分布式電動汽車橫擺穩(wěn)定性控制策略研究
2021-09-23 09:43:16王東
汽車實用技術 2021年17期
王 東
(長安大學汽車學院,陜西 西安 710064)
前言
分布式電動汽車采用新的底盤結構,極大地簡化了動力系統(tǒng),使整車輕量化具備了可行性,提高了能量利用率。采用多輪獨立驅動的方式,使各個獨立驅動的驅動輪之間既能相互獨立,又能根據整車控制要求進行協(xié)調控制。分布式電動汽車減少了噪聲源、振動源,在整車舒適性方面比傳統(tǒng)車更具優(yōu)勢[1]。由于分布式電動汽車具有以上的優(yōu)勢,使分布式電動汽車成為電動汽車結構中的一個重要分支[2]。分布式電動汽車與集中式純電動汽車相比取消了差速機構,需要重新對差速功能進行設計,實現(xiàn)方向穩(wěn)定性控制。通過對輪轂電機的轉矩控制,使得輪速和整車運動相協(xié)調,減少輪胎的滑移和滑轉,并且通過附加橫擺力矩的控制提高汽車行駛的穩(wěn)定性,增加適度的不足轉向特性從而改善汽車的操縱穩(wěn)定性[3]。
本文分析了穩(wěn)定性控制系統(tǒng)的基本模型,并搭建了雙層結構的電動汽車橫擺穩(wěn)定性控制系統(tǒng)模型。介紹了整車控制系統(tǒng)的結構框架和雙層控制系統(tǒng)中涉及的控制算法和設計原理,并完成雙層橫擺穩(wěn)定性控制系統(tǒng)的仿真工作。上層采用模糊控制來控制期望的附加橫擺力矩,下層采用基于附加橫擺力矩的驅動力差值分配到驅動電機上,實現(xiàn)橫擺穩(wěn)定性控制。在Carsim中建立了整車模型,以及在Simulink中建立了控制策略模型,搭建了Carsim/Simulink聯(lián)合仿真平臺,通過仿真試驗驗證控制策略的有效性。
1 多層結構的橫擺穩(wěn)定性控制策略
分布式電動汽車動力學控制的主要目標是實現(xiàn)汽車的運動特性,使理想汽車運動和實際汽車運動的誤差達到最小[4]。在該系統(tǒng)中,每層基于上層信號獨立運行,把其控制信號傳輸?shù)降讓又校刂茖舆€能接收傳感器和其他層的信號,如圖1所示。

圖1 多層分布式驅動電動汽車控制策略
上層控制器是根據之前所設立的期望橫擺角速度和期望質心側偏角,與車輛實際運動狀態(tài)的橫擺角速度和質心側偏角對比,通過二者的偏差得出所需要的附加橫擺力矩。當汽車進入不穩(wěn)定狀態(tài)時,汽車的期望狀態(tài)參數(shù)和實際運動狀態(tài)參數(shù)相差會比較大,這時就需要直接橫擺控制來使汽車保持穩(wěn)定行駛。上層控制的任務就是產生一個附加橫擺力矩ΔM,其橫擺力矩分別由橫擺角速度偏差和質心側偏角偏差得出[5]。下層控制器接收上層控制的附加橫擺力矩控制信號,然后通過調節(jié)左右驅動輪的轉矩達到控制車輛橫擺穩(wěn)定性的目的。當對不同驅動輪的轉矩進行調節(jié)所達到的控制效果不同,當汽車左轉發(fā)生過度轉向時應當增加左輪的驅動力矩,減小右輪的驅動力矩;當發(fā)生不足轉向時,應當減小左輪驅動轉矩,增大右輪驅動轉矩[6]。同理,當汽車右轉發(fā)生過度轉向時應當減小左輪的驅動力矩,增大右輪的驅動力矩;當發(fā)生不足轉向時,應當增大左輪驅動轉矩,減小右輪驅動轉矩。
2 線性二自由度車輛模型
采用二自由度整車模型對整車模型進行簡化,忽略汽車側傾運動、俯仰運動、垂直方向運動以及縱向車速恒定,只考慮汽車的橫擺運動和側向運動,如圖2所示,得到車輛運動微分方程:

圖2 線性二自由度車輛轉向模型
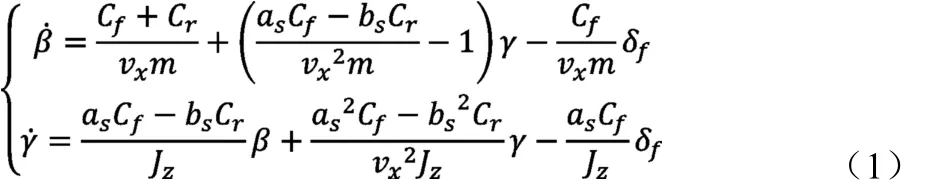
式中,β為質心側偏角(rad);γ為橫擺角速度(rad?s-1);Cf、Cr為前后軸側偏剛度(N?rad-1);vx為縱向速度(km?h-1);m為汽車質量(kg);as、bs為質心到前后軸的距離(m);δf為前輪轉角(rad);Jz為汽車繞Z軸的轉動慣量(km?m-2)。

公式(2)中車輛二自由度穩(wěn)態(tài)橫擺角速度γd1作為車輛期望橫擺角速度。當車輛運行在穩(wěn)態(tài)狀態(tài)時,一般將線性二自由度模型中期望質心側偏角為0。

當輪胎附著力超過輪胎附著極限時,此時地面給車輛提供的側向力較小不足以提供該橫擺角速度所需要的側向力,那么地面附著系數(shù)同樣限制車輛期望橫擺力矩[7]。可以按以下公式處理:

因此,車輛在穩(wěn)態(tài)和非穩(wěn)態(tài)下的期望橫擺角速度修正值如下:

通過對線性二自由度車輛轉向模型,得出了車輛期望的橫擺角速度和質心側偏角,同時考慮了地面附著條件的限制,充分考慮實際工況得出合理的橫擺角速度和質心側偏角控制目標[8]。
3 模糊控制橫擺穩(wěn)定性控制策略
本文把橫擺角速度和質心側偏角的實際響應與期望值的偏差er和eβ作為模糊控制器的輸入變量,把左右車輪轉矩差所產生的附加橫擺力矩ΔM作為輸出變量。
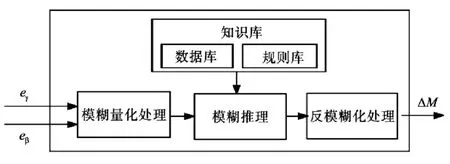
圖3 雙輸入單輸出模糊控制器
在本模糊控制器中的輸入變量,采用7個語言變量。對規(guī)范化后的橫擺角速度e(r)、質心側偏角e(β)以及附加橫擺力矩ΔM的模糊集以及論域定義如下:

其中NB為負大;NM為負中;NS為負小;ZE為零;PS為正小;PM為正中;PB為正大。
模糊控制規(guī)則能夠用語言的方法描述控制器輸入變量和輸出變量之間的模糊關系。就本文來說,模糊控制器控制規(guī)則的設計原則是:當誤差較大,控制量的變化應盡量使誤差迅速減小[8];當誤差較小時,除了要消除誤差以外,還要考慮系統(tǒng)的穩(wěn)定性,防止系統(tǒng)產生不必要的超調甚至振蕩,汽車橫擺力矩主要影響橫擺角速度。控制規(guī)則如表1所示。
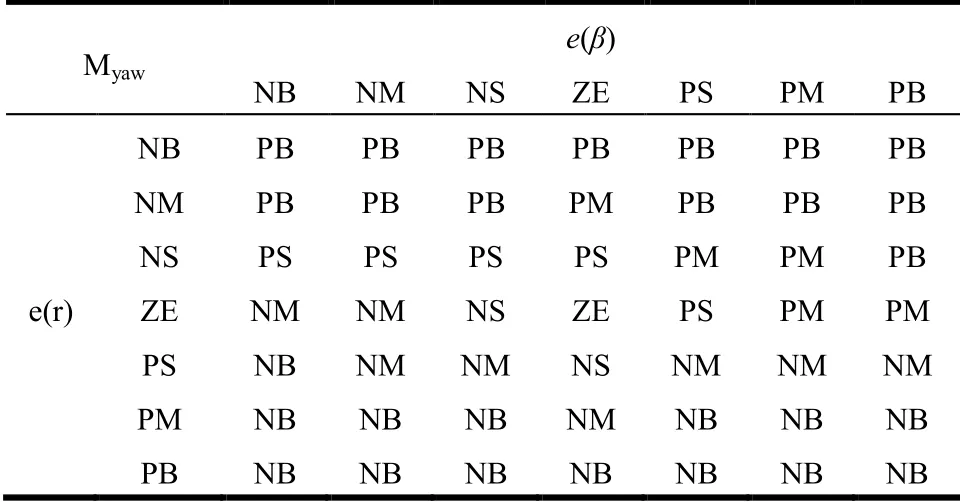
表1 模糊控制規(guī)則表
4 仿真結果
本文通過Carsim/Simulink聯(lián)合仿真平臺的雙移線實驗來驗證了整車控制模型的有效性以及對比PID控制和模糊控制的控制效果。如圖4所示是轉向盤轉角隨時間變化圖。
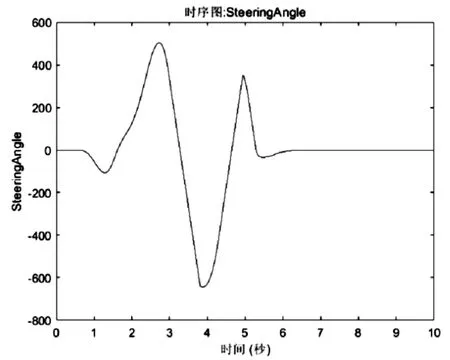
圖4 雙移線實驗轉向盤轉角
如圖5所示,對比了等轉矩控制和有直接橫擺力矩控制下的質心側偏角[9],由圖可知在質心側偏角的峰值處有直接橫擺力矩控制的車輛明顯減小了車輛質心側偏角,使得車輛的軌跡跟蹤性能更好,提高了車輛的操縱穩(wěn)定性。
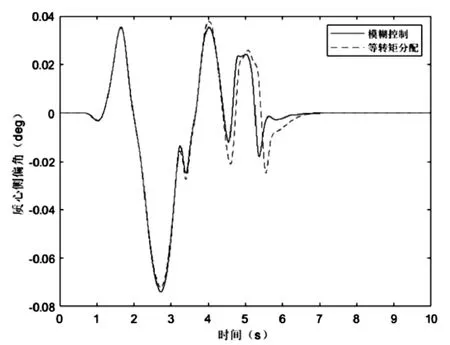
圖5 直接橫擺控制與等轉矩分配質心側偏角
在雙移線實驗中本文分別采用PID控制和模糊控制兩種控制算法,并對這兩種算法進行了對比。模糊控制下的橫擺角速度能夠更快得到達穩(wěn)定狀態(tài),更小的超調量,使得車輛的橫擺角速度比較穩(wěn)定,如圖6所示。
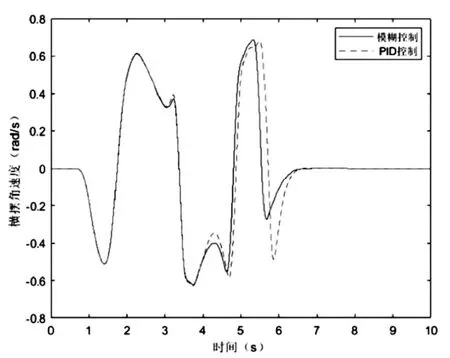
圖6 模糊控制與PID控制橫擺角速度對比
5 結論
基于轉矩的分布式電動汽車控制策略主要設計了雙層結構的橫擺穩(wěn)定性控制,在附加橫擺力矩的控制目標的基礎上,對車輛的左右驅動輪通過需求轉矩的等轉矩分配后進行在分配,這樣由于左右驅動輪的轉矩不相等就形成了一個附加橫擺力矩。在車輛發(fā)生過度轉向和不足轉向時,這個產生的附加橫擺力矩會幫助駕駛員使得車輛按照預期的軌跡行駛,減少車輛發(fā)生側滑或者其他危險工況的可能性。在雙移線試驗中顯示,基于轉矩的分布式電動汽車控制策略對車輛的操縱穩(wěn)定性有一定的提升。
