高穩定度守時系統設計
2021-09-23 01:53:26劉朕智世鵬丁曉陽
電子技術與軟件工程 2021年14期
劉朕 智世鵬 丁曉陽
(中國電子科技集團公司第五十四研究所 河北省石家莊市 050000)
精準的時間是同步的基礎,同步是數字通信的基礎[1]。隨著數字化處理技術的發展,在無線通信、數字采集以及控制系統等領域中,對時間的同步精度要求越來越高[1-3]。由于北斗衛星中所搭載的原子鐘可提供高精度的時間,因此,北斗授時已逐漸成為低成本高精度授時的首選方案。
但北斗高精度授時需要時刻接收衛星信號,給使用場景帶來了較大的限制,本文利用北斗授時結合高精度守時算法,設計了高穩定守時系統,實現了在北斗無信號情況下的低成本高精度授時。
1 系統的組成與工作原理
1.1 系統組成
高穩定守時系統分為整體上分為三部分:北斗接收機部分、守時模塊部分和電源部分。其中,北斗接收機完成北斗信號解析,獲取精準的北斗時間,用于給守時模塊進行授時和馴服。守時模塊部分用于北斗信號無效時的守時和對外授時。電源部分為整個系統提供各種需要的工作電源。系統的組成框圖如圖1所示。
1.2 工作原理
北斗接收機接收衛星信號,獲得電文中的精確時間信息,生成高精度1PPS脈沖信號和TOD時間信息,并輸送給守時模塊。
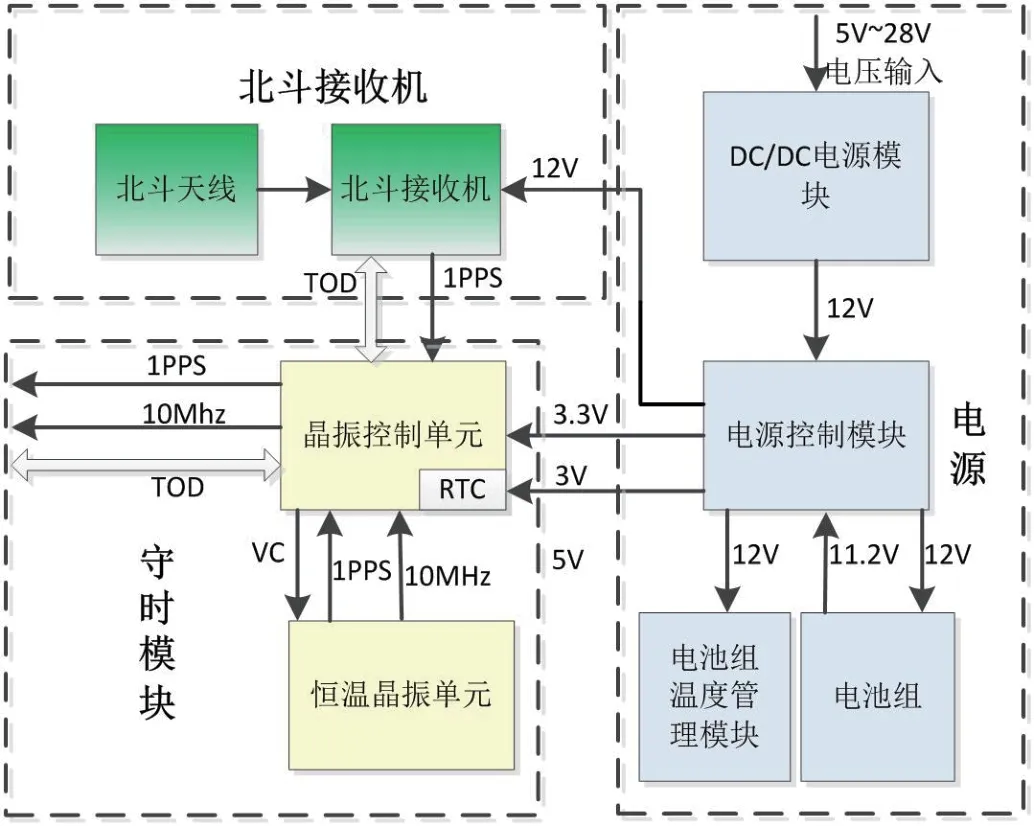
圖1:高穩定守時系統框圖
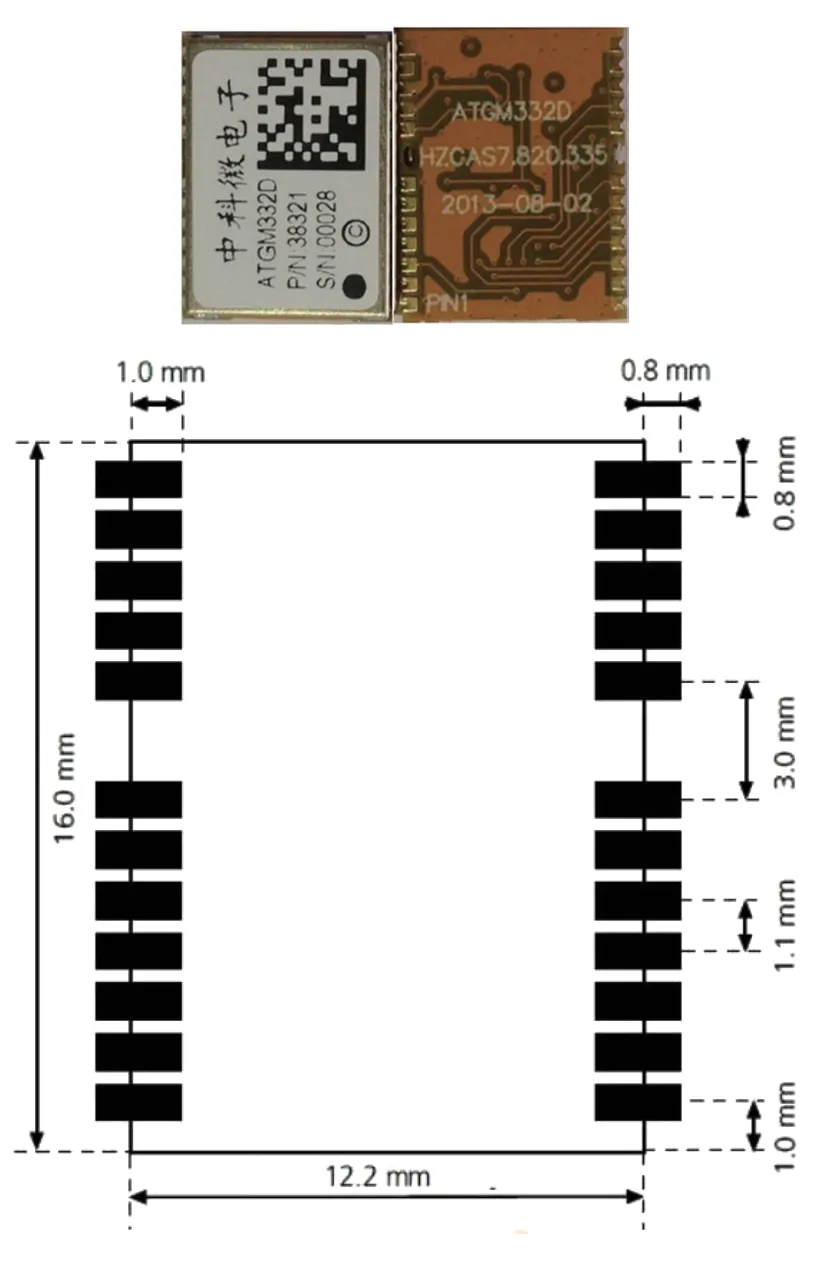
圖2:北斗接收機模塊實物及尺寸圖
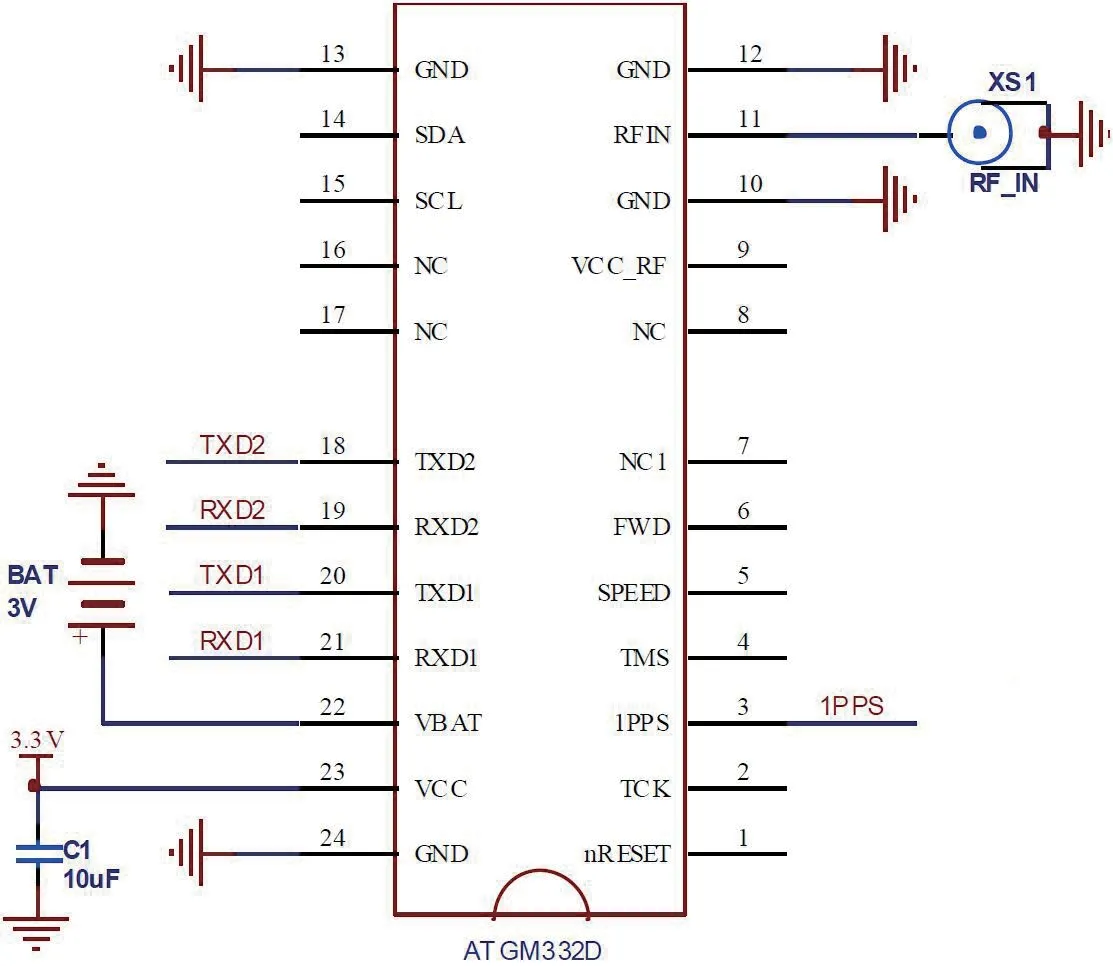
圖3:北斗接收機典型電路
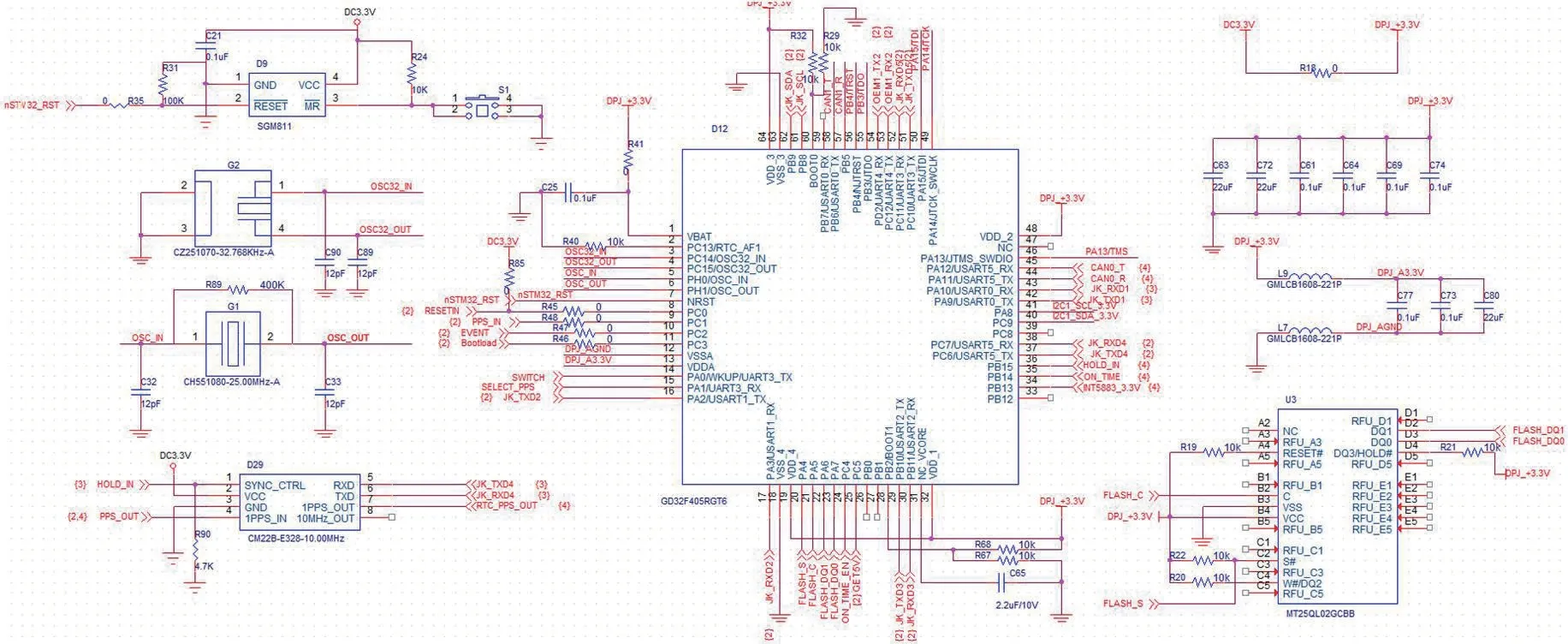
圖4:守時模塊電路原理圖

圖5:電源變換電路圖
守時模塊中的晶振控制單元測量北斗1PPS和晶振1PPS之間的誤差,建立晶振的漂移模型,并計算頻率修正值,通過調整電壓控制晶振的輸出頻率,完成對晶振的馴服。內部RTC用于粗略時間的保持,結合晶振的誤差模型及對晶振的頻率補償,獲得精確的1PPS秒信號,完成對高精度守時功能。
電源模塊中DC/DC電源對輸入電源進行電壓變換,電源控制模塊形成各模塊工作需要的電壓,并給電池組充電。電池組在外部電源斷開時,為整系統提供電源。實現證系統的斷電守時功能。電池組溫度管理模塊監控電池組溫度,在電池組溫度過低時啟動加熱,溫度過高時斷開充電電源或輸出電源,保證電池組的工作穩定性和安全性。
2 系統方案設計
系統的方案設計分為三部分:即北斗授時部分、守時模塊部分和電源部分。北斗授時部分以北斗接收機為主,使用北斗接收機獲得高精度1PPS秒脈沖信號和串口授時信號TOD,為守時部分提供時間基準。高穩守時部分以恒溫晶振和控制單元為主,控制單元通過晶振的壓控腳可調整晶振的輸出頻率,使晶振時刻輸出高精度的1PPS和10MHz的信號,實現高精度時間的保持。電源部分對輸入電源進行電壓轉換,為整個系統提供工作電源,保證整系統的電源特性。
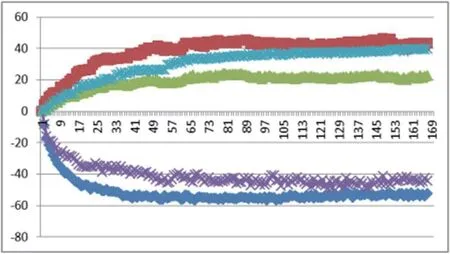
圖6:5只典型OCXO的7天老化曲線(橫坐標為時間,單位:hour,縱坐標為頻率變化量,單位:E-10)

圖7:OCXO精度曲線圖
2.1 北斗接收機設計
北斗授時部分采用ATGM332D 高靈敏度北斗/GPS 雙模接收機模塊,包含 32 個跟蹤通道,可以同時接收所有的 GPS 和北斗可見衛星。具有體積小,功耗低,成本低和靈敏度高的特點。北斗模塊的實物及尺寸如圖2所示。
北斗接收機模塊主要性能參數如下:
接收靈敏度:-160dBm。
授時精度:50ns。
平均功耗:700mW。
北斗接收機典型電路如圖3所示。
2.2 守時模塊設計
守時模塊是高穩守時系統的核心部分,在功能上分為恒溫晶振單元和晶振控制單元兩部分。
其中,恒溫晶振單元使用恒溫晶振OX36B-H-BR-V-10M作為核心,晶振控制單元輸出控制電壓VC施加到恒溫晶振的壓控管腳上,實現對晶振輸出頻率的調整。恒溫晶振單元中的PLL電路將晶振輸出的10MHz轉換成1Hz的1PPS秒脈沖信號,用于對外授時。
晶振控制單元解析北斗接收機輸入的TOD串口信號,得到年月日時分秒的信息,和北斗接收機的定位狀態,用于選擇是否繼續使用北斗1PPS馴服晶振。
晶振控制單元采集晶振輸出的1PPS和北斗1PPS之間的差值,對差值進行模型分析,建立晶振精度漂移的誤差模型,計算晶振頻率補償量,并轉換成電壓信號VC,輸出到晶振的壓控管腳,調節晶振輸出頻率,完成對晶振的馴服過程。
守時模塊電路圖如圖4所示。
2.3 電源設計
電源設計部分中DC/DC電源模塊使用市場上成熟的升降壓電源,電池組采用3節18650電池串聯,電源控制模塊將12V變換成各模塊需要的工作電壓。
電源部分電路原理圖如圖5所示。
2.4 晶振補償算法設計
本系統的設計指標為24小時守時精度30us,由守時精度與頻率準確度的關系如下式所示。

其中,ΔP:守時精度(ns),ΔF:頻率準確度(ppb),T:時間(s)。
可知,ΔF≤ΔP≤ /T=0.347(ppb)。即補償算法的頻率準確度閾值設置為0.3ppb。
晶體的頻率穩定性關于時間的數學模型可用下式表示:

其中,t為時間,T為溫度,A,B為常數,f0為晶體額定頻率。
由式(2)可知,OCXO的頻率特性主要體現為老化特性(時間特性)和溫度特性。一般情況下OCXO溫度特性曲線不具備單調性且每一只OCXO的溫度特性曲線都不一樣,因此器件選型時選用了恒溫晶振作為時鐘源,晶體工作中的溫度保持不變(在90℃左右),即可忽略溫度對OCXO的頻率影響,因此只需利用最小二乘法擬合老化特性中的常數A,B即可。晶體的老化特性曲線如圖6所示。
3 試驗驗證與分析
選擇兩套設備設計了對比試驗,其中第一套設備自由運行,驗證晶體的老化特性,即頻率漂移與時間的關系如圖7(左)所示,以及經北斗馴服2小時后,守時24小時期間精度隨時間變化的關系圖7(右)所示。
由圖可知,經過補償算法處理后,晶體的24小時守時精度可達到3us,而自由運行狀態下,24小時的精度只有600us。補償算法對精度的改進效果明顯。
對于大多數通信系統,1us的精度已能滿足時間同步需求,因此,該系統允許長達10小時的斷電情況存在。這也為該系統對便攜式應用提供守時成為可能。
4 結束語
隨著科學技術的發展,通信、導航、控制、航空等越來越多的領域需要精確的時間實現同步,授時和守時系統的應用也越來越廣泛[4]。尤其在高精度守時方面,由于原子鐘高昂的成本,難以在低成本領域內大規模使用,而成本相對較低的恒溫晶振應運而生[5]。因此,對恒溫晶振的特性研究和算法補償也越來越受到人們關注,具有非常重要的意義[6,7]。
高精度守時系統選用了恒溫晶振作為守時核心,恒溫晶振由于工作的溫度相對恒定,可盡量避免溫度對晶振頻率特性的影響,不僅保證了守時精度,而且簡化了晶振的數學模型,降低了補償算法的難度,通過2小時的北斗1PPS馴服,可達到24小時3us的守時精度,且具備斷電守時的能力,具有廣泛的應用前景。