module processed by FPGA.
讀出控制板接收來自DAQ發送的啟動和停止取數的控制命令, 并根據這個命令產生啟動(START)或停止(STOP)信號, 然后通過START信號扇出板輸出到每個探測模塊的數字讀出板, 控制每個數字讀出板的起始與停止狀態.塑料閃爍體計數器將粒子穿過閃爍體產生的光信號通過光電轉換等處理轉變為脈沖信號, 該脈沖信號在Trigger信號扇出板內經過處理后變成數字信號, 然后扇出到每個探測模塊的數字讀出板, 作為觸發信號被FPGA接收并處理.時鐘扇出板生成100 MHz的同步時鐘信號用于同步每個數字讀出板的工作狀態.
DAQ采用慢控制協議發送啟動和停止指令以控制數據讀取的進程, 同時通過用戶數據報協議(user datagram protocol, UDP)傳輸探測模塊上的MIMOSA28芯片的配置數據和電子學的配置數據.DAQ還通過TCP/IP協議接收數字讀出板發出的數據包, 并將它們存儲到硬盤上以用于離線分析.
2.3 帶觸發標記的連續讀出方法
由MIMOSA28芯片的逐行掃描機制和內存管理機制[15]可知, 當帶電粒子擊中芯片使像素著火時, 若擊中位置位于當前掃描位置之后, 則本次掃描可以記錄著火像素的信息, 正在存儲的這一幀數據(第m幀)就是當前擊中所對應的數據; 若擊中位置位于掃描位置之前, 則本次掃描無法記錄該著火像素的信息, 該著火信息將在下一次掃描中記錄, 則下一次掃描存儲的數據(第m+1幀)為本次擊中事例對應的數據, 因此對每個擊中事例, 理論上需要分析連續兩幀(第m幀和第m+1幀)數據以找到對應的擊中信息.
為了確保不丟失數據, 同時又能實現探測器模型中不同模塊的事例對齊, 研究并實現了帶有觸發標記的連續讀出方法.連續讀出的流程如圖4所示.
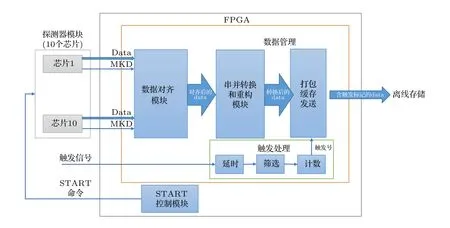
圖4 連續讀出流程Fig.4.Process of continuous readout.
啟動讀數進程之后, 探測模塊上10個芯片同時輸出數據.由于探測模塊上芯片的位置與數據讀出模塊的距離不相等, 數據并不是嚴格地同時到達FPGA.為了保證能夠正確對數據進行重構, 在START命令發出后, FPGA先以MIMOSA28芯片的信號標記位(MKD)作為每幀數據的起始標志, 接收每個MIMOSA28芯片傳來的數據, 然后根據每個芯片MKD的到達時間對先到的芯片數據進行延時(一般為1個時鐘周期), 從而將10個芯片數據對齊.對齊后的芯片數據在FPGA內部進行串-并轉換和重構操作.與此同時, 通過計算找到觸發信號與對應數據幀的MKD的時間關系.當系統判斷接收到了有效觸發信號, 觸發號加1, 并根據預先計算出的時間關系找到該觸發對應的數據幀, 將觸發號添加到數據幀里, 從而使數據與觸發對應起來.如果沒有接收到觸發信息, 也將在數據幀里添加觸發號, 但觸發號不變.通過這樣的方式既實現了數據的連續讀出, 又保證了觸發與數據的對應關系, 實現了探測器模型不同模塊間的事例對齊, 便于后續的數據分析.
3 測試與分析
3.1 觸發邏輯測試
為了驗證觸發讀出邏輯的正確性, 采用信號發生器產生的脈沖信號(頻率為5 kHz, 幅度為–600 mV, 脈寬為100 ns)作為觸發信號, 同時對五層探測模塊進行測試, 每個模塊都獲取200萬幀的數據.圖5為測試結果, 其中橫坐標為觸發號,縱坐標為每次觸發模塊2—模塊5的數據幀號分別與模塊1的數據幀號相減得到的值.根據測試結果, 不同探測模塊的數據中, 每次觸發對應的數據幀號隨機出現相等或差值為1的情況, 這是由于觸發扇出板所扇出的信號實際上不是理想對齊的信號, 并且由于線路延時的影響, 觸發信號到達FPGA的時間有細微差別, 在邏輯判斷時, 觸發號變化會有先后順序, 時間間隔為納秒級(遠小于數據幀的間隔185.6 μs).當觸發號在兩幀數據交界附近變化時, 在FPGA內進行觸發號寫入, 可能會出現同一觸發號寫在不同的兩幀(幀號連續)數據上, 從而導致同一觸發號對應的幀號差值出現1.但考慮到讀出及觸發標記機制(2.3節)、硬件延時固定的因素, 即使在下一幀數據中觸發號又發生了變化, 該觸發號對應的幀號最多差1或恢復為0,不會出現差2或不斷增加的情況.結合MIMOSA28芯片的內存管理機制, 若每個事例都取連續三幀(有效觸發對應的前一幀, 當前幀和后一幀)的數據進行分析, 上述幀號差1的情況將不會造成數據丟失, 并且能夠實現不同模塊間的事例對齊.
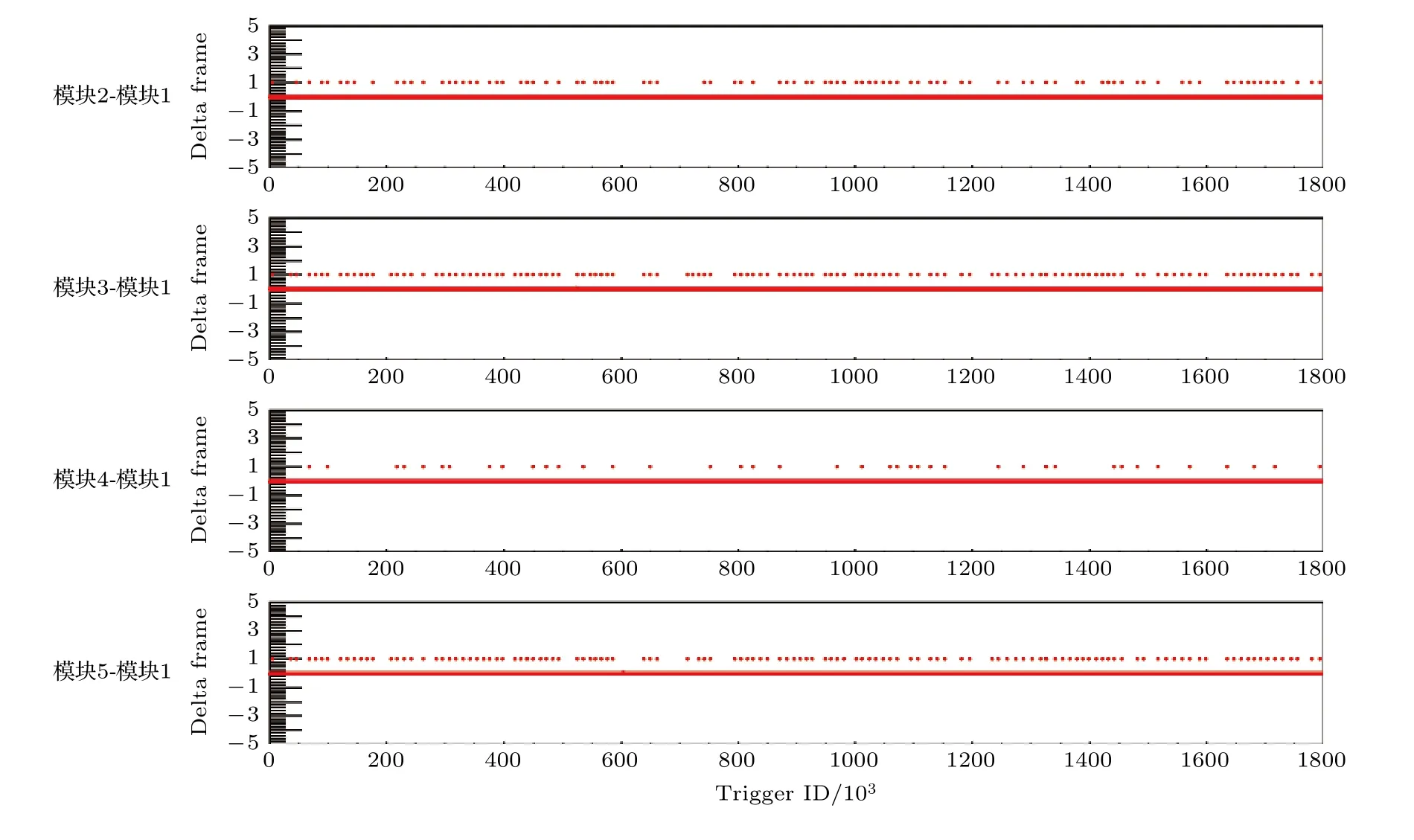
圖5 每次觸發模塊2—模塊5對應的數據幀號與模塊1對應的數據幀號的差值Fig.5.Difference of the frame number between module 2– module 5 and module1 corresponding to the same event (trigger).
3.2 噪聲測試
3.2.1 閾值掃描
噪聲水平是探測模塊的一個重要的參數, 通過芯片甄別器的閾值掃描可以獲取探測模塊上芯片的噪聲水平.設置合適的甄別器閾值可以有效降低芯片的噪聲計數, 同時又能保證探測模塊不損失效率.室溫下將芯片每列的甄別器設置不同的閾值,測試芯片像素在不同閾值下的噪聲響應, 以獲得芯片的傳輸曲線、暫態噪聲(temporal noise, TN)、固定模式噪聲(fixed pattern noise, FPN)以及甄別器DAC的參考值等.DAC的掃描范圍為0—255, 掃描步長為5.對芯片所有列的噪聲傳輸曲線采用正態分布的累積分布函數進行擬合.正態分布的累積分布函數為

其中P0, P1, P2均是擬合參數, e rfc(x) 的定義為

將P1和P2分別填入直方圖, 使用高斯函數擬合后得到傳輸曲線的均值(Mean)和標準差(Sigma)分布直方圖如圖6所示, 其中Mean分布圖的Sigma值代表每列甄別器閾值不一致性, 為FPN; Sigma分布圖的Mean值為芯片的TN.
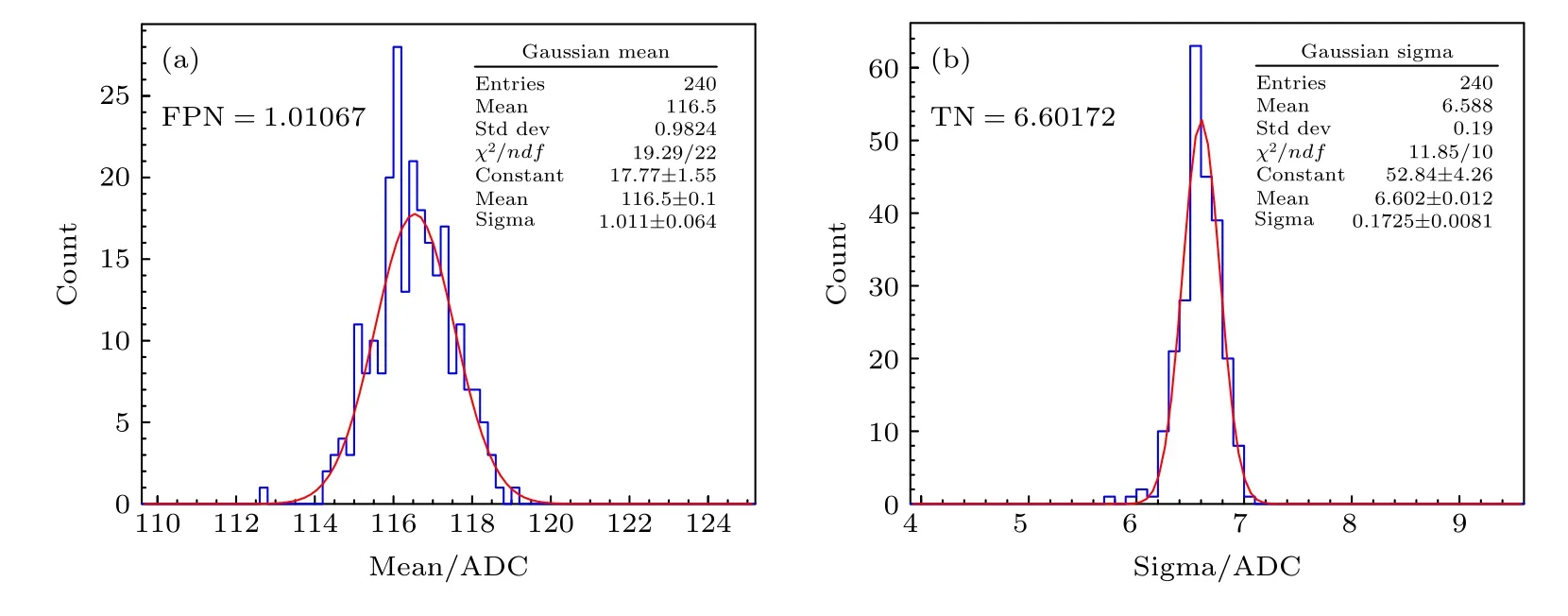
圖6 探測模塊的噪聲水平(1 ADC=0.25 mV) (a) 傳輸曲線的Mean值分布(FPN為1.01067 ADC, 轉換成電壓值為0.253 mV);(b) 傳輸曲線的Sigma值分布(TN為6.60172 ADC, 轉換成電壓值為1.65 mV)Fig.6.Noise level of detector module (1 ADC unit = 0.25 mV): (a) Mean distribution of transmission curve (FPN is 1.01067 ADC,converted into the voltage is 0.253 mV); (b) Sigma distribution of transmission curve (TN is 1.01067 ADC, converted into the voltage is 1.65 mV).
芯片的噪聲(σ)定義為

而芯片的甄別器閾值可設置為

其中MeanFPN是Mean分布圖的Mean值.n的下限需要通過在無放射源的情況下測試不同閾值下芯片像素的誤擊中率(fake hit rate, FHR)來確定,芯片正常工作的最小閾值所對應的n值即為n的下限.n值的上限需要通過測試模塊的探測效率來確定, 標準為其對應的閾值不明顯影響探測模塊的探測效率, 這將在后續的束流測試中研究.
3.2.2 誤擊中率
FHR定義為

其中Number of frames為測試中獲取的數據幀數,Number of pixels為芯片像素數, Fired pixels代表測試中著火像素的總數.
在不同閾值條件下測得FHR隨閾值的變化如圖7所示.可以看出, 芯片的誤擊中率隨著閾值的增大呈下降趨勢, 閾值設置為4σ及以上時(n ≥ 4),每幀每個像素的誤擊中率低于 1 0?5, 在該閾值下,芯片的噪聲不會對探測模塊的效率產生影響.
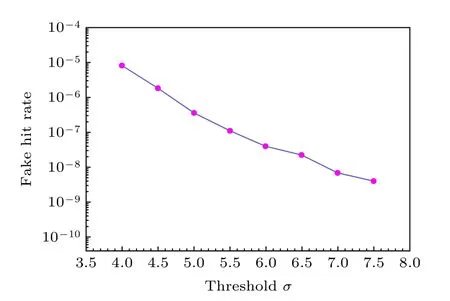
圖7 誤擊中率隨閾值的變化Fig.7.FHR as a function of the threshold.
3.3 探測模塊響應和成像性能測試
為了驗證探測模塊的功能是否正常, 根據閾值掃描和誤擊中率測試的結果對MIMOSA28芯片的甄別器設置合適的閾值 M eanFPN+4σ , 并用90Sr放射源對5層探測模塊進行了響應測試.
放射源放置在第五層模塊的前方, 電子束經準直圓孔后連續穿過5層探測模塊, 最后進入第一層后方的閃爍體計數器, 閃爍體計數器的輸出信號作為五層探測模塊的觸發信號.在進行擊中挑選時,根據3.1節的觸發邏輯測試結果, 分析每次觸發對應的前一幀和后兩幀的數據.五層探測模塊的擊中挑選結果如圖8所示.可以看到, 距離放射源最近的模塊5和模塊4上有一個明顯的亮斑, 這是電子通過準直圓孔在芯片上所成的像, 另外由于90Sr衰變產生的電子能量較低, 受多次庫侖散射的影響,距離放射源越遠的探測模塊, 擊中數目逐漸變少,因此準直孔的像逐漸變得模糊.但距離放射源最遠的模塊1上也顯示出一個近似圓形的陰影, 這是由于產生觸發信號的閃爍體距離模塊1最近, 模塊1上擊中粒子的位置受觸發閃爍體位置和尺寸的影響最大, 該陰影代表了閃爍體的位置和尺寸.此測試結果表明探測模塊能夠正常工作, 且成像性能良好.

圖8 五層探測模塊擊中挑選結果(右側色溫表給出像素被擊中的次數)Fig.8.Hit selection of the five-layer detection module (The rainbow indicates the number of times a pixel being hit).
3.4 擊中重建算法
3.4.1 Charge sharing效應
由于MIMOSA28芯片的PN結工作在非耗盡模式下, 帶電粒子穿過MIMOSA28芯片的靈敏區所產生的電子-空穴對通過熱擴散的方式被周圍的數個像素收集, 使像素著火, 形成簇團, 這就是電荷分享效應[20].相比于每次事例僅有單個像素著火的情況, 利用著火簇團的信息重建粒子在芯片上的擊中位置有利于提高芯片的空間分辨率.由于MIMOSA28芯片輸出數字信號, 只能獲得像素是否著火的信息, 在進行擊中位置重建時所有著火像素是平權的, 我們研究了不同算法如相鄰法和比較法來重建簇團的幾何中心從而重建粒子在芯片上擊中位置.
3.4.2 重建算法——相鄰法和比較法
相鄰法的實現流程如圖9所示, 其中白色方塊表示未著火的像素, 藍色方塊表示著火但未被標記的像素, 黃色方塊表示著火且標記過的像素.按照圖9(a)—圖9(d)的順序, 首先確定一個著火像素,將其標記為hit_1, 以這個像素為基準尋找其周圍(上下左右)相鄰的著火像素, 同樣標記為hit_1,然后再以相鄰像素為基準, 繼續尋找周圍的相鄰著火像素, 一直迭代下去直到找完hit_1的所有相鄰的著火像素, 再依據中心法把hit_1的著火像素坐標重建為擊中位置, 然后重復hit_1著火像素尋找及擊中位置重建的過程, 尋找并重建該幀數據中其他擊中信息(hit_2, hit_3, ……).
比較法是將所有著火像素的行列坐標放入數組, 遍歷數組中的像素, 將每一個像素與它之后的所有像素兩兩比較, 若比較判斷兩個像素相鄰則有四種情況, 如圖10所示, 方塊顏色的含義同圖9.
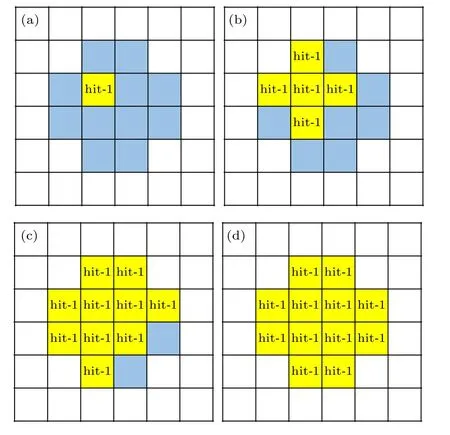
圖9 相鄰法實現流程圖Fig.9.Flow chart of adjacent method.
若兩個像素都未標記, 則新建一個標記, 將它們標記為hit_1, 如圖10(a)所示; 若兩個像素一個有標記(標記值為hit_i)另一個未標記, 則將未標記的像素標記為hit_i, 如圖10(b)所示; 若兩像素的標記值相等, 則不需處理, 如圖10(c)所示; 若兩像素標記值不同(標記值分別為hit_j, hit_k,且j < k), 則將標記值為hit_k的像素全標記為hit_j, 如圖10(d)所示.像素遍歷完畢之后, 根據中心法分別把標記號相同的著火像素重建成坐標.
假設每個擊中的簇團有M個著火像素, 一幀數據中有N個擊中, 則兩種算法的復雜度如表1所列.

表1 兩種算法的復雜度比較Table 1.Comparison of the complexity of the two algorithms.
采用90Sr放射源測試兩種算法, 得到的cluster size分析結果相同, 如圖11所示, 驗證了cluster重建算法的有效性.從圖11中可以看出, 每個擊中所引起的著火像素數的平均值為2.562.在M =2.562的情況下, 經分析計算, 當N ≥ 4時, 相鄰法能夠更快地找到所有著火像素, 反之比較法更快.

圖11 90Sr放射源測試得到芯片上cluster size的分布Fig.11.Cluster size distribution on the chip tested by 90Sr source.
4 結 論
本文在實驗室測試環境下, 對硅像素探測模塊的性能進行了測試研究.通過探測模塊上芯片的噪聲水平測試, 測得其固定模式噪聲為0.253 mV, 瞬態噪聲為1.65 mV, 芯片閾值為4σ及以上時(n ≥4), 每幀每個像素的誤擊中率低于 1 0?5, 這種情況下噪聲對探測模塊的影響可以忽略.為了實現不同探測模塊的事例對齊, 研究并實現了包含觸發標記的MAPS數據連續讀出方法, 測試結果表明讀出邏輯正確, 可用于實現探測器模型中不同模塊的事例對齊.此外, 對芯片的擊中重建算法進行了研究,90Sr放射源的電子引起的著火像素數的平均值為2.562, 在這個值下, 當每幀擊中數目大于或等于4時, 相鄰法能夠更快地找到所有著火像素, 反之比較法更快.測試結果表明, 探測模塊和讀出電子學系統工作正常, 噪聲水平符合預期, 該研究為后續在束流上進一步測試研究奠定了基礎.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06